
A General Spline-Based Method for Centerline Extraction from Different Segmented Road Maps in Remote Sensing Imagery




Abstract
:
1. Introduction
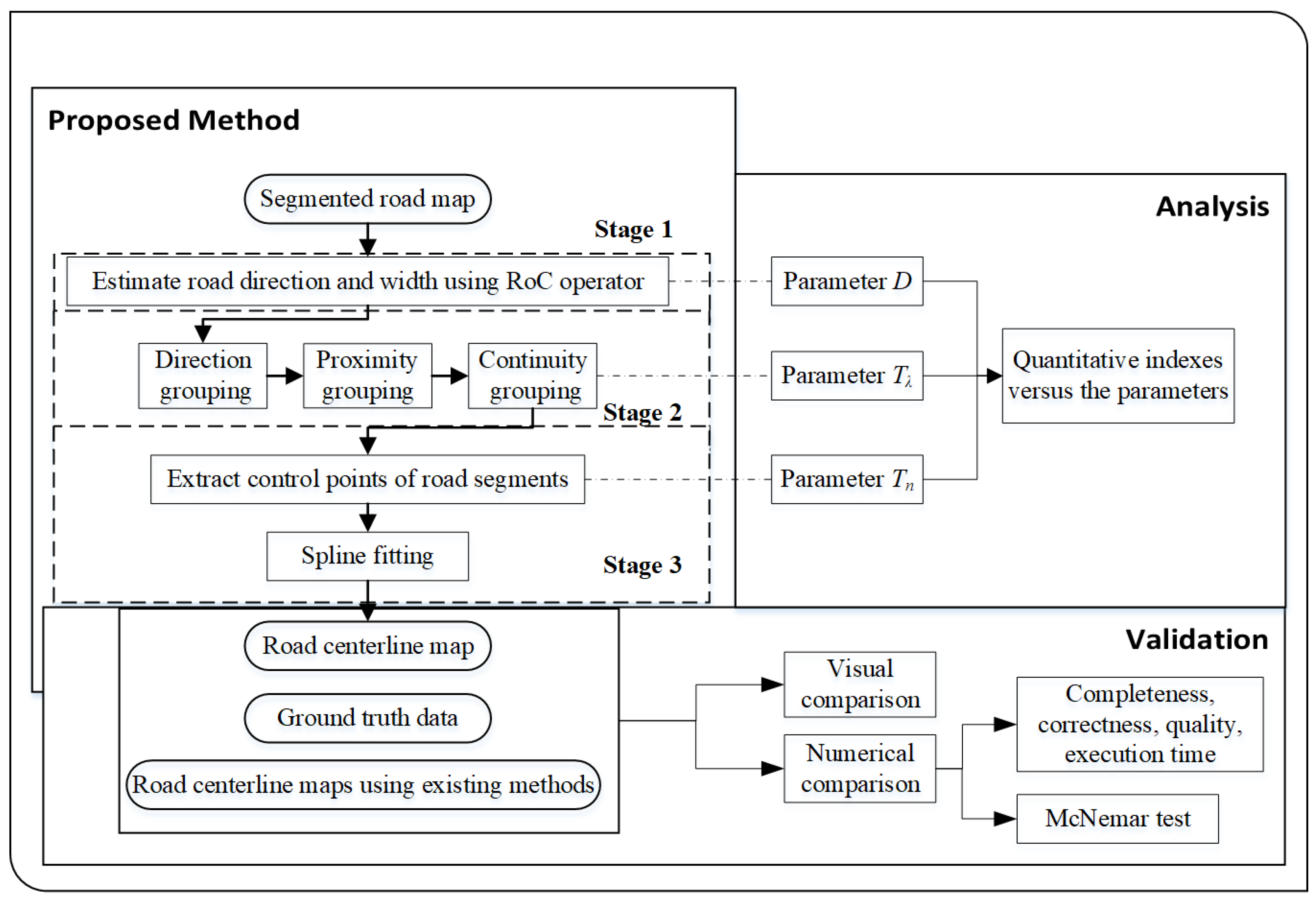
2. General Scheme of the Method
3. Methodology
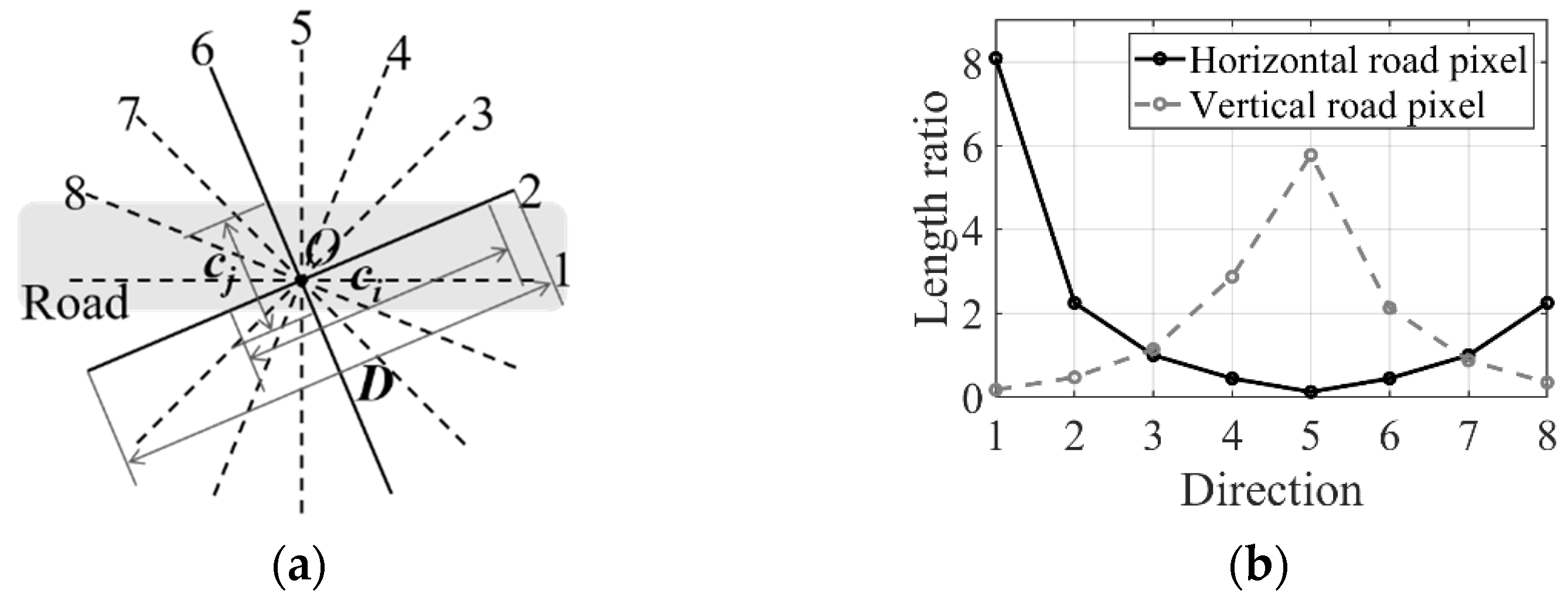
3.1. Ratio of Cross Detector for Feature Extraction
3.2. Object-Based Perceptual Grouping for Clustering
3.2.1. Direction Grouping
3.2.2. Proximity Grouping
| Algorithm 1. Proximity grouping |
| 1: Initialize flag , new label for all , counter . |
| 2: Sort in descending order according to areas of clusters. |
| 3: For each in sorted , do |
| 4: if is false, do |
| 5: ; ; ; |
| 6: end if |
| 7: for each , do |
| 8: If is false and , assign , . |
| 9: end for |
| 10: end for |
3.2.3. Continuity Grouping
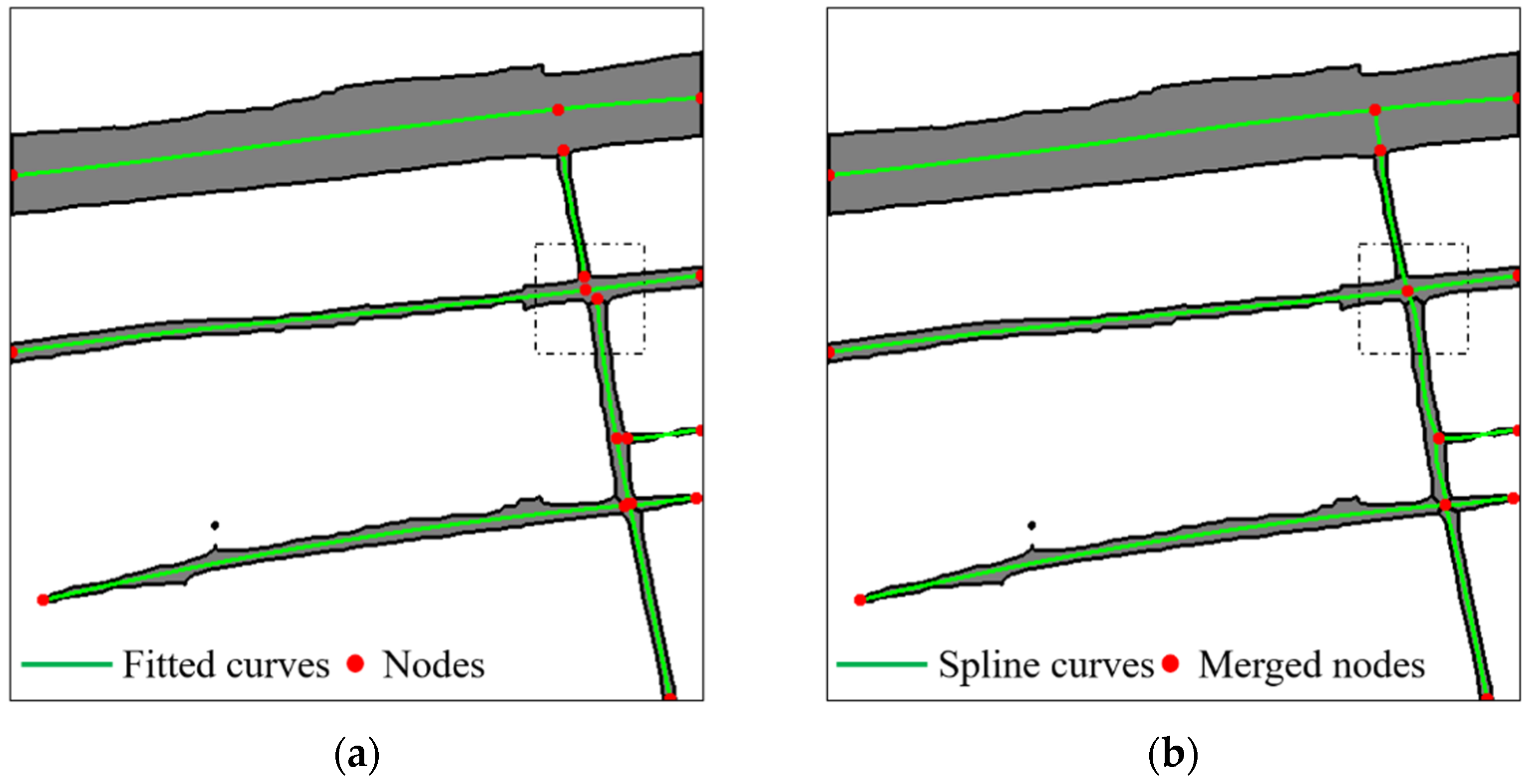
3.3. Road Centerline Extraction
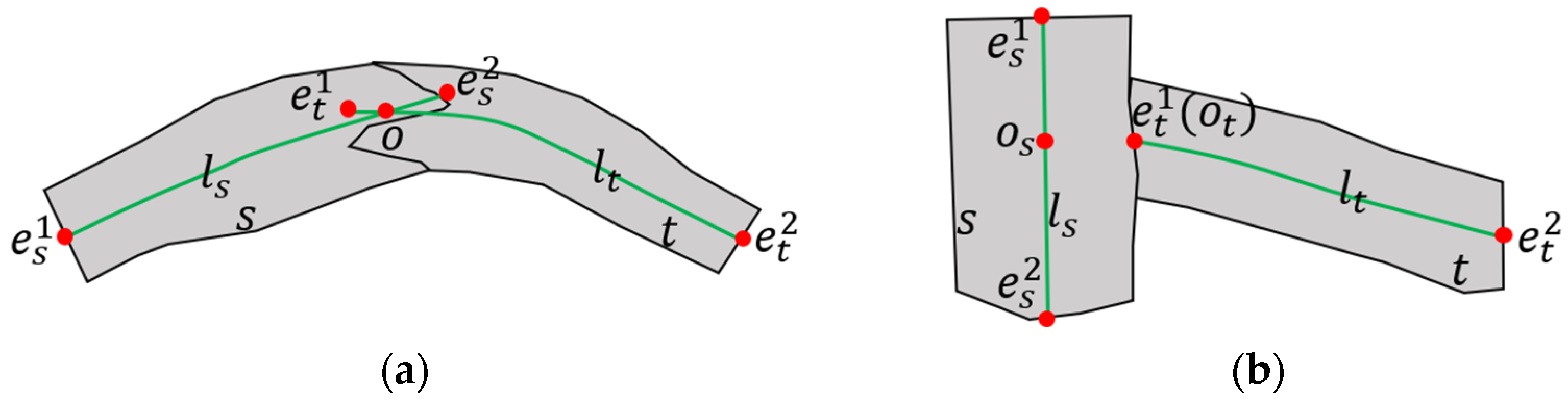
3.3.1. Control Point Searching
- (1)
- In the case that and have intersection points, the midpoint of intersections is added to the sets and .
- (2)
- In the case that and have no intersection points, determine the two closest points between and first. If and , add the point to the set and . Conversely, if and , put the point into the set and . For all other cases, the midpoint between and is the determined connection node and is added to the sets and .
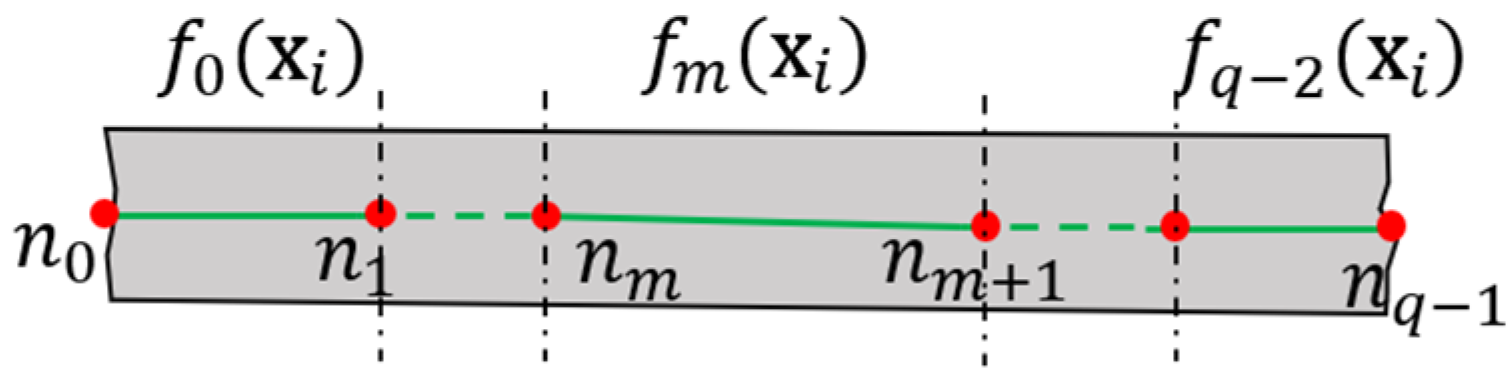
3.3.2. Spline Fitting
4. Experimental Results
4.1. Dataset Description and Result Evaluation
4.2. Experimental Results and Comparisons
4.2.1. Cases for Optical Images
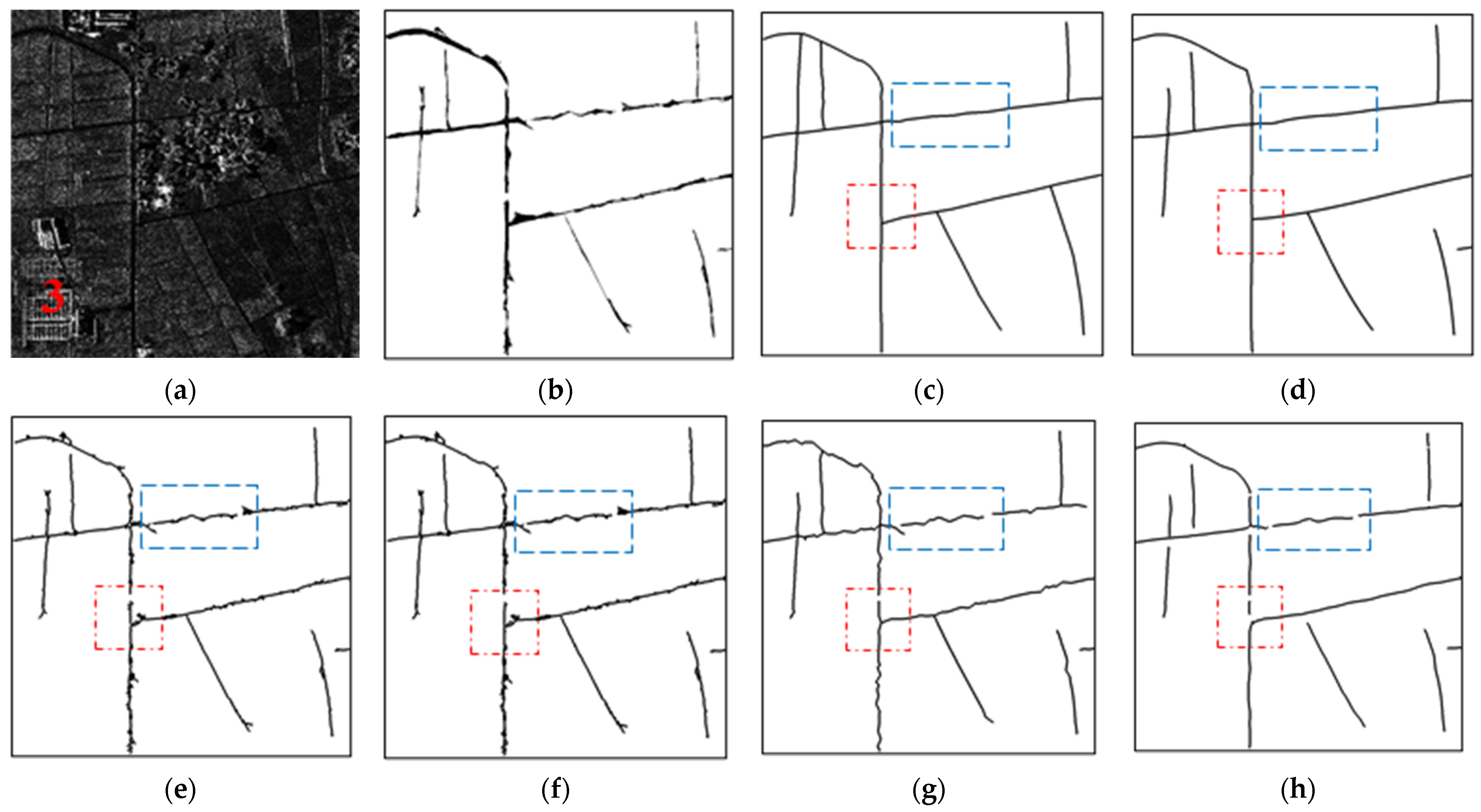
4.2.2. Cases for SAR Images
4.2.3. Cases for Labelled Road Images
4.2.4. Comparisons of Different Methods
5. Discussion
5.1. Analysis for RoC Detector
5.2. Analysis for Perceptual Grouping
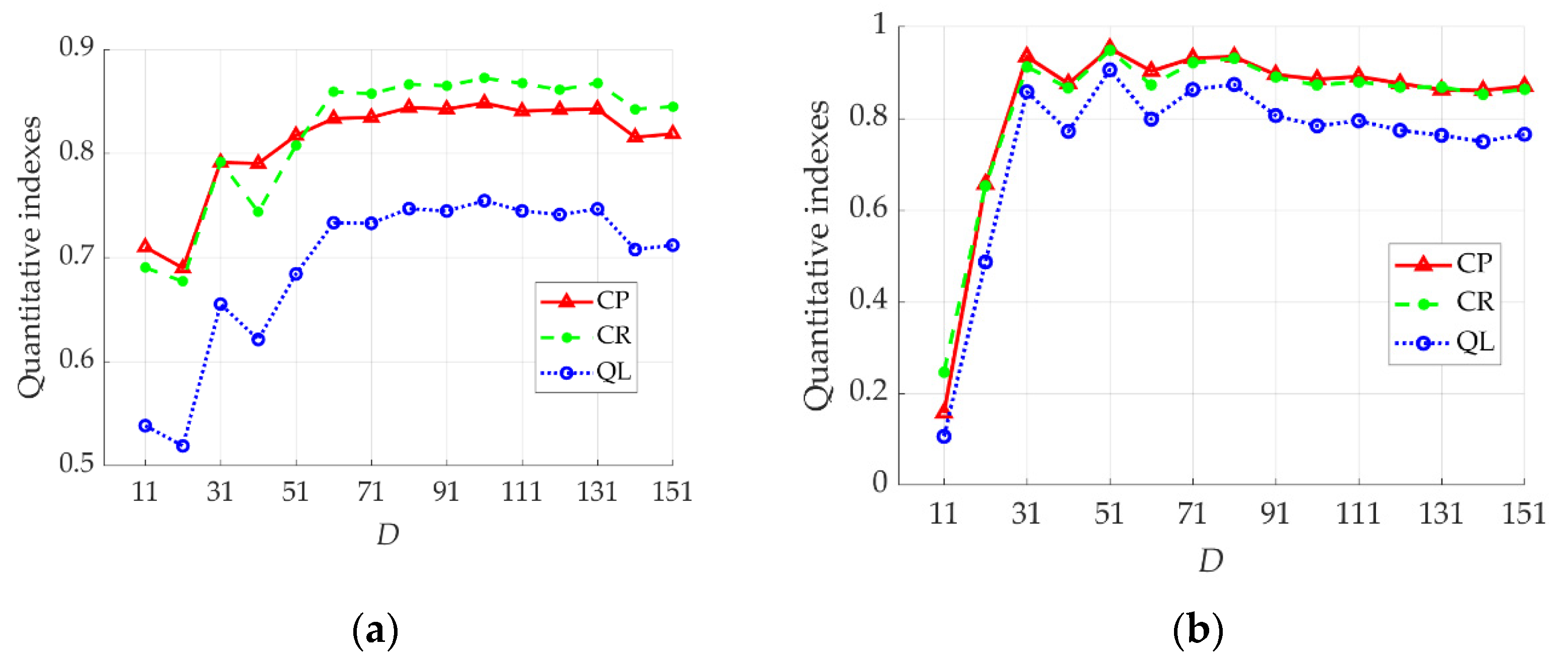
5.3. Analysis for Spline Fitting
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bulatov, D.; Häufel, G.; Pohl, M. Vectorization of road data extracted from aerial and uav imagery. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 567–574. [Google Scholar] [CrossRef] [Green Version]
- Zhou, J.; Bischof, W.F.; Caelli, T. Road tracking in aerial images based on human-computer interaction and Bayesian filtering. Isprs J. Photogramm. Remote Sens. 2006, 61, 108–124. [Google Scholar] [CrossRef] [Green Version]
- Cheng, J.; Gao, G. Parallel particle filter for tracking road centrelines from high-resolution SAR images using detected road junctions as initial seed points. Int. J. Remote Sens. 2016, 37, 4979–5000. [Google Scholar] [CrossRef]
- Dal Poz, A.P.; Zanin, R.B.; do Vale, G.M. Automated Extraction of Road Network from Medium- and High-Resolution Images. Pattern Recognit. Image Anal. Adv. Math. Theory Appl. 2006, 16, 239–248. [Google Scholar] [CrossRef]
- Wei, Y.; Zhang, K.; Ji, S. Simultaneous Road Surface and Centerline Extraction from Large-Scale Remote Sensing Images Using CNN-Based Segmentation and Tracing. IEEE Trans. Geosci. Remote Sens. 2020, 58, 8919–8931. [Google Scholar] [CrossRef]
- Sujatha, C.; Selvathi, D. Connected component-based technique for automatic extraction of road centerline in high resolution satellite images. Eurasip J. Image Video Process. 2015, 2015, 8. [Google Scholar] [CrossRef] [Green Version]
- Miao, Z.; Shi, W.; Zhang, H.; Wang, X. Road Centerline Extraction from High-Resolution Imagery Based on Shape Features and Multivariate Adaptive Regression Splines. IEEE Geosci. Remote Sens. Lett. 2013, 10, 583–587. [Google Scholar] [CrossRef]
- Cheng, G.; Zhu, F.; Xiang, S.; Wang, Y.; Pan, C. Accurate urban road centerline extraction from VHR imagery via multiscale segmentation and tensor voting. Neurocomputing 2016, 205, 407–420. [Google Scholar] [CrossRef] [Green Version]
- Zhou, T.; Sun, C.; Fu, H. Road Information Extraction from High-Resolution Remote Sensing Images Based on Road Reconstruction. Remote Sens. 2019, 11, 79. [Google Scholar] [CrossRef] [Green Version]
- Sironi, A.; Turetken, E.; Lepetit, V.; Fua, P. Multiscale Centerline Detection. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 1327–1341. [Google Scholar] [CrossRef] [Green Version]
- Wei, Y.; Hu, X.; Gong, J. End-to-End road centerline extraction via learning a confidence map. In Proceedings of the 2018 10th IAPR Workshop on Pattern Recognition in Remote Sensing, Beijing, China, 19–20 August 2018. [Google Scholar]
- Yang, X.; Li, X.; Ye, Y.; Lau, R.Y.K.; Zhang, X.; Huang, X. Road Detection and Centerline Extraction Via Deep Recurrent Convolutional Neural Network U-Net. IEEE Trans. Geosci. Remote Sens. 2019, 57, 7209–7220. [Google Scholar] [CrossRef]
- Negri, M.; Gamba, P.; Lisini, G.; Tupin, F. Junction-aware extraction and regularization of urban road networks in high-resolution, SAR images. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2962–2971. [Google Scholar] [CrossRef]
- Xiao, F.; Chen, Y.; Tong, L.; Yang, X. Coherence estimation in the low-backscattering area using multitemporal TerraSAR-X images and its application on road detection. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 898–901. [Google Scholar]
- Zhang, Z.; Zhang, X.; Sun, Y.; Zhang, P. Road Centerline Extraction from Very-High-Resolution Aerial Image and LiDAR Data Based on Road Connectivity. Remote Sens. 2018, 10, 1284. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Peng, B.; He, L.; Fan, K.; Tong, L. Road Segmentation of Unmanned Aerial Vehicle Remote Sensing Images Using Adversarial Network with Multiscale Context Aggregation. IEEE J.-Stars 2019, 12, 2279–2287. [Google Scholar] [CrossRef]
- Xiao, F.; Tong, L.; Luo, S. A Method for Road Network Extraction from High-Resolution SAR Imagery Using Direction Grouping and Curve Fitting. Remote Sens. 2019, 11, 2733. [Google Scholar] [CrossRef] [Green Version]
- Tarabalka, Y.; Fauvel, M.; Chanussot, J.; Benediktsson, J.A. SVM- and MRF-Based Method for Accurate Classification of Hyperspectral Images. IEEE Geosci. Remote Sens. Lett. 2010, 7, 736–740. [Google Scholar] [CrossRef] [Green Version]
- Stilla, U.; Michaelsen, E.; Soergel, U.; Schulz, K. Perceptual grouping of regular structures for automatic detection of man-made objects. In Proceedings of the 23rd International Geoscience and Remote Sensing Symposium (IGARSS 2003), Toulouse, France, 21–25 July 2003; pp. 3525–3527. [Google Scholar]
- He, L.; Chao, Y.; Suzuki, K. A Run-Based Two-Scan Labeling Algorithm. IEEE T Image Process. 2008, 17, 749–756. [Google Scholar]
- Avbelj, J.; Müller, R.; Bamler, R. A Metric for Polygon Comparison and Building Extraction Evaluation. IEEE Geosci. Remote Sens. Lett. 2015, 12, 170–174. [Google Scholar] [CrossRef] [Green Version]
- Jiang, M.; Miao, Z.; Gamba, P.; Yong, B. Application of Multitemporal InSAR Covariance and Information Fusion to Robust Road Extraction. IEEE Trans. Geosci. Remote 2017, 55, 3611–3622. [Google Scholar] [CrossRef]
- Marcal, A.R.S.; Castro, L. Hierarchical clustering of multispectral images using combined spectral and spatial criteria. IEEE Geosci. Remote Sens. Lett. 2005, 2, 59–63. [Google Scholar] [CrossRef]
- Yang, X. Nature-Inspired Optimization Algorithms; Academic Press: Cambridge, MA, USA, 2020. [Google Scholar]
- Demir, I.; Koperski, K.; Lindenbaum, D.; Pang, G.; Huang, J.; Basu, S.; Hughes, F.; Tuia, D.; Raskar, R. DeepGlobe 2018: A Challenge to Parse the Earth through Satellite Images. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Salt Lake City, UT, USA, 18–22 June 2018; pp. 172–181. [Google Scholar]
- Wiedemann, C.; Heipke, C.; Mayer, H.; Jamet, O. Empirical Evaluation Of Automatically Extracted Road Axes. Empir. Eval. Tech. Comput. Vis. 1998, 12, 172–187. [Google Scholar]
- Chen, B.; Ding, C.; Ren, W.; Xu, G. Extended Classification Course Improves Road Intersection Detection from Low-Frequency GPS Trajectory Data. ISPRS Int. J. Geo-Inf. 2020, 9, 181. [Google Scholar] [CrossRef] [Green Version]
- Foody, G.M. Thematic map comparison. Photogramm. Eng. Remote Sens. 2004, 70, 627–633. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Images | (pixels) | ||
|---|---|---|---|
| 1 | 101 | 0.01 | 10 |
| 2 | 101 | 0.001 | 30 |
| 3 | 61 | 0.001 | 20 |
| 4 | 61 | 0.005 | 10 |
| 5 | 51 | 0.001 | 10 |
| 6 | 51 | 0.005 | 20 |
| Test Images (Size) | Quantitative Indexes | Accuracy of Input Road Map | MT | ZST | MARS | NMS | Proposed Method |
|---|---|---|---|---|---|---|---|
| 1 (650 × 650) | CP (%) | 86.94 | 80.22 | 83.36 | 82.67 | 79.61 | 84.78 |
| CR (%) | 98.82 | 89.36 | 87.73 | 91.84 | 87.42 | 94.73 | |
| QL (%) | 86.05 | 73.22 | 74.66 | 77.01 | 71.43 | 80.97 | |
| ET (s) | - | 0.01 | 1.87 | 98.79 | 223.01 | 4.55 | |
| 2 (2500 × 2500) | CP (%) | 92.63 | 87.46 | 86.78 | 82.49 | 83.85 | 84.84 |
| CR (%) | 96.03 | 84.36 | 83.64 | 81.39 | 87.33 | 87.23 | |
| QL (%) | 89.21 | 75.26 | 74.19 | 69.40 | 74.76 | 75.47 | |
| ET (s) | - | 0.16 | 39.07 | 745.63 | 834.17 | 25.03 |
| Test Images (Size) | Quantitative Indexes | Accuracy of Input Road Map | MT | ZST | MARS | NMS | Proposed Method |
|---|---|---|---|---|---|---|---|
| 3 (860 × 860) | CP (%) | 92.12 | 90.46 | 90.23 | 78.92 | 86.53 | 89.37 |
| CR (%) | 99.05 | 77.45 | 76.83 | 82.05 | 94.96 | 94.47 | |
| QL (%) | 91.31 | 71.60 | 70.93 | 67.30 | 82.73 | 84.93 | |
| ET (s) | - | 0.01 | 1.36 | 86.07 | 128.76 | 12.38 | |
| 4 (1941 × 1585) | CP (%) | 70.45 | 68.33 | 67.30 | 64.28 | 65.89 | 68.02 |
| CR (%) | 77.76 | 64.06 | 65.54 | 67.78 | 76.22 | 74.73 | |
| QL (%) | 58.63 | 49.39 | 49.71 | 49.24 | 54.65 | 55.30 | |
| ET (s) | - | 0.03 | 6.15 | 247.85 | 397.56 | 43.18 |
| Test Images (Size) | Quantitative Indexes | Accuracy of Input Road Map | MT | ZST | MARS | NMS | Proposed Method |
|---|---|---|---|---|---|---|---|
| 5 (1024 × 1024) | CP (%) | 100 | 99.52 | 99.60 | 93.83 | 99.21 | 97.30 |
| CR (%) | 100 | 99.07 | 98.87 | 94.89 | 98.76 | 96.77 | |
| QL (%) | 100 | 98.61 | 98.48 | 89.31 | 97.99 | 94.24 | |
| ET (s) | - | 0.01 | 1.49 | 91.71 | 75.73 | 7.60 | |
| 6 (1024 × 1024) | CP (%) | 100 | 95.34 | 91.97 | 70.45 | 80.54 | 95.29 |
| CR (%) | 100 | 95.28 | 89.10 | 72.27 | 81.26 | 94.90 | |
| QL (%) | 100 | 91.03 | 82.67 | 55.46 | 67.93 | 90.64 | |
| ET (s) | - | 0.04 | 5.52 | 1849.60 | 2125.40 | 10.99 |
| Test Images | Proposed Method vs. MT | Proposed Method vs. ZST | Proposed Method vs. MARS | Proposed Method vs. NMS | MT vs. ZST | MT vs. MARS | MT vs. NMS | ZST vs. MARS | ZST vs. NMS | MARS vs. NMS |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 10.22 | 9.72 | 7.11 | 11.97 | −1.66 | −2.80 | 2.18 | −3.27 | 4.49 | 5.96 |
| 2 | 3.92 | 8.80 | 25.58 | 0.71 | 9.03 | 28.18 | 4.42 | 20.93 | −10.52 | −28.50 |
| 3 | 21.57 | 24.09 | 23.93 | 2.84 | 2.11 | 2.60 | −18.84 | 1.14 | −21.06 | −20.26 |
| 4 | 20.47 | 22.39 | 21.13 | 8.34 | −2.21 | 2.78 | −32.13 | 4.01 | −33.38 | −32.17 |
| 5 | −11.82 | −10.75 | 8.51 | −10.45 | 2.29 | 19.41 | 4.04 | 18.36 | 1.09 | −18.81 |
| 6 | −0.20 | 20.08 | 61.02 | 40.93 | 21.07 | 62.82 | 42.94 | 46.82 | 24.00 | −28.78 |
| Test Images (Size) | Proposed Method | Quantitative Indexes | |||
|---|---|---|---|---|---|
| CP (%) | CR (%) | QL (%) | ET (s) | ||
| 2 (2500 × 2500) | with MRF | 84.84 | 87.23 | 75.47 | 25.03 |
| without MRF | 84.03 | 85.73 | 73.72 | 25.98 | |
| 4 (1941 × 1585) | with MRF | 68.02 | 74.73 | 55.30 | 43.18 |
| without MRF | 64.59 | 70.09 | 50.64 | 74.98 | |
| 6 (1024 × 1024) | with MRF | 95.29 | 94.90 | 90.64 | 10.99 |
| without MRF | 95.07 | 94.12 | 89.74 | 10.69 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, F.; Tong, L.; Li, Y.; Luo, S.; Benediktsson, J.A. A General Spline-Based Method for Centerline Extraction from Different Segmented Road Maps in Remote Sensing Imagery. Remote Sens. 2022, 14, 2074. https://doi.org/10.3390/rs14092074
Xiao F, Tong L, Li Y, Luo S, Benediktsson JA. A General Spline-Based Method for Centerline Extraction from Different Segmented Road Maps in Remote Sensing Imagery. Remote Sensing. 2022; 14(9):2074. https://doi.org/10.3390/rs14092074
Chicago/Turabian StyleXiao, Fanghong, Ling Tong, Yuxia Li, Shiyu Luo, and Jón Atli Benediktsson. 2022. "A General Spline-Based Method for Centerline Extraction from Different Segmented Road Maps in Remote Sensing Imagery" Remote Sensing 14, no. 9: 2074. https://doi.org/10.3390/rs14092074
APA StyleXiao, F., Tong, L., Li, Y., Luo, S., & Benediktsson, J. A. (2022). A General Spline-Based Method for Centerline Extraction from Different Segmented Road Maps in Remote Sensing Imagery. Remote Sensing, 14(9), 2074. https://doi.org/10.3390/rs14092074