

A Method for Predicting Canopy Light Distribution in Cherry Trees Based on Fused Point Cloud Data

Abstract
:
1. Introduction
2. Materials and Methods
2.1. Experimental Site
2.2. Experimental Data Acquisition and Preprocessing
2.2.1. Vision System and Point Cloud Data Acquisition
2.2.2. Point Cloud Data Preprocessing
2.2.3. Light Data Acquisition and Preprocessing
2.3. Point Cloud Global Alignment Method
2.3.1. Coarse Alignment of Point Clouds Acquired by the Visual System
2.3.2. Coarse Alignment of Point Clouds Acquired by Different Stations
2.3.3. Precise Point Cloud Alignment
2.4. Canopy Light Distribution Prediction Method Based on a 3D Point Cloud Model
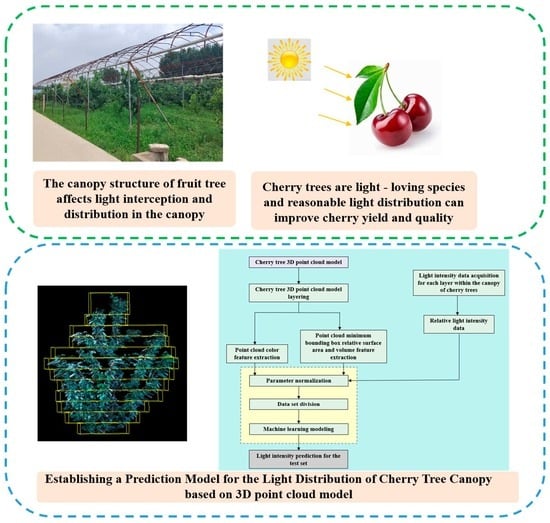
2.4.1. Light Distribution Prediction Method Flow
2.4.2. Point Cloud Layering
2.4.3. Point Cloud Relative Projection Area Feature Extraction
2.4.4. Point Cloud Minimum Bounding Box Feature Extraction
2.5. Performance Evaluation
2.5.1. Evaluation of the Point Cloud Data Preprocessing Result
2.5.2. Evaluation of the Point Cloud Data Registration Result
2.5.3. Evaluation of the Canopy Light Distribution Prediction Method
3. Results
3.1. Analysis of Point Cloud Preprocessing Results
3.2. Analysis of Cherry Tree Point Cloud Alignment Accuracy
3.3. Analysis of Cherry Tree Canopy Light Distribution Prediction Method
3.3.1. Dataset Construction
3.3.2. Predictive Model Selection
4. Discussion
4.1. Comparison of Different Alignment Methods
4.2. Effect of Different Point Cloud Feature Choices on Model Prediction Results
5. Conclusions
- (1)
- A visual system based on a binocular depth camera was built. Using this visual system to scan a cherry tree from both front and rear stations, complete color point cloud data of the cherry tree could be obtained quickly and accurately.
- (2)
- A global alignment method is proposed for the point cloud data of cherry trees based on the visual system we developed. Four randomly selected cherry trees in the cherry orchard were used as experimental objects. The ICP algorithm, SIFT-ICP algorithm, ISS-ICP algorithm and global alignment method proposed in this paper were compared and analyzed. The average time taken for the global alignment method proposed in this paper was 11.835 s, and the was 0.589 cm, which show effectively reduced alignment time and alignment error.
- (3)
- A method for quantifying the canopy structure of cherry trees is proposed. Firstly, the cherry tree point cloud model is stratified. Secondly, the point cloud projected area features are calculated using an alpha-shapes-based concave wrapping algorithm. The surface area and volume features of the minimum bounding box of the point cloud are calculated using the OBB-based minimum bounding box extraction algorithm. Finally, structural quantification of different areas of the cherry tree canopy is implemented in two dimensions and three dimensions.
- (4)
- A GBRT-based light prediction model for cherry tree canopies is proposed, which takes point cloud relative projected area features and the relative surface area and volume features of the minimum bounding box as inputs and the relative light intensity as output. The experimental results showed that the and between the predicted and actual values were 0.932 and 0.16, respectively. The model could more accurately predict the light distribution within the canopy of cherry trees.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Amatya, S.; Karkee, M.; Gongal, A.; Zhang, Q.; Whiting, M.D. Detection of cherry tree branches with full foliage in planar architecture for automated sweet-cherry harvesting. Biosyst. Eng. 2016, 144, 3–15. [Google Scholar] [CrossRef]
- Wilkie, J.D.; Conway, J.; Griffin, J.; Toegel, H. Relationships between canopy size, light interception and productivity in conventional avocado planting systems. J. Hortic. Sci. Biotechnol. 2019, 94, 481–487. [Google Scholar] [CrossRef]
- Chen, M.; Tang, Y.; Zou, X.; Huang, K.; Huang, Z.; Zhou, H.; Wang, C.; Lian, G. Three-dimensional perception of orchard banana central stock enhanced by adaptive multi-vision technology. Comput. Electron. Agric. 2020, 174, 105508. [Google Scholar] [CrossRef]
- Westling, F.; Underwood, J.; Örn, S. Light interception modelling using unstructured LiDAR data in avocado orchards. Comput. Electron. Agric. 2018, 153, 177–187. [Google Scholar] [CrossRef]
- Kolmanič, S.; Strnad, D.; Kohek, Š.; Benes, B.; Hirst, P.; Žalik, B. An algorithm for automatic dormant tree pruning. Appl. Soft Comput. 2020, 99, 106931. [Google Scholar] [CrossRef]
- Long, H.; James, S. Sensing and Automation in Pruning of Apple Trees: A Review. Agronomy 2018, 8, 211. [Google Scholar]
- Azlan, Z.; Sultan, M.M.; Long, H.; Paul, H.; Daeun, C.; James, S. Technological advancements towards developing a robotic pruner for apple trees: A review. Comput. Electron. Agric. 2021, 189, 106383. [Google Scholar]
- Yang, W.; Chen, X.; Saudreau, M.; Zhang, X.; Zhang, M.; Liu, H.; Costes, E.; Han, M. Canopy structure and light interception partitioning among shoots estimated from virtual trees: Comparison between apple cultivars grown on different interstocks on the Chinese Loess Plateau. Trees 2016, 30, 1723–1734. [Google Scholar] [CrossRef]
- Weiwei, Y.; Chen, X.; Zhang, M.; Gao, C.; Liu, H.; Saudreau, M.; Costes, E.; Han, M. Light interception characteristics estimated from three-dimensional virtual plants for two apple cultivars and influenced by combinations of rootstocks and tree architecture in Loess Plateau of China. Acta Hortic. 2017, 1160, 245–252. [Google Scholar]
- Rengarajan, R.; Schott, J.R. Modeling and Simulation of Deciduous Forest Canopy and Its Anisotropic Reflectance Properties Using the Digital Image and Remote Sensing Image Generation (DIRSIG) Tool. IEEE J. Stars. 2017, 10, 4805–4817. [Google Scholar] [CrossRef]
- Chelle, M.; Andrieu, B. The nested radiosity model for the distribution of light within plant canopies. Ecol. Model. 1998, 111, 75–91. [Google Scholar] [CrossRef]
- Jean, D.; Pascal, C.; Delphine, L.; Pierre, M. Using virtual plants to analyse the light-foraging efficiency of a low-density cotton crop. Ann. Bot. 2008, 101, 1153–1166. [Google Scholar]
- Zheng, C.; Wen, W.; Lu, X. Phenotypic traits extraction of wheat plants using 3D digitization. Smart Agric. 2022, 4, 150–162. [Google Scholar]
- Jaewoo, K.; Hyun, K.W.; Eek, S.J. Interpretation and Evaluation of Electrical Lighting in Plant Factories with Ray-Tracing Simulation and 3D Plant Modeling. Agronomy 2020, 10, 1545. [Google Scholar]
- Binglin, Z.; Fusang, L.; Ziwen, X.; Yan, G.; Baoguo, L.; Yuntao, M. Quantification of light interception within image-based 3D reconstruction of sole and intercropped canopies over the entire growth season. Ann. Bot. 2020, 126, 701–712. [Google Scholar]
- Li, S.; Zhu, J.; Evers, J. Estimating the differences of light capture between rows based on functional-structural plant model in simultaneous Maize-Soybean strip intercropping. Smart Agric. 2022, 4, 97–109. [Google Scholar]
- Ma, X.; Guo, C.; Zhang, X.; Ma, L.; Zhang, L.; Liu, G. Calculation of Light Distribution of Apple Tree Canopy Based on Color Characteristics of 3D Point Cloud. Trans. Chin. Soc. Agric. Mach. 2015, 46, 263–268. [Google Scholar] [CrossRef]
- Guo, C.; Zhang, W.; Liu, G.; Feng, J. Illumination Spatial Distribution Prediction Method Based on Apple Tree Canopy Box-Counting Dimension. Trans. Chin. Soc. Agric. Eng. 2018, 34, 177–183. [Google Scholar] [CrossRef]
- Shi, Y.; Geng, N.; Hu, S.; Zhang, Z.; Zhang, J. Illumination Distribution Model of Apple Tree Canopy Based on Random Forest Regression Algorithm. Trans. Chin. Soc. Agric. Mach. 2019, 50, 214–222. [Google Scholar] [CrossRef]
- Condotta, I.C.F.S.; Brown-Brandl, T.M.; Pitla, S.K.; Stinn, J.P.; Silva-Miranda, K.O. Evaluation of low-cost depth cameras for agricultural applications. Comput. Electron. Agr. 2020, 173, 105394. [Google Scholar] [CrossRef]
- Li, Z.; Guo, R.; Li, M.; Chen, Y.; Li, G. A review of computer vision technologies for plant phenotyping. Comput. Electron. Agr. 2020, 176, 105672. [Google Scholar] [CrossRef]
- Rincón, M.G.; Mendez, D.; Colorado, J.D. Four-Dimensional Plant Phenotyping Model Integrating Low-Density LiDAR Data and Multispectral Images. Remote Sens. 2022, 14, 356. [Google Scholar] [CrossRef]
- Lambertini, A.; Mandanici, E.; Tini, M.A.; Vittuari, L. Technical Challenges for Multi-Temporal and Multi-Sensor Image Processing Surveyed by UAV for Mapping and Monitoring in Precision Agriculture. Remote Sens. 2022, 14, 4954. [Google Scholar] [CrossRef]
- Zheng, L.; Wang, L.; Wang, M.; Ji, R. Automated 3D Reconstruction of Leaf Lettuce Based on Kinect Camera. Trans. Chin. Soc. Agric. Mach. 2021, 52, 159–168. [Google Scholar] [CrossRef]
- Guo, C.; Liu, G.; Zhang, W.; Feng, J. Apple tree canopy leaf spatial location automated extraction based on point cloud data. Comput. Electron. Agr. 2019, 166, 104975. [Google Scholar] [CrossRef]
- Qi, W.; Qin, Z. Three-Dimensional Reconstruction of a Dormant Tree Using RGB-D Cameras. In Proceedings of the 2013 American Society of Agricultural and Biological Engineers Annual International Meeting, Kansas, MO, USA, 21–24 July 2013. [Google Scholar]
- Ma, B.; Du, J.; Wang, L.; Jiang, H.; Zhou, M. Automatic branch detection of jujube trees based on 3D reconstruction for dormant pruning using the deep learning-based method. Comput. Electron. Agric. 2021, 190, 106484. [Google Scholar] [CrossRef]
- Besl, P.J.; McKay, N.D. A method for registration of 3-D shapes. In Proceedings of the Sensor Fusion IV: Control Paradigms and Data Structures, Boston, MA, USA, 14–15 November 1991. [Google Scholar]
- Saarinen, J.; Andreasson, H.; Stoyanov, T.; Lilienthal, A.J. Normal distributions transform Monte-Carlo localization (NDT-MCL). In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, 3–7 November 2013. [Google Scholar]
- Du, S.; Liu, J.; Zhang, C.; Zhu, J.; Ke, L. Probability iterative closest point algorithm for m-D point set registration with noise. Neurocomputing 2015, 157, 187–198. [Google Scholar] [CrossRef]
- Du, S.; Xu, G.; Zhang, S.; Zhang, X.; Gao, Y.; Chen, B. Robust rigid registration algorithm based on pointwise correspondence and correntropy. Pattern Recogn. Lett. 2020, 132, 91–98. [Google Scholar] [CrossRef]
- Yan, J.; Shan, J.; Jiang, W. A global optimization approach to roof segmentation from airborne lidar point clouds. ISPRS J. Photogramm. 2014, 94, 183–193. [Google Scholar] [CrossRef]
- Xijiang, C.; Hao, W.; Derek, L.; Xianquan, H.; Ya, B.; Peng, L.; Hui, D. Extraction of indoor objects based on the ex-ponential function density clustering model. Inform. Sci. 2022, 607, 1111–1135. [Google Scholar]
- Yusheng, X.; Wei, Y.; Sebastian, T.; Ludwig, H.; Uwe, S. Unsupervised Segmentation of Point Clouds from Buildings Using Hierarchical Clustering Based on Gestalt Principles. IEEE J. Stars. 2018, 11, 4270–4286. [Google Scholar]
- Guichao, L.; Yunchao, T.; Xiangjun, Z.; Chenglin, W. Three-dimensional reconstruction of guava fruits and branches using instance segmentation and geometry analysis. Comput. Electron. Agric. 2021, 184, 106107. [Google Scholar]
- Rusu, R.B.; Cousins, S. 3D is here: Point Cloud Library (PCL). In Proceedings of the IEEE International Conference on Robotics & Automation, Shanghai, China, 9–13 May 2011. [Google Scholar]
- Liu, W.; Xie, Y.; Chen, R. Observation of relationship between zenith luminance and sun high angle. Opto-Electron. Eng. 2012, 39, 49–54. [Google Scholar]
- Liu, R.; Tang, Y.Y.; Fang, B.; Pi, J. An enhanced version and an incremental learning version of visual-attention-imitation convex hull algorithm. Neurocomputing 2014, 133, 231–236. [Google Scholar] [CrossRef]
- Zheng, Y. Canopy Parameter Estimation of Citrus grandis var. Longanyou Based on LiDAR 3D Point Clouds. Remote Sens. 2021, 13, 1859. [Google Scholar]
- Ji, Y.; Li, S.; Peng, C.; Xu, H.; Cao, R.; Zhang, M. Obstacle detection and recognition in farmland based on fusion point cloud data. Comput. Electron. Agric. 2021, 189, 106409. [Google Scholar] [CrossRef]
- Xinkai, C.; Ni, R.; Ganglu, T.; Yuxing, F.; Qingling, D. A three-dimensional prediction method of dissolved oxygen in pond culture based on Attention-GRU-GBRT. Comput. Electron. Agric. 2021, 181, 105955. [Google Scholar]
- Scovanner, P.; Ali, S.; Shah, M. A 3-dimensional sift descriptor and its application to action recognition. In Proceedings of the 15th International Conference on Multimedia 2007, Augsburg, Germany, 24–29 September 2007. [Google Scholar]
- Zhu, T.; Ma, X.; Guan, H.; Wu, X.; Wang, F.; Yang, C.; Jiang, Q. A calculation method of phenotypic traits based on three-dimensional reconstruction of tomato canopy. Comput. Electron. Agric. 2023, 204, 107515. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Effective distance | 0.5~3.86 m |
| Frame rate | 30 fps |
| Color camera resolution | 1920 × 1080 pix |
| Depth camera resolution | 640 × 576 pix |
| Field of view | 90° × 59° |
| Cherry Tree Number | Tree Height/m | Maximum Crown Width/m | Age/Year |
|---|---|---|---|
| Tree1 | 2.5 | 1.55 | 3 |
| Tree2 | 2.3 | 1.9 | 3 |
| Tree3 | 2.5 | 2.4 | 4 |
| Number of Point Cloud Layers | Number of Points in Concave Hull Sets | Projected Area/m2 | Relative Projected Area/m2 |
|---|---|---|---|
| 1 | 134 | 0.1206 | 0.1057 |
| 2 | 226 | 0.1062 | 0.0931 |
| 3 | 325 | 0.1578 | 0.1383 |
| 4 | 377 | 0.2444 | 0.2142 |
| 5 | 419 | 0.6706 | 0.5876 |
| 6 | 402 | 0.2803 | 0.2456 |
| 7 | 389 | 0.5473 | 0.4796 |
| 8 | 295 | 0.4316 | 0.3782 |
| 9 | 212 | 0.3131 | 0.2743 |
| 10 | 188 | 0.0895 | 0.0784 |
| 11 | 91 | 0.0047 | 0.0041 |
| 12 | 79 | 0.066 | 5.806 |
| total | 360 | 1.14125 | 1 |
| Number of Point Cloud Layers | Relative Surface Area of the Minimum Bounding Box/m2 | Relative Volume of the Minimum Bounding Box/ m3 |
|---|---|---|
| 1 | 0.064 | 0.012 |
| 2 | 0.120 | 0.024 |
| 3 | 0.162 | 0.033 |
| 4 | 0.214 | 0.049 |
| 5 | 0262 | 0.058 |
| 6 | 0.236 | 0.05 |
| 7 | 0.267 | 0.06 |
| 8 | 0.25 | 0.059 |
| 9 | 0.125 | 0.025 |
| 10 | 0.098 | 0.021 |
| 11 | 0.038 | 0.007 |
| 12 | 0.05 | 0.01 |
| total | 1 | 1 |
| Cherry Tree Number | Coarse Alignment | Precise Alignment | ||
|---|---|---|---|---|
| Time/s | RMSE/cm | Time/s | RMSE/cm | |
| 1 | 11.178 | 0.998 | 3.103 | 0.679 |
| 2 | 13.747 | 1.154 | 4.204 | 0.662 |
| 3 | 10.645 | 1.085 | 4.228 | 0.628 |
| 4 | 14.752 | 1.128 | 5.227 | 0.712 |
| Cherry Tree Number | Coarse Alignment | Precise Alignment | ||
|---|---|---|---|---|
| Time/s | RMSE/cm | Time/s | RMSE/cm | |
| 1 | 4.523 | 0.935 | 2.598 | 0.520 |
| 2 | 3.941 | 0.700 | 2.637 | 0.498 |
| 3 | 3.301 | 0.782 | 4.228 | 0.435 |
| 4 | 5.148 | 0.887 | 5.227 | 0.582 |
| Model | ||
|---|---|---|
| LR | 0.041 | 0.567 |
| SVR | 0.049 | 0.554 |
| AdaBoost | 0.715 | 0.265 |
| GBRT | 0.932 | 0.116 |
| Alignment Method | Time/s | RMSE/cm |
|---|---|---|
| SIFT-ICP | 15.827 | 0.982 |
| ISS-NDT | 12.528 | 0.728 |
| ISS-ICP | 13.429 | 0.694 |
| ISS-bi-KD-tree-ICP | 11.835 | 0.589 |
| Feature Combination Schemes | Feature Combination Results |
|---|---|
| Scheme 1 | Relative projection area |
| Scheme 2 | Relative surface area and volume of the minimum bounding box |
| Scheme 3 | Relative projection area, relative surface area and volume of the minimum enclosing box |
| Feature Combination Schemes | ||
|---|---|---|
| Scheme 1 | 0.919 | 0.136 |
| Scheme 2 | 0.915 | 0.137 |
| Scheme 3 | 0.932 | 0.116 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, Y.; Liu, G.; Li, S.; Zheng, Z.; Si, Y.; Wang, Y. A Method for Predicting Canopy Light Distribution in Cherry Trees Based on Fused Point Cloud Data. Remote Sens. 2023, 15, 2516. https://doi.org/10.3390/rs15102516
Yin Y, Liu G, Li S, Zheng Z, Si Y, Wang Y. A Method for Predicting Canopy Light Distribution in Cherry Trees Based on Fused Point Cloud Data. Remote Sensing. 2023; 15(10):2516. https://doi.org/10.3390/rs15102516
Chicago/Turabian StyleYin, Yihan, Gang Liu, Shanle Li, Zhiyuan Zheng, Yongsheng Si, and Yang Wang. 2023. "A Method for Predicting Canopy Light Distribution in Cherry Trees Based on Fused Point Cloud Data" Remote Sensing 15, no. 10: 2516. https://doi.org/10.3390/rs15102516