
Robust Pedestrian Dead Reckoning Integrating Magnetic Field Signals and Digital Terrestrial Multimedia Broadcasting Signals


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Magnetic Field Landmark Detection Based on SNN
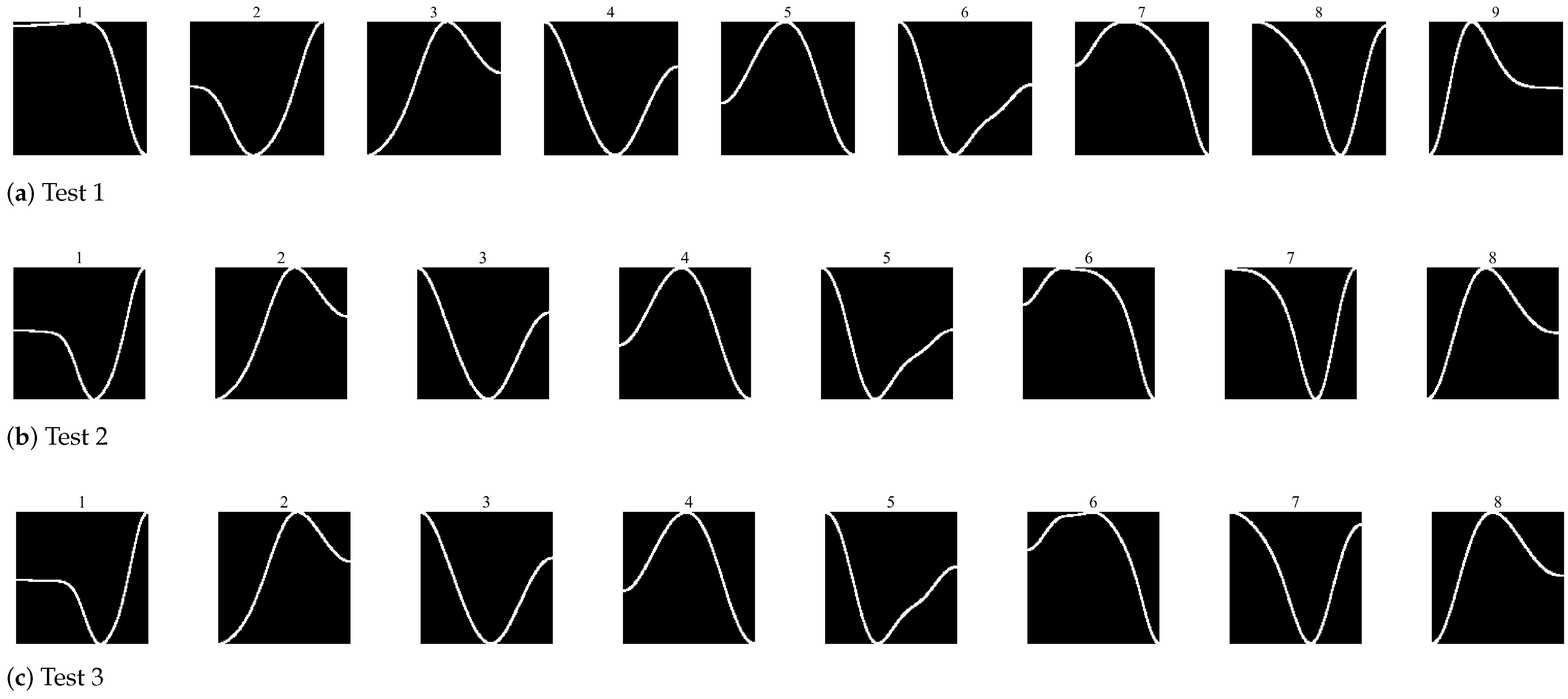
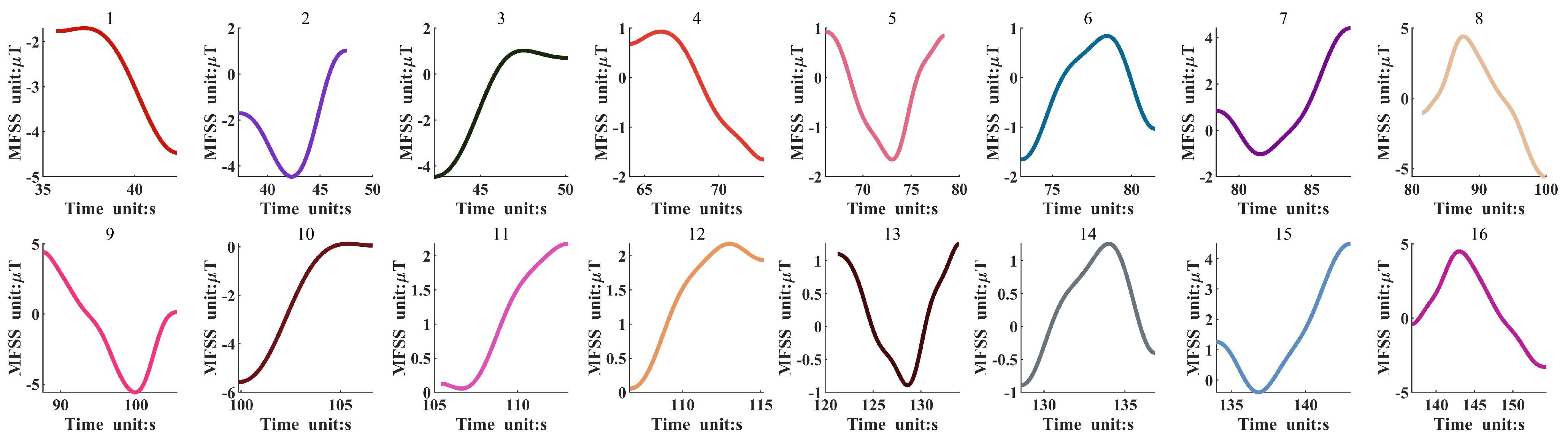
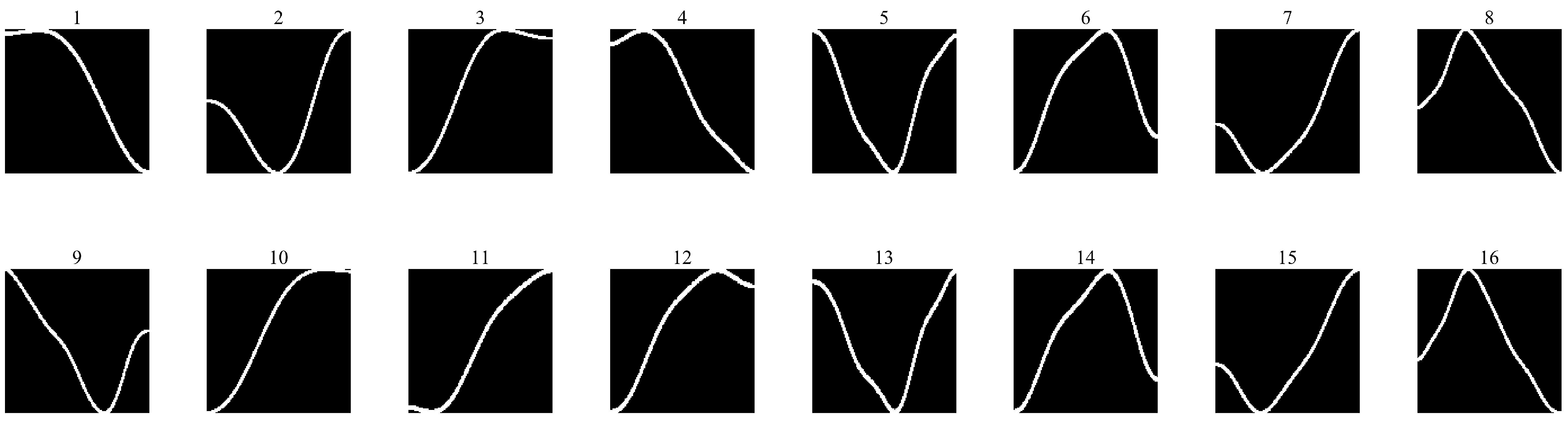
2.1. Construction of Magnetic Field Landmark Database
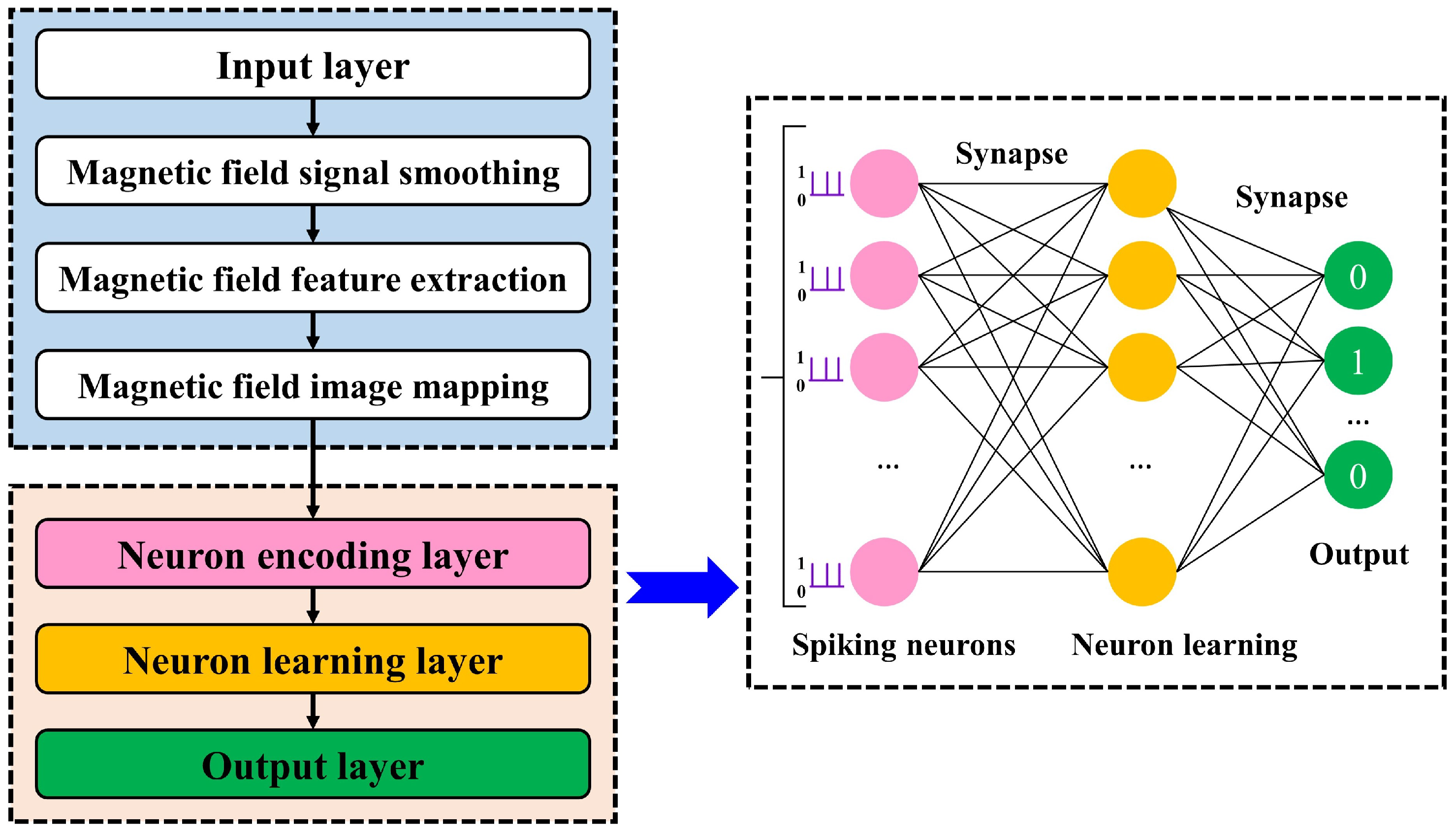
2.2. SNN Architecture
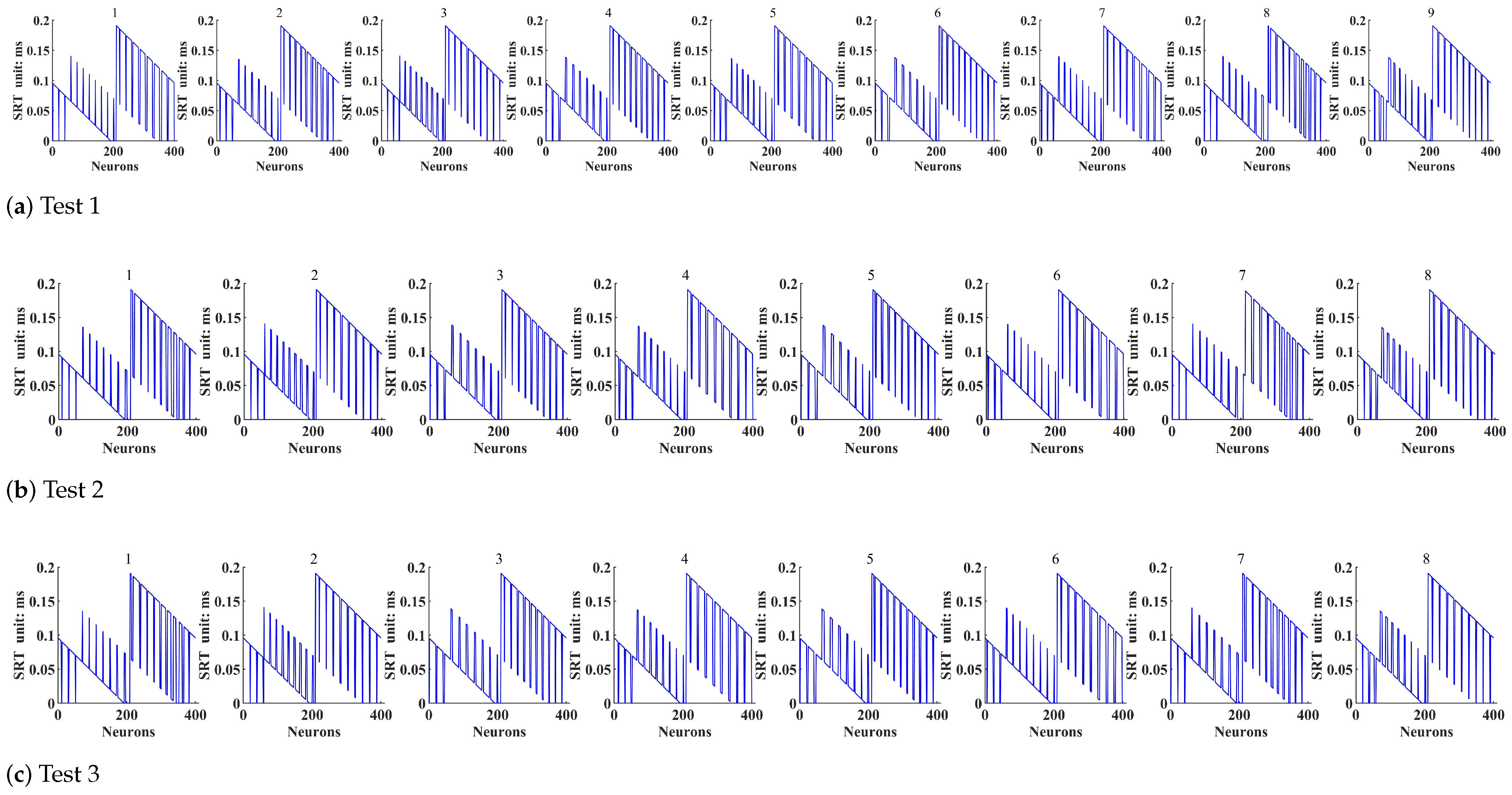
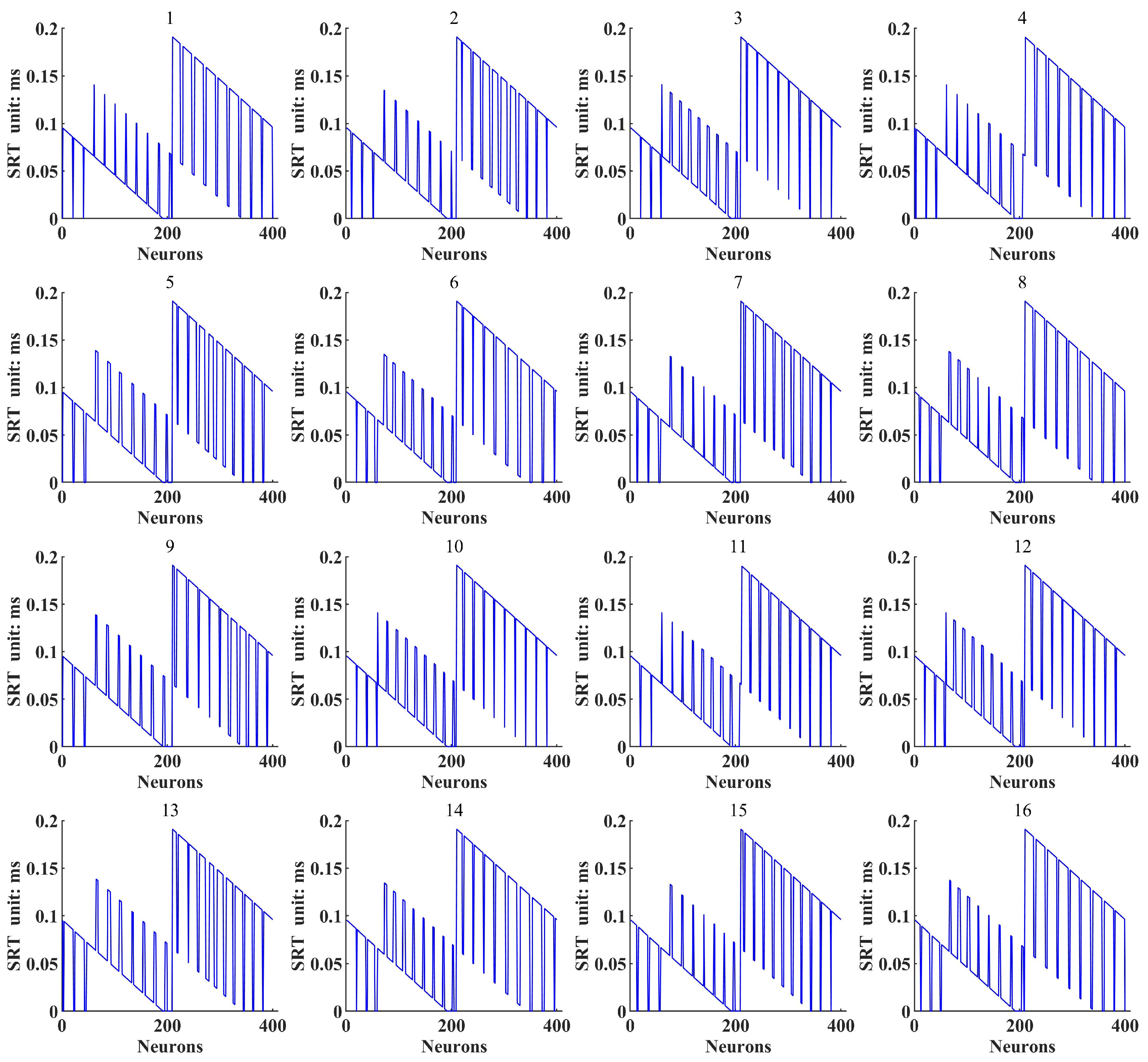
2.2.1. Neuron Encoding Model
2.2.2. Neuron Dynamics Model
2.2.3. Neuron Learning Mechanism
3. Ranging Based on DTMB Signals
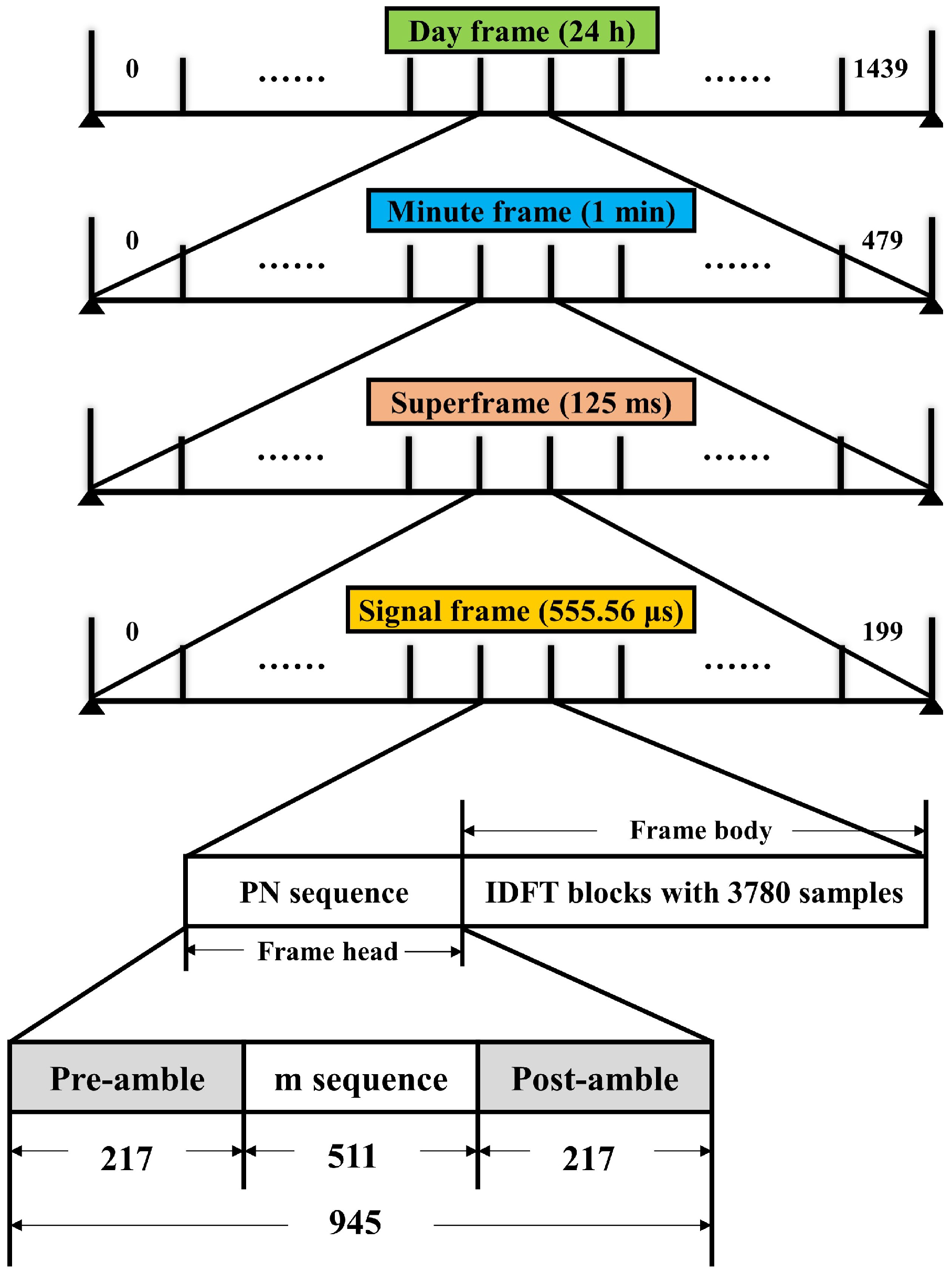
3.1. DTMB System Description
3.2. Ranging Estimation
4. Hybrid PDR Integrating Magnetic Field Signals and DTMB Signals
4.1. Optimal Landmark Selection
4.2. Hybrid Positioning Model
5. Tests and Results
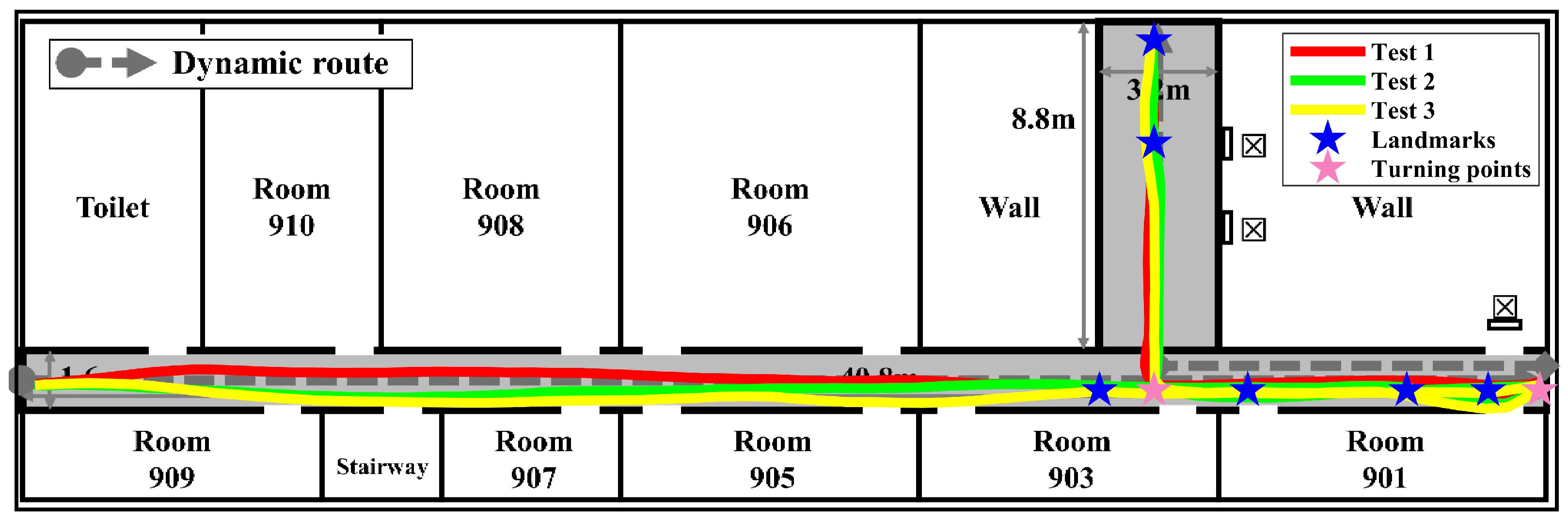
5.1. Indoor Tests
5.2. Outdoor Tests
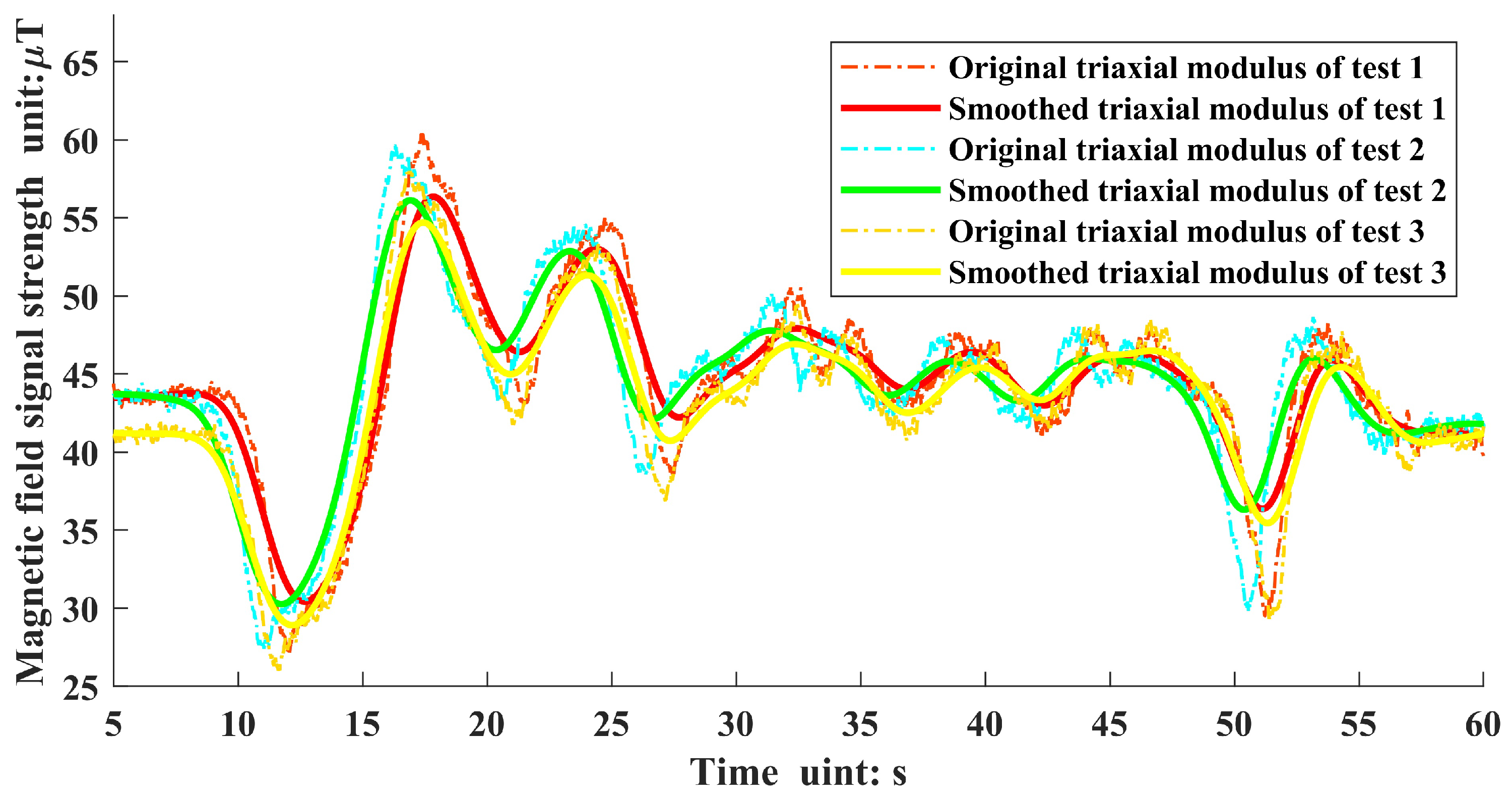
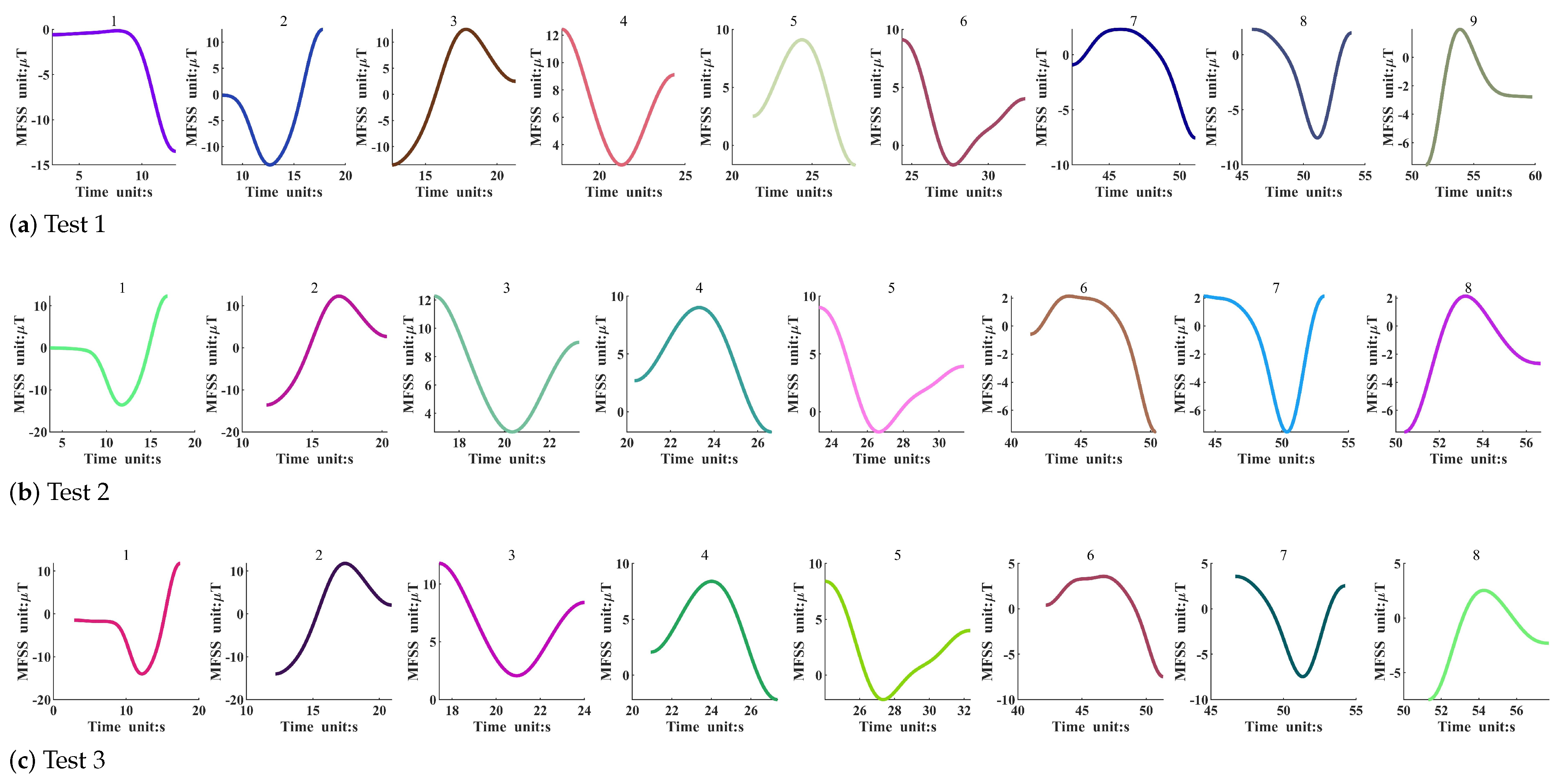
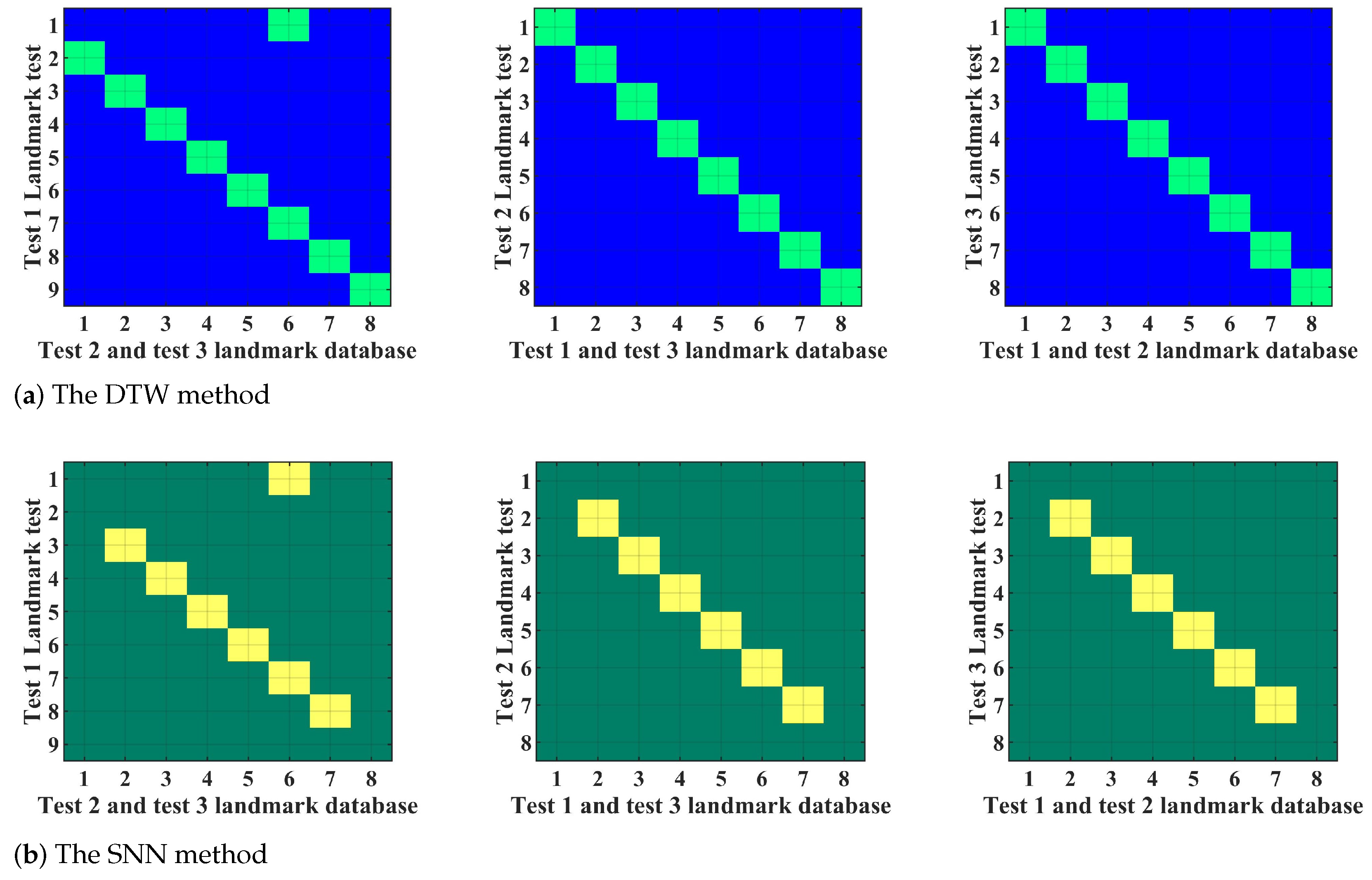
5.2.1. The Magnetic Field Landmark Detection Results
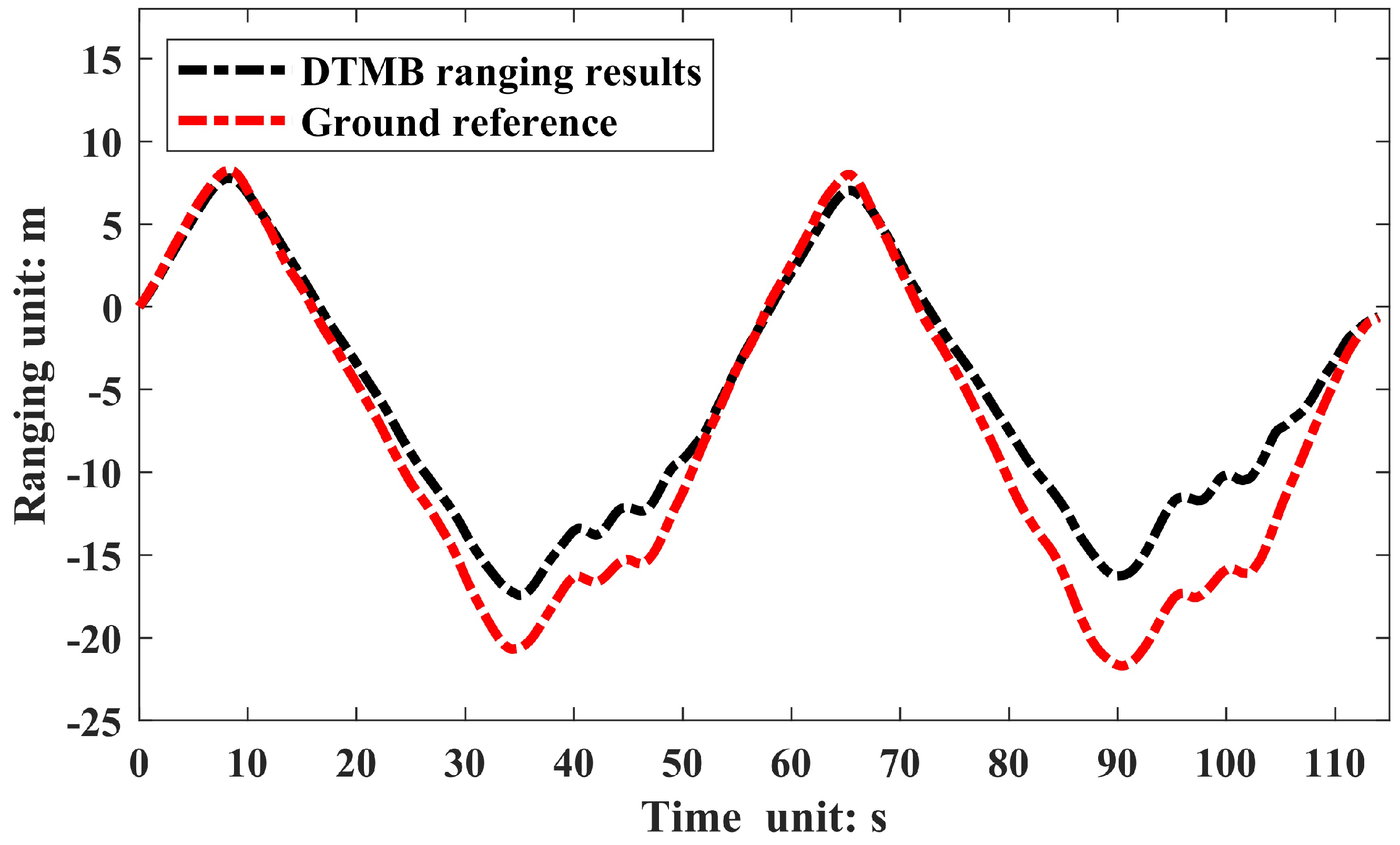
5.2.2. The Ranging Results from DTMB Signals
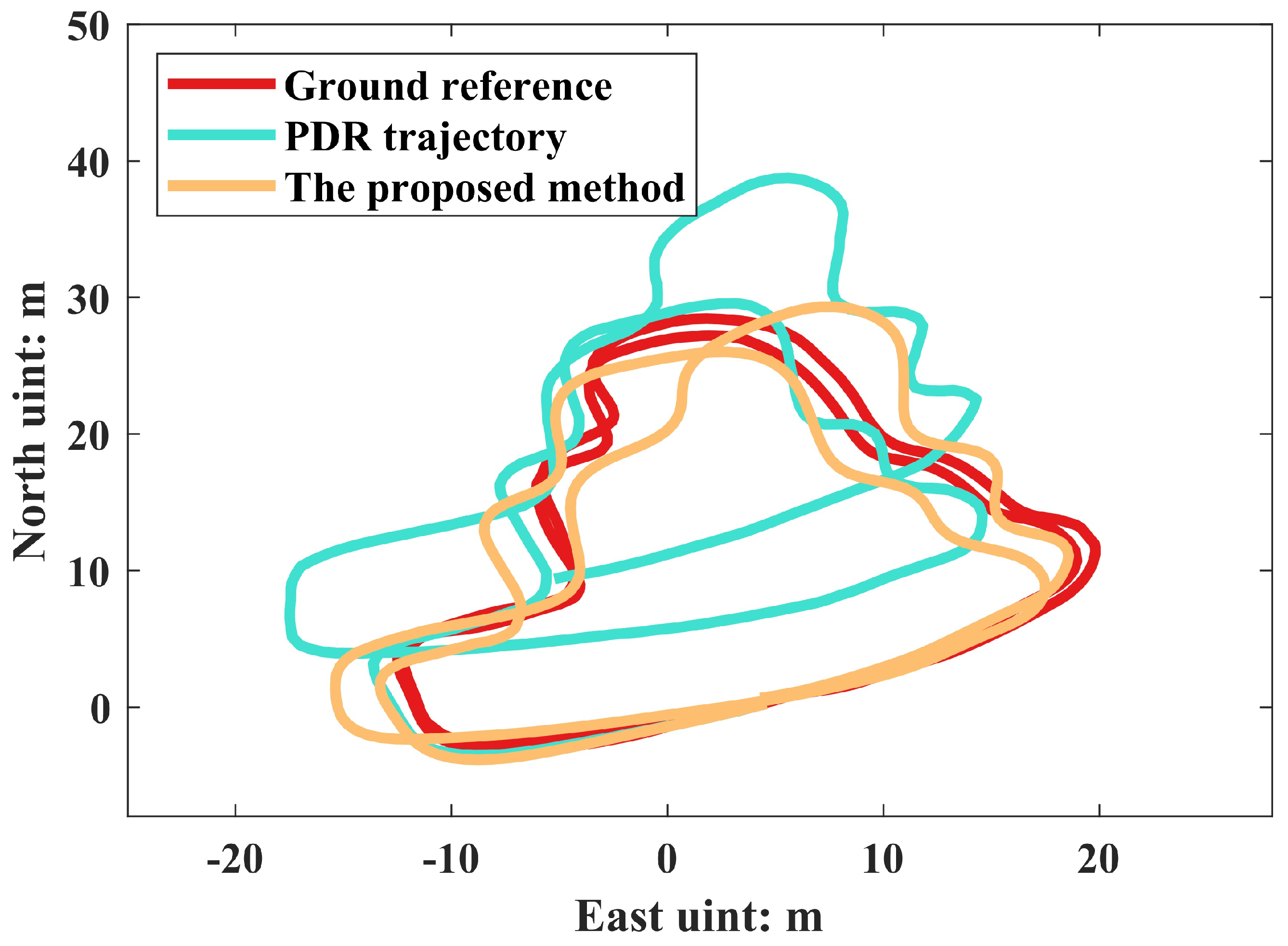
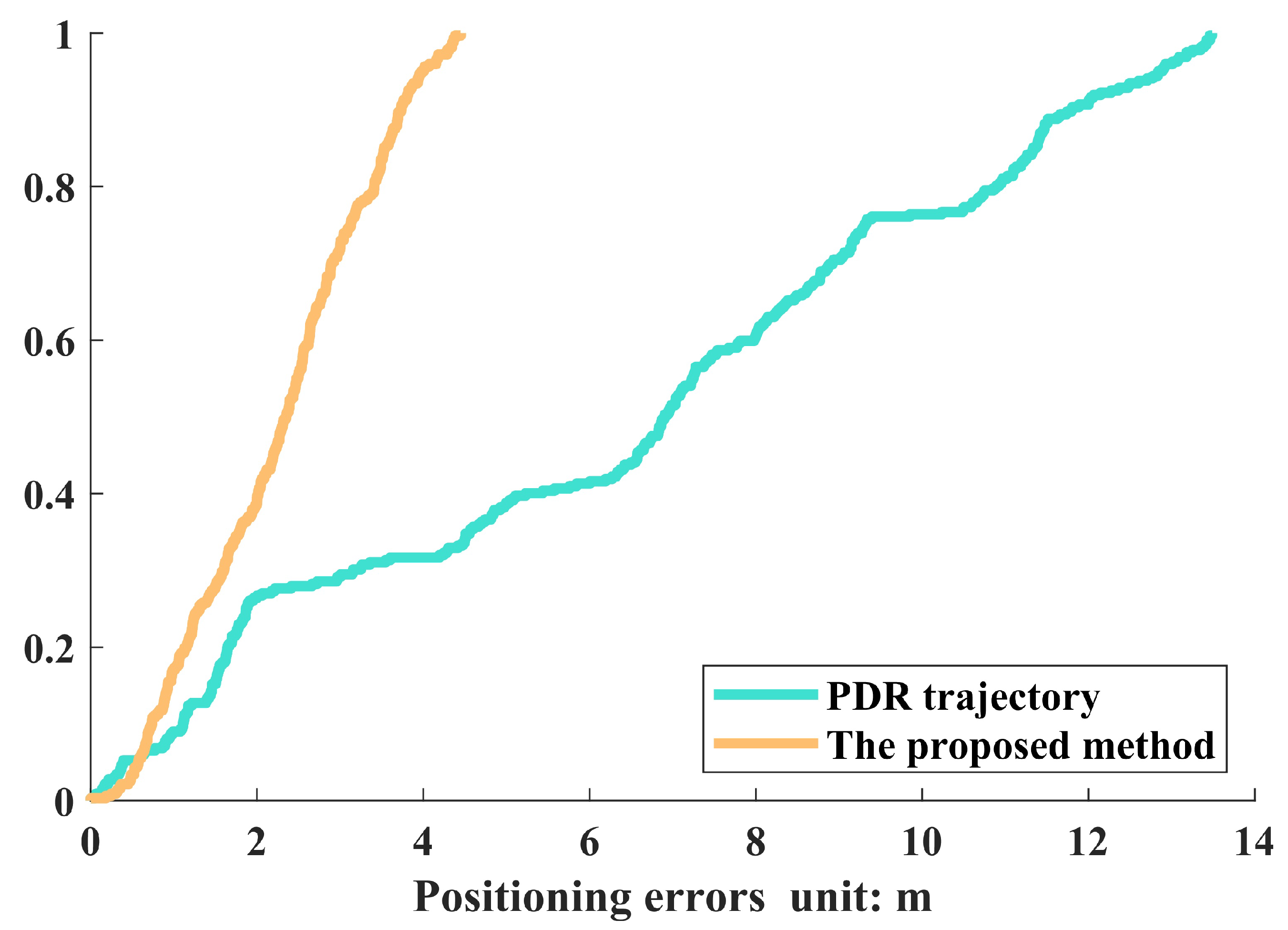
5.2.3. The Fusing Positioning Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Li, Y.; Mi, J.; Xu, Y.; Li, B.; Jiang, D.; Liu, W. A robust adaptive filtering algorithm for GNSS single-frequency RTK of smartphone. Remote Sens. 2022, 14, 6388. [Google Scholar] [CrossRef]
- Feng, X.; Nguyen, K.A.; Luo, Z. WiFi access points line-of-sight detection for indoor positioning using the signal round trip Time. Remote Sens. 2022, 14, 6052. [Google Scholar] [CrossRef]
- Yu, Z.; Chaczko, Z.; Shi, J. A novel algorithm modelling for UWB localization accuracy in remote sensing. Remote Sens. 2022, 14, 4902. [Google Scholar] [CrossRef]
- Liu, Z.; Chen, L.; Zhou, X.; Shen, N.; Chen, R. Multipath tracking with LTE signals for accurate TOA estimation in the application of indoor positioning. Geo-Spat. Inf. Sci. 2023, 26, 31–43. [Google Scholar] [CrossRef]
- Ruan, Y.; Chen, L.; Zhou, X.; Liu, Z.; Liu, X.; Guo, G.; Chen, R. iPos-5G: Indoor positioning via commercial 5G NR CSI. IEEE Internet Things J. 2022, 10, 8718–8733. [Google Scholar] [CrossRef]
- Cao, S.; Chen, X.; Zhang, X.; Chen, X. Effective audio signal arrival time detection algorithm for realization of robust acoustic indoor positioning. IEEE Trans. Instrum. Meas. 2020, 69, 7341–7352. [Google Scholar] [CrossRef]
- Harle, R. A survey of indoor inertial positioning systems for pedestrians. IEEE Commun. Surv. Tutor. 2013, 15, 1281–1293. [Google Scholar] [CrossRef]
- Ashraf, I.; Zikria, Y.B.; Hur, S.; Park, Y. A comprehensive analysis of magnetic field based indoor positioning with smartphones: Opportunities, challenges and practical limitations. IEEE Access 2020, 8, 228548–228571. [Google Scholar] [CrossRef]
- Kuang, J.; Li, T.; Niu, X. Magnetometer bias insensitive magnetic field matching based on pedestrian dead reckoning for smartphone indoor positioning. IEEE Sens. J. 2021, 22, 4790–4799. [Google Scholar] [CrossRef]
- Subbu, K.P.; Gozick, B.; Dantu, R. LocateMe: Magnetic-fieldsbased indoor localization using smartphones. ACM Trans. Intell. Syst. Technol. 2013, 4, 73. [Google Scholar] [CrossRef]
- Abid, M.; Compagnon, P.; Lefebvre, G. Improved CNN-based magnetic indoor positioning system using attention mechanism. In Proceedings of the 2021 International Conference on Indoor Positioning and Indoor Navigation (IPIN), IEEE, Lloret de Mar, Spain, 29 November–2 December 2021; pp. 1–8. [Google Scholar]
- Bae, H.J.; Choi, L. Large-scale indoor positioning using geomagnetic field with deep neural networks. In Proceedings of the 2019 IEEE International Conference on Communications (ICC 2019), IEEE, Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar]
- Roy, K.; Jaiswal, A.; Panda, P. Towards spike-based machine intelligence with neuromorphic computing. Nature 2019, 575, 607–617. [Google Scholar] [CrossRef]
- Gütig, R.; Sompolinsky, H. The tempotron: A neuron that learns spike timing-based decisions. Nat. Neurosci. 2006, 9, 420–428. [Google Scholar] [CrossRef] [PubMed]
- Fang, W.; Yu, Z.; Chen, Y.; Masquelier, T.; Huang, T.; Tian, Y. Incorporating learnable membrane time constant to enhance learning of spiking neural networks. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, QC, Canada, 10–17 October 2021; pp. 2661–2671. [Google Scholar]
- Kim, S.; Park, S.; Na, B.; Yoon, S. Spiking-yolo: Spiking neural network for energy-efficient object detection. In Proceedings of the AAAI Conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2020; Volume 34, pp. 11270–11277. [Google Scholar]
- Chen, L.; Thevenon, P.; Seco-Granados, G.; Julien, O.; Kuusniemi, H. Analysis on the TOA tracking with DVB-T signals for positioning. IEEE Trans. Broadcast. 2016, 62, 957–961. [Google Scholar] [CrossRef]
- Chen, L.; Yang, L.L.; Yan, J.; Chen, R. Joint wireless positioning and emitter identification in DVB-T single frequency networks. IEEE Trans. Broadcast. 2017, 63, 577–582. [Google Scholar] [CrossRef] [Green Version]
- Rabinowitz, M.; Spilker, J.J. A new positioning system using television synchronization signals. IEEE Trans. Broadcast. 2005, 51, 51–61. [Google Scholar] [CrossRef]
- Ong, C.; Song, J.; Pan, C.; Li, Y. Technology and standards of digital television terrestrial multimedia broadcasting. IEEE Commun. Mag. 2010, 48, 119–127. [Google Scholar] [CrossRef]
- Dai, L.; Wang, Z.; Pan, C.; Chen, S. Wireless positioning using TDS-OFDM signals in single-frequency networks. IEEE Trans. Broadcast. 2012, 58, 236–246. [Google Scholar] [CrossRef] [Green Version]
- Cong, L.; Wang, H.; Qin, H.; Liu, L. An environmentally-adaptive positioning method based on integration of GPS/DTMB/FM. Sensors 2018, 18, 4292. [Google Scholar] [CrossRef] [Green Version]
- Jiao, Z.; Chen, L.; Lu, X.; Liu, Z.; Zhou, X.; Zhuang, Y.; Guo, G. Carrier phase ranging with DTMB signals for urban pedestrian localization and GNSS aiding. Remote Sens. 2023, 15, 423. [Google Scholar] [CrossRef]
- Liu, X.; Jiao, Z.; Chen, L.; Pan, Y.; Lu, X.; Ruan, Y. An enhanced pedestrian dead reckoning aided with DTMB signals. IEEE Trans. Broadcast. 2022, 68, 407–413. [Google Scholar] [CrossRef]
- GB20600-2006; Frame Structure, Channel Coding and Modulation for a Digital Television Terrestrial Broadcasting System. Standardization Administration of China: Beijing, China, 2007.
- Kim, Y.H.; Lee, J.H. Joint maximum likelihood estimation of carrier and sampling frequency offsets for OFDM systems. IEEE Trans. Broadcast. 2011, 57, 277–283. [Google Scholar]
- Wang, X.; Hu, B. A low-complexity ML estimator for carrier and sampling frequency offsets in OFDM systems. IEEE Commun. Lett. 2014, 18, 503–506. [Google Scholar] [CrossRef]
- Chen, L.; Zhou, X.; Yang, L.L.; Chen, R. Carrier phase ranging for indoor positioning with 5G NR signals. IEEE Internet Things J. 2022, 9, 10908–10919. [Google Scholar] [CrossRef]
- Guerrero-Castellanos, J.F.; Madrigal-Sastre, H.; Durand, S.; Marchand, N.; Guerrero-Sánchez, W.F.; Salmerón, B.B. Design and implementation of an Attitude and Heading Reference System (AHRS). In Proceedings of the 2011 8th International Conference on Electrical Engineering, Computing Science and Automatic Control, IEEE, Merida City, Mexico, 26–28 October 2011; pp. 1–5. [Google Scholar]
- Yao, Y.; Pan, L.; Fen, W.; Xu, X.; Liang, X.; Xu, X. A robust step detection and stride length estimation for pedestrian dead reckoning using a smartphone. IEEE Sens. J. 2020, 20, 9685–9697. [Google Scholar] [CrossRef]
- Kuusniemi, H.; Chen, L.; Ruotsalainen, L.; Pei, L.; Chen, Y.; Chen, R. Multi-sensor multi-network seamless positioning with visual aiding. In Proceedings of the 2011 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 29–30 June 2011; pp. 146–151. [Google Scholar]
- Chen, J.; Ou, G.; Peng, A.; Zheng, L.; Shi, J. A hybrid dead reckon system based on 3-dimensional dynamic time warping. Electronics 2019, 8, 185. [Google Scholar] [CrossRef] [Green Version]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Chen, L.; Jiao, Z.; Lu, X. Robust Pedestrian Dead Reckoning Integrating Magnetic Field Signals and Digital Terrestrial Multimedia Broadcasting Signals. Remote Sens. 2023, 15, 3229. https://doi.org/10.3390/rs15133229
Liu X, Chen L, Jiao Z, Lu X. Robust Pedestrian Dead Reckoning Integrating Magnetic Field Signals and Digital Terrestrial Multimedia Broadcasting Signals. Remote Sensing. 2023; 15(13):3229. https://doi.org/10.3390/rs15133229
Chicago/Turabian StyleLiu, Xiaoyan, Liang Chen, Zhenhang Jiao, and Xiangchen Lu. 2023. "Robust Pedestrian Dead Reckoning Integrating Magnetic Field Signals and Digital Terrestrial Multimedia Broadcasting Signals" Remote Sensing 15, no. 13: 3229. https://doi.org/10.3390/rs15133229