
Prediction Aerospace Software to Detect Solar Activity and the Fast Tracking of Solar Activity Using Remote Sensing Instruments in Orbit

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
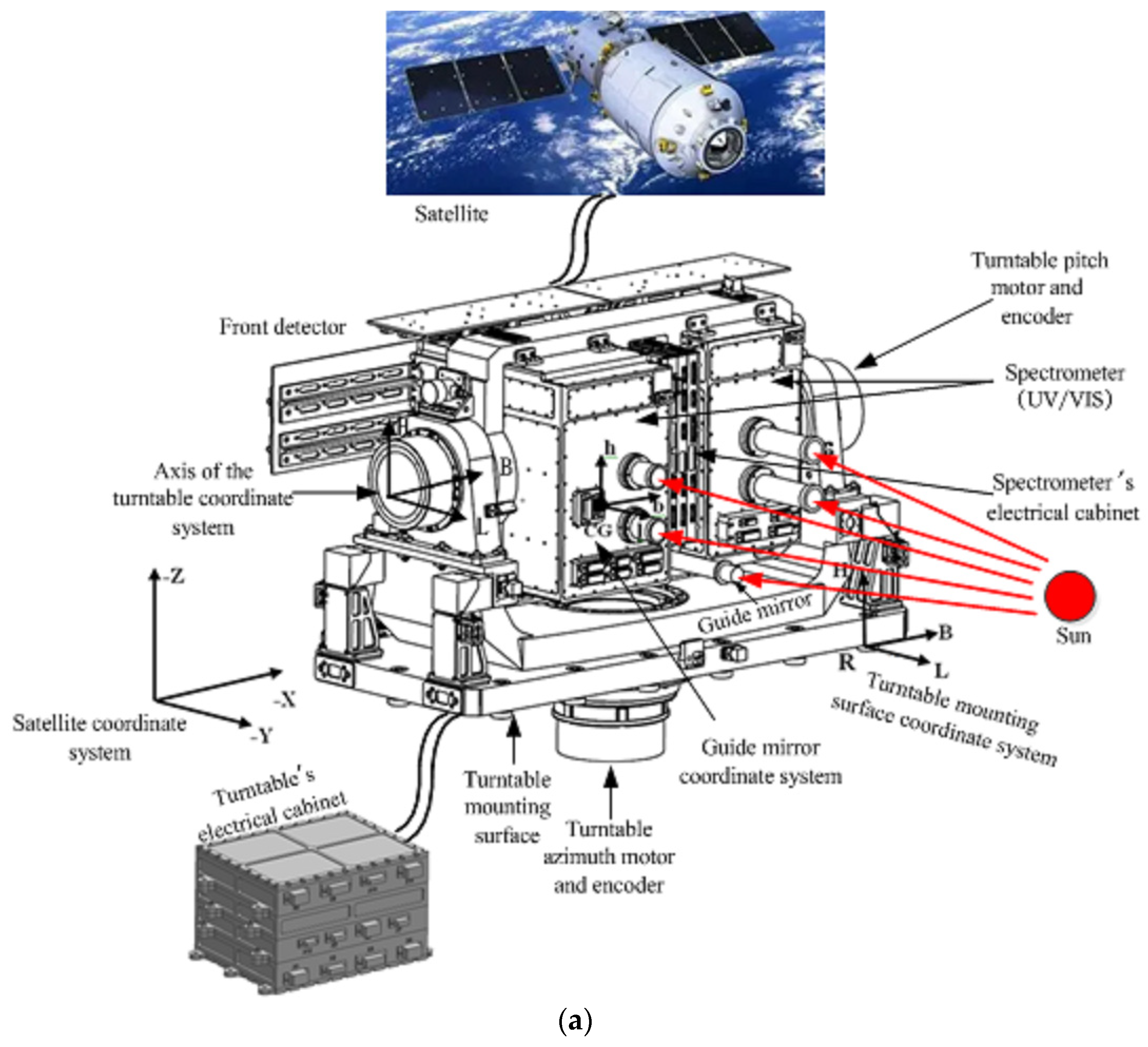
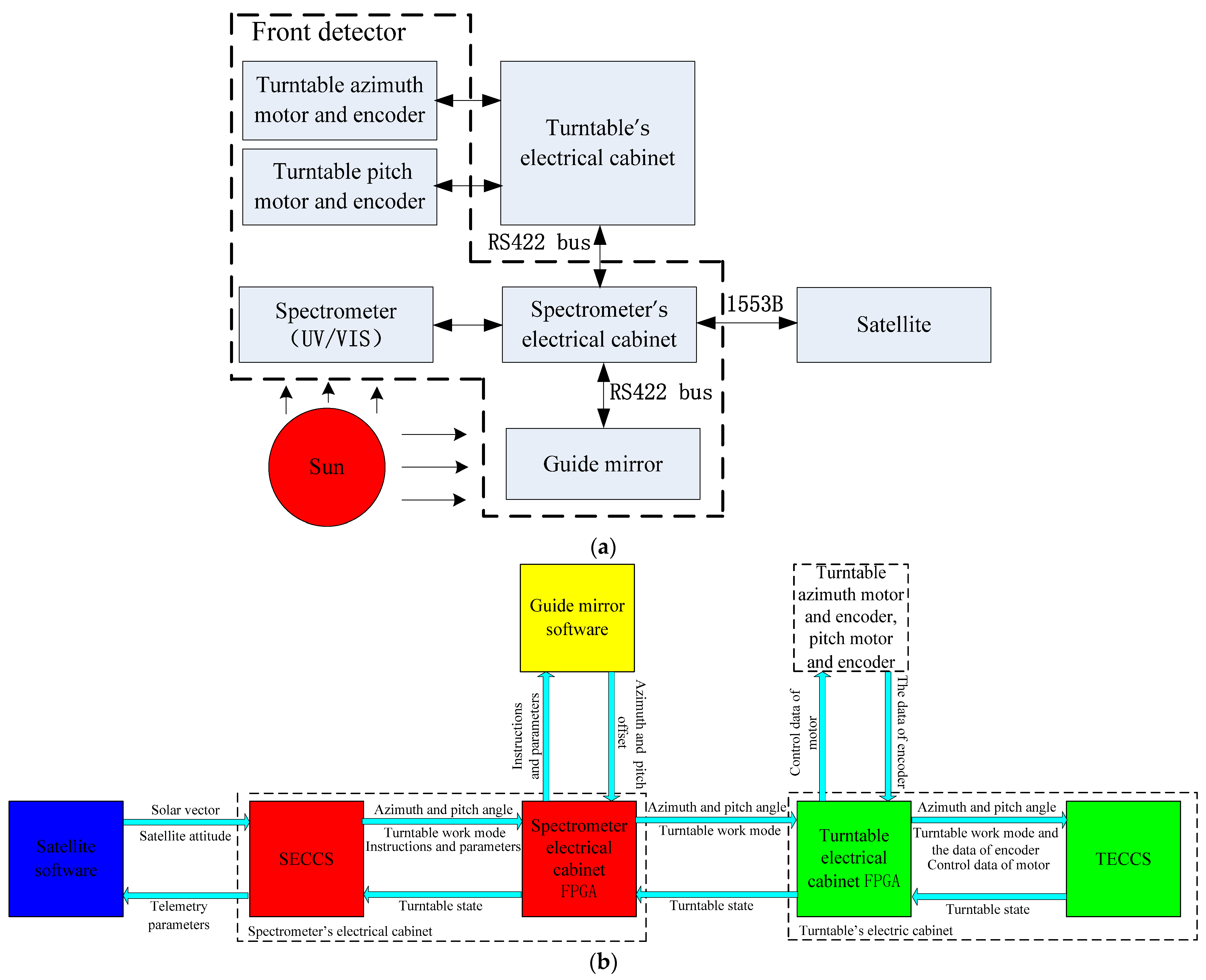
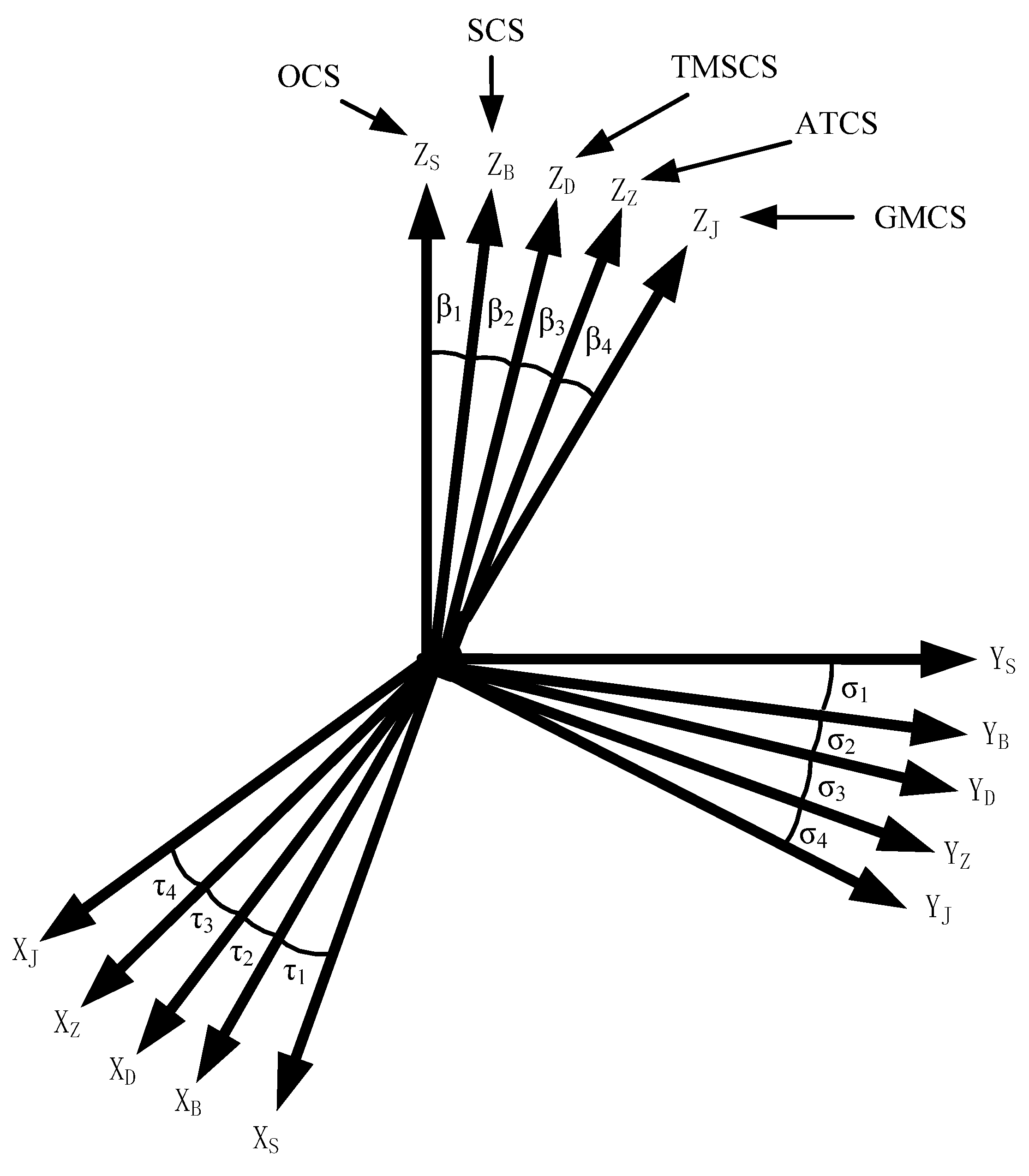
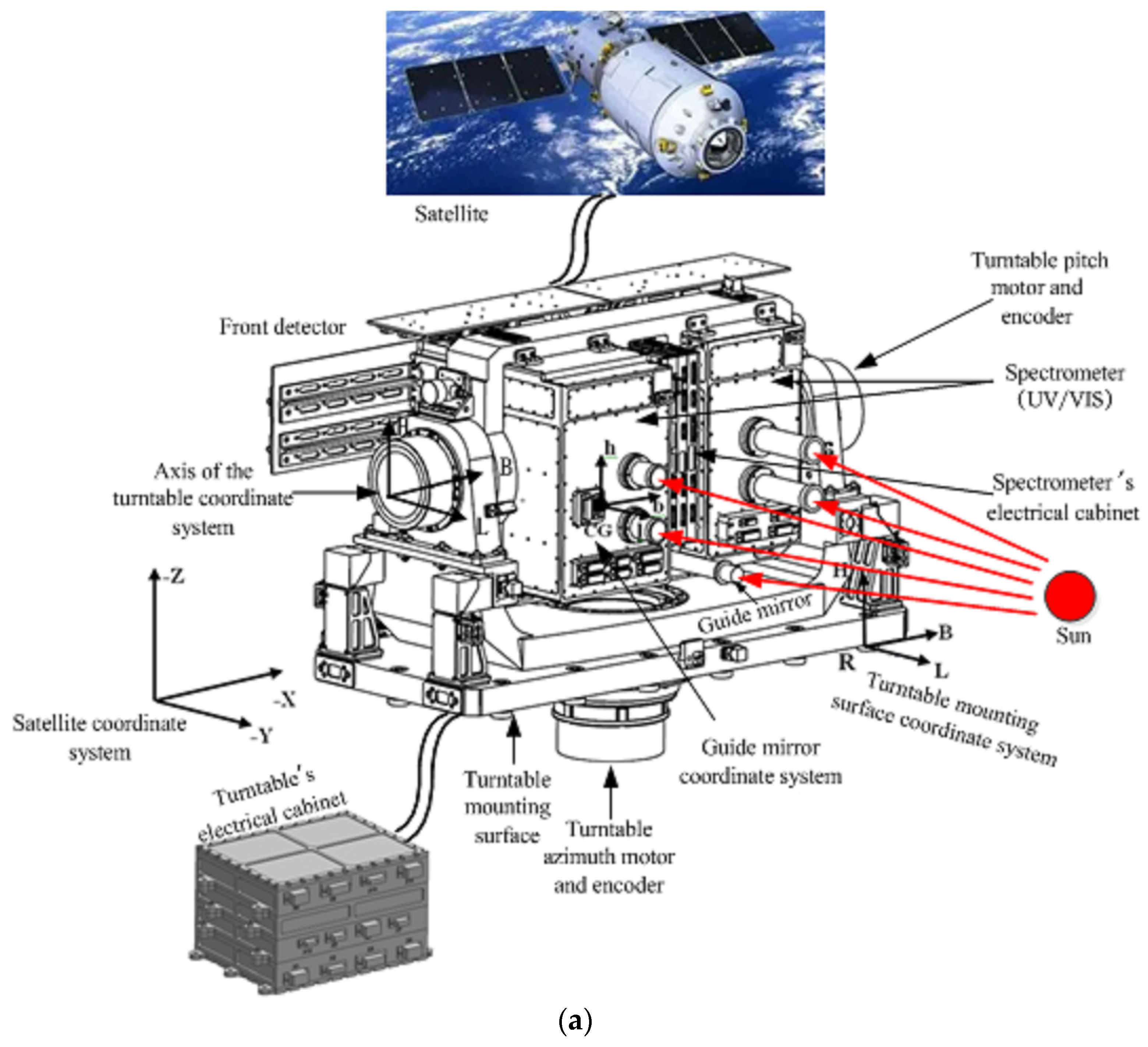
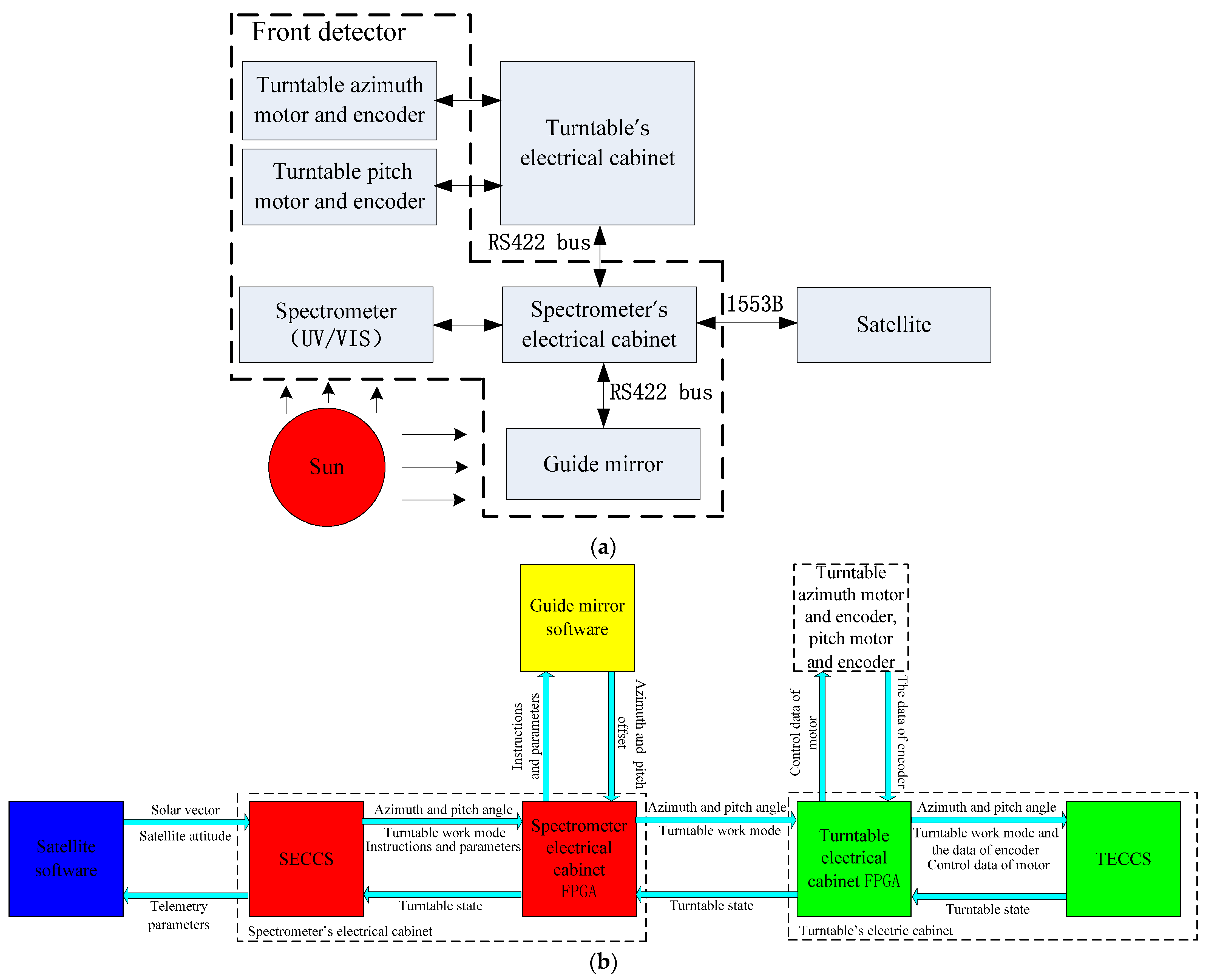
2.1. The Solar Tracking Principle of the Spectrometer
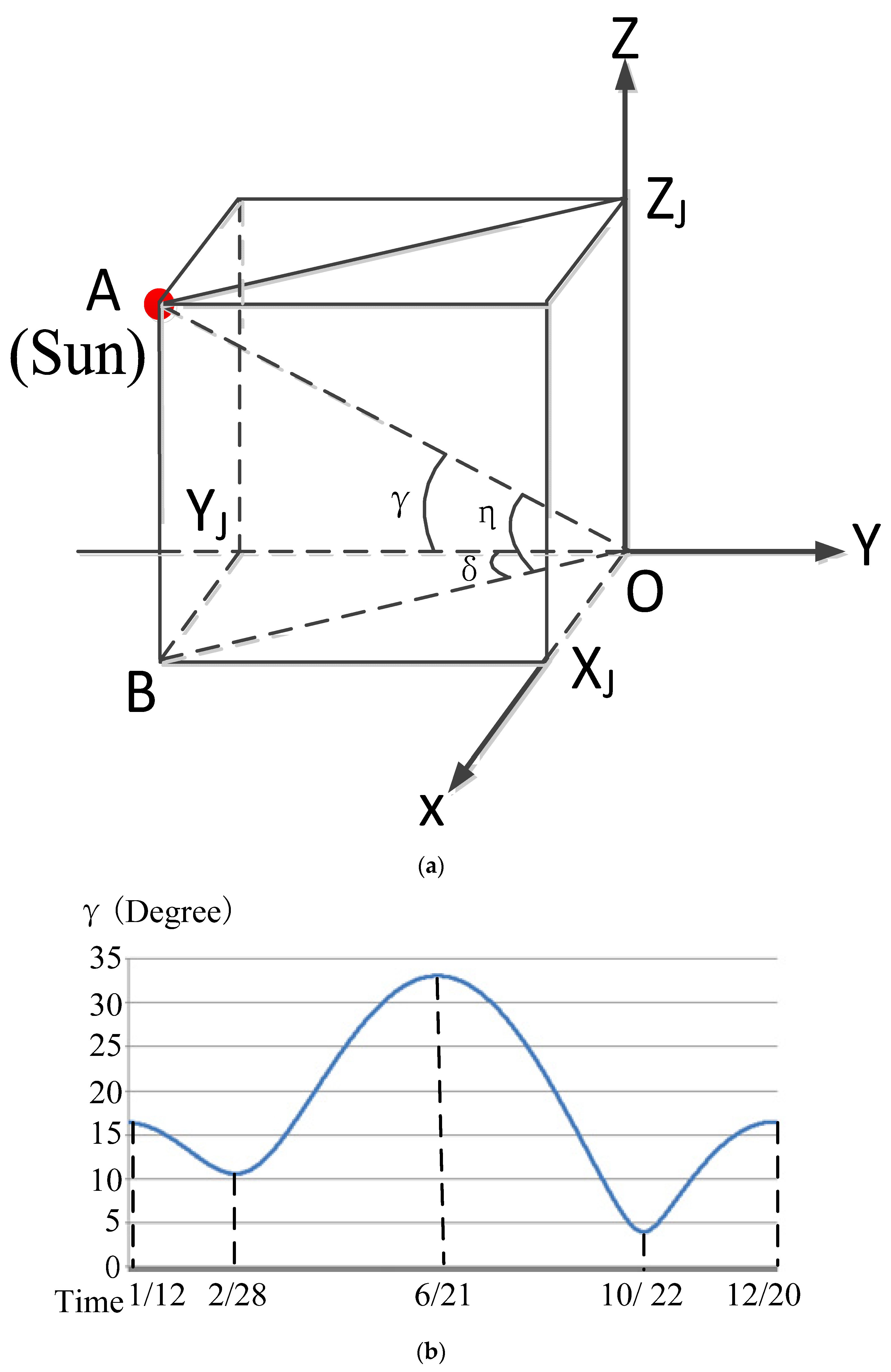
2.2. The Method of Orbit Prediction to Detect Solar Radiation
2.3. Fast-Tracking Solar Method
- (1)
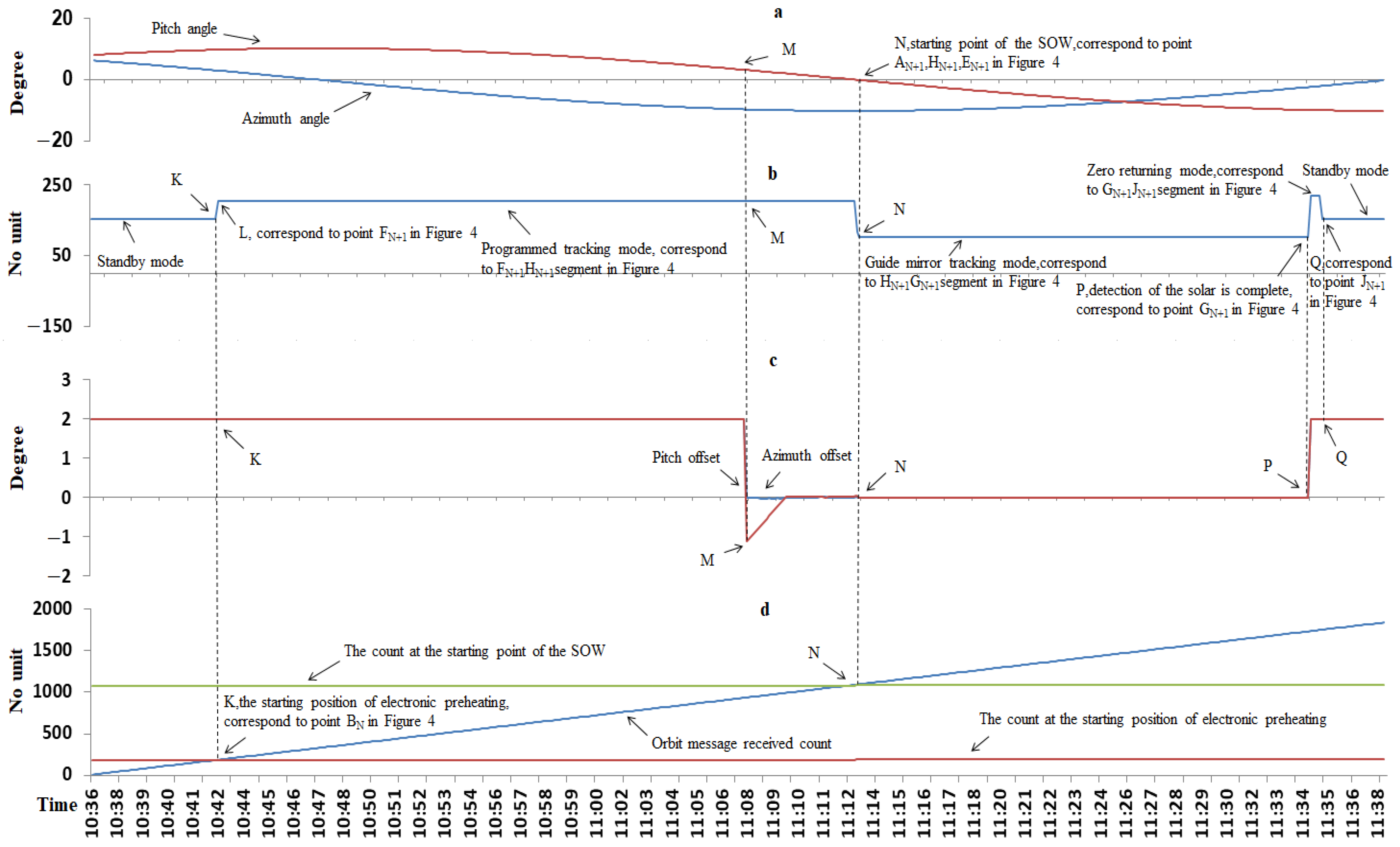
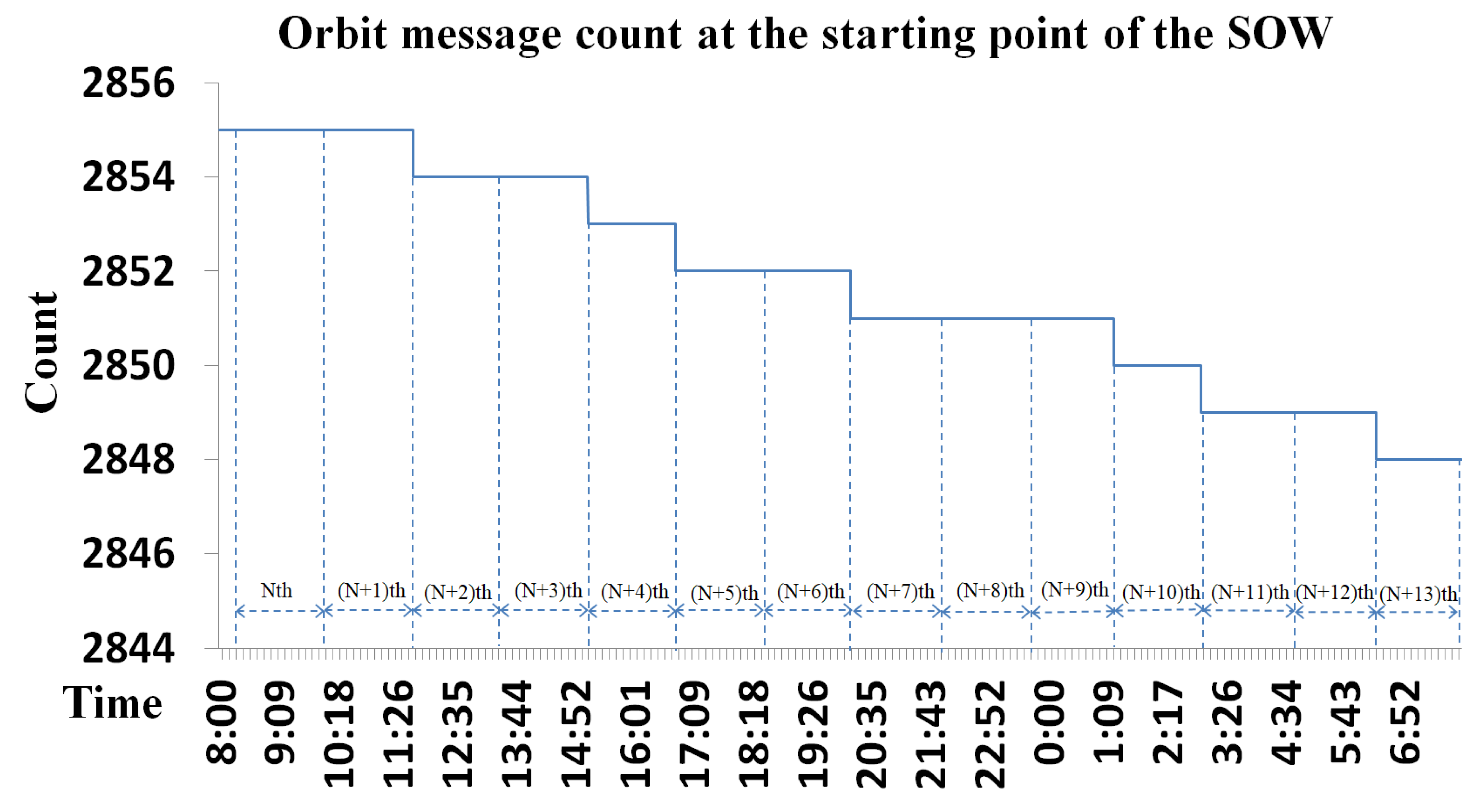
- According to the orbit prediction function, the BN point of the Nth orbit is taken as the starting time of the spectrometer electronics preheating of the (N + 1)th orbit;
- (2)
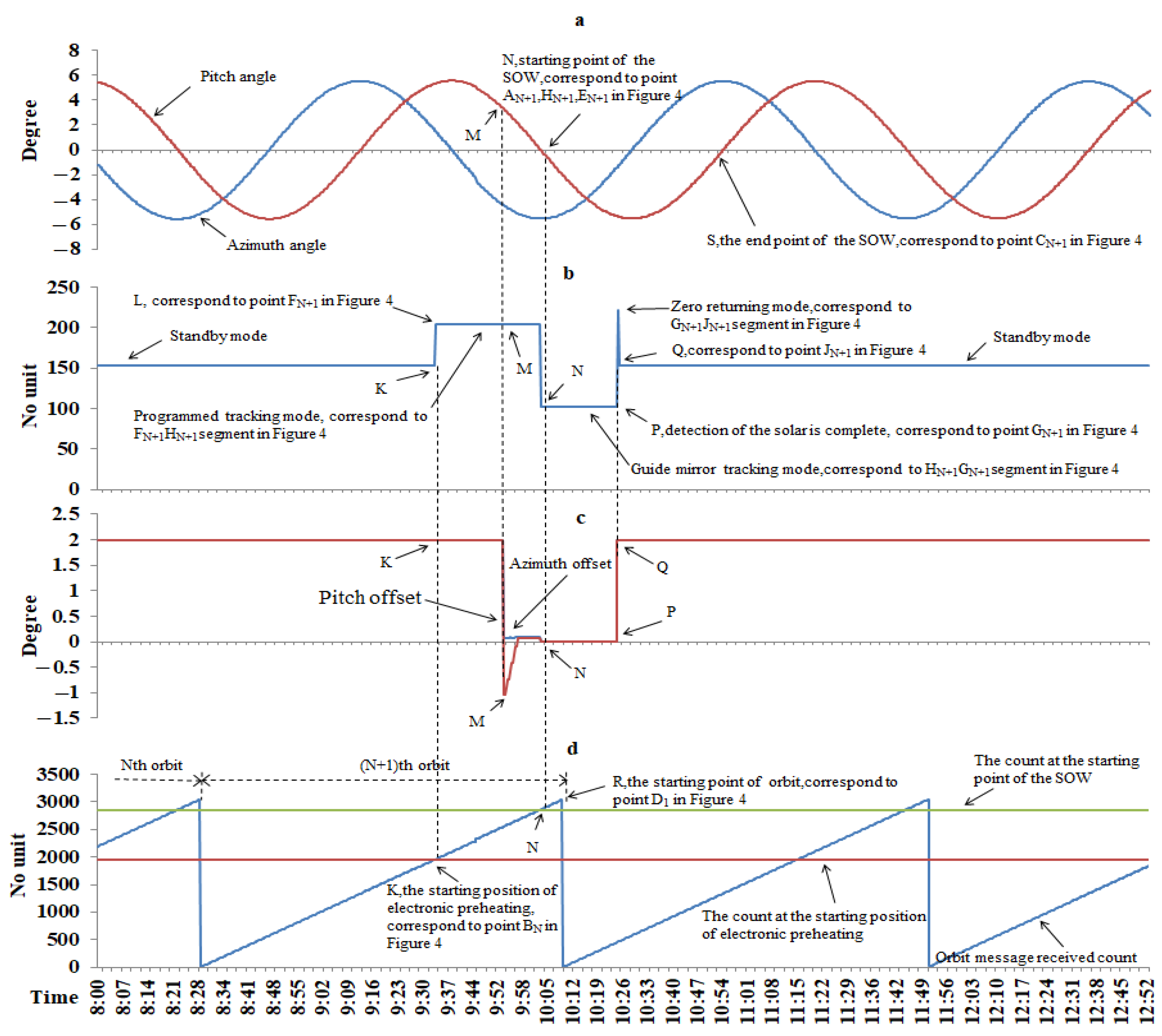
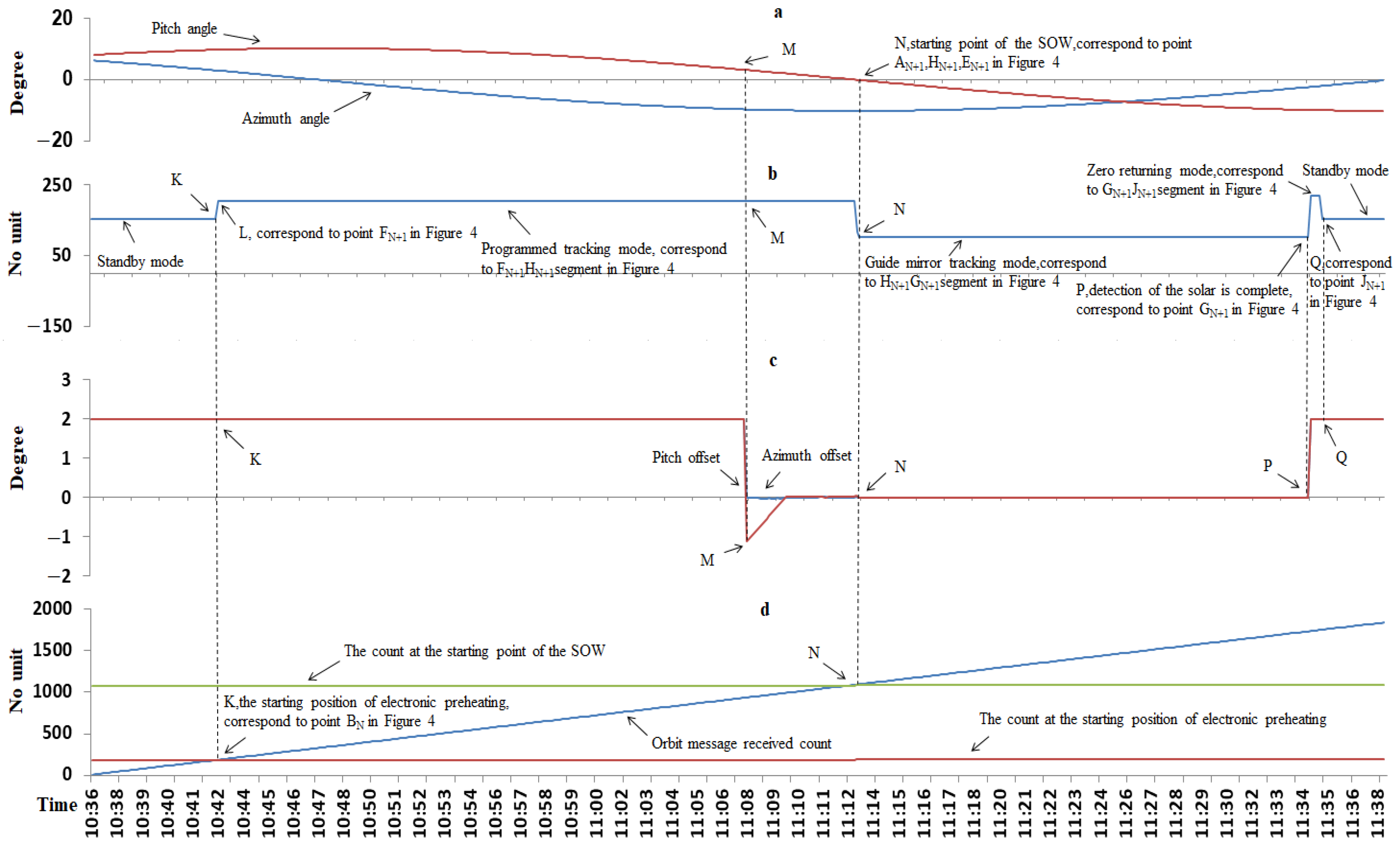
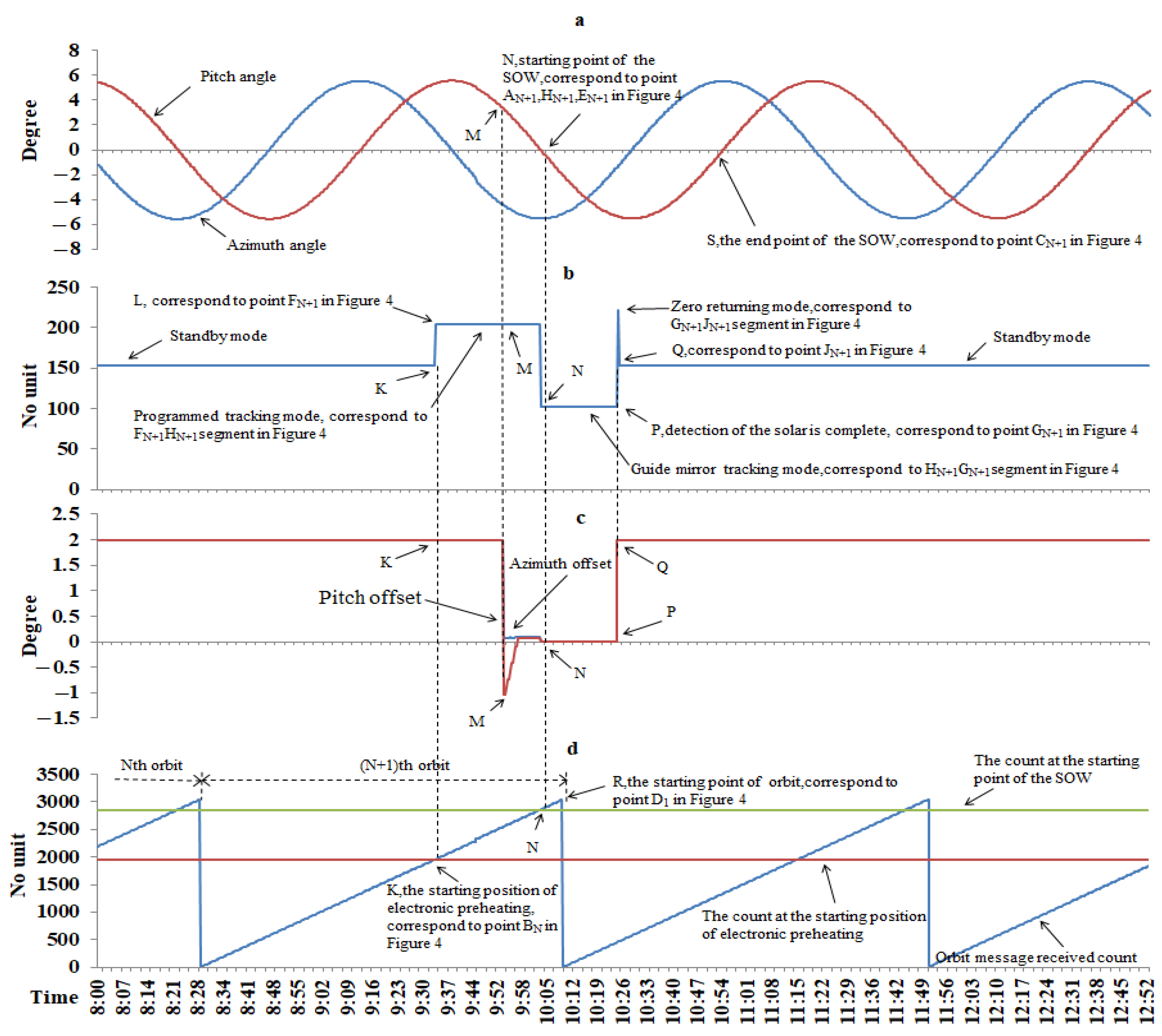
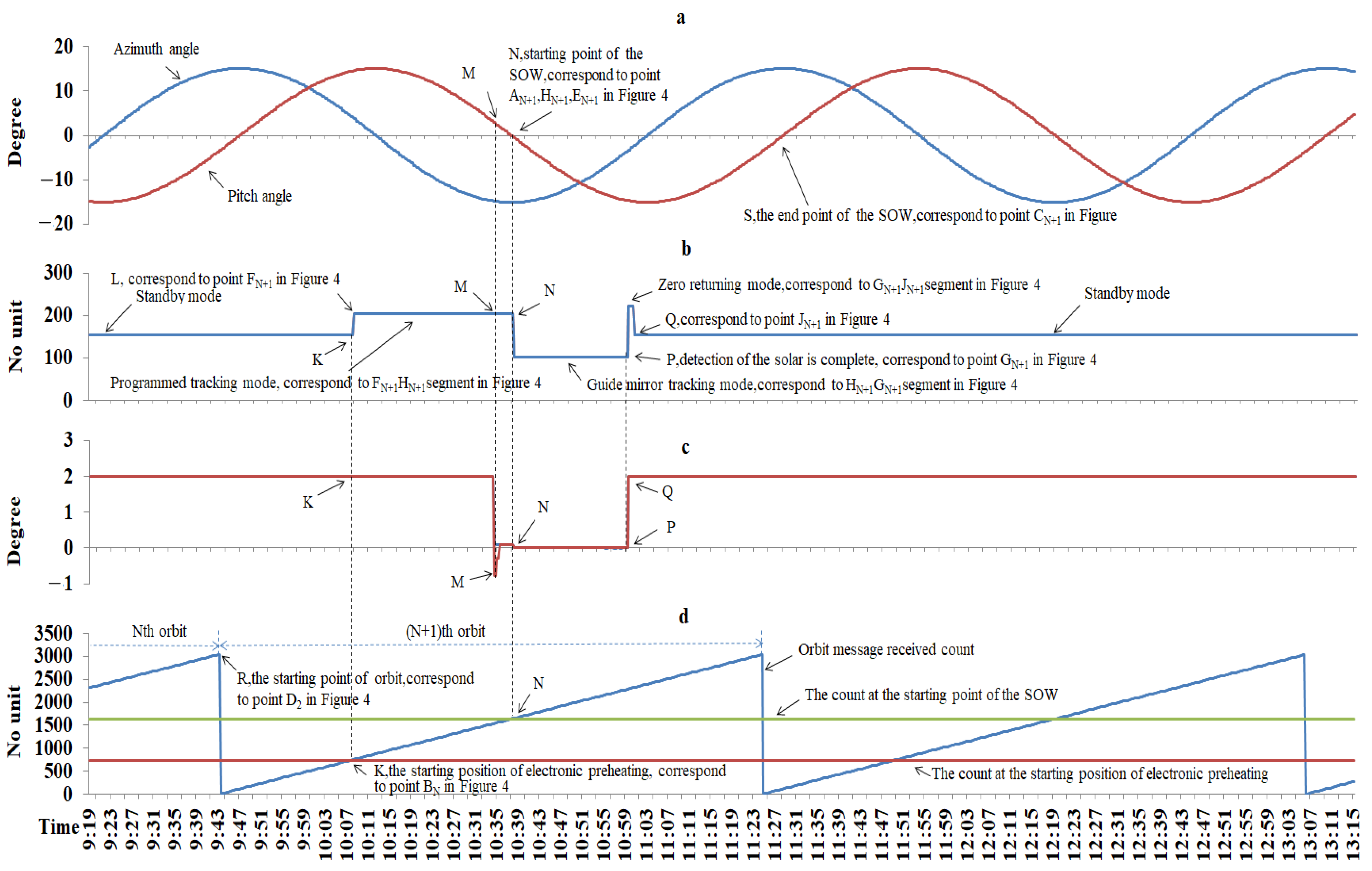
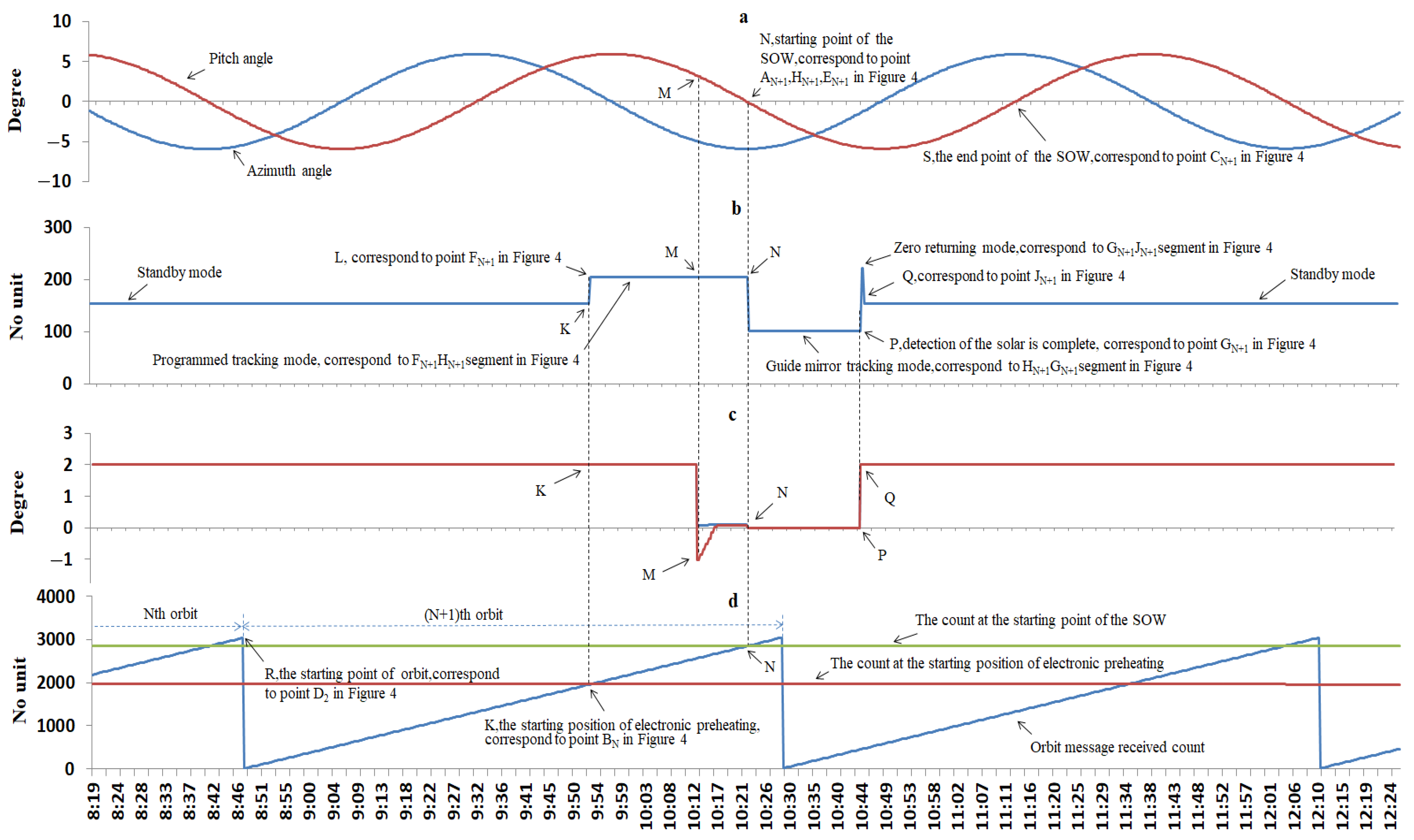
- The preparation stage of the TECCS is approximately 3 s. In this stage, the electrical cabinet completes the software (The version number is 2.04) loading action from the standby state, corresponding to the BNFN+1 section in Figure 4;
- (3)
- After the TECCS is ready for tracking, the SECCS controls it to enter the programmed tracking mode for solar pre-pointing, corresponding to the FN+1AN+1 segment in Figure 4. At this time, the sunlight is outside the rotation range of the turntable. The TECCS controls the rotation of the turntable according to the received azimuth and pitch angles and uses the azimuth and pitch encoder angles to make a closed-loop control. At this time, no matter the relationship between the solar angle received by the TECCS and the angle quantity of the corresponding encoder, the SECCS does not switch the mode of the turntable. When the azimuth and pitch angles calculated by the SECCS are greater than or equal to the maximum rotation angle in the corresponding direction of the turntable, the extreme value of the rotation angle in the corresponding direction of the turntable is sent to the TECCS. At least one direction of the turntable azimuth and pitch waits for the sunlight to enter the turntable rotation range at the extreme range position. Compared with the turntable waiting for the sunlight to enter the field of view at the zero position, this mode realizes the purpose of rapid capture and tracking;
- (4)
- When the sunlight starts to enter the rotation range of the turntable (corresponding to the AN+1 point in Figure 4), the SECCS enters the programmed tracking mode to capture it. The TECCS still controls the rotation of the turntable according to the received azimuth angle and pitch angle and uses the azimuth and pitch encoder angles to make a closed-loop control. When the difference between the solar angle received by the TECCS and the corresponding encoder angle is less than 0.1° (corresponding to the HN+1 point in Figure 4), the programmed tracking mode is successful. The SECCS switches the operating mode of the turntable to the guide mirror tracking mode. As sunlight is at the edge of the rotating range of the turntable, the field of view of the guide mirror is a circular field with a radius of 1°. According to the error chain analysis of the SECCS, the sunlight enters the field of view of the guide mirror. This period corresponds to the AN+1HN+1 section in Figure 4;
- (5)
- In the guide mirror tracking mode, the TECCS controls the turntable azimuth and pitch motor rotation for closed-loop tracking according to the guide mirror offset. When the guide mirror azimuth and pitch offset are less than 0.1° (corresponding to the EN+1 point in Figure 4), the guide mirror tracking mode is successful;
- (6)
- When the guide mirror tracking mode is successful, the spectrometer starts to detect sunlight until the end of detection. This period corresponds to the EN+1GN+1 segment in Figure 4;
- (7)
- When the detection of sunlight is complete, the SECCS controls the turntable to return it to the zero position and enter it into the standby state. This period corresponds to the GN+1JN+1 section in Figure 4.

3. Results
4. Discussion
- Determining the preheating time of the hardware: This aspect should be thoroughly researched by examining different preheating durations on the ground, which can provide valuable insights for optimizing the process.
- Identifying optical components that contribute to the stability of the optic system: An investigation involving experts in optical design can identify and characterize specific components that significantly influence the stability of the optic system.
- Designing the guide mirror with a larger field of view: It was designed as a circular field with a radius of more than 1°, such as 60°. The solar data can be captured when the spectrometer is in orbit, which can simplify the control process of the turntable.
- Designing the turntable with a larger rotation range, such as with azimuth and pitch directions of ±35°: This aspect should make the SOW as long as the orbital period, which meets the conditions for tracking and detecting the Sun in the whole orbit.
- The results obtained on the ground (Equation (6)) and in orbit (Equation (7)) cannot be adequately supported solely by simulating solar tracking data on the ground and solar tracking and detection in orbit due to the difference in the telemetry parameters’ timing between the two scenarios (8 s on the ground versus 32 s in orbit).
- The results of the solar tracking simulation on the ground may not align perfectly with the MN section angle values of the curve (c) depicted in Figure 11, Figure 12 and Figure 13. This discrepancy can be attributed to the influence of the two-dimensional turntable’s balance on the ground, which differs from its weightless state in orbit.
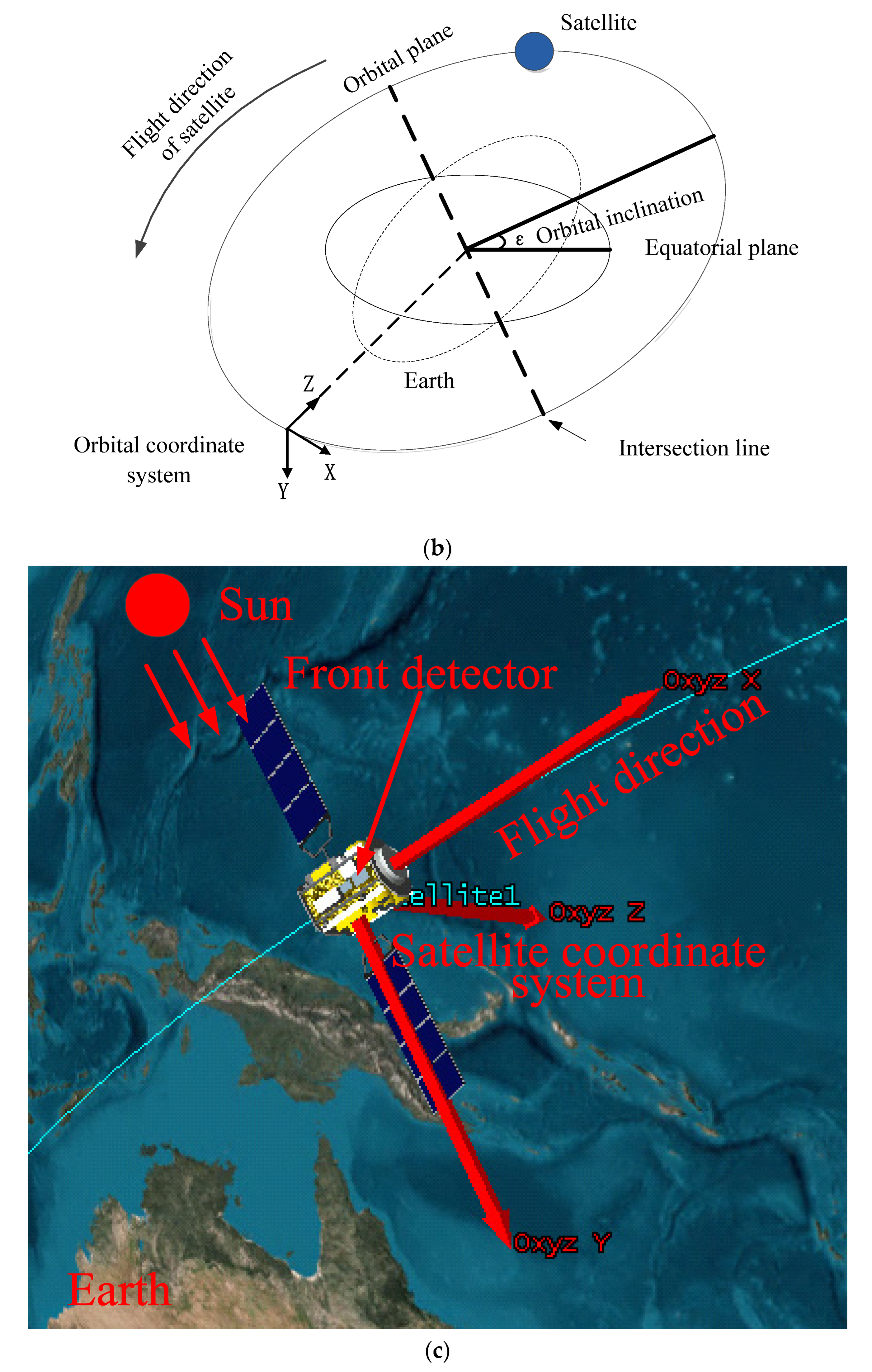
- The orbit prediction function of Aerospace Software is suitable for a Sun-synchronous orbit with any orbital inclination, but whether it is suitable for all kinds of orbits needs to be determined.
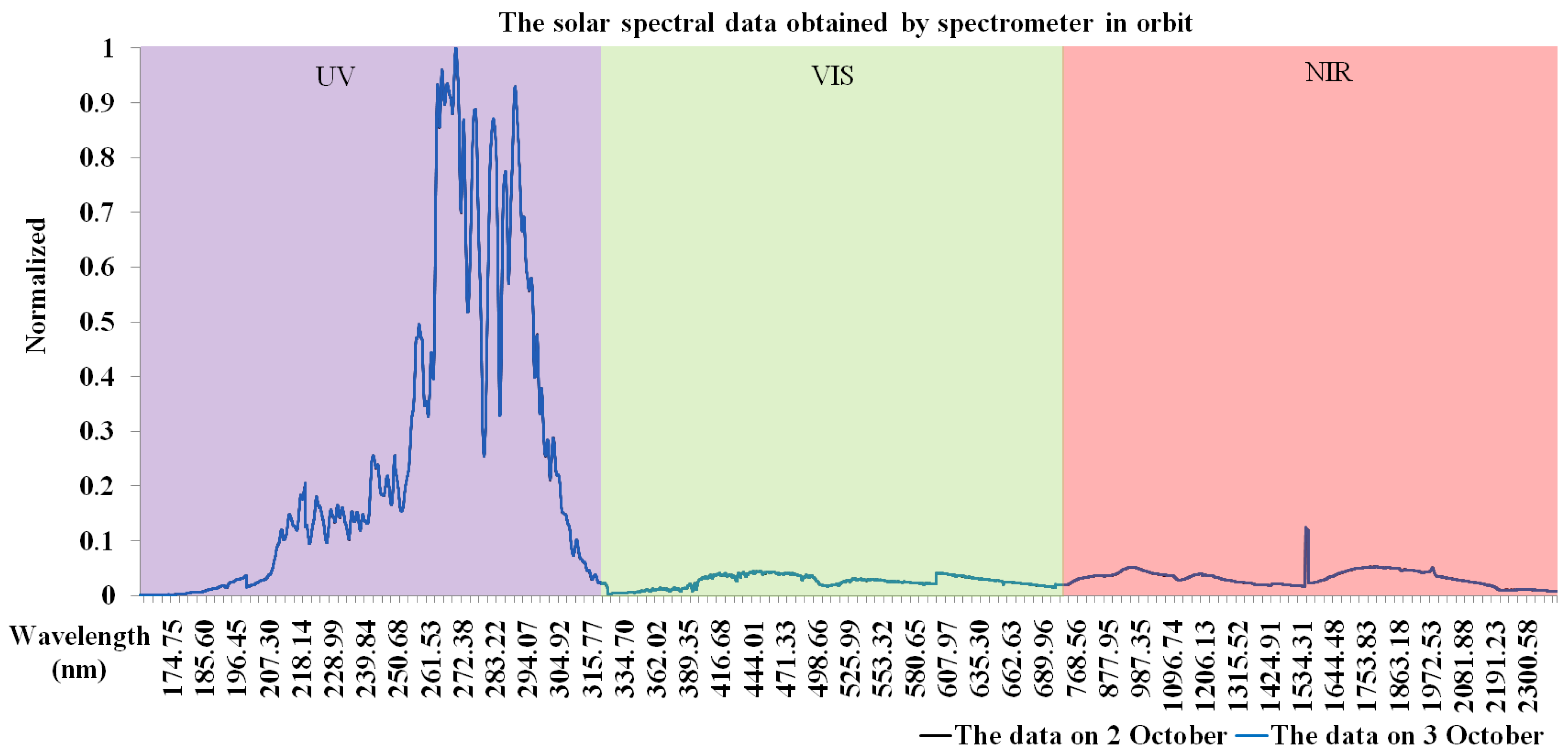
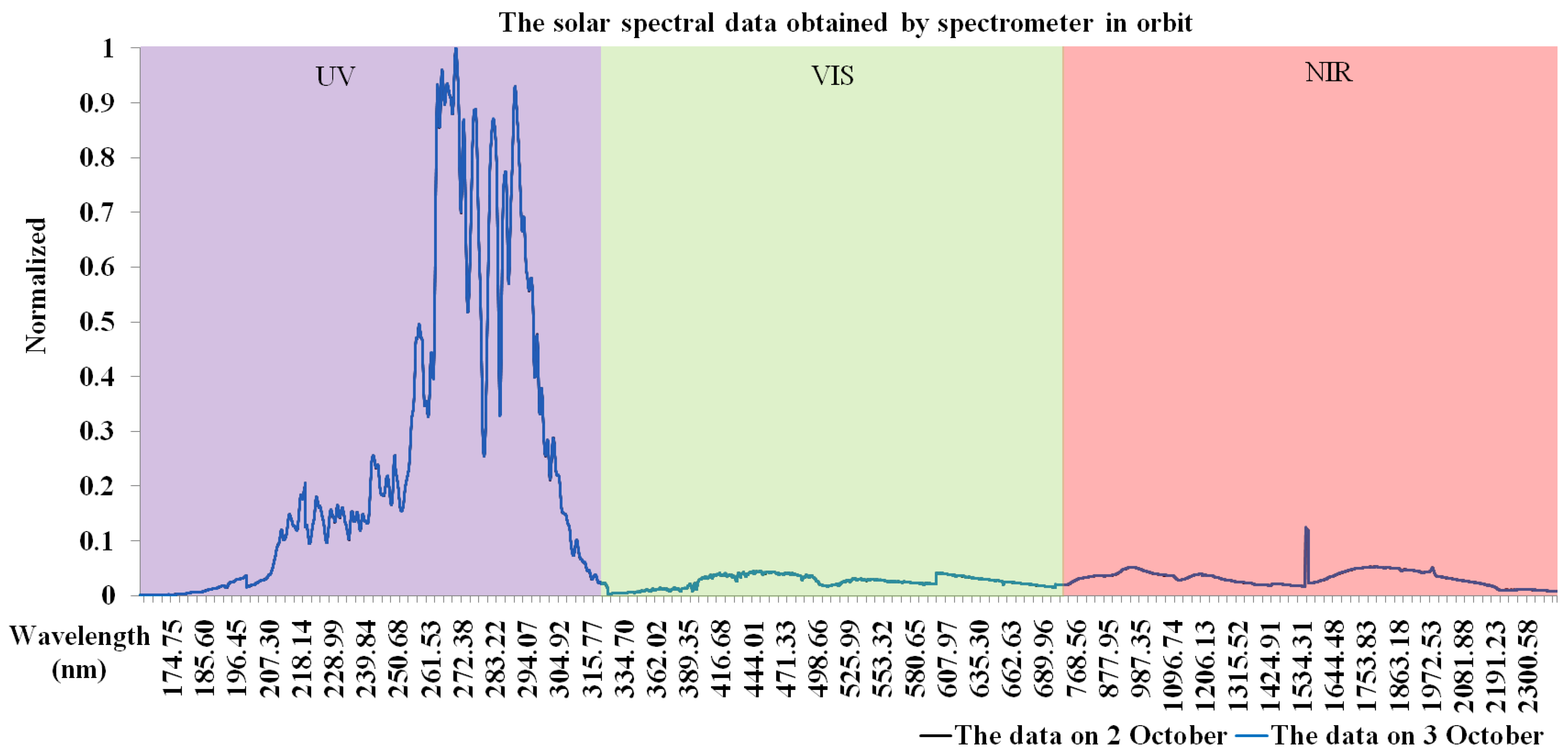
- The solar remote sensing data should be compared with other international spectrometers to verify the accuracy of the measurement results.
5. Conclusions
- The fast-tracking solar method was effective according to Equations (6) and (7);
6. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ding, Y.H. Effect of Solar Activity on Earth’s Climate and Weather. Meteorol. Mon. 2019, 45, 297–304. [Google Scholar]
- Kagata, H.; Yamamura, K. Special Feature: Global Climate Change and the Dynamics of Biological Communities—Preface. Popul. Ecol. 2006, 48, 3–4. [Google Scholar] [CrossRef]
- Lin, W.; Lu, E. Annual and Seasonal Global Solar-Radiation Climates in YunNan, China. Energy Convers. Manag. 1992, 33, 1021–1029. [Google Scholar]
- Yilmaz, E. A Systematic Study on the Monthly Mean Global Solar Radiation between Latitudes 65S and 65N. Energy Sources Part A Recovery Util. Environ. Eff. 2011, 33, 434–439. [Google Scholar] [CrossRef]
- Ricke, K.; Morgan, G.; Allen, M. Regional Climate Response to Solar-radiation Management. Nat. Geosci. 2010, 3, 537–541. [Google Scholar] [CrossRef]
- Wen, G.; Cahalan, R.; Rind, D.; Jonas, J.; Pilewskie, P.; Harder, J. Spectral Solar UV Radiation and Its Variability and Climate Responses. In Proceedings of the International Radiation Symposium on Radiation Processes in the Atmosphere and Ocean (IRS), Berlin, Germany, 6–10 August 2012; Volume 1531, pp. 788–791. [Google Scholar]
- Kambezidis, H. The Solar Radiation Climate of Athens: Variations and Tendencies in the Period 1992–2017, the Brightening Era. Sol. Energy 2018, 173, 328–347. [Google Scholar] [CrossRef]
- Matuszko, D. Long-term Variability in Solar Radiation in Krakow Based on Measurements of Sunshine Duration. Int. J. Climatol. 2014, 34, 228–234. [Google Scholar] [CrossRef]
- Pasini, A.; Triacca, U.; Attanasio, A. Evidence of Recent Causal Decoupling between Solar Radiation and Global Temperature. Environ. Res. Lett. 2012, 7, 034020. [Google Scholar] [CrossRef]
- Madhlopa, A. Solar Radiation Climate in Malawi. Sol. Energy 2006, 80, 1055–1057. [Google Scholar] [CrossRef]
- Mitchell, J.; Nolfo, G.; Hill, M.; Christian, E.; McComas, D.; Schwadron, N.; Wiedenbeck, M.; Bale, S.; Case, A.; Cohen, C.; et al. Small Electron Events Observed by Parker Solar Probe/ISeIS during Encounter 2. Astrophys. J. 2020, 902, 20. [Google Scholar] [CrossRef]
- Zhao, L.L.; Zank, G.; Hu, Q.; Telloni, D.; Chen, Y.; Adhikari, L.; Nakanotani, M.; Kasper, J.; Huang, J.; Bale, S.; et al. Detection of small magnetic flux ropes from the third and fourth Parker Solar Probe encounters. Astron. Astrophys. 2021, 650, A12. [Google Scholar] [CrossRef]
- Sakshee, S.; Riddhi, B.; Supratik, B. MHD-scale anisotropy in solar wind turbulence near the Sun using Parker solar probe data. Mon. Not. R. Astron. Soc. 2022, 514, 1282–1288. [Google Scholar] [CrossRef]
- Sebastian, A.; Acedo, L.; Morano, J. An orbital model for the Parker Solar Probe mission: Classical vs relativistic effects. Adv. Space Res. 2022, 70, 842–853. [Google Scholar] [CrossRef]
- Alberti, T.; Benella, S.; Benzi, R. Reconciling Parker Solar Probe Observations and Magnetohydrodynamic Theory. Astrophys. J. Lett. 2022, 940, 1. [Google Scholar] [CrossRef]
- Raouafifi, N.; Matteini, L.; Squire, J.; Badman, S.; Velli, M.; Klein, K.; Chen, C.; Matthaeu, W.; Szabo, A.; Linton, M.; et al. Parker Solar Probe: Four Years of Discoveries at Solar Cycle Minimum. Space Sci. Rev. 2023, 219, 8. [Google Scholar] [CrossRef]
- Thuillier, G.; Frohlich, C.; Schmidtke, G. Spectral and total solar irradiance measurements on board the International Space Station. In Proceedings of the 2nd European Symposium on Utilisation of the International Space Station, Noordwijk, The Netherlands, 16–18 November 1998; Volume 433, pp. 605–611. [Google Scholar]
- Schmidtke, G.; Frohlich, C.; Thuillier, G. ISS-SOLAR: Total (TSI) and Spectral (SSI) Irradiance Measurements. Adv. Space Res. 2006, 37, 255–264. [Google Scholar] [CrossRef]
- Thuillier, G.; Foujols, T.; Bolsee, D.; Gillotay, D.; Herse, M.; Peetermans, W.; Decuyper, W.; Mandel, H.; Sperfeld, P.; Pape, S. SOLAR/SOLSPEC: Scientific Objectives, Instrument Performance and Its Absolute Calibration Using a Blackbody as Primary Standard Source. Sol. Phys. 2009, 257, 185–213. [Google Scholar] [CrossRef]
- Weber, M. Comment on the Article by Thuillier et al. “The Infrared Solar Spectrum Measured by the SOLSPEC Spectrometer onboard the International Space Station”. Sol. Phys. 2015, 290, 1601–1605. [Google Scholar] [CrossRef]
- Wienhold, F.; Anders, J.; Galuska, B.; Klocke, U.; Knothe, M.; Riedel, W.; Schmidtke, G.; Singler, R.; Ulmer, U.; Wolf, H. The solar package on ISS: SOL-ACES. In Proceedings of the 2nd TIGER Symposia A Program for Thermospheric-Iono Spheric Geospheric Research, St. Petersburg, Russia, 9–10 June 1999; Volume 25, pp. 473–476. [Google Scholar]
- Vourlidas, A. Ly alpha science from the LST aboard the ASO-S mission. Res. Astron. Astrophys. 2019, 19, 11. [Google Scholar] [CrossRef]
- Gan, W.Q. Progress Report on ASO-S. Chin. J. Space Sci. 2022, 42, 565–567. [Google Scholar] [CrossRef]
- Gan, W.Q. Status of the Advanced Space-based Solar Observatory. Chin. J. Space Sci. 2020, 40, 704–706. [Google Scholar]
- Huang, Y.Y.; Ma, T.; Zhang, Y.Q.; Zhang, Y.; Zhang, Z. Calibration of the Detector Units of the Spectrometer of the Hard X-ray Imager Payload Onboard the ASO-S Mission. Acta Astron. Sin. 2020, 61, 42. [Google Scholar]
- Fang, C.; Li, C. Introduction to the Chinese Halpha Solar Explorer (CHASE) Mission. Chin. J. Space Sci. 2022, 42, 546–549. [Google Scholar] [CrossRef]
- Ye, X.; Yi, X.; Lin, C.; Fang, W.; Wang, K.; Xia, Z.; Ji, Z.; Zheng, Y.; Sun, D.; Quan, J. Instrument Development: Chinese Radiometric 122 Benchmark of Reflected Solar Band Based on Space Cryogenic Absolute Radiometer. Remote Sens. 2020, 12, 2856. [Google Scholar] [CrossRef]
- Yang, D.; Fang, W.; Ye, X.; Song, B. High Precision Sun–tracking of Spaceborne Solar Irradiance Monitor. Opt. Precis. Eng. 2014, 22, 2483–2490. [Google Scholar] [CrossRef]
- Li, Z.; Wang, S.; Huang, Y.; Lin, G.; Shao, Y.; Yu, M. High-Precision and Short-Time Solar Forecasting by Spaceborne Solar Irradiance Spectrometer. Acta Opt. Sin. 2019, 39, 1–5. [Google Scholar]
- Shao, Y.; Li, Z.; Yang, X.; Huang, Y.; Li, B.; Lin, G.; Li, J. Methods of Analyzing the Error and Rectifying the Calibration of a Solar Tracking System for High-Precision Solar Tracking in Orbit. Remote Sens. 2023, 15, 2213. [Google Scholar] [CrossRef]
- Liu, G.; Hu, J. Design of Communication Stream for the 1553B Bus. J. Beijing Inst. Technol. 2003, 23, 301–304. [Google Scholar]
- Kanchana, G.; Kumar, M.S. Avionics system network with MIL-STD 1553B bus. J. Inst. Electron. Telecommun. Eng. 1995, 41, 291–295. [Google Scholar] [CrossRef]
- Sabnis, A.; Hotkar, V.; Vanathy, B.; Jacob, A. 1553B Communication Using DSP Based Digital Controller. In Proceedings of the International Conference on Control, Instrumentation, Energy and Communication (CIEC), Kolkata, India, 31 January–2 February 2014; pp. 485–489. [Google Scholar]
- Rao, D.; Raja, A.; Karthikeyan, R.; Pal, K.; Tharun, S.; Priya, B. Design and Implementation of 1553B Bus Controller on FPGA. In Proceedings of the 3rd International Conference on Computing Methodologies and Communication (ICCMC), Erode, India, 27–29 March 2019; IEEE: New York, NY, USA, 2019; pp. 418–421. [Google Scholar]
- Burgess, R. RS422 and Beyond. Electron. Eng. 1981, 53, 81. [Google Scholar]
- Zhang, Y.; Cheng, J.; Su, J.; Zheng, L.; Qiu, X.; Shang, W. Time-domain resonant characteristics between the disturbances and the 129 RS422 communication signals in Tesla pulse driver, and analysis on the caused RS422 communication interference. IET Sci. Meas. Technol. 2020, 14, 905–913. [Google Scholar] [CrossRef]
- Shi, L.; Guo, B. RS485/422 Solution in Embedded Access Control System. In Proceedings of the 2nd International Conference on Biomedical Engineering and Informatics (BMEI), Tianjin, China, 17–19 October 2009; pp. 2094–2097. [Google Scholar]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shao, Y.; Yang, X.; Li, Z.; Huang, Y.; Li, B.; Lin, G.; Guo, X.; Li, J. Prediction Aerospace Software to Detect Solar Activity and the Fast Tracking of Solar Activity Using Remote Sensing Instruments in Orbit. Remote Sens. 2023, 15, 3288. https://doi.org/10.3390/rs15133288
Shao Y, Yang X, Li Z, Huang Y, Li B, Lin G, Guo X, Li J. Prediction Aerospace Software to Detect Solar Activity and the Fast Tracking of Solar Activity Using Remote Sensing Instruments in Orbit. Remote Sensing. 2023; 15(13):3288. https://doi.org/10.3390/rs15133288
Chicago/Turabian StyleShao, Yingqiu, Xiaohu Yang, Zhanfeng Li, Yu Huang, Bo Li, Guanyu Lin, Xu Guo, and Jifeng Li. 2023. "Prediction Aerospace Software to Detect Solar Activity and the Fast Tracking of Solar Activity Using Remote Sensing Instruments in Orbit" Remote Sensing 15, no. 13: 3288. https://doi.org/10.3390/rs15133288
APA StyleShao, Y., Yang, X., Li, Z., Huang, Y., Li, B., Lin, G., Guo, X., & Li, J. (2023). Prediction Aerospace Software to Detect Solar Activity and the Fast Tracking of Solar Activity Using Remote Sensing Instruments in Orbit. Remote Sensing, 15(13), 3288. https://doi.org/10.3390/rs15133288