
Towards a Guideline for UAV-Based Data Acquisition for Geomorphic Applications


Abstract
:1. Introduction
2. Study Sites, Instruments, and Datasets
3. Approach and Methodology
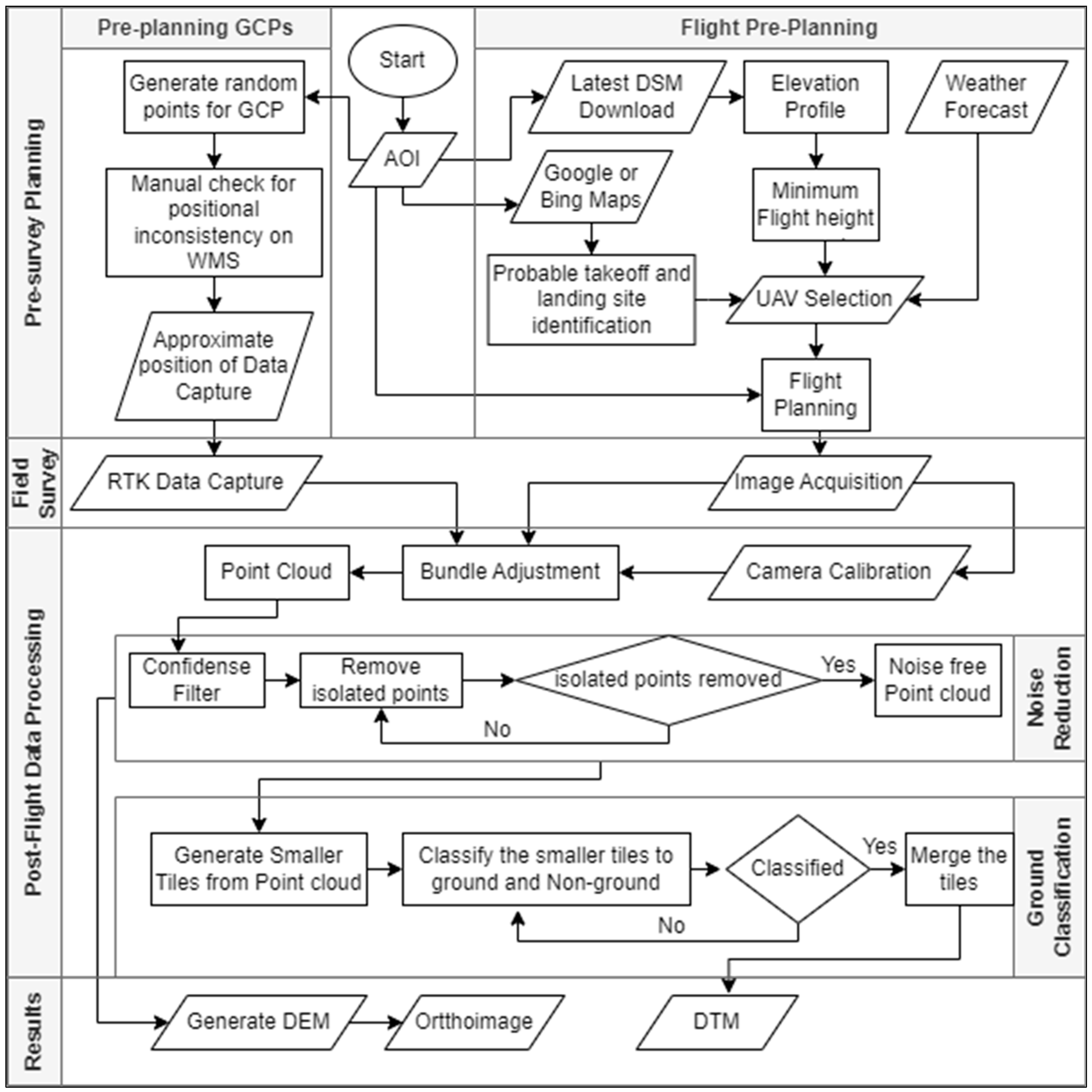
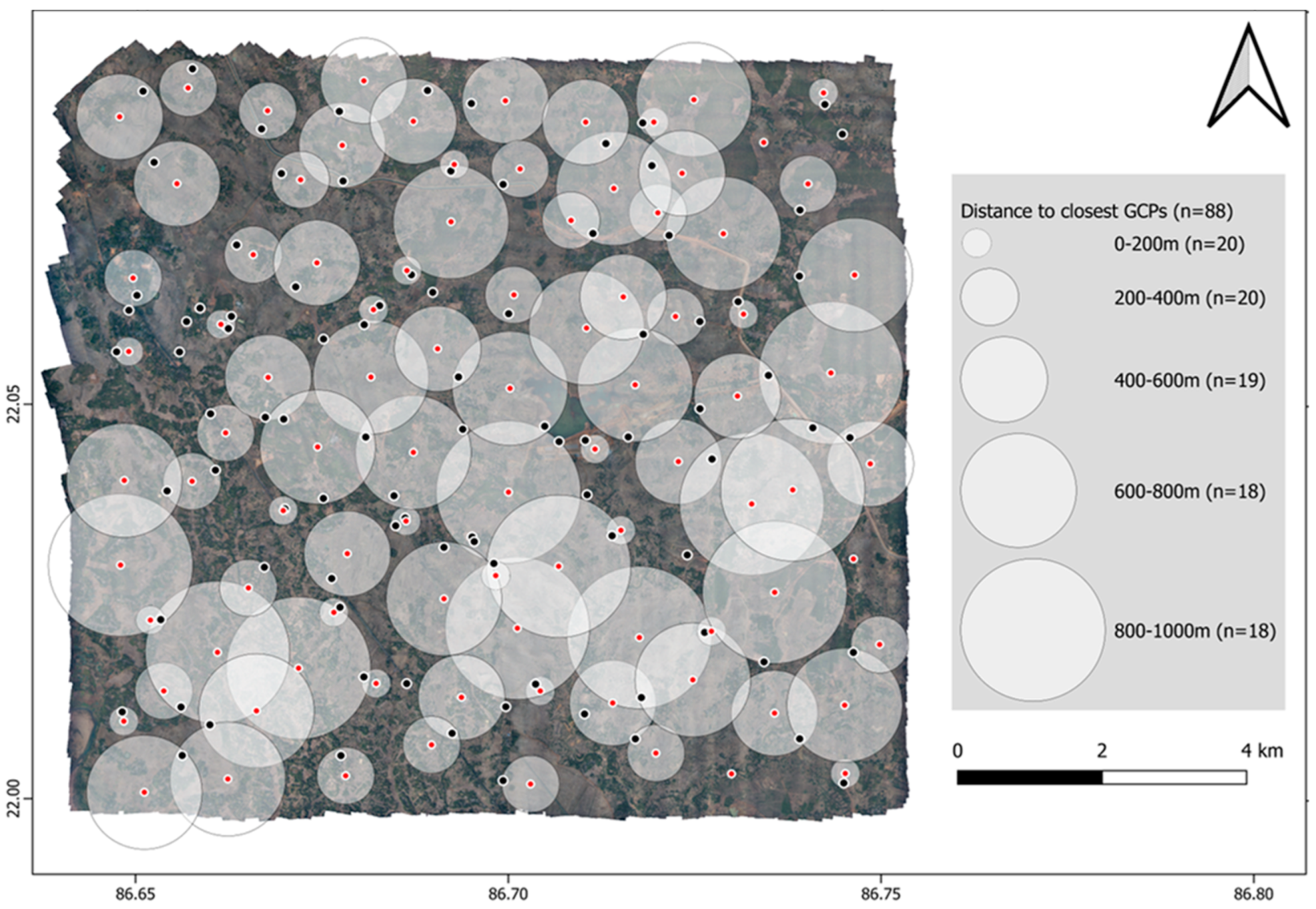
3.1. Pre-Flight Planning (Including UAV Selection and GCP Collection Strategy)
3.2. DGPS Survey and UAV Flights
3.3. Post-Flight Image Processing
3.3.1. Camera (Lens) Calibration
- Case 1: The camera’s intrinsic parameters were generated from 40 images of a calibration board (On-screen board in AMP) from different angles. We used a flat-screen IPS (In-Plane Switching) display with 178 degrees of viewing angle for calibration. The derived model was used as a starting point and was optimized during the bundle adjustment stage. No GCPs were used. This camera model was used for processing all images.
- Case 2: The camera intrinsic parameters were determined separately for each flight during bundle adjustment within AMP. We did not use any pre-calibrated values as starting points. We first grouped all images as per flight and then performed bundle adjustments for each group of images (group 1: 1029 images, group 2: 1146 images, and group 3: 1153 images) without GCPs, producing individual lens models for each flight. The image groups were merged (remember—lens models were not merged), and all 12 GCPs were placed, followed by another bundle adjustment.
- Case 3: All images were processed together (a single group containing 3328 images), 12 GCPs were placed, and bundle adjustment generated a single intrinsic model for the camera that applies to all flights. The image bundle was realigned, and the intrinsic parameters were optimized.
3.3.2. Image Bundle Adjustment and Filtering
3.3.3. GCP Positioning and Camera Optimization
3.3.4. Dense Point Cloud Generation, Noise Removal/Reduction, and Ground Classification
3.3.5. Generation of DEM/DTM/Orthoimage and Accuracy Assessment
4. Results and Discussion
4.1. Stability of Lens Calibration
4.2. Point Cloud Error Identification and Mitigation
4.2.1. Systematic Doming Errors
- (a)
- Effect of GCP on systematic doming
- (b)
- Effect of camera calibration on systematic doming
- (c)
- Human-Induced systematic error (incorrect GCP positioning in images)
4.2.2. Errors during DEM and Orthoimage Generation
4.2.3. Errors Related to Surface of Water Bodies
4.2.4. Point Cloud Accuracy Assessment
5. Conclusions
- The stability of lens calibration is dependent on the camera system used. Survey-grade cameras with compound (telecentric lenses) tend to have better stability in calibration parameters compared to consumer-grade cameras with endocentric lenses.
- Well-distributed and not necessarily uniformly spaced GCPs reduce systematic doming and other artifacts. Careful planning of GCP placement must be an integral part of a successful UAV mission.
- Incorrect positioning of GCPs on the images due to automatic or manual detection problems may generate warping effects.
- Errors in camera calibration affect the absolute accuracy of the generated point cloud and may lead to warping errors.
- The optimum processing resolution was found to be 50% of the original resolution to optimize processing time, noise, and size of the point cloud.
- Data obtained from each flight is unique, and dynamic (separate) lens calibration is necessary for each flight—even for the same camera.
- Point cloud interpolation algorithms for the generation of gridded data should be carefully chosen; otherwise, it may result in unwanted artifacts (e.g., pits and bulges).
- Reflection/refraction from surface-water bodies generates artifacts that can be filtered using statistical outliers.
- The accuracy of an area (in field settings) is influenced by Ground Sampling Distance (GSD), topographic features, and the placement, density, and distribution of GCPs. A large number of GCPs does not guarantee high accuracy.
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AMP | Agisoft Metashape Professional |
| CC | CloudCompare |
| DEM | Digital Elevation Model |
| DTM | Digital Terrain Model |
| DSM | Digital Surface Model |
| GCP | Ground control Point |
| GNSS | Global Navigational Satellite System |
| GSD | Ground Sampling Distance |
| ICP | Iterative Closest Point |
| RGB | Red-Green-Blue |
| RGNIR | Red-Green-Near InfraRed |
| RMSE | Root Mean Square Error |
| SfM | Structure from Motion |
| UAV | Unmanned Aerial Vehicle |
References
- Chiabrando, F.; Nex, F.; Piatti, D.; Rinaudo, F. UAV and RPV systems for photogrammetric surveys in archaelogical areas: Two tests in the Piedmont region (Italy). J. Archaeol. Sci. 2011, 38, 697–710. [Google Scholar] [CrossRef]
- Chiabrando, F.; Teppati Losè, L. Performance evaluation of cots uav for architectural heritage documentation. A test on S.Giuliano chapel in Savigliano (Cn)—Italy. In Proceedings of the ISPRS—International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Bonn, Germany, 4–7 September 2017; Volume XLII-2-W6, pp. 77–84. [Google Scholar]
- da Costa, M.B.T.; Silva, C.A.; Broadbent, E.N.; Leite, R.V.; Mohan, M.; Liesenberg, V.; Stoddart, J.; do Amaral, C.H.; de Almeida, D.R.A.; da Silva, A.L.; et al. Beyond trees: Mapping total aboveground biomass density in the Brazilian savanna using high-density UAV-lidar data. For. Ecol. Manag. 2021, 491, 119155. [Google Scholar] [CrossRef]
- de Lima, R.S.; Lang, M.; Burnside, N.G.; Peciña, M.V.; Arumäe, T.; Laarmann, D.; Ward, R.D.; Vain, A.; Sepp, K. An Evaluation of the Effects of UAS Flight Parameters on Digital Aerial Photogrammetry Processing and Dense-Cloud Production Quality in a Scots Pine Forest. Remote Sens. 2021, 13, 1121. [Google Scholar] [CrossRef]
- Perroy, R.; Hughes, M.; Keith, L.; Collier, E.; Sullivan, T.; Low, G. Examining the Utility of Visible Near-Infrared and Optical Remote Sensing for the Early Detection of Rapid ‘Ōhi’a Death. Remote Sens. 2020, 12, 1846. [Google Scholar] [CrossRef]
- Joyce, K.E.; Duce, S.; Leahy, S.M.; Leon, J.; Maier, S.W. Principles and practice of acquiring drone-based image data in marine environments. Mar. Freshw. Res. 2019, 70, 952. [Google Scholar] [CrossRef]
- Thapa, G.J.; Thapa, K.; Thapa, R.; Jnawali, S.R.; Wich, S.A.; Poudyal, L.P.; Karki, S. Counting crocodiles from the sky: Monitoring the critically endangered gharial (Gavialis gangeticus) population with an unmanned aerial vehicle (UAV). J. Unmanned Veh. Syst. 2018, 6, 71–82. [Google Scholar] [CrossRef] [Green Version]
- Shaw, J.T.; Shah, A.; Yong, H.; Allen, G. Methods for quantifying methane emissions using unmanned aerial vehicles: A review. Philos. Trans. R. Soc. Math. Phys. Eng. Sci. 2021, 379, 20200450. [Google Scholar] [CrossRef]
- Skøien, K.R.; Alver, M.O.; Zolich, A.P.; Alfredsen, J.A. Feed spreaders in sea cage aquaculture—Motion characterization and measurement of spatial pellet distribution using an unmanned aerial vehicle. Comput. Electron. Agric. 2016, 129, 27–36. [Google Scholar] [CrossRef] [Green Version]
- Ubina, N.A.; Cheng, S.-C. A Review of Unmanned System Technologies with Its Application to Aquaculture Farm Monitoring and Management. Drones 2022, 6, 12. [Google Scholar] [CrossRef]
- Yang, M.-D.; Huang, K.-S.; Wan, J.; Tsai, H.P.; Lin, L.-M. Timely and Quantitative Damage Assessment of Oyster Racks Using UAV Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 2862–2868. [Google Scholar] [CrossRef]
- Adade, R.; Aibinu, A.M.; Ekumah, B.; Asaana, J. Unmanned Aerial Vehicle (UAV) applications in coastal zone management—A review. Environ. Monit. Assess. 2021, 193, 154. [Google Scholar] [CrossRef]
- Chapapría, V.E.; Peris, J.S.; González-Escrivá, J.A. Coastal Monitoring Using Unmanned Aerial Vehicles (UAVs) for the Management of the Spanish Mediterranean Coast: The Case of Almenara-Sagunto. Int. J. Environ. Res. Public. Health 2022, 19, 5457. [Google Scholar] [CrossRef]
- Taddia, Y.; Corbau, C.; Zambello, E.; Pellegrinelli, A. UAVs for Structure-From-Motion Coastal Monitoring: A Case Study to Assess the Evolution of Embryo Dunes over a Two-Year Time Frame in the Po River Delta, Italy. Sensors 2019, 19, 1717. [Google Scholar] [CrossRef] [Green Version]
- Acharya, B.S.; Bhandari, M.; Bandini, F.; Pizarro, A.; Perks, M.; Joshi, D.R.; Wang, S.; Dogwiler, T.; Ray, R.L.; Kharel, G.; et al. Unmanned Aerial Vehicles in Hydrology and Water Management: Applications, Challenges, and Perspectives. Water Resour. Res. 2021, 57, e2021WR029925. [Google Scholar] [CrossRef]
- Wufu, A.; Chen, Y.; Yang, S.; Lou, H.; Wang, P.; Li, C.; Wang, J.; Ma, L. Changes in Glacial Meltwater Runoff and Its Response to Climate Change in the Tianshan Region Detected Using Unmanned Aerial Vehicles (UAVs) and Satellite Remote Sensing. Water 2021, 13, 1753. [Google Scholar] [CrossRef]
- Ren, H.; Zhao, Y.; Xiao, W.; Hu, Z. A review of UAV monitoring in mining areas: Current status and future perspectives. Int. J. Coal Sci. Technol. 2019, 6, 320–333. [Google Scholar] [CrossRef] [Green Version]
- Flores, H.; Lorenz, S.; Jackisch, R.; Tusa, L.; Contreras, I.C.; Zimmermann, R.; Gloaguen, R. UAS-Based Hyperspectral Environmental Monitoring of Acid Mine Drainage Affected Waters. Minerals 2021, 11, 182. [Google Scholar] [CrossRef]
- Lindner, G.; Schraml, K.; Mansberger, R.; Hübl, J. UAV monitoring and documentation of a large landslide. Appl. Geomat. 2016, 8, 1–11. [Google Scholar] [CrossRef]
- Lucieer, A.; de Jong, S.M.; Turner, D. Mapping landslide displacements using Structure from Motion (SfM) and image correlation of multi-temporal UAV photography. Prog. Phys. Geogr. Earth Environ. 2014, 38, 97–116. [Google Scholar] [CrossRef]
- Sun, T.; Deng, Z.; Xu, Z.; Wang, X. Volume Estimation of Landslide Affected Soil Moisture Using TRIGRS: A Case Study of Longxi River Small Watershed in Wenchuan Earthquake Zone, China. Water 2021, 13, 71. [Google Scholar] [CrossRef]
- Coveney, S.; Roberts, K. Lightweight UAV digital elevation models and orthoimagery for environmental applications: Data accuracy evaluation and potential for river flood risk modelling. Int. J. Remote Sens. 2017, 38, 3159–3180. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Xie, H. A Review on Applications of Remote Sensing and Geographic Information Systems (GIS) in Water Resources and Flood Risk Management. Water 2018, 10, 608. [Google Scholar] [CrossRef] [Green Version]
- Alexiou, S.; Deligiannakis, G.; Pallikarakis, A.; Papanikolaou, I.; Psomiadis, E.; Reicherter, K. Comparing High Accuracy t-LiDAR and UAV-SfM Derived Point Clouds for Geomorphological Change Detection. ISPRS Int. J. Geo-Inf. 2021, 10, 367. [Google Scholar] [CrossRef]
- Cook, K.L. An evaluation of the effectiveness of low-cost UAVs and structure from motion for geomorphic change detection. Geomorphology 2017, 278, 195–208. [Google Scholar] [CrossRef]
- Esin, A.İ.; Akgul, M.; Akay, A.O.; Yurtseven, H. Comparison of LiDAR-based morphometric analysis of a drainage basin with results obtained from UAV, TOPO, ASTER and SRTM-based DEMs. Arab. J. Geosci. 2021, 14, 340. [Google Scholar] [CrossRef]
- Granados-Bolaños, S.; Quesada-Román, A.; Alvarado, G.E. Low-cost UAV applications in dynamic tropical volcanic landforms. J. Volcanol. Geotherm. Res. 2021, 410, 107143. [Google Scholar] [CrossRef]
- Anderson, K.; Westoby, M.J.; James, M.R. Low-budget topographic surveying comes of age: Structure from motion photogrammetry in geography and the geosciences. Prog. Phys. Geogr. Earth Environ. 2019, 43, 163–173. [Google Scholar] [CrossRef]
- Clapuyt, F.; Vanacker, V.; Van Oost, K. Reproducibility of UAV-based earth topography reconstructions based on Structure-from-Motion algorithms. Geomorphology 2016, 260, 4–15. [Google Scholar] [CrossRef]
- Over, J.-S.R.; Ritchie, A.C.; Kranenburg, C.J.; Brown, J.A.; Buscombe, D.D.; Noble, T.; Sherwood, C.R.; Warrick, J.A.; Wernette, P.A. Processing Coastal Imagery with Agisoft Metashape Professional Edition, Version 1.6—Structure from Motion Workflow Documentation; Open-File Report 2021-1039; U.S. Geological Survey: Reston, VA, USA, 2021.
- Sharma, S.; Chakravarti, D. UAV operations: An analysis of incidents and accidents with human factors and crew resource management perspective. Indian J. Aerosp. Med. 2005, 49, 29–36. [Google Scholar]
- Rodrigues, B.T.; Zema, D.A.; González-Romero, J.; Rodrigues, M.T.; Campos, S.; Galletero, P.; Plaza-álvarez, P.A.; Lucas-Borja, M.E. The use of unmanned aerial vehicles (Uavs) for estimating soil volumes retained by check dams after wildfires in mediterranean forests. Soil Syst. 2021, 5, 9. [Google Scholar] [CrossRef]
- Rotnicka, J.; Dłużewski, M.; Dąbski, M.; Rodzewicz, M.; Włodarski, W.; Zmarz, A. Accuracy of the UAV-Based DEM of Beach–Foredune Topography in Relation to Selected Morphometric Variables, Land Cover, and Multitemporal Sediment Budget. Estuaries Coasts 2020, 43, 1939–1955. [Google Scholar] [CrossRef]
- Suja, A.C.A.; Rajapakse, R.L.H.L. Evaluation of topographic data sources for 2D flood modelling: Case study of Kelani basin, Sri Lanka. IOP Conf. Ser. Earth Environ. Sci. 2020, 612, 012043. [Google Scholar] [CrossRef]
- Bushaw, J.; Ringelman, K.; Rohwer, F. Applications of Unmanned Aerial Vehicles to Survey Mesocarnivores. Drones 2019, 3, 28. [Google Scholar] [CrossRef] [Green Version]
- Eltner, A.; Schneider, D. Analysis of Different Methods for 3D Reconstruction of Natural Surfaces from Parallel-Axes UAV Images. Photogramm. Rec. 2015, 30, 279–299. [Google Scholar] [CrossRef]
- Gonçalves, J.A.; Henriques, R. UAV photogrammetry for topographic monitoring of coastal areas. ISPRS J. Photogramm. Remote Sens. 2015, 104, 101–111. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S. Mitigating systematic error in topographic model derived from UAV and ground-based image networks. Earth Surf. Process. Landf. 2014, 39, 1413–1420. [Google Scholar] [CrossRef] [Green Version]
- Peppa, M.V.; Hall, J.; Goodyear, J.; Mills, J.P. Photogrammetric assessment and comparison of DJI Phantom 4 Pro and Phantom 4 RTK small Unmanned Aircraft Systems. In Proceedings of the ISPRS—International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Bergamo, Italy, 6–8 February 2019; Volume XLII-2-W13, pp. 503–509. [Google Scholar]
- Agüera-Vega, F.; Carvajal-Ramírez, F.; Martínez-Carricondo, P. Assessment of photogrammetric mapping accuracy based on variation ground control points number using unmanned aerial vehicle. Measurement 2017, 98, 221–227. [Google Scholar] [CrossRef]
- Gindraux, S.; Boesch, R.; Farinotti, D. Accuracy Assessment of Digital Surface Models from Unmanned Aerial Vehicles’ Imagery on Glaciers. Remote Sens. 2017, 9, 186. [Google Scholar] [CrossRef] [Green Version]
- Nouwakpo, S.K.; Weltz, M.A.; McGwire, K. Assessing the performance of structure-from-motion photogrammetry and terrestrial LiDAR for reconstructing soil surface microtopography of naturally vegetated plots. Earth Surf. Process. Landf. 2016, 41, 308–322. [Google Scholar] [CrossRef]
- Rock, G.; Ries, J.B.; Udelhoven, T. Sensitivity analysis of UAV-photogrammetry for creating digital elevation models (DEM). In Proceedings of the ISPRS—International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Zurich, Switzerland, 14–16 September 2012; Volume XXXVIII-1-C22, pp. 69–73. [Google Scholar]
- Smith, M.W.; Carrivick, J.L.; Quincey, D.J. Structure from motion photogrammetry in physical geography. Prog. Phys. Geogr. Earth Environ. 2016, 40, 247–275. [Google Scholar] [CrossRef] [Green Version]
- Isenburg, M. LAStools. Available online: https://rapidlasso.com/lastools/ (accessed on 1 July 2020).
- Butler, H.; Chambers, B.; Hartzell, P.; Glennie, C. PDAL: An open source library for the processing and analysis of point clouds. Comput. Geosci. 2021, 148, 104680. [Google Scholar] [CrossRef]
- c42f Displaz—A Viewer for Geospatial Point Clouds. Available online: https://github.com/c42f/displaz (accessed on 12 March 2023).
- CloudCompare—Open Source Project. Available online: https://www.cloudcompare.org/ (accessed on 19 January 2023).
- Gaponov, M.; Machikhin, A.; Pozhar, V.; Shurygin, A. Acousto-optical imaging spectrometer for unmanned aerial vehicles. In Proceedings of the 23rd International Symposium on Atmospheric and Ocean Optics: Atmospheric Physics. Int. Soc. Opt. Photonics 2017, 10466, 104661V. [Google Scholar]
- Pan, B.; Yu, L.; Wu, D.; Tang, L. Systematic errors in two-dimensional digital image correlation due to lens distortion. Opt. Lasers Eng. 2013, 51, 140–147. [Google Scholar] [CrossRef]
- Fraser, C.S. Automatic Camera Calibration in Close Range Photogrammetry. Photogramm. Eng. Remote Sens. 2013, 79, 381–388. [Google Scholar] [CrossRef] [Green Version]
- Carbonneau, P.E.; Dietrich, J.T. Cost-effective non-metric photogrammetry from consumer-grade sUAS: Implications for direct georeferencing of structure from motion photogrammetry: Cost-Effective Non-Metric Photogrammetry from Consumer-Grade sUAS. Earth Surf. Process. Landf. 2017, 42, 473–486. [Google Scholar] [CrossRef] [Green Version]
- Brown, D. Close-Range Camera Calibration. Photogramm. Eng. 1966, 37, 855–866. [Google Scholar]
- LLC, A. Agisoft Lens User Manual—Version 0.4.0. Available online: https://manualzz.com/doc/4203014/agisoft-lens-user-manual (accessed on 2 July 2020).
- Altena, B.; Goedemé, T. Assessing UAV platform types and optical sensor specifications. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 2, 17–24. [Google Scholar] [CrossRef] [Green Version]
- Moru, D.K.; Borro, D. Analysis of different parameters of influence in industrial cameras calibration processes. Measurement 2021, 171, 108750. [Google Scholar] [CrossRef]
- Fraser, C.S. Digital camera self-calibration. ISPRS J. Photogramm. Remote Sens. 1997, 52, 149–159. [Google Scholar] [CrossRef]
- Rusu, R.B.; Marton, Z.C.; Blodow, N.; Dolha, M.; Beetz, M. Towards 3D Point cloud based object maps for household environments. Robot. Auton. Syst. 2008, 56, 927–941. [Google Scholar] [CrossRef]
- Gil, A.L.; Núñez-Casillas, L.; Isenburg, M.; Benito, A.A.; Bello, J.J.R.; Arbelo, M. A comparison between LiDAR and photogrammetry digital terrain models in a forest area on Tenerife Island. Can. J. Remote Sens. 2013, 39, 396–409. [Google Scholar] [CrossRef]
- Pingel, T.J.; Clarke, K.C.; McBride, W.A. An improved simple morphological filter for the terrain classification of airborne LIDAR data. ISPRS J. Photogramm. Remote Sens. 2013, 77, 21–30. [Google Scholar] [CrossRef]
- Cheng, J.; Leng, C.; Wu, J.; Cui, H.; Lu, H. Fast and Accurate Image Matching with Cascade Hashing for 3D Reconstruction. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 1–8. [Google Scholar]
- Rosnell, T.; Honkavaara, E. Point Cloud Generation from Aerial Image Data Acquired by a Quadrocopter Type Micro Unmanned Aerial Vehicle and a Digital Still Camera. Sensors 2012, 12, 453–480. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rote, G. Computing the minimum Hausdorff distance between two point sets on a line under translation. Inf. Process. Lett. 1991, 38, 123–127. [Google Scholar] [CrossRef]
- Brinkmann, K.; Schumacher, J.; Dittrich, A.; Kadaore, I.; Buerkert, A. Analysis of landscape transformation processes in and around four West African cities over the last 50 years. Landsc. Urban Plan. 2012, 105, 94–105. [Google Scholar] [CrossRef]
- Wackrow, R.; Chandler, J.H. A convergent image configuration for DEM extraction that minimises the systematic effects caused by an inaccurate lens model. Photogramm. Rec. 2008, 23, 6–18. [Google Scholar] [CrossRef] [Green Version]
- Uysal, M.; Toprak, A.S.; Polat, N. DEM generation with UAV Photogrammetry and accuracy analysis in Sahitler hill. Measurement 2015, 73, 539–543. [Google Scholar] [CrossRef]
- LAStools: Blast2dem. Available online: https://github.com/LAStools/LAStools/blob/2bbbfa918df01b7f364d176610e9785bceb4d5de/bin/blast2dem_README.md (accessed on 17 March 2023).
- Pock, T.; Zebedin, L.; Bischof, H. TGV-Fusion. In Rainbow of Computer Science: Dedicated to Hermann Maurer on the Occasion of His 70th Birthday; Calude, C.S., Rozenberg, G., Salomaa, A., Eds.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2011; Volume 6570, pp. 245–258. ISBN 978-3-642-19390-3. [Google Scholar] [CrossRef]
- Agisoft Metashape Algorithm: References List. Available online: https://agisoft.freshdesk.com/support/solutions/articles/31000156964-references-list (accessed on 22 January 2023).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site. No. | Flight Month, Year | Area (km2) | No. of Flights | Duration per Flight (min) | Mission Duration (Days) | UAV Used |
|---|---|---|---|---|---|---|
| 1 | February, 2016 | 17 | 9 | 30–35 | 4 | Trimble UX5 |
| 2 | December, 2016 | 141.8 | 27 | 30–35 | 6 | Trimble UX5 |
| 3 | August, 2018 | 65.78 | 49 | 15–17 | 5 | DJI Phantom 4 Pro |
| 4 | January, 2019 | 4.61 | 47 | 5–15 | 7 | DJI Phantom 4 Pro |
| (a) NEX5T (n = 28 flights) | |||||||||
| Lens Parameters | fx | fy | cx | cy | k1 (×10−2) | k2 (×10−2) | k3 (×10−3) | p1 (×10−3) | p2 (×10−4) |
| Mean | 3232.05 | 3232.07 | 2446.86 | 1618.91 | −4.81 | 3.49 | −9.27 | −1.17 | 6.48 |
| Std. Dev. | 12.35 | 12.37 | 9.69 | 6.00 | 0.17 | 0.39 | 2.98 | 0.20 | 1.30 |
| % Var | 0.38 | 0.38 | 0.4 | 0.37 | 3.6 | 11.38 | 32.16 | 17.13 | 19.98 |
| (b) DJI FC6310 (n = 18 flights) | |||||||||
| Lens Parameters | fx | fy | cx | cy | k1 (×10−2) | k2 (×10−2) | k3 (×10−3) | p1 (×10−3) | p2 (×10−4) |
| Mean | 3779.13 | 3781.01 | 2732.90 | 1755.68 | 0.45 | −0.41 | 5.41 | 0.33 | −2.11 |
| Std. Dev. | 110.434 | 110.724 | 3.136 | 125.516 | 0.15 | 0.33 | 3.51 | 0.16 | 1.00 |
| % Var | 2.92 | 2.93 | 0.11 | 7.15 | 33.25 | 79.73 | 64.9 | 49.77 | 47.27 |
| Case No. (Point Cloud Name) | Case 1 (P1) | Case 2 (P2) | Case 3 (P3) | |||
|---|---|---|---|---|---|---|
| Flight Numbers | Flight 1 | Flight 1 | Flight 2 | Flight 3 | Flight 1 | |
| Intrinsic Parameters | f | 3239.95 | 3240.21 | 3241.16 | 3238.05 | 3238.91 |
| cx | −2.85 | −4.76 | −3.26 | 1.06 | −4.82 | |
| cy | −21.93 | −23.00 | −21.69 | −21.10 | −22.92 | |
| b1 (×10−2) | 6.98 | 0 | 0 | 0 | 0 | |
| b2 (×10−1) | −5.01 | 0 | 0 | 0 | 0 | |
| k1 (×10−2) | −4.35 | −4.78 | −4.78 | −4.82 | −4.80 | |
| k2 (×10−2) | 1.23 | 3.42 | 3.44 | 3.52 | 3.41 | |
| k3 (×10−2) | 3.32 | −0.87 | −0.89 | −0.94 | −0.86 | |
| k4 (×10−2) | −2.63 | 0 | 0 | 0 | 0 | |
| p1 (×10−4) | 8.45 | 9.17 | 8.62 | 7.38 | 9.09 | |
| p2 (×10−4) | −8.58 | −8.62 | −8.40 | −8.70 | −8.56 | |
| Sl. No. | GCP Altitude (in m) | DEM (z) in m | RMS (dz) in cm | ||||
|---|---|---|---|---|---|---|---|
| Case 1 | Case 2 | Case 3 | Case 1 | Case 2 | Case 3 | ||
| 1 | 398.26 | 398.28 | 398.29 | 402.50 | 2.40 | 3.40 | 424.40 |
| 2 | 394.08 | 394.27 | 394.20 | 397.11 | 18.70 | 11.70 | 302.70 |
| 3 | 397.71 | 397.75 | 397.69 | 400.54 | 4.00 | 2.00 | 283.00 |
| 4 | 393.39 | 393.42 | 393.40 | 396.82 | 3.30 | 1.30 | 343.30 |
| 5 | 403.02 | 403.00 | 403.02 | 407.91 | 2.10 | 0.10 | 488.90 |
| 6 | 405.09 | 405.04 | 405.13 | 411.11 | 5.30 | 3.70 | 601.70 |
| 7 | 400.73 | 400.76 | 400.75 | 408.05 | 2.80 | 1.80 | 731.80 |
| 8 | 391.84 | 391.87 | 391.83 | 398.62 | 3.30 | 0.70 | 678.30 |
| 9 | 395.35 | 395.35 | 395.32 | 401.33 | 0.20 | 3.20 | 597.80 |
| 10 | 388.03 | 387.99 | 387.98 | 391.75 | 3.50 | 4.50 | 372.50 |
| 11 | 393.19 | 393.17 | 393.18 | 396.56 | 2.00 | 1.00 | 337.00 |
| 12 | 382.62 | 382.67 | 382.62 | 386.23 | 5.00 | 0.00 | 361.00 |
| 13 | 376.19 | 376.22 | 376.21 | 378.84 | 3.10 | 2.10 | 265.10 |
| 14 | 387.59 | 387.59 | 387.59 | 390.23 | 0.40 | 0.40 | 264.40 |
| 15 | 399.55 | 399.51 | 399.54 | 401.96 | 3.70 | 0.70 | 241.30 |
| 16 | 398.64 | 398.65 | 398.69 | 401.60 | 1.50 | 5.50 | 296.50 |
| 17 | 405.56 | 405.65 | 405.61 | 408.00 | 9.10 | 5.10 | 244.10 |
| 18 | 405.52 | 405.69 | 405.63 | 408.32 | 17.40 | 11.40 | 280.40 |
| Average (in cm) | 4.88 | 3.26 | 395.23 | ||||
| Before | After | |||||
|---|---|---|---|---|---|---|
| Description | P1 | P2 | P3 | P1 | P2 | P3 |
| Total No of points (106) | 140.48 | 140.51 | 139.43 | 3.73 | 3.73 | 3.73 |
| Point density (points/m2) | 38.13 | 38.14 | 37.83 | 1.01 | 1.01 | 1.01 |
| Point spacing (m) | 0.16 | 0.16 | 0.16 | 0.99 | 0.99 | 0.99 |
| Description | P1 vs. P2 | P2 vs. P3 |
|---|---|---|
| Scaling | 0.00 | 0.00 |
| Translation Axis (m) | 0.33; −0.31; −0.89 | −0.19; −0.76; −0.63 |
| Rotation Angle (deg) | 0.00 | 0.20 |
| Center shift (m) | 0.44; 0.10; 0.20 | 5.73; −5.33; −4.86 |
| GCP | RMSEr Error (cm) | ||
|---|---|---|---|
| Case 1 | Case 2 | Case 3 | |
| P1 | 15.1 | 10.3 | 744.1 |
| P2 | 2.1 | 5.5 | 759.5 |
| P3 | 14.5 | 8.2 | 638.7 |
| P4 | 8.2 | 4.4 | 685.5 |
| P5 | 5.1 | 3.7 | 699 |
| P6 | 3.8 | 4.4 | 842 |
| P7 | 1.9 | 5.3 | 966.8 |
| P8 | 6.9 | 5.8 | 914.7 |
| P9 | 7.5 | 4.2 | 777.1 |
| P10 | 5.7 | 6.6 | 744.3 |
| P11 | 6.3 | 5.6 | 631.4 |
| P12 | 1.4 | 5 | 627.3 |
| P13 | 6.9 | 4.4 | 658.4 |
| P14 | 6.7 | 5.7 | 655.1 |
| P15 | 10.8 | 7.9 | 622.9 |
| RMSE | 6.86 | 5.8 | 731.12 |
| Study Area | Total Area after Removal of Buffer (km2) | Flight Height (m)/Number of Images Used | Total No. of GCPs Acquired/ Used in Generating Point Cloud/ Checking Accuracy | GCP Density (GCP/km2) | GSD of Orthoimage/DEM (cm) | RMSEz of DSM (cm) | Remarks |
|---|---|---|---|---|---|---|---|
| Mandsaur (Undulating terrain with scanty vegetation) | 14 | 370–405/ 9675 | 138/40/40 | 2.85 | 4.2/8.3 | 6.41 | No random error |
| Mayurbhanj (Mixed terrain, forested and agricultural) | 121 | 350 8729 | 103/59/42 | 0.48 | 11.6/23.3 | 10.58 | Doming error |
| Kawardha (lowland river basin) | 56 | 300/ 10,425 | 98/44/42 | 0.78 | 8/16.3 | 12.32 | No random error |
| Anpara (urban) | 4 | 150–200/ 8236 | 315/195/100 | 48.75 | 4.5/9.1 | 36.54 | Random error, heterogenous terrain |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sarkar, D.; Sinha, R.; Bookhagen, B. Towards a Guideline for UAV-Based Data Acquisition for Geomorphic Applications. Remote Sens. 2023, 15, 3692. https://doi.org/10.3390/rs15143692
Sarkar D, Sinha R, Bookhagen B. Towards a Guideline for UAV-Based Data Acquisition for Geomorphic Applications. Remote Sensing. 2023; 15(14):3692. https://doi.org/10.3390/rs15143692
Chicago/Turabian StyleSarkar, Dipro, Rajiv Sinha, and Bodo Bookhagen. 2023. "Towards a Guideline for UAV-Based Data Acquisition for Geomorphic Applications" Remote Sensing 15, no. 14: 3692. https://doi.org/10.3390/rs15143692