
Fast Variational Bayesian Inference for Space-Time Adaptive Processing

Abstract
:1. Introduction
- (1)
- The frame of VBI with multiple measurement vectors is generalized to the STAP application. This allows for an increase in convergence speed.
- (2)
- In order to improve computational efficiency, a fast STAP algorithm based on VBI (M-FVBI-STAP) is proposed. A new atoms selection rule is constructed, which is able to substantially reduce the dimension of the matrix inverse problem.
- (3)
- Numerous experiment results on simulated data and measured data illustrate that the proposed algorithm can achieve better clutter suppression and target detection performance.
2. Signal Model and Bayesian Model
2.1. Signal Model
2.2. Bayesian Model
3. Proposed Algorithm
3.1. VBI Algorithm
- (1)
- update
- (2)
- Update
- (3)
- Update :
| Algorithm 1: Pseudocode of the M-VBI. |
| step 1: Input: data and dictionary ; step 2: Initialize: , 1; step 3: While if it does not converge: 1. Calculate , and by Equations (23) and (24); 2. Calculate by Equation (26); 3. Calculate by Equation (28); End step 4: Obtain CNCM by Equation (29); step 5: Output: the STAP weight. |
3.2. Variational Fast Solution
- (1)
- If is excluded from the model and , add to the model;
- (2)
- If is in the model and , re-estimate ;
- (3)
- If is in the model and , remove from the model.
| Algorithm 2: Pseudocode of the M-F-VBI. |
| step 1: Input: data and dictionary ; step 2: Initialize: 0, , and ; step 3: While, if it does not converge: 1. Calculate all , by (31) and choose the atomic index by (38); 2. If is in the model and , use (44)–(47) to update parameters; If is in the model and , use (48)–(51) to update parameters; If is excluded from the model and , use (53)–(56) to update parameters. 3. Update by (28). End step 4: Obtain CNCM by (29); step 5: Output: the STAP weight. |
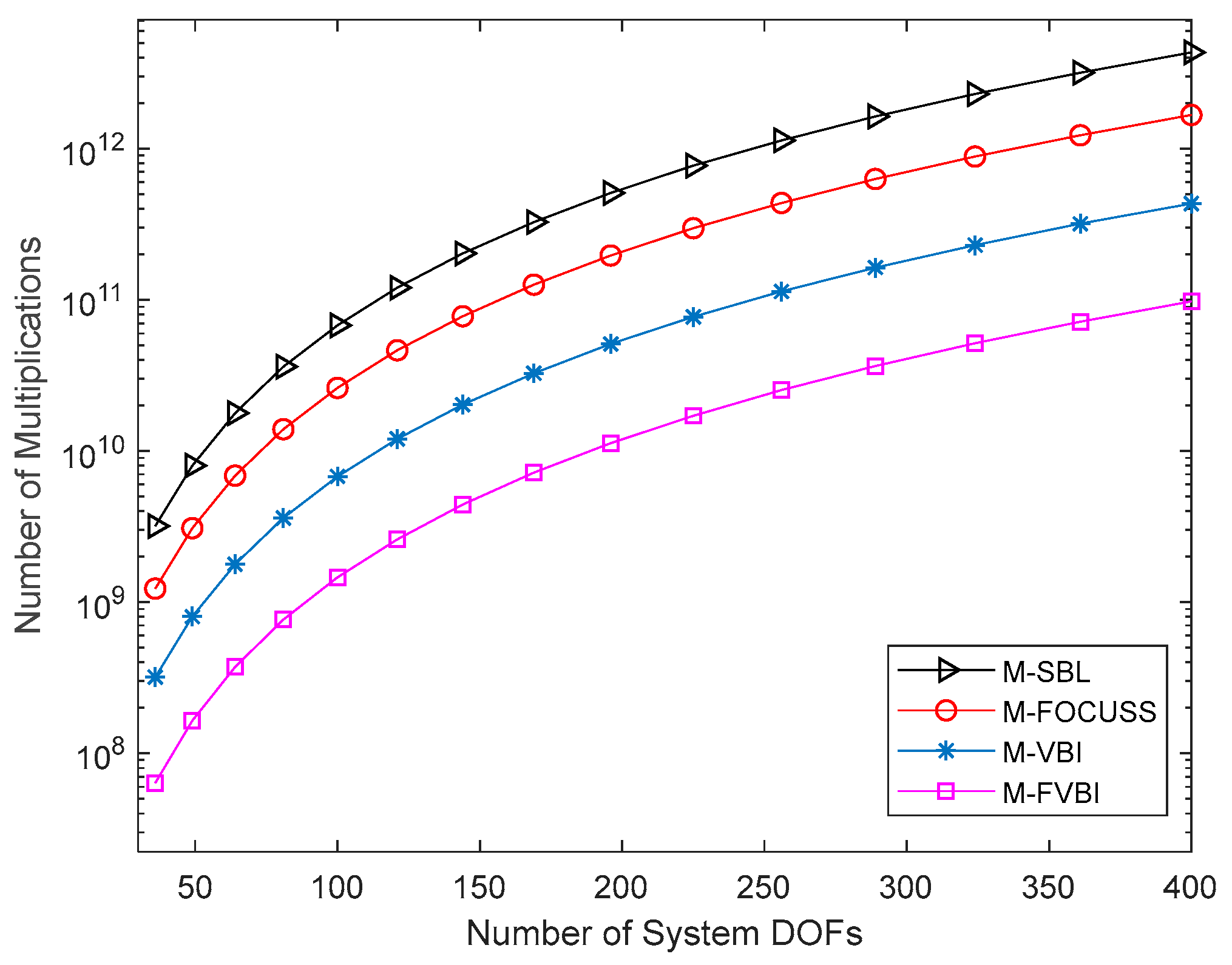
4. Computational Complexity Analysis
5. Numerical Experiments
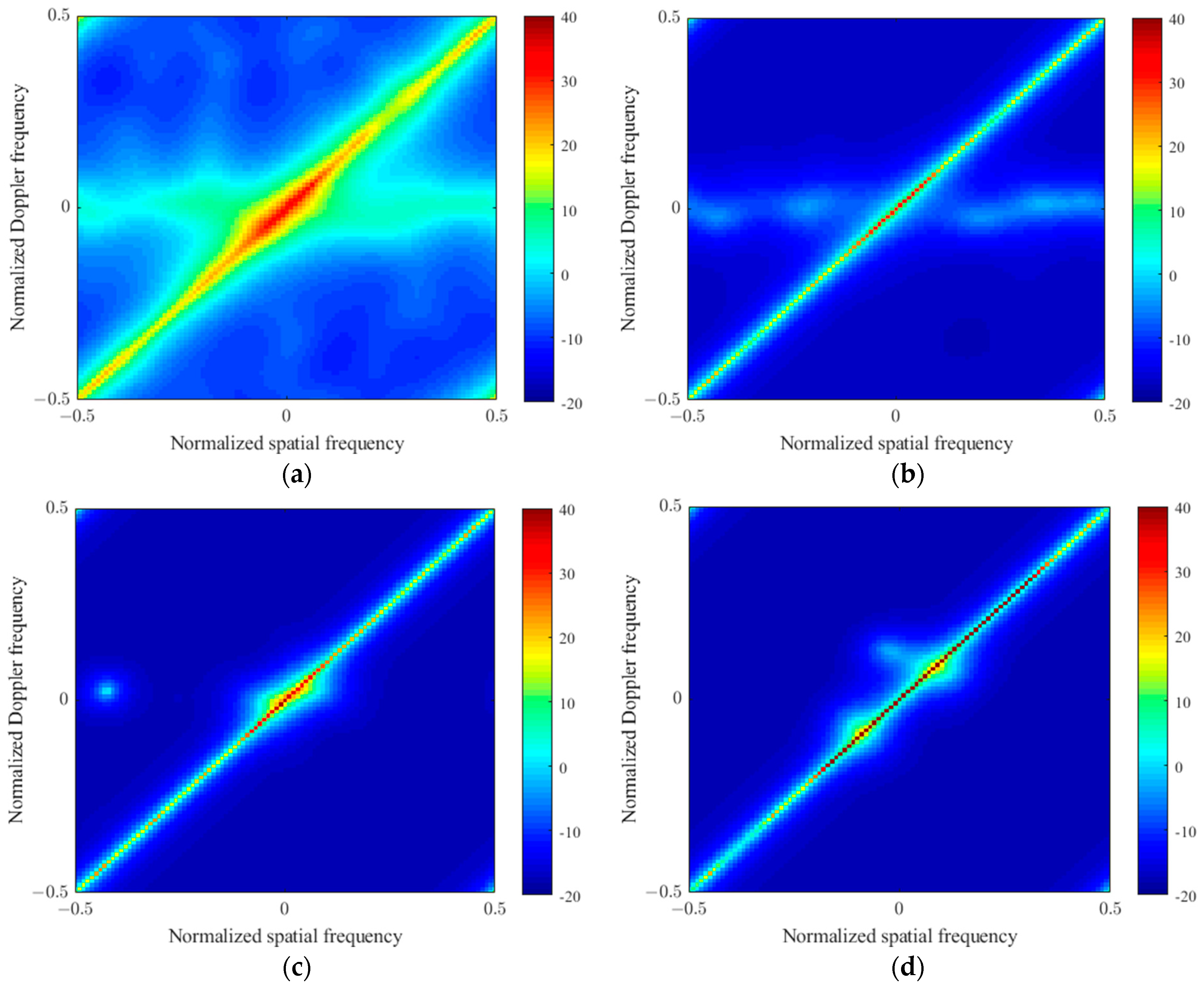
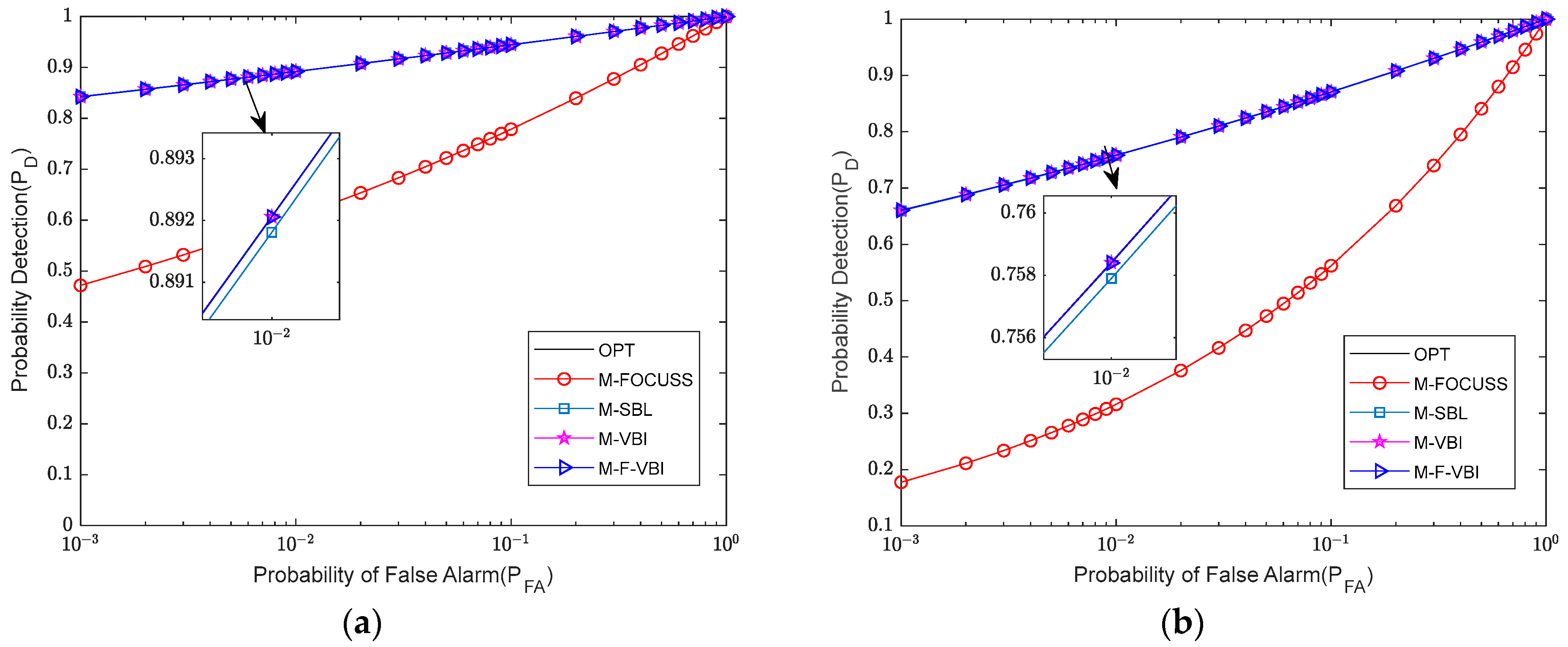
5.1. Simulated Data
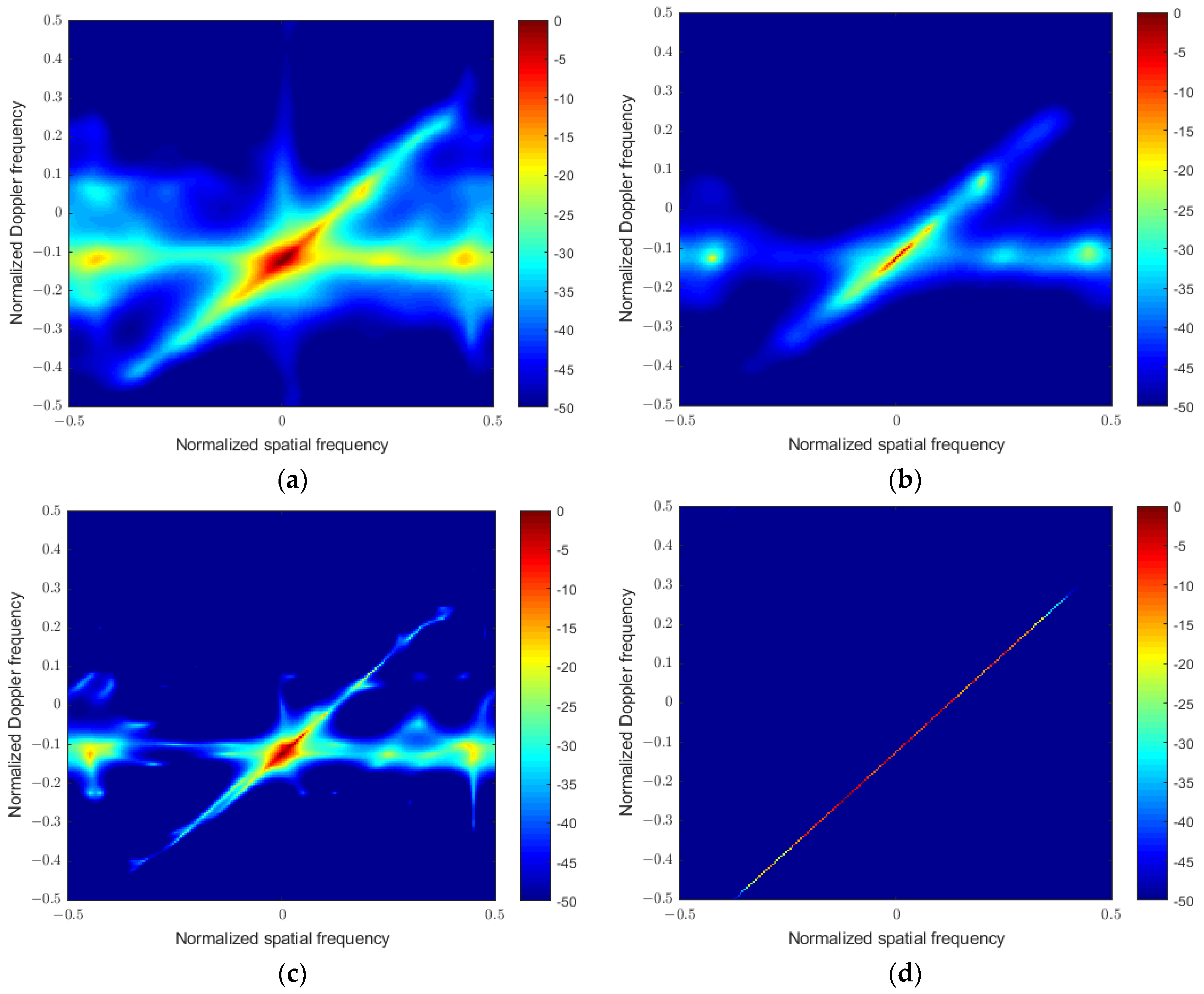
5.2. Measured Data
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
- (1)
- Update formulas for removing the atoms.
- (2)
- Update the formulas of re-estimating atoms.
- (3)
- Update the formulas for adding atoms.
References
- Ward, J. Space-Time Adaptive Processing for Airborne Radar; Technical Report; MIT Lincoln Laboratory: Lexington, KY, USA, 1994. [Google Scholar]
- Brennan, L.E.; Reed, L.S. Theory of adaptive radar. IEEE Trans. Aerosp. Electron. Syst. 1973, 9, 237–251. [Google Scholar] [CrossRef]
- Smith, S.T. Adaptive radar. In Wiley Encyclopedia of Electrical and Electronics Engineering; Wiley: Hoboken, NJ, USA, 2001. [Google Scholar]
- Melvin, W.L. Space-time adaptive processing and adaptive arrays: Special collection of papers. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 508509. [Google Scholar] [CrossRef]
- Klemm, R. Principles of Space-Time Adaptive Processing; The Institution of Electrical Engineers: London, UK, 2006. [Google Scholar]
- Reed, L.S.; Mallet, J.D.; Brennan, L.E. Rapid convergence rate in adaptive arrays. IEEE Trans. Aerosp. Electron. Syst. 1974, 10, 853–863. [Google Scholar] [CrossRef]
- Pallotta, L.; Farina, A.; Smith, S.T.; Giunta, G. Phase-only space-time adaptive processing. IEEE Access 2021, 9, 147250–147263. [Google Scholar] [CrossRef]
- Haimovich, A.M.; Bar-Ness, Y. An eigenanalysis interference canceller. IEEE Trans. Signal Process. 1991, 39, 76–84. [Google Scholar] [CrossRef]
- Hua, Y.; Nikpour, M.; Stoica, P. Optimal reduced rank estimation and filtering. IEEE Trans. Signal Process. 2001, 49, 457–469. [Google Scholar]
- Goldstein, J.S.; Reed, I.S.; Scharf, L.L. A multistage representation of the Wiener filter based on orthogonal projections. IEEE Trans. Inf. Theory 1998, 44, 2943–2959. [Google Scholar] [CrossRef]
- Haimovich, A. The eigencanceler: Adaptive radar by eigenanalysis methods. IEEE Trans. Aerosp. Electron. Syst. 1996, 32, 532–542. [Google Scholar] [CrossRef]
- Wang, H.; Cai, L. On adaptive spatial-temporal processing for airborne surveillance radar systems. IEEE Trans. Aerosp. Electron. Syst. 1994, 30, 660–670. [Google Scholar] [CrossRef]
- Klemm, R. Adaptive airborne MTI: An auxiliary channel approach. IEEE Proc. F Commun. Radar Signal Process. 1987, 134, 269–276. [Google Scholar] [CrossRef]
- DiPietro, R.C. Extended factored space-time processing for airborne radar systems. Signals Syst. Comput. 1992, 1, 425–430. [Google Scholar]
- Zhang, W.; He, Z.; Li, J.; Liu, H.; Sun, Y. A method for finding best channels in beam-space post-Doppler reduced-dimension STAP. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 254–264. [Google Scholar] [CrossRef]
- Lin, X.; Blum, R.S. Robust STAP algorithms using prior knowledge for airborne radar applications. Signal Process. 1999, 79, 273–287. [Google Scholar] [CrossRef]
- Guerci, J.R.; Baranoski, E.J. Knowledge-aided adaptive radar at DARPA: An overview. IEEE Signal Process. 2006, 23, 41–50. [Google Scholar] [CrossRef]
- Gerlach, K.; Picciolo, M.L. Airborne/spacebased radar STAP using a structured covariance matrix. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 269–281. [Google Scholar] [CrossRef]
- Steiner, M.; Gerlach, K. Fast converging adaptive processor or a structured covariance matrix. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 1115–1126. [Google Scholar] [CrossRef]
- Kang, B.; Monga, V.; Rangaswamy, M. Rank-constrained maximum likelihood estimation of structured covariance matrices. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 501–515. [Google Scholar] [CrossRef]
- De Maio, A.; De Nicola, S.; Landi, L.; Farina, A. Knowledge-aided covariance matrix estimation: A MAXDET approach. IET Radar Sonar Navig. 2009, 3, 341–356. [Google Scholar] [CrossRef]
- Aubry, A.; De Maio, A.; Pallotta, L. A geometric approach to covariance matrix estimation and its applications to radar problems. IEEE Trans. Signal Process. 2017, 66, 907–922. [Google Scholar] [CrossRef]
- Sun, K.; Zhang, H.; Li, G.; Meng, H.D.; Wang, X.Q. A novel STAP algorithm using sparse recovery technique. IEEE Int. Geosci. Remote Sens. Symp. 2009, 1, 3761–3764. [Google Scholar]
- Sun, K.; Meng, H.; Wang, Y. Direct data domain STAP using sparse representation of clutter spectrum. Signal Process. 2011, 91, 2222–2236. [Google Scholar] [CrossRef]
- Yang, Z.; Li, X.; Wang, H.; Jiang, W. On clutter sparsity analysis in space–time adaptive processing airborne radar. IEEE Geosci. Remote. Sens. Lett. 2013, 10, 1214–1218. [Google Scholar] [CrossRef]
- Cotter, S.F.; Rao, B.D.; Engan, K.; Kreutz-Delgado, K. Sparse solutions to linear inverse problems with multiple measurement vectors. IEEE Trans. Signal Process. 2005, 53, 2477–2488. [Google Scholar] [CrossRef]
- Tropp, J.; Gilbert, A. Signal recovery from random measurements via orthogonal matching pursuit. IEEE Trans. Inf. Theory 2007, 53, 4655–4666. [Google Scholar] [CrossRef]
- Gorodnitsky, I.; Rao, B. Sparse signal reconstruction from limited data using FOCUSS a re-weighted minimum norm algorithm. IEEE Trans. Signal Process. 1997, 45, 600–616. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, Y.; Amin, M.G.; Himed, B. Space-time adaptive processing and motion parameter estimation in multistatic passive radar using sparse Bayesian learning. IEEE Trans. Geosci. Remote. Sens. 2016, 54, 944–957. [Google Scholar] [CrossRef]
- Duan, K.Q.; Wang, Z.T.; Xie, W.C.; Chen, H.; Wang, Y.L. Sparsity-based STAP algorithm with multiple measurement vectors via sparse Bayesian learning strategy for airborne radar. IET Signal Process. 2017, 11, 544–553. [Google Scholar] [CrossRef]
- Wang, Z.T.; Xie, W.C.; Duan, K.Q. Clutter suppression algorithm base on fast converging sparse Bayesian learning for airborne radar. Signal Process. 2017, 130, 159–168. [Google Scholar] [CrossRef]
- Tzikas, D.; Likas, A.; Galatsanos, N. The variational approximation for Bayesian inference. IEEE Signal Process. 2008, 25, 131–146. [Google Scholar] [CrossRef]
- Guo, K.; Zhang, L.; Li, Y.; Zhou, T.; Yin, J. Variational Bayesian Inference for DOA Estimation under Impulsive Noise and Non-uniform Noise. IEEE Trans. Aerosp. Electron. Syst. 2023. [Google Scholar] [CrossRef]
- Shutin, D.; Buchgraber, T.; Kulkarni, S.; Poor, H. Fast variational sparse Bayesian learning with automatic relevance determination for superimposed signals. IEEE Trans. Signal Process. 2011, 95, 6257–6261. [Google Scholar] [CrossRef]
- Zhou, S.; Xu, A.; Tang, Y.; Shen, L. Fast Bayesian inference of reparameterized gamma process with random effects. IEEE Trans. Reliab. 2023, in press. [Google Scholar] [CrossRef]
- Turlapaty, A.C. Variational Bayesian estimation of statistical properties of composite gamma log-normal distribution. IEEE Trans. Signal Process. 2020, 68, 6481–6492. [Google Scholar] [CrossRef]
- Yuan, W.; Wei, Z.; Yuan, J.; Ng, D.W.K. A Simple Variational Bayes Detector for Orthogonal Time Frequency Space (OTFS) Modulation. IEEE Trans. Veh. Technol. 2020, 69, 7976–7980. [Google Scholar] [CrossRef]
- Bishop, C. Pattern Recognition and Machine Learning; Springer: New York, NY, USA, 2006. [Google Scholar]
- Thomas, B. Variational Sparse Bayesian Learning: Centralized and Distributed Processing; Graz University of Technology: Graz, Austria, 2013. [Google Scholar]
- Tipping, M.; Faul, A. Fast marginal likelihood maximization for sparse Bayesian models. In Proceedings of the Ninth International Workshop on Artificial Intelligence and Statistics, Key West, FL, USA, 3–6 January 2003; pp. 276–283. [Google Scholar]
- Robey, F.C.; Fuhrmann, D.; Kelly, E.; Nitzberg, R. A CFAR adaptive matched filter detector. IEEE Trans. Aerosp. Electron. Syst. 1992, 28, 208–216. [Google Scholar] [CrossRef]
- Wu, Y.; Wang, T.; Wu, J. A knowledge-aided space time adaptive processing based on road network data. J. Electron. Sci. Technol. 2015, 37, 613–618. [Google Scholar]
- Melvin, W.L.; Wicks, M.C. Improving practical space-time adaptive radar. In Proceedings of the 1997 IEEE National Radar Conference, Syracuse, NY, USA, 13–15 May 2005; pp. 48–53. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Computational Load |
|---|---|
| M-SBL | |
| M-FOCUSS | |
| M-VBI | |
| M-FVBI |
| Parameter | Value | Unit |
|---|---|---|
| Number of elements | 8 | / |
| Number of pulses | 8 | / |
| Wavelength | 0.3 | m |
| Bandwidth | 2.5 | MHz |
| Height of platform | 150 | m/s |
| Velocity of platform | 9000 | m |
| Pulse repetition frequency (PRF) | 2000 | Hz |
| Clutter to noise ratio (CNR) | 40 | dB |
| Algorithms | Running Time |
|---|---|
| M-SBL | 34.88 s |
| M-FOCUSS | 11.16 s |
| M-VBI | 3.70 s |
| M-FVBI | 0.05 s |
| Algorithms | Results |
|---|---|
| M-SBL | 16.43 dB |
| M-FOCUSS | 16.89 dB |
| M-VBI | 18.86 dB |
| M-FVBI | 19.58 dB |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Wang, T.; Wang, D. Fast Variational Bayesian Inference for Space-Time Adaptive Processing. Remote Sens. 2023, 15, 4334. https://doi.org/10.3390/rs15174334
Zhang X, Wang T, Wang D. Fast Variational Bayesian Inference for Space-Time Adaptive Processing. Remote Sensing. 2023; 15(17):4334. https://doi.org/10.3390/rs15174334
Chicago/Turabian StyleZhang, Xinying, Tong Wang, and Degen Wang. 2023. "Fast Variational Bayesian Inference for Space-Time Adaptive Processing" Remote Sensing 15, no. 17: 4334. https://doi.org/10.3390/rs15174334
APA StyleZhang, X., Wang, T., & Wang, D. (2023). Fast Variational Bayesian Inference for Space-Time Adaptive Processing. Remote Sensing, 15(17), 4334. https://doi.org/10.3390/rs15174334