




Neural Network-Based Wind Measurements in Rainy Conditions Using the HY-2A Scatterometer


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Data and Methods
2.1. Datasets
2.1.1. HY-2A Scatterometer Data
2.1.2. ECMWF ERA5 Wind Field Data
2.1.3. SSM/I Rain Rate Data
2.1.4. TAO Buoy Data
2.2. Data Collocation Criteria
2.3. Data Validation
2.3.1. Verification of ECMWF Wind Field Data
2.3.2. Validating the Retrieved Wind Speed of the HY-2A Scatterometer
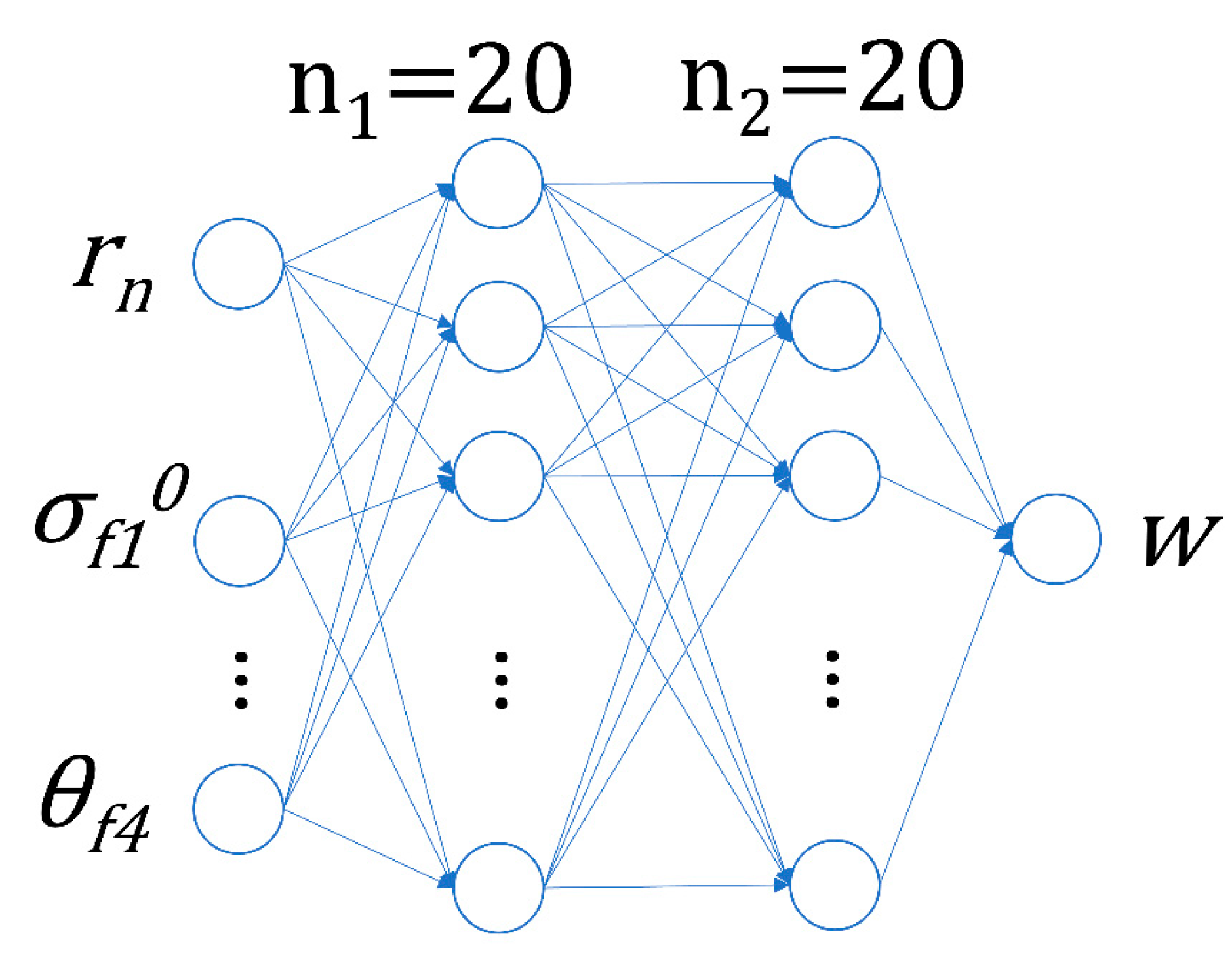
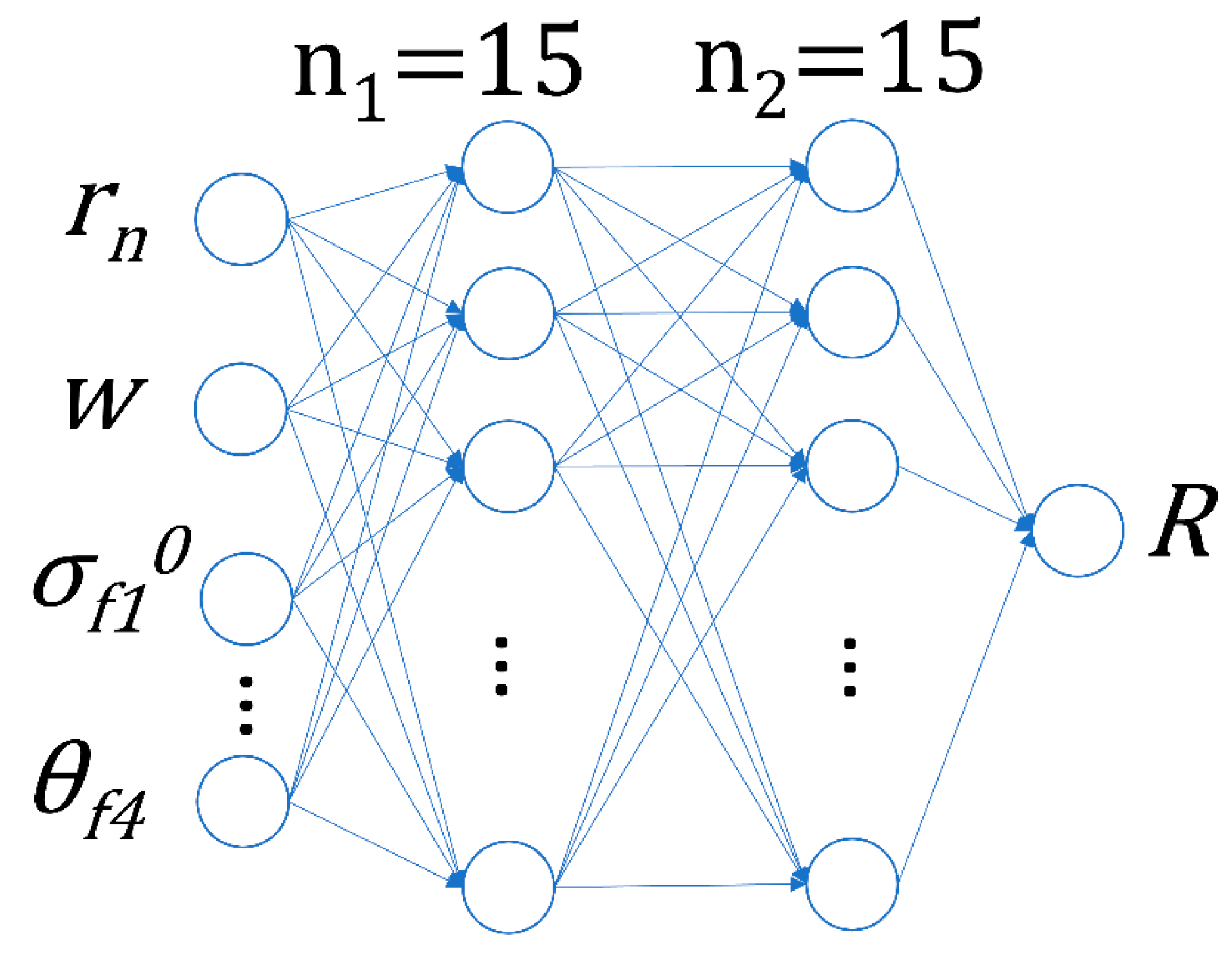
2.4. Neural Network Modeling
3. Results
3.1. Verification of Neural Network-derived Wind Speed Using ECMWF Data
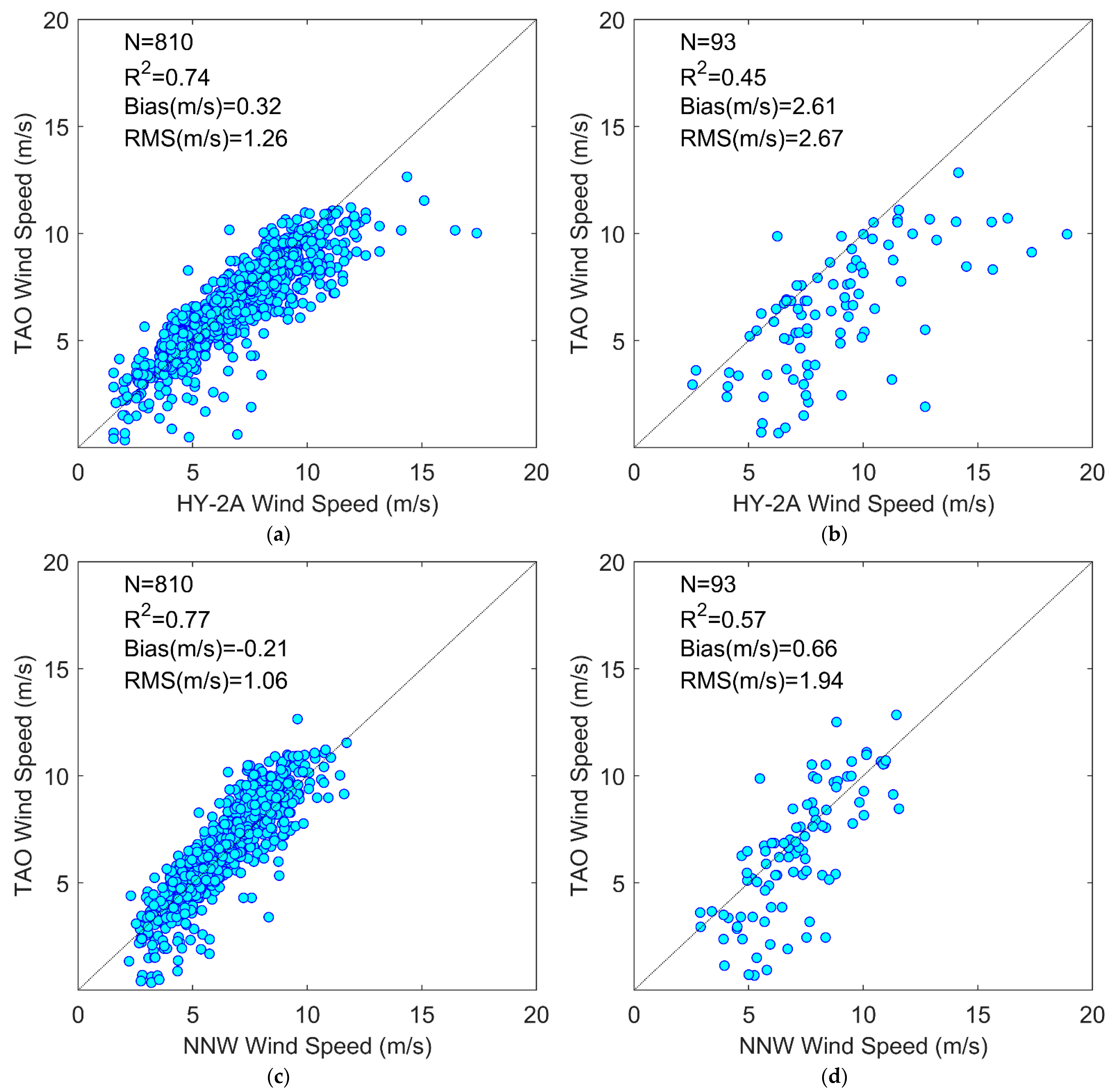
3.2. Verification of Neural Network Wind Speed Using TAO Data
3.3. Validation with TAO Linear Calibrated ECWMF Data
4. Discussion
5. Conclusions
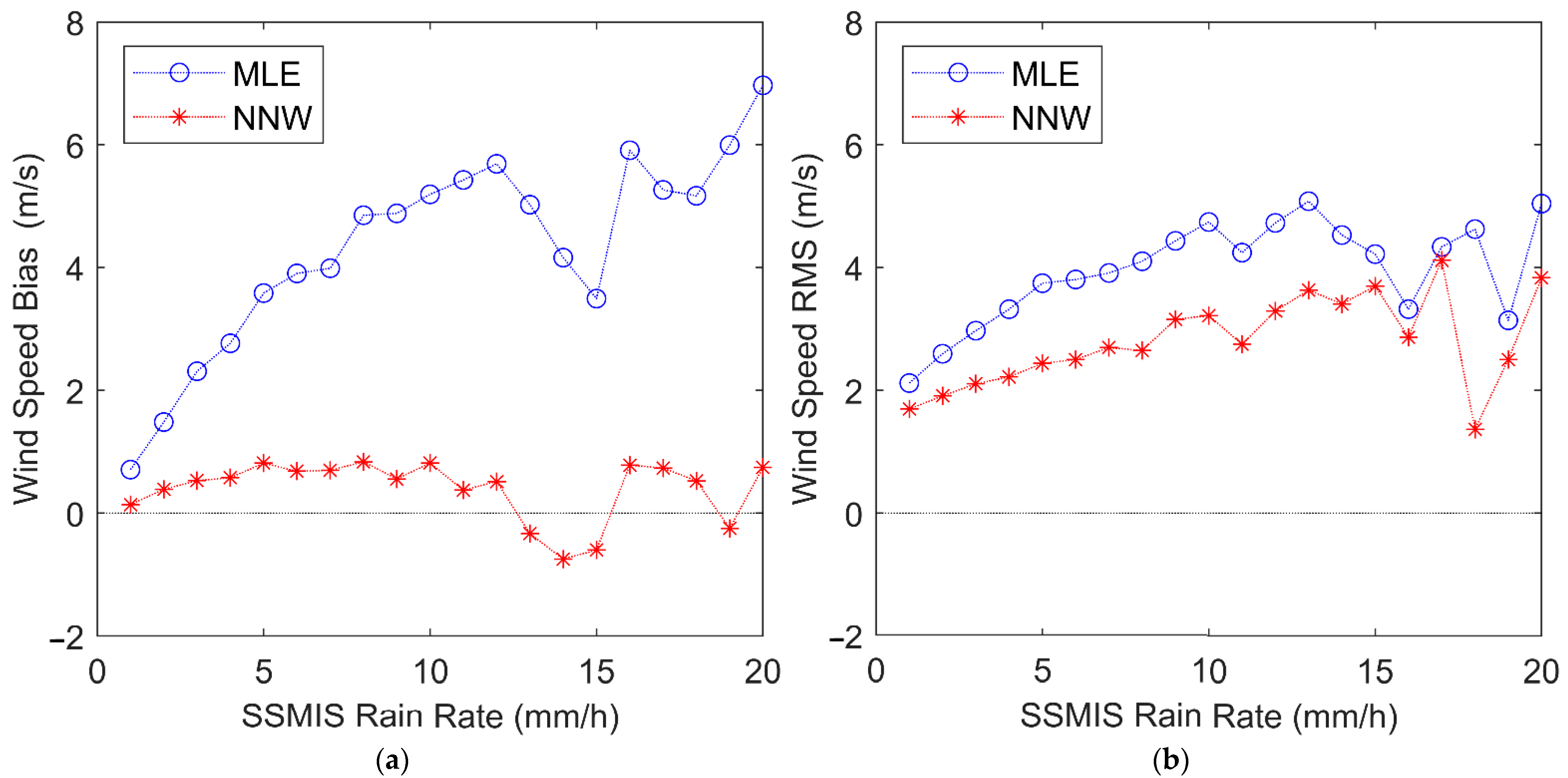
- The statistical results of the HY-2A wind speed inverted using the conventional MLE method and the ECMWF wind speed show that the HY-2A wind speed has good agreement with the ECMWF wind speed under rain-free conditions. In comparison, the rain-affected HY-2A wind speed is higher than the ECMWF wind speed, indicating that the rain contaminates the scatterometer measurements and introduces errors in the HY-2A wind speed.
- The BP neural network was used to construct wind speed retrieval models suitable for both rainy and rain-free conditions. In the validation, the ECMWF wind speed, TAO wind speed and ECMWF wind speed with TAO linear correction were used as references. The verification shows that the bias between the wind speed retrieved using the neural network model and the reference wind speed is close to zero. In the case of rain, the bias is slightly higher than that in case of the rain-free conditions. The results indicate that the wind speed retrieved using the neural network is less biased, and the wind measurement accuracy of the HY-2A scatterometer affected by rain is improved.
- In this study, due to the lack of higher wind speeds and higher rain rate data, the appropriate range for neural network fitting is 0–20 mm/h for the rain rate and 0.1–30 m/s for the wind speed. Scatterometer wind direction retrieval is also affected by rainfall. Correcting the influence of rainfall on wind direction will be one of our next research works.
- HY-2B and HY-2C are the new operational HY-2 series satellites, and the measurement accuracy of their scatterometers is higher than that of HY-2A. In the future, we will add the data from HY-2B or HY-2C to further explore the methods to improve the wind measurement accuracy of Ku-band scatterometers.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| GMF | Geophysical model function |
| WVC | Wind vector cell |
| QC | Quality control |
| NRCS | Normalized radar cross section |
| NNW | Neural network |
| MLE | Maximum likelihood estimation |
References
- Liu, W.T. Progress in Scatterometer Application. J. Oceanogr. 2002, 58, 121–136. [Google Scholar] [CrossRef]
- Chelton, D.B.; Freilich, M.H. Scatterometer-Based Assessment of 10-m Wind Analyses from the Operational ECMWF and NCEP Numerical Weather Prediction Models. Mon. Weather. Rev. 2005, 133, 409–429. [Google Scholar] [CrossRef]
- Weissman, D.E.; Bourassa, M.A.; Tongue, J. Effects of Rain Rate and Wind Magnitude on SeaWinds Scatterometer Wind Speed Errors. J. Atmos. Ocean. Technol. 2002, 19, 738–746. [Google Scholar] [CrossRef]
- Draper, D.W.; Long, D.G. Simultaneous wind and rain retrieval using SeaWinds data. EEE Trans. Geosci. Remote. Sens. 2004, 42, 1411–1423. [Google Scholar] [CrossRef]
- Weissman, D.E.; Bourassa, M.A. Measurements of the Effect of Rain-Induced Sea Surface Roughness on the QuikSCAT Scatterometer Radar Cross Section. In Proceedings of the IEEE Transactions on Geoscience and Remote Sensing, Barcelona, Spain, 23–28 July 2007. [Google Scholar]
- Verhoef, A.; Vogelzang, J.; Stoffelen, A.D. ScatSat-1 Wind Validation Report 25 km (OSI-112-a) and 50 km (OSI-112-b) Wind Products, EUMETSAT Ocean and Sea Ice Satellite Application Facility Document SAF/OSI/CDOP3/KNMI/TEC/RP/324, Version 1.0, KNMI, De Bilt, The Netherlands. 2018. Available online: https://scatterometer.knmi.nl/publications/pdf/osisaf_cdop3_ss3_valrep_scatsat1_winds.pdf (accessed on 26 January 2022).
- Xu, X.; Stoffelen, A.; Meirink, J.F. Comparison of Ocean Surface Rain Rates From the Global Precipitation Mission and the Meteosat Second-Generation Satellite for Wind Scatterometer Quality Control. IEEE JSTARS 2020, 13, 2173–2182. [Google Scholar] [CrossRef]
- Contreras, R.F.; Plant, W.J.; Keller, W.C.; Hayes, K.; Nystuen, J. Effects of rain on Ku-band backscatter from the ocean. J. Geophys. Res. 2003, 108, 3165. [Google Scholar] [CrossRef]
- Portabella, M.; Stoffelen, A. Rain Detection and Quality Control of SeaWinds. J. Atmos. Ocean. Technol. 2001, 18, 1171–1183. [Google Scholar] [CrossRef]
- Alpers, W.; Zhang, B.; Mouche, A.; Zeng, K.; Chan, P.W. Rain footprints on C- band synthetic aperture radar images of the ocean–Revisited. Remote Sens. Environ. 2016, 187, 169–185. [Google Scholar] [CrossRef]
- Moore, R.; Chaudhry, A.H.; Birrer, I. Errors in Scatterometer–Radiometer Wind Measurement Due to Rain. IEEE J. Ocean. Eng. 1983, 8, 37–49. [Google Scholar] [CrossRef]
- Quartly, G.; Srokosz, M.; Guymer, T. Understanding the effects of rain on radar altimeter waveforms. Adv. Space Res. 1998, 22, 1567–1570. [Google Scholar] [CrossRef]
- Tournadre, J. Determination of Rain Cell Characteristics from the Analysis of TOPEX Altimeter Echo Waveforms. J. Atmos. Ocean. Technol. 1998, 15, 387–406. [Google Scholar] [CrossRef]
- Tournadre, J.; Quilfen, Y. Impact of rain cell on scatterometer data: 1. Theory and modeling. J. Geophys. Res. Atmos. 2003, 108, 3225–3243. [Google Scholar] [CrossRef]
- Tournadre, J.; Quilfen, Y. Impact of rain cell on scatterometer data: 2. Correction of Seawinds measured backscatter and wind and rain flagging. J. Geophys. Res. Ocean. 2005, 110, 7023–7039. [Google Scholar] [CrossRef]
- Portabella, M.; Stoffelen, A.; Lin, W.; Turiel, A.; Verhoef, A.; Verspeek, J.; Poy, J. Rain Effects on ASCAT-Retrieved Winds: Toward an Improved Quality Control. IEEE Trans. Geosci. Remote Sens. 2012, 50, 2495–2506. [Google Scholar] [CrossRef]
- Xu, X.; Stoffelen, A. Improved Rain Screening for Ku-Band Wind Scatterometry. IEEE Trans. Geosci. Remote Sens. 2020, 58, 2494–2503. [Google Scholar] [CrossRef]
- Huddleston, J.; Stiles, B. A multidimensional histogram rain-flagging technique for SeaWinds on QuikSCAT. In Proceedings of the 2000 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 24–28 July 2000. [Google Scholar]
- Ahmad, K.; Jones, W.; Kasparis, T. Oceanic Rainfall Retrievals using passive and active measurements from SeaWinds Remote Sensor. In Proceedings of the 2007 IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–27 July 2007. [Google Scholar]
- Moore, R.; Braaten, D.; Natarajakumar, B.; Kurisunkal, V.J. Correcting scatterometer ocean measurements for rain effects using radiometer data: Application to SeaWinds on ADEOS-2. In Proceedings of the 2003 IEEE International Geoscience and Remote Sensing Symposium, Toulouse, France, 21–25 July 2003. [Google Scholar]
- Hilburn, K.; Wentz, F.; Smith, D.; Ashcroft, P. Correcting active scatterometer data for the effects of rain using passive mi-crowave data. J. Appl. Meteorol. Clim. 2006, 45, 382–398. [Google Scholar] [CrossRef]
- Draper, D.; Long, D. Evaluating the effect of rain on SeaWinds scatterometer measurements. J. Geophys. Res 2004, 109. [Google Scholar] [CrossRef]
- Stiles, B.; Yueh, S. Impact of rain on spaceborne Ku-band wind scatterometer data. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1973–1983. [Google Scholar] [CrossRef]
- Stiles, B.; Dunbar, R. A Neural Network Technique for Improving the Accuracy of Scatterometer Winds in Rainy Conditions. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3114–3122. [Google Scholar] [CrossRef]
- Verhoef, A.; Vogelzang, J.; Verspeek, J.; Stoffelen, A. AWDP User Manual and Reference Guide, NWPSAF-KN-UD-005, version 2.0; EU-METSAT: Darmstadt, Germany, 2010. [Google Scholar]
- Lin, W.; Portabella, M.; Stoffelen, A.; Turiel, A.; Verhoef, A. Rain Identification in ASCAT Winds Using Singularity Analysis. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1519–1523. [Google Scholar] [CrossRef]
- Stoffelen, A.; Anderson, D. Scatterometer data interpretation: Measurement space and inversion. J. Atmos. Ocean. Technol 1997, 14, 1298–1313. [Google Scholar] [CrossRef]
- Figa, J.; Stoffelen, A. On the assimilation of Ku-band scatterometer winds for weather analysis and forecasting. IEEE Trans. Geosci. Remote Sens. 2000, 38, 1893–1902. [Google Scholar] [CrossRef]
- Wang, Z.X.; Stoffelen, A.; Zhang, B.; He, Y.J.; Lin, W.M.; Li, X.Z. Inconsistencies in scatterometer wind products based on ASCAT and OSCAT-2 collocations. Remote Sens. Environ. 2019, 225, 207–216. [Google Scholar] [CrossRef]
- Verhoef, A.; Vogelzang, J.; Verspeek, J.; Stoffelen, A. PenWP User Manual and Reference Guide, EUMETSAT NWP Satellite Application Facility Document NWPSAF-KN-UD-009, Version 2.2, KNMI, De Bilt, The Netherlands. 2018. Available online: https://nwpsaf.eumetsat.int/site/download/documentation/scatterometer/penwp/NWPSAF-KN-UD009_PenWP_User_Guide_v2.2.pdf (accessed on 10 October 2021).
- Badran, F.; Thiria, S.; Crepon, M. Wind ambiguity removal by the use of neural network techniques. J. Geophys. Res. Ocean. 1991, 96, 20521–20529. [Google Scholar] [CrossRef]
- Reichstein, M.; Camps-Valls, G.; Stevens, B. Deep learning and process understanding for data-driven Earth system science. Nature 2019, 566, 195–204. [Google Scholar] [CrossRef]
- Mejia, C.; Thiria, S.; Tran, N.; Crépon, M.; Badran, F. Determination of the geophysical model function of the ERS-1 scat-terometer by the use of neural networks. J. Geophys. Res 1998, 103, 12853–12868. [Google Scholar] [CrossRef]
- Jones, W.L.; Park, J.D.; Donnelly, W.J.; Carswell, J.R.; Mclntosh, R.E.; Zec, J.; Yueh, S. An improved NASA Scatterometer ge-ophysical model function for tropical cyclones. In Proceedings of the 1998 IEEE International Geoscience and Remote Sensing. Symposium Proceedings, Seattle, WA, USA, 6–10 July 1998. [Google Scholar] [CrossRef]
- Richaume, P.; Badran, F.; Crepon, M.; Mejía, C.; Roquet, H.; Thiria, S. Neural network wind retrieval from ERS-1 scatterometer data. J. Geophys. Res 2000, 105, 8737–8751. [Google Scholar] [CrossRef]
- Lin, M.S.; Song, X.X.; Jiang, X.W. Neural network wind retrieval from ERS-1/2 scatterometer data. Acta Oceanol. Sin.-Engl. Ed. 2006, 25, 35–39. [Google Scholar]
- Xu, X.; Stoffelen, A. Wind Retrieval for Cfoscat Edge and Nadir Observations Based on Neural Networks and Improved Principle Component Analysis. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019. [Google Scholar] [CrossRef]
- Xie, X.T.; Wang, J.; Lin, M.S. A Neural Network-Based Rain Effect Correction Method for HY-2A Scatterometer Backscatter Measurements. Remote Sens. 2020, 12, 1648. [Google Scholar] [CrossRef]
- Rivas, M.B.; Stoffelen, A. Characterizing ERA-Interim and ERA5 surface wind biases using ASCAT. Ocean Sci 2019, 15, 831–852. [Google Scholar] [CrossRef]
- Thomas, B.R.; Kent, E.C.; Swail, V.R. Methods to homogenize wind speeds from ships and buoys. Int. J. Climatol. 2005, 25, 979–995. [Google Scholar] [CrossRef]
- Fang, P.; Zhao, B.; Zeng, Z.; Yu, H.; Lei, X.; Tan, J. Effects of wind direction on variations in friction velocity with wind speed under conditions of strong onshore wind. J. Geophys. Res. Atmos. 2018, 123, 7340–7353. [Google Scholar] [CrossRef]
- Bentamy, A.; Croize-Fillon, D.; Perigaud, C. Characterization of ASCAT measurements based on buoy and QuikSCAT wind vector observations. Ocean Sci. 2008, 4, 265–274. [Google Scholar] [CrossRef]
- Picaut, J.; Hackert, E.; Busalacchi, A.J.; Murtugudde, R.; Lagerloef, G.S.E. Mechanisms of the 1997–1998 El Niño–La Niña, as inferred from space-based observations. J. Geophys. Res. 2002, 107, 5-1–5-18. [Google Scholar] [CrossRef]
- Zou, J.; Xie, X.; Yi, Z.; Lin, M. Wind Retrieval Processing for HY-2A Microwave Scatterometer. In Proceedings of the 2014 IEEE International Geo-science and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014. [Google Scholar]
- Freilich, M.H. SeaWinds Algorithm Theoretical Basis Document. NASA JPL, Los Angeles, CA, USA, Tech. Rep. NASA ATBD-SWS-01. 1999. Available online: https://ntrs.nasa.gov/api/citations/20160003317/downloads/20160003317.pdf (accessed on 19 May 2022).
- Hersbach, H.; Stoffelen, A.; Haan, S. An improved C-band scatterometer ocean geophysical model function: CMOD5. J. Geophys. Res. Ocean. 2007, 112, 3006–3024. [Google Scholar] [CrossRef]
- Wentz, F.J.; Smith, D.K. A model function for the ocean-normalized radar cross section at 14 GHz derived from NSCAT ob-servations. J. Geophys. Res 1999, 104, 11499–11514. [Google Scholar] [CrossRef]
- Stoffelen, A.; Verspeek, J.; Vogelzang, J.; Verhoef, A. The CMOD7 geophysical model function for ASCAT and ERS wind retrievals. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 2123–2134. [Google Scholar] [CrossRef]
- Lin, W.; Portabella, M.; Stoffelen, A.; Verhoef, A.; Wang, Z. Validation of the NSCAT-5 Geophysical Model Function for Scatsat-1 Wind Scatterometer. In Proceedings of the 2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018. [Google Scholar]
- Portabella, M.; Stoffelen, A. A probabilistic approach for SeaWinds data assimilation. Q. J. Roy. Meteor. Soc 2004, 130, 127–152. [Google Scholar] [CrossRef]












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Xie, X.; Deng, R.; Lin, M.; Yang, X. Neural Network-Based Wind Measurements in Rainy Conditions Using the HY-2A Scatterometer. Remote Sens. 2023, 15, 4357. https://doi.org/10.3390/rs15174357
Wang J, Xie X, Deng R, Lin M, Yang X. Neural Network-Based Wind Measurements in Rainy Conditions Using the HY-2A Scatterometer. Remote Sensing. 2023; 15(17):4357. https://doi.org/10.3390/rs15174357
Chicago/Turabian StyleWang, Jing, Xuetong Xie, Ruru Deng, Mingsen Lin, and Xiankun Yang. 2023. "Neural Network-Based Wind Measurements in Rainy Conditions Using the HY-2A Scatterometer" Remote Sensing 15, no. 17: 4357. https://doi.org/10.3390/rs15174357
APA StyleWang, J., Xie, X., Deng, R., Lin, M., & Yang, X. (2023). Neural Network-Based Wind Measurements in Rainy Conditions Using the HY-2A Scatterometer. Remote Sensing, 15(17), 4357. https://doi.org/10.3390/rs15174357