
Construction and Analysis of the EMC Evaluation Model for Vehicular Communication Systems Based on Digital Maps


Abstract
:1. Introduction
2. EMI Theoretical Mechanism
3. Construction of the Model
3.1. Level 1 Evaluation: Working Environment
3.2. Level 2 Evaluation: Signal Spectrum
3.3. Level 3 Evaluation: Receiver Sensitivity
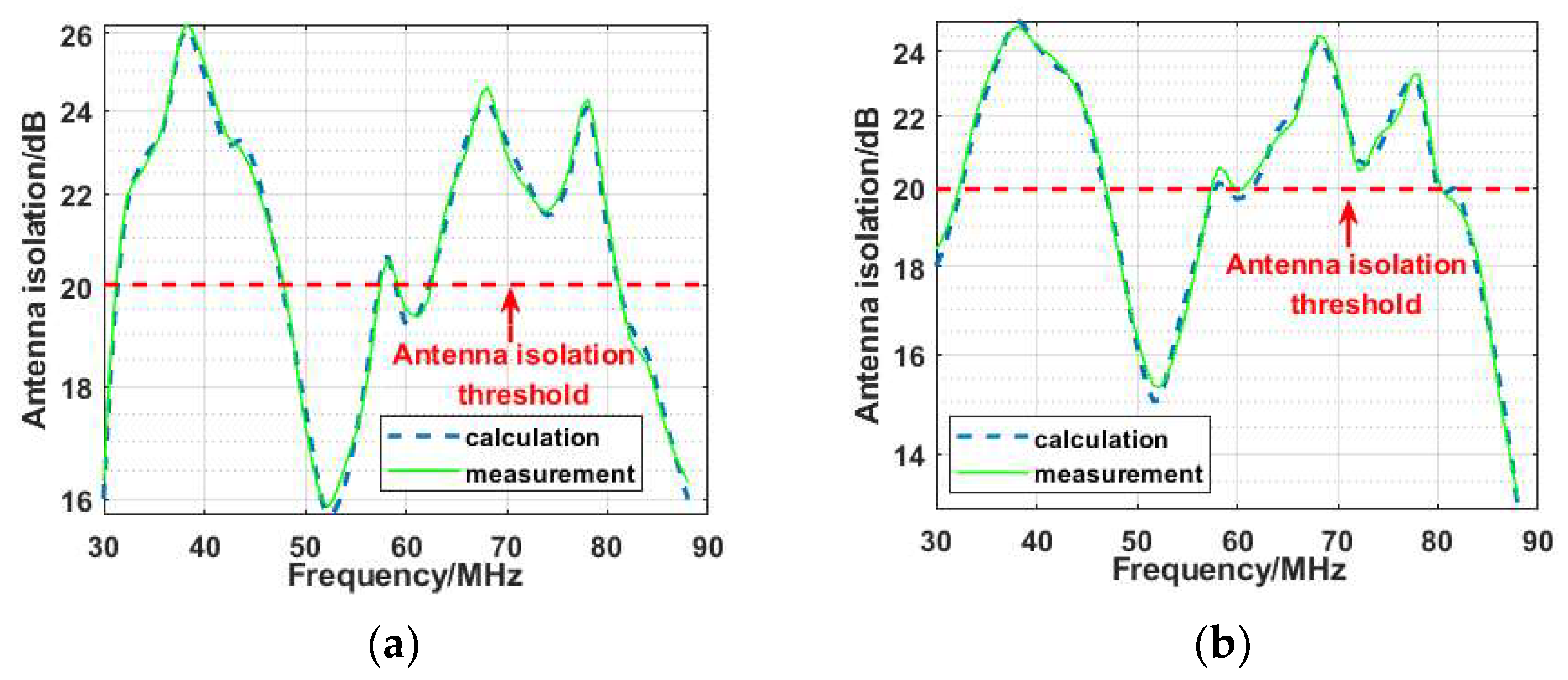
3.4. Level 4 Evaluation: Antenna Isolation
3.5. Level 5 Evaluation: Communication Performance
3.5.1. Communication Distance
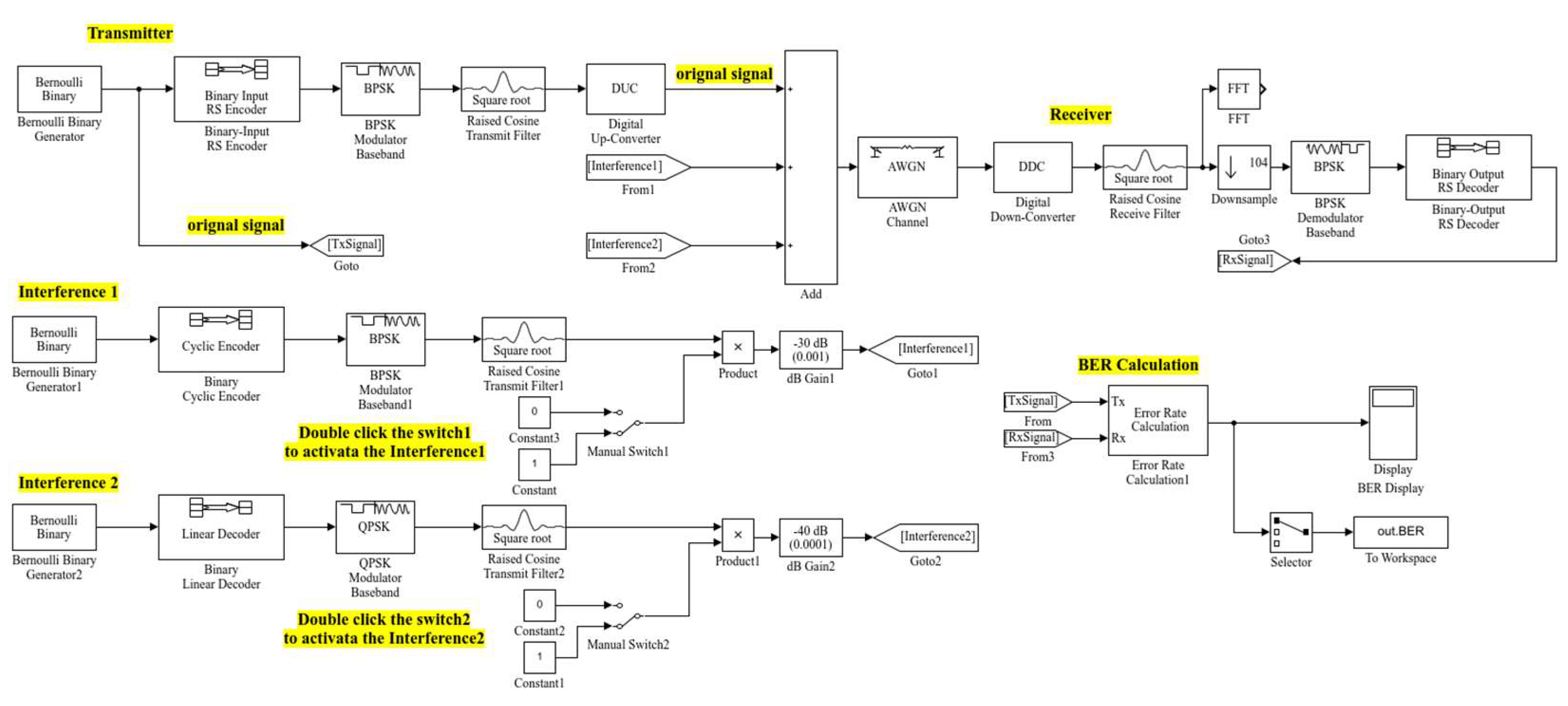
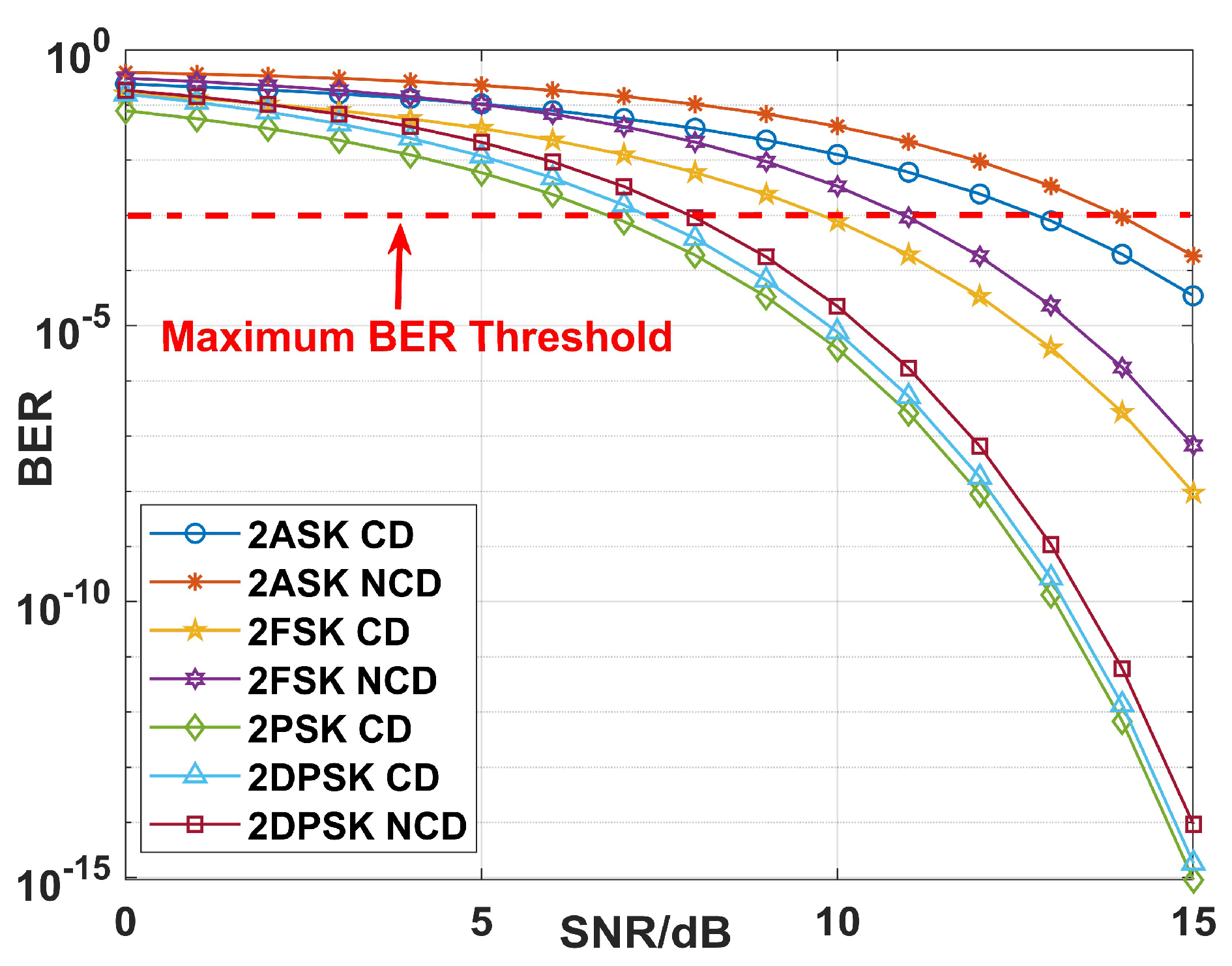
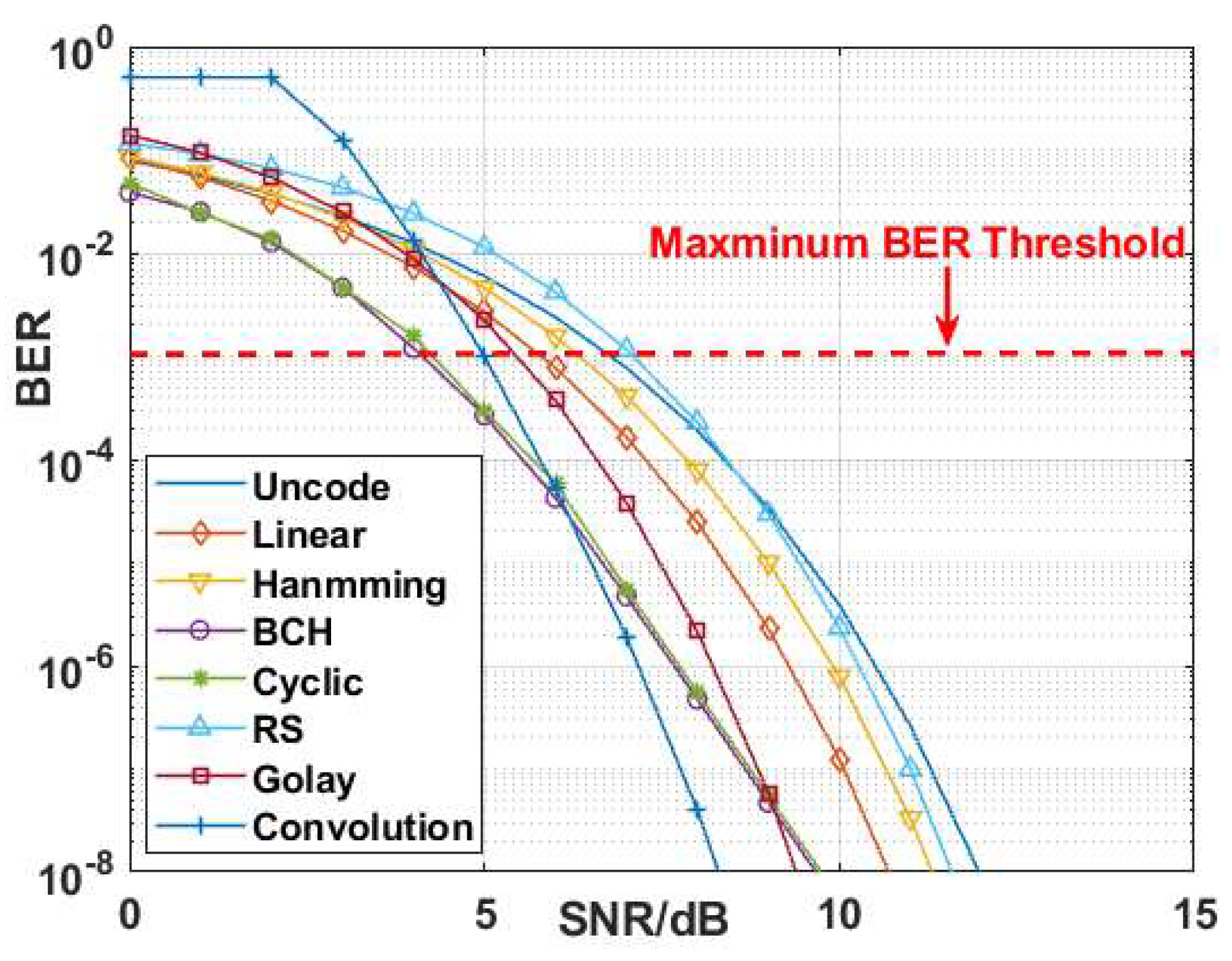
3.5.2. Communication Quality
4. Application of the Model
4.1. Level 1 Evaluation: Work Environment
4.2. Level 2 Evaluation: Signal Spectrum
4.3. Level 3 Evaluation: Sensitivity of the Receiver
4.4. Level 4 Evaluation: Antenna isolation
4.5. Level 5 Evaluation: Communication Performance
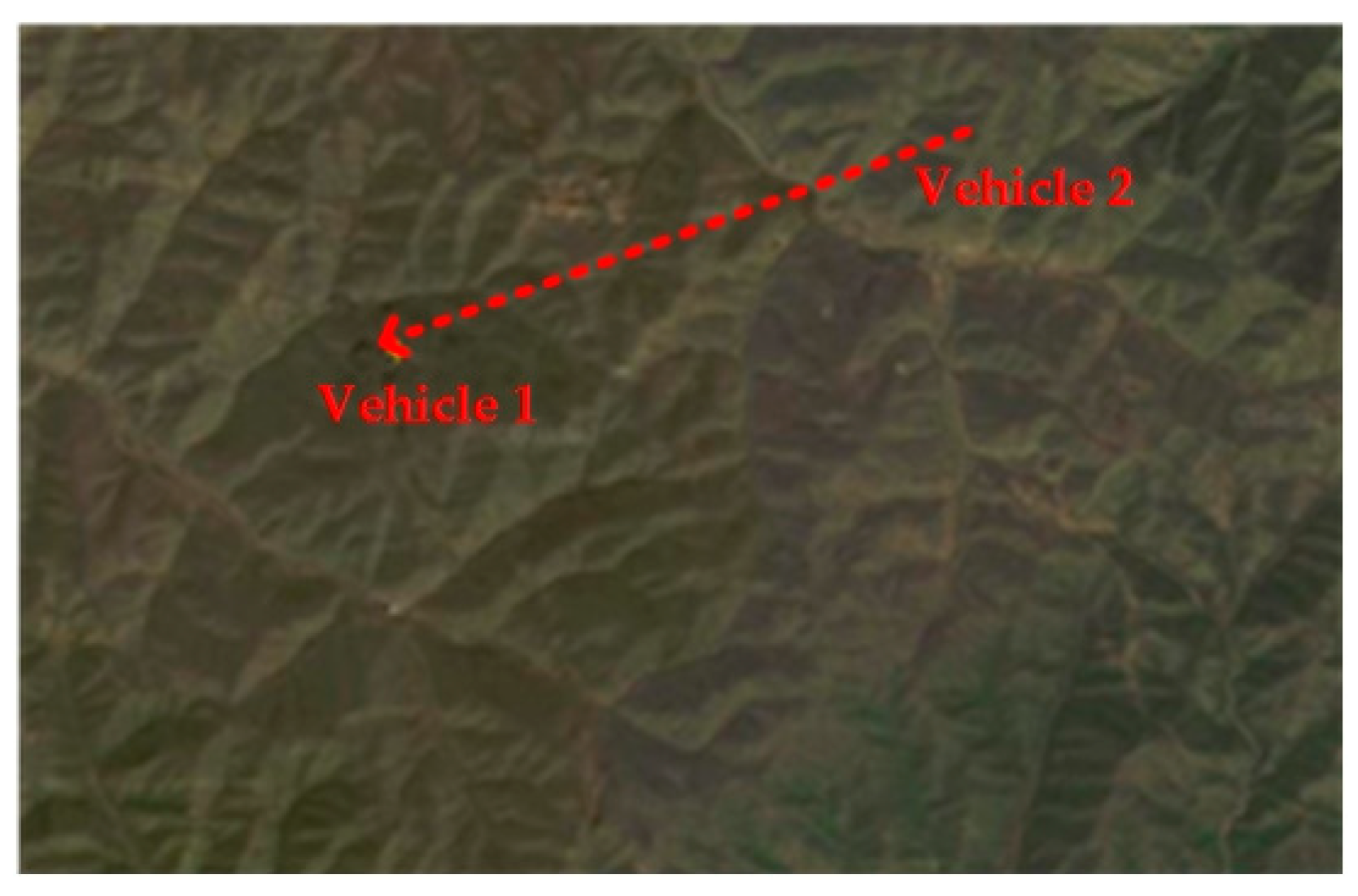
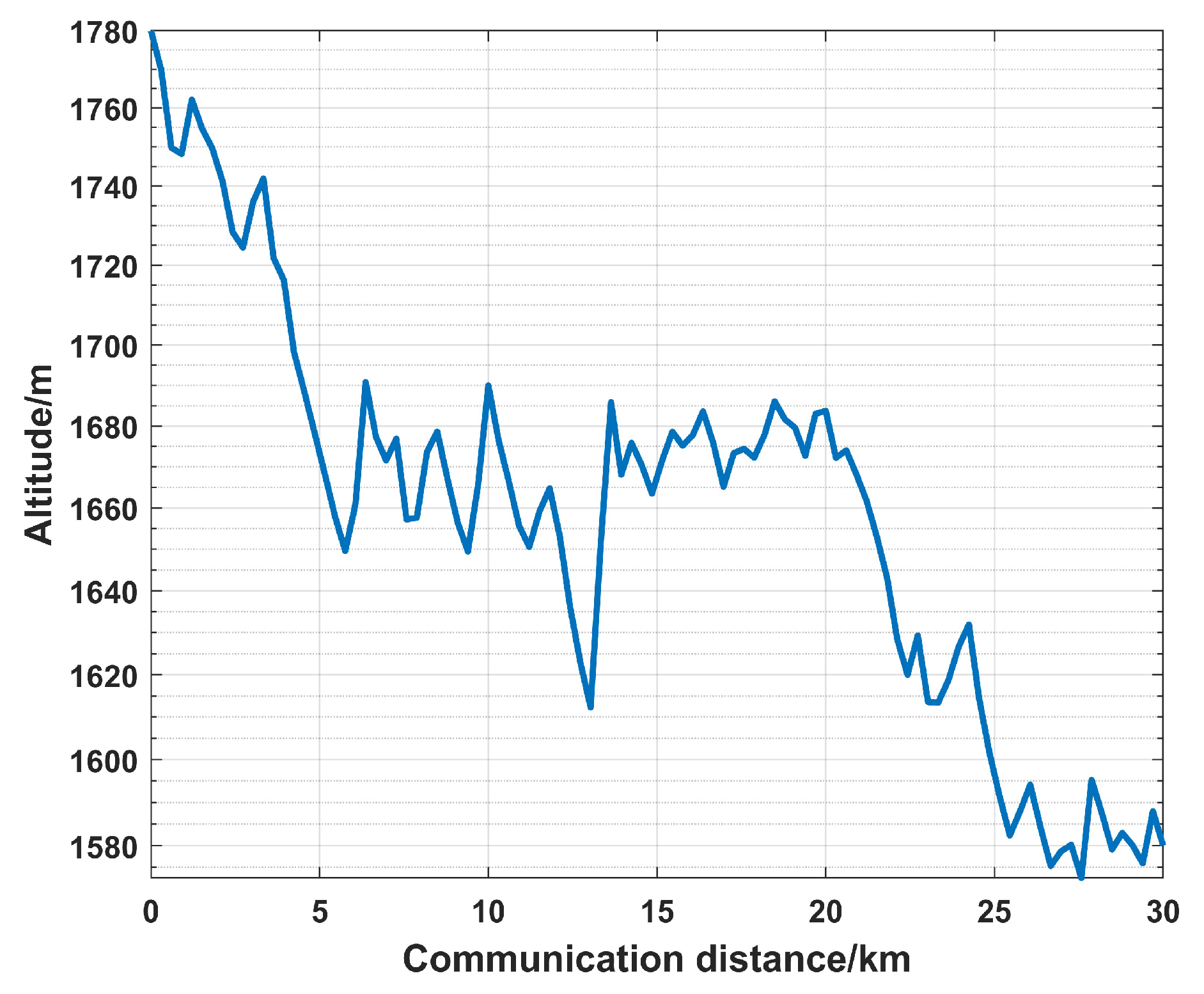
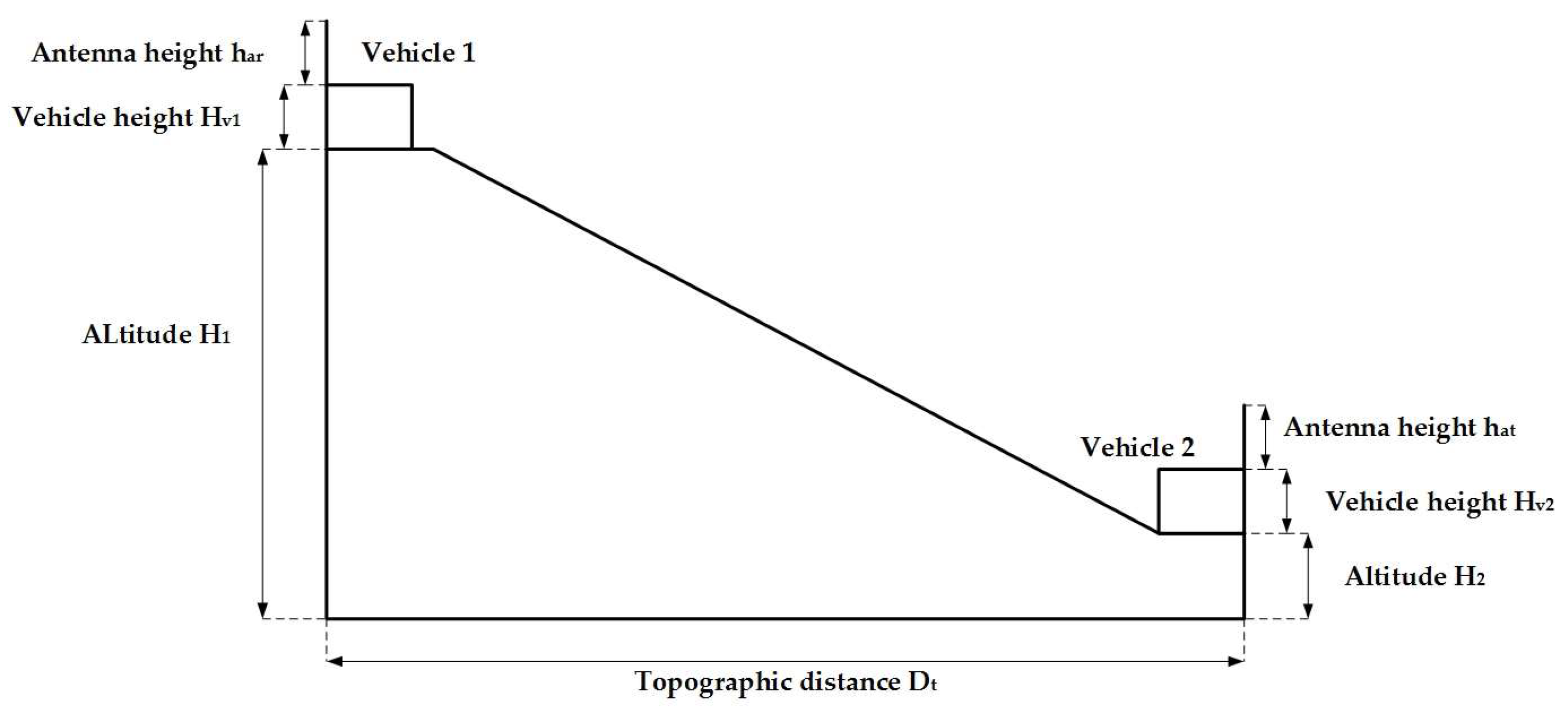
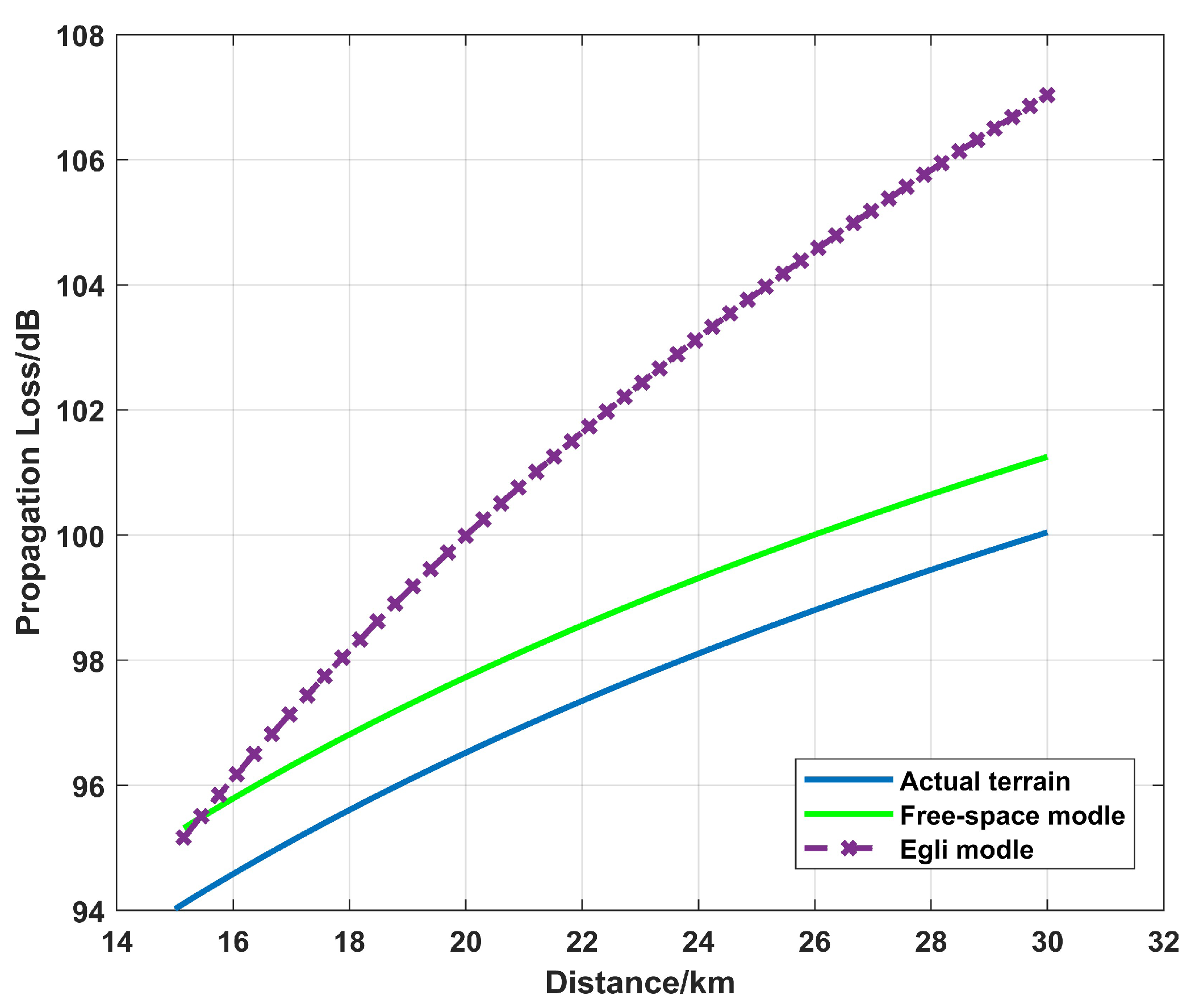
4.5.1. Communication Distance
4.5.2. Communication Quality
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Aiello, O.; Crovetti, P. Characterization of the Susceptibility to EMI of a BMS IC for Electric Vehicles by Direct Power and Bulk Current Injection. IEEE Lett. Electromagn. Compat. Pract. Appl. 2021, 3, 101–107. [Google Scholar] [CrossRef]
- Wang, K.; Lu, H.; Chen, C.; Xiong, Y. Modeling of System-Level Conducted EMI of the High-Voltage Electric Drive System in Electric Vehicles. IEEE Trans. Electromagn. Compat. 2022, 64, 741–749. [Google Scholar] [CrossRef]
- Wang, K.; Lu, H.; Li, X. High-Frequency Modeling of the High-Voltage Electric Drive System for Conducted EMI Simulation in Electric Vehicles. IEEE Trans. Transp. Electrif. 2023, 9, 2808–2819. [Google Scholar] [CrossRef]
- Gajbhiye, P.; Achari, K.N.; Balakrishna, G.; Kumar, M.V. An Approach to Mitigate the EMI Noise Effect in Vehicle-to-Grid (V2G) System. In Proceedings of the 2021 2nd Global Conference for Advancement in Technology (GCAT), Bangalore, India, 1–3 October 2021; pp. 1–6. [Google Scholar]
- Qian, W.; Yang, Y.; Peng, J.; Cao, H.; Li, X.; Gao, Y.; Lei, J. EMI Modeling for Vehicle Body using Characteristic Mode Analysis. In Proceedings of the 2022 Asia-Pacific International Symposium on Electromagnetic Compatibility (APEMC), Beijing, China, 1–4 September 2022; pp. 732–734. [Google Scholar]
- Qian, W.; Yang, Y.; Peng, J.; Cao, H.; Li, X.; Gao, Y.; Lei, J. Vehicle electromagnetic interference suppression using characteristic mode analysis. In Proceedings of the 2022 Asia-Pacific International Symposium on Electromagnetic Compatibility (APEMC), Beijing, China, 1–4 September 2022; pp. 427–429. [Google Scholar]
- Mutoh, N.; Nakanishi, M.; Kanesaki, M.; Nakashima, J. EMI noise control methods suitable for electric vehicle drive systems. IEEE Trans. Electromagn. Compat. 2005, 47, 930–937. [Google Scholar] [CrossRef]
- Pliakostathis, K. Research on EMI from Modern Electric Vehicles and their Recharging Systems. In Proceedings of the 2020 International Symposium on Electromagnetic Compatibility-EMC EUROPE, Rome, Italy, 23–25 September 2020; pp. 1–6. [Google Scholar]
- Jiang, L.; Liu, H.; Zhang, X. Analysis on EMC influencing factors of electric vehicle wireless charging system. In Proceedings of the 2021 IEEE International Joint EMC/SI/PI and EMC Europe Symposium, Raleigh, NC, USA, 26 July–13 August 2021; pp. 285–290. [Google Scholar]
- Alcaras, A. EMC Performances of a Land Army Vehicle to Respect Integrated Radios Reception Sensitivity: Typical Performances Needed for “Fitted for Radio (FFR)” Land Vehicle. In Proceedings of the 2018 International Symposium on Electromagnetic Compatibility (EMC EUROPE), Amsterdam, The Netherlands, 27–30 August 2018; pp. 303–308. [Google Scholar]
- Gkatsi, V.; Vogt-Ardatjew, R.; Leferink, F. Risk-based EMC System Analysis Platform of Automotive Environments. In Proceedings of the 2021 IEEE International Joint EMC/SI/PI and EMC Europe Symposium, Raleigh, NC, USA, 26 July–13 August 2021; pp. 749–754. [Google Scholar]
- Zhao, T.; Liu, X.; Sun, P.; An, M.; Mu, X. EMC Vehicle-Level Layout Design for Railway Vehicles in Complex Electromagnetic Environment. In Proceedings of the 2021 11th International Conference on Information Technology in Medicine and Education (ITME), Wuyishan, China, 19–21 November 2021; pp. 231–236. [Google Scholar]
- Hein, J.; Hippeli, J.; Eibert, T.F. Efficient EMC Parameter Analysis for the Verification of Complex Automotive Simulation Models by the Utilization of Design of Experiments. IEEE Trans. Electromagn. Compat. 2018, 60, 1965–1973. [Google Scholar] [CrossRef]
- Isaacs, J.; Mcnair, T.; Momson, R. A program for analyzing co-site interferences. In Proceedings of the 1992 International Conference on Tactical Communications, Fort Wayne, IN, USA, 28–30 April 1992; pp. 119–124. [Google Scholar]
- Chen, H.; Wang, G. Research of frequency assignment based on genetic algorithm. In Proceedings of the 2009 3rd IEEE International Symposium on Microwave, Antenna, Propagation and EMC Technologies for Wireless Communications, Beijing, China, 27–29 October 2009; pp. 199–202. [Google Scholar]
- Baldwin, T.E.; Capraro, G.T. Intrasystem electromagnetic compatibility program (IEMCAP). IEEE Trans. Electromagn. Compat. 1980, 22, 224–228. [Google Scholar] [CrossRef]
- Duff, W.G.; Foster, J.J. Nonlinear effects models for the intrasystem electromagnetic compatibility analysis program (IEMCAP). In Proceedings of the 1981 IEEE International Symposium on Electromagnetic Compatibility, Boulder, CO, USA, 18–20 August 1981; pp. 238–245. [Google Scholar]
- Hilbert, A.L. An overview of the air force intrasystem analysis program (IAP). In Proceedings of the 1975 IEEE International Symposium on Electromagnetic Compatibility, San Antonio, TX, USA, 7–9 October 1975; pp. 1–3. [Google Scholar]
- Zhou, P.; Lv, Y.; Chen, Z.; Xu, H. System-level EMC assessment for military vehicular communication systems based on a modified four-level assessment model. China Commun. 2018, 15, 39–53. [Google Scholar] [CrossRef]
- Violette, N.J.L.; Write, R.J.; Violette, M.F. Electromagnetic Compatibility Handbook; Van Norstrand Reinhold Company Inc.: New York, NY, USA, 1987. [Google Scholar]
- Wang, C.; Wen, C.; Cheng, M.; Liu, M.Z.; Li, X. LiDAR-based localization using universal encoding and memory-aware regression. Pattern Recognit. 2022, 128, 108685. [Google Scholar]
- Yu, S.; Wang, C.; Lin, Y.; Wen, C.; Cheng, M.; Hu, G. STCLoc: Deep LiDAR Localization With Spatio-Temporal Constraints. IEEE Trans. Intell. Transp. Syst. 2023, 24, 489–500. [Google Scholar] [CrossRef]
- Yu, S.; Wang, C.; Yu, Z.; Li, X.; Cheng, M.; Zang, Y. Deep regression for LiDAR-based localization in dense urban areas. ISPRS J. Photogramm. Remote Sens. 2021, 172, 240–252. [Google Scholar] [CrossRef]
- Li, W.; Yu, S.; Wang, C.; Hu, G.; Shen, S.; Wen, C. SGLoc: Scene Geometry Encoding for Outdoor LiDAR Localization. In Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Vancouver, BC, Canada, 17–24 June 2023. [Google Scholar]
- Li, H.; He, W.; He, X. Prediction of Radio Wave Propagation Loss in Ultra-Rugged Terrain Areas. IEEE Trans. Antennas Propag. 2021, 69, 4768–4780. [Google Scholar] [CrossRef]
- Kvicera, M.; Pechac, P.; Valtr, P. Influence of Input Terrain Profile Resolution on Diffraction Modeling. IEEE Antennas Wirel. Propag. Lett. 2014, 14, 1318–1321. [Google Scholar] [CrossRef]
- Sunarya, I.M.G.; Al Affan, M.R.; Kurniawan, A.; Yuniarno, E.M. Digital Map Based on Unmanned Aerial Vehicle. In Proceedings of the 2020 International Conference on Computer Engineering, Network, and Intelligent Multimedia (CENIM), Surabaya, Indonesia, 17–18 November 2020; pp. 211–216. [Google Scholar]
- Zhu, Q.; Jiang, S.; Wang, C.-X.; Hua, B.; Mao, K.; Chen, X.; Zhong, W. Effects of Digital Map on the RT-based Channel Model for UAV mmWave Communications. In Proceedings of the 2020 International Wireless Communications and Mobile Computing (IWCMC), Limassol, Cyprus, 15–19 June 2020; pp. 1648–1653. [Google Scholar]
- Genender, E.; Garbe, H.; Sabath, F. Probabilistic risk analysis technique of intentional electromagnetic interference at system level. IEEE Trans. Electromagn. Compat. 2014, 56, 200–207. [Google Scholar] [CrossRef]
- Agili, S.S.; Ishii, T.K. Electromagnetic compatibility of PSK-OOK digital fiber communications. IEEE Trans. Electromagn. Compat. 2014, 56, 1322–1325. [Google Scholar] [CrossRef]
- Manzi, G.; Feliziani, M.; Beeckman, P.A.; van Dijk, N. Coexistence between ultra-wideband radio and narrow-band wireless LAN communication systems-part II: EMI evaluation. IEEE Trans. Electromagn. Compat. 2009, 51, 382–390. [Google Scholar] [CrossRef]
- Songbai, H.; Mingyu, L.; Hongmin, D.; Juebang, Y. Analysis of CDMA RF channel nonlinear distortion. In Proceedings of the International Conference on Communication Circuits and Systems, Chengdu, China, 29 June–1 July 2002; pp. 474–477. [Google Scholar]
- Tait, G.B.; Richardson, R.E.; Slocum, M.B.; Hatfield, M.O. Time-Dependent Model of RF energy propagation in coupled reverberant cavities. IEEE Trans. Electromagn. Compat. 2011, 53, 846–849. [Google Scholar] [CrossRef]
- Malmstrom, J.; Frid, H.; Jonsson, B.L.G. Approximate methods to determine the isolation between antennas on vehicles. In Proceedings of the 2016 IEEE International Symposium on Antennas and Propagation (APSURSI), Fajardo, PR, USA, 26 June–1 July 2016; pp. 131–132. [Google Scholar]
- Kolodziej, K.E.; Perry, B.T. Vehicle-mounted STAR antenna isolation performance. In Proceedings of the 2015 IEEE International Symposium on Antennas and Propagation & USNC/URSI National Radio Science Meeting, Vancouver, BC, Canada, 19–24 July 2015; pp. 1602–1603. [Google Scholar]
- Popovici, A.C. Fast measurement of bit error rate and error probability estimation in digital communication systems. In Proceedings of the IEEE GLOBECOM, Sydney, NSW, Australia, 8–12 November 1998; Volume 5, pp. 2736–2739. [Google Scholar]
- Hsiao, H.-F.; Lin, S.-G.; Su, S.-H.; Tu, C.H.; Chang, D.C.; Juang, Y.Z.; Chiou, H.K. Bit error rate measurement system for RF integrated circuits. In Proceedings of the 2012 IEEE International Instrumentation and Measurement Technology Conference Proceedings, Graz, Austria, 13–16 May 2012; pp. 2381–2384. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Formula | Signal Component |
|---|---|
| original signal | |
| fundamental wave | |
| second-order intermediation | |
| second-order harmonic wave | |
| third-order intermediation | |
| third-order intermediation | |
| third-order harmonic wave |
| IM | Potential EMI | EMC |
|---|---|---|
| >0 | Present | incompatibility |
| =0 | Uncertain | critical compatibility |
| <0 | Absent | compatibility |
| Transmitting Antenna | Horizontal Polarization | Vertical Polarization | Circular Polarization | |||
|---|---|---|---|---|---|---|
| Receiving Antenna | ||||||
| Horizontal Polarization | 0 | 0 | −16 | −16 | −3 | |
| 0 | 0 | −16 | −20 | −3 | ||
| Vertical Polarization | −16 | −16 | 0 | 0 | −3 | |
| −16 | −20 | 0 | 0 | −3 | ||
| Circular Polarization | −3 | 3 | −3 | −3 | 0 | |
| Modulation Types | Coherent Modulation | Noncoherent Modulation |
|---|---|---|
| 2ASK | ||
| 2FSK | ||
| 2PSK | / | |
| 2DPSK |
| No. 1. Shortwave Radio Station (HF1) | No. 2. Ultra-Shortwave Radio Station (VHF2) | ||
| Working state | Transmitting | Working state | Transmitting |
| Working frequency (MHZ) | 15 | Working frequency (MHZ) | 45 |
| Transmission power (W) | 50 | Transmission power (W) | 50 |
| Bandwidth (MHZ) | 3 | Bandwidth (MHZ) | 10 |
| VSWR | 1.5 | VSWR | 1.5 |
| Antenna gain (dB) | 1 | Antenna gain (dB) | 1 |
| Antenna polarization | Vertical polarization | Antenna polarization | Horizontal polarization |
| No. 3. Ultra-Shortwave Radio Station (VHF3) | Vehicular Performance Indicator | ||
| Working state | Receiving | Communication distance (km) | 15–30 |
| Working frequency (MHZ) | 53 | Antenna isolation (dB) | ≥20 |
| Sensitivity (dBm) | −116 | Decrease in receiver sensitivity (dB) | ≤6 |
| Bandwidth (MHZ) | 15 | Vehicular height (m) | 3 |
| VSWR | 1.5 | Antenna height (m) | 2.5 |
| Antenna gain (dB) | 1 | ||
| Antenna polarization | Vertical polarization | ||
| No. 4. Ultra-Shortwave Radio Station (VHF4) | No. 5. Shortwave Radio Station (HF5) | ||
| Working state | Transmitting | Working state | Receiving |
| Working frequency (MHZ) | 80 | Working frequency (MHZ) | 11 |
| Transmission power (W) | 50 | Sensitivity (dBm) | −107 |
| Bandwidth (MHZ) | 17 | Bandwidth (MHZ) | 3 |
| VSWR | 1.5 | VSWR | 1.5 |
| Antenna gain (dB) | 1 | Antenna gain (dB) | 1 |
| Antenna polarization | Vertical polarization | Antenna polarization | Vertical polarization |
| Vehicular Performance Indicator | |||
| Vehicular height (m) | 3 | ||
| Antenna height (m) | 2.5 | ||
| Device Set | FIM | TIM | RIM | SIM |
|---|---|---|---|---|
| HF1 and VHF3 | Absent | Present | Present | Present |
| VHF2 and VHF3 | Present | Present | Present | Present |
| Device Set | Fundamental Wave Interference | High-Order Harmonic Wave Interference | High-Order Intermediation Interference |
|---|---|---|---|
| HF1 and VHF3 | Absent | Present | / |
| VHF2 and VHF3 | Present | Absent | / |
| HF1,VHF2 and VHF3 | / | / | Present |
| D (km) | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 |
| Actual received power (dBm) | −123.6 | −124.3 | −125.1 | −125.5 | −126.1 | −126.8 | −127.2 | −127.8 |
| D (km) | 23 | 24 | 25 | 26 | 27 | 28 | 29 | 30 |
| Actual received power (dBm) | −128.4 | −129.1 | −130.2 | −130.8 | −131.4 | −131.8 | −132.6 | −133.1 |
| Signal Type | BER Threshold |
|---|---|
| Audio Signals | |
| Image Signals | |
| Video Signals |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, G.; Lu, H.; Zhang, S.; Wu, F.; Qin, Y.; Jiang, B. Construction and Analysis of the EMC Evaluation Model for Vehicular Communication Systems Based on Digital Maps. Remote Sens. 2023, 15, 4872. https://doi.org/10.3390/rs15194872
Zhang G, Lu H, Zhang S, Wu F, Qin Y, Jiang B. Construction and Analysis of the EMC Evaluation Model for Vehicular Communication Systems Based on Digital Maps. Remote Sensing. 2023; 15(19):4872. https://doi.org/10.3390/rs15194872
Chicago/Turabian StyleZhang, Guangshuo, Hongmin Lu, Shiwei Zhang, Fulin Wu, Yangzhen Qin, and Bo Jiang. 2023. "Construction and Analysis of the EMC Evaluation Model for Vehicular Communication Systems Based on Digital Maps" Remote Sensing 15, no. 19: 4872. https://doi.org/10.3390/rs15194872
APA StyleZhang, G., Lu, H., Zhang, S., Wu, F., Qin, Y., & Jiang, B. (2023). Construction and Analysis of the EMC Evaluation Model for Vehicular Communication Systems Based on Digital Maps. Remote Sensing, 15(19), 4872. https://doi.org/10.3390/rs15194872