
Peat Drainage Ditch Mapping from Aerial Imagery Using a Convolutional Neural Network


Abstract
:1. Introduction
2. Materials and Methods
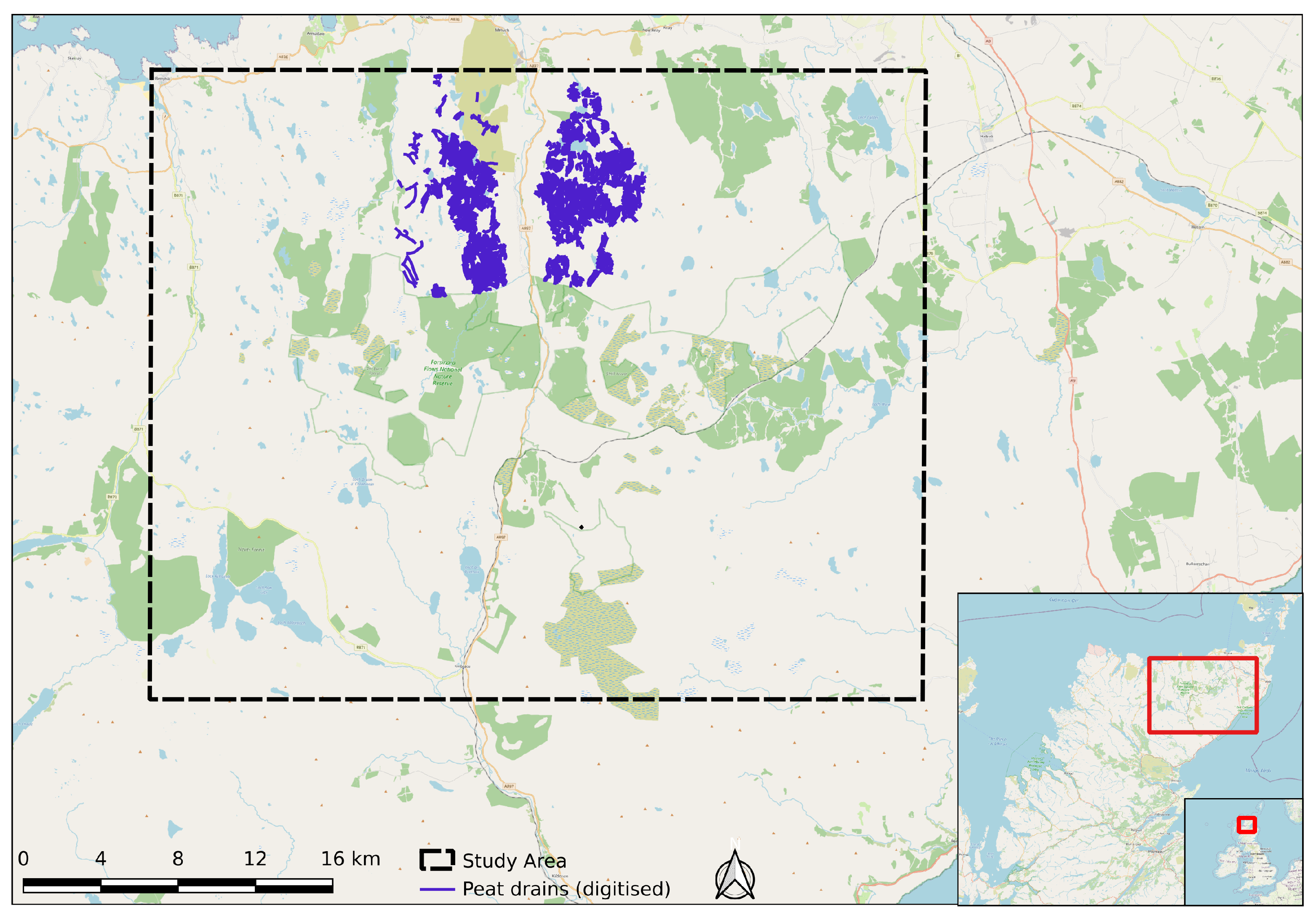
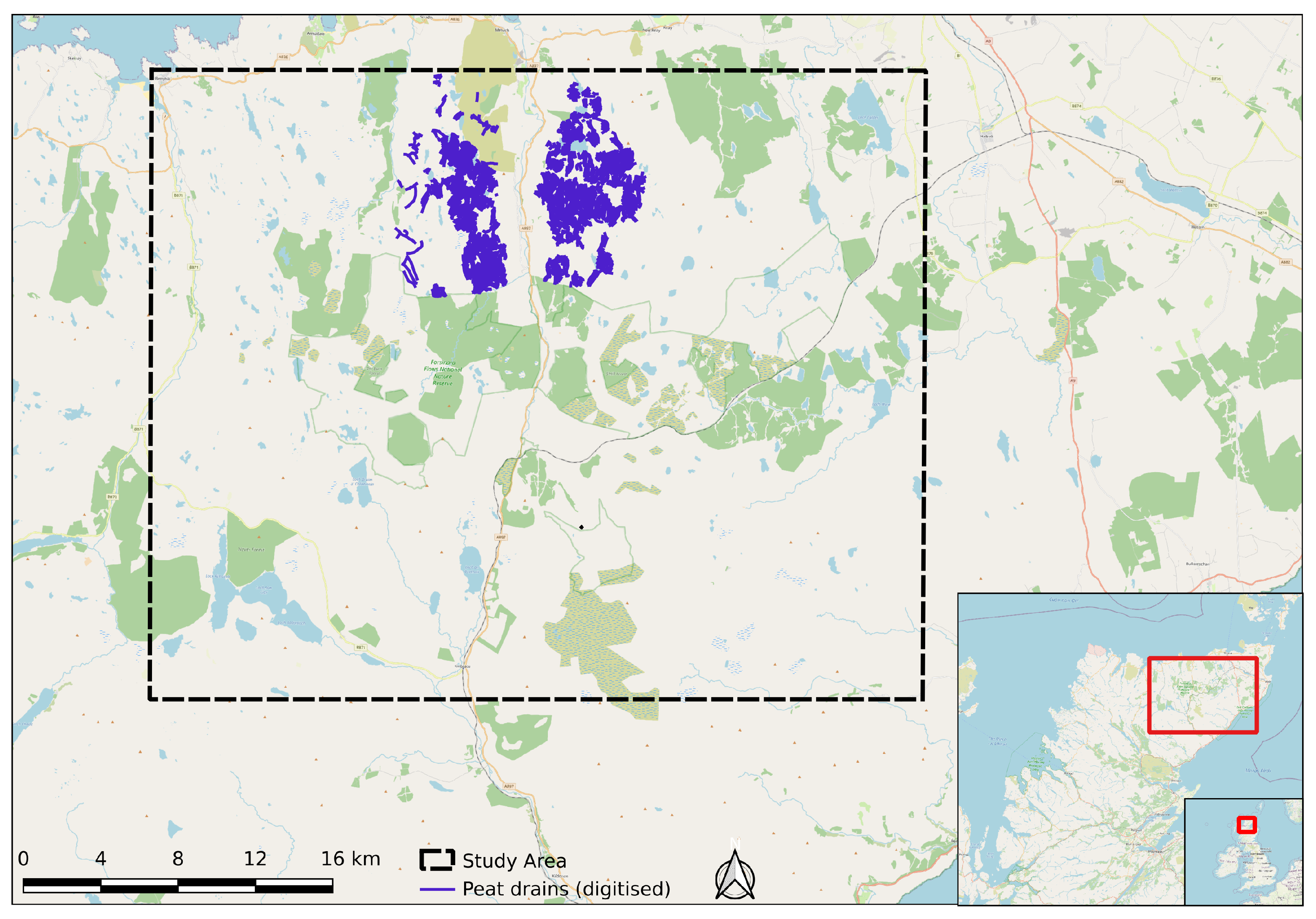
2.1. Study Site
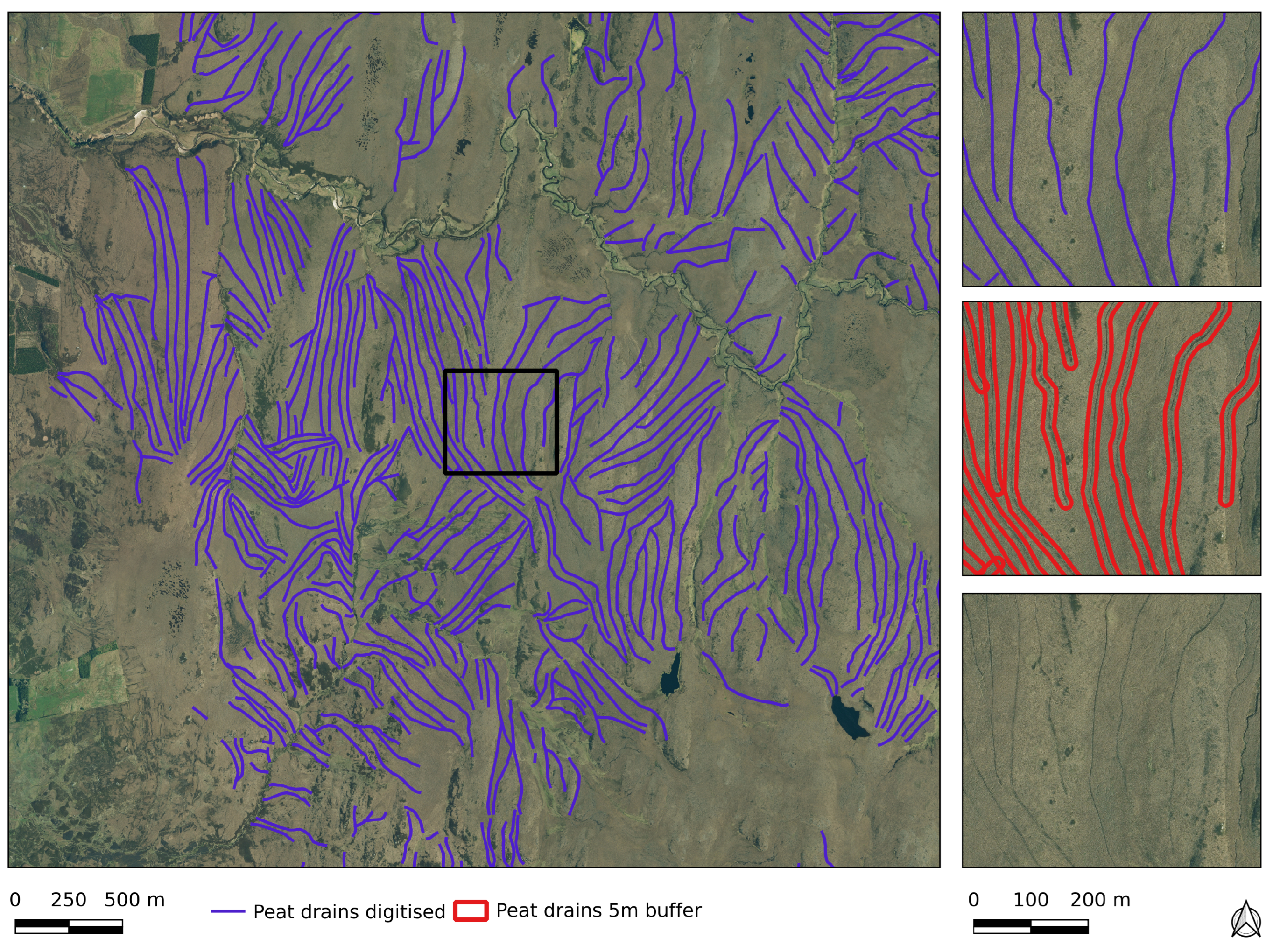
2.2. Aerial Imagery and Field Data
2.3. Image Processing and CNNs
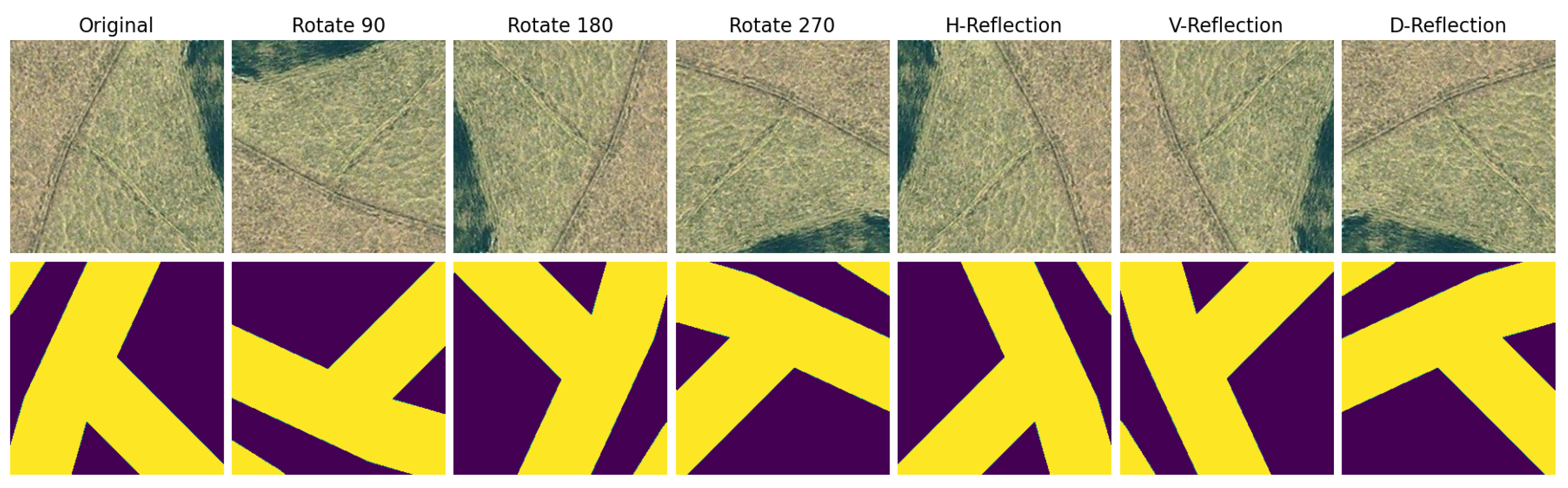
2.3.1. Pre-Processing and Training Augmentations
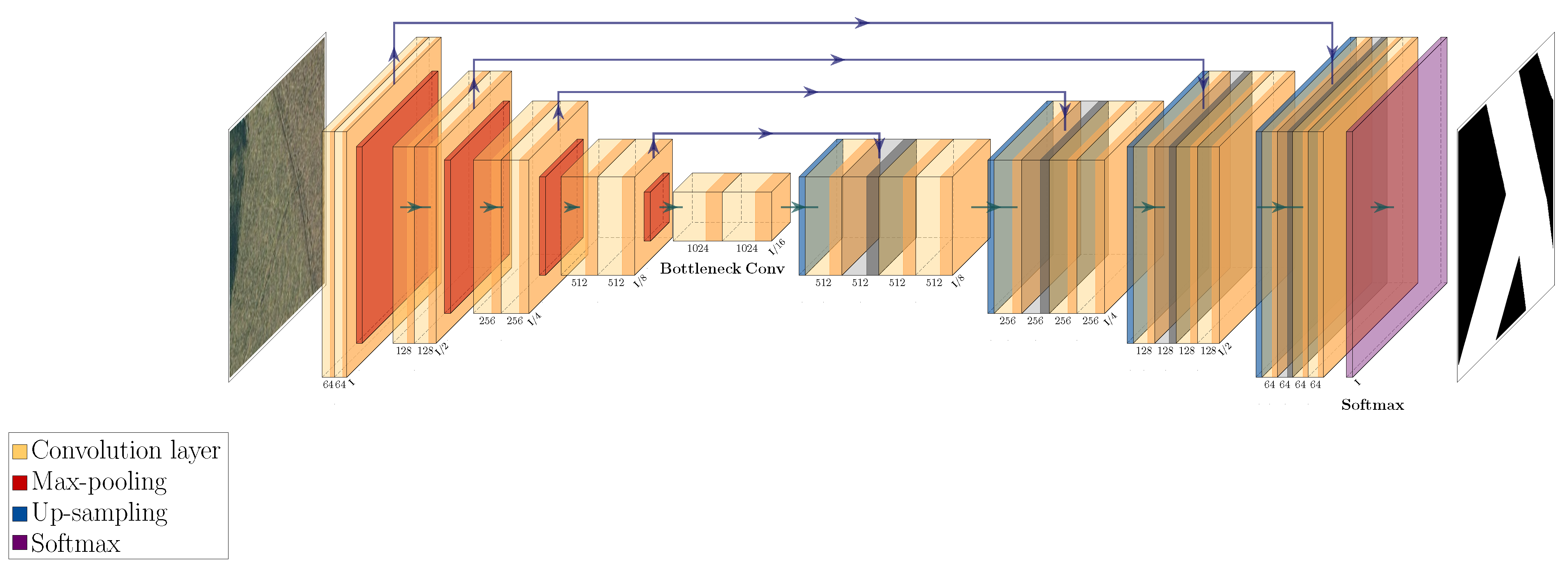
2.3.2. CNN Overview and Model Choice
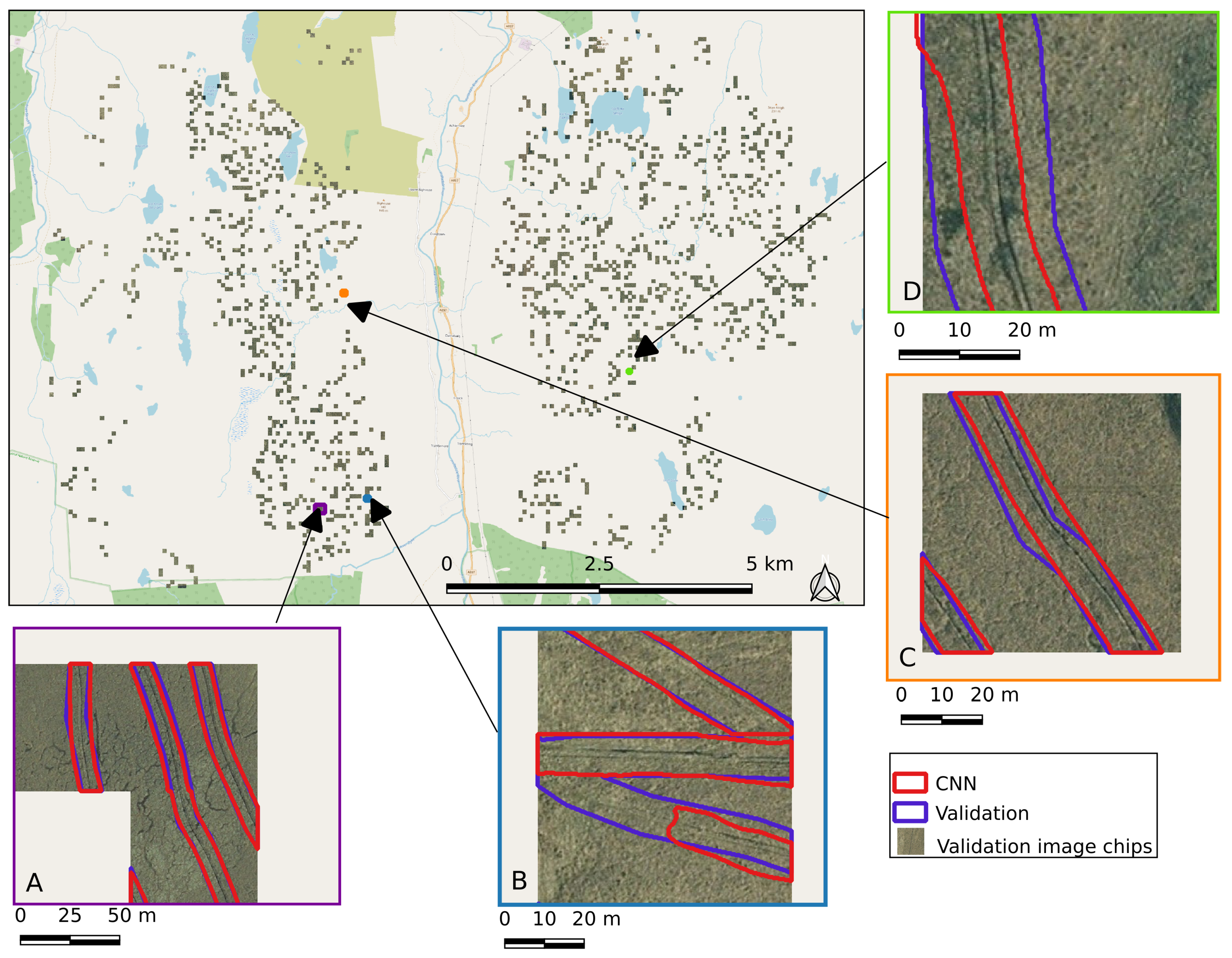
2.3.3. Accuracy Assessment
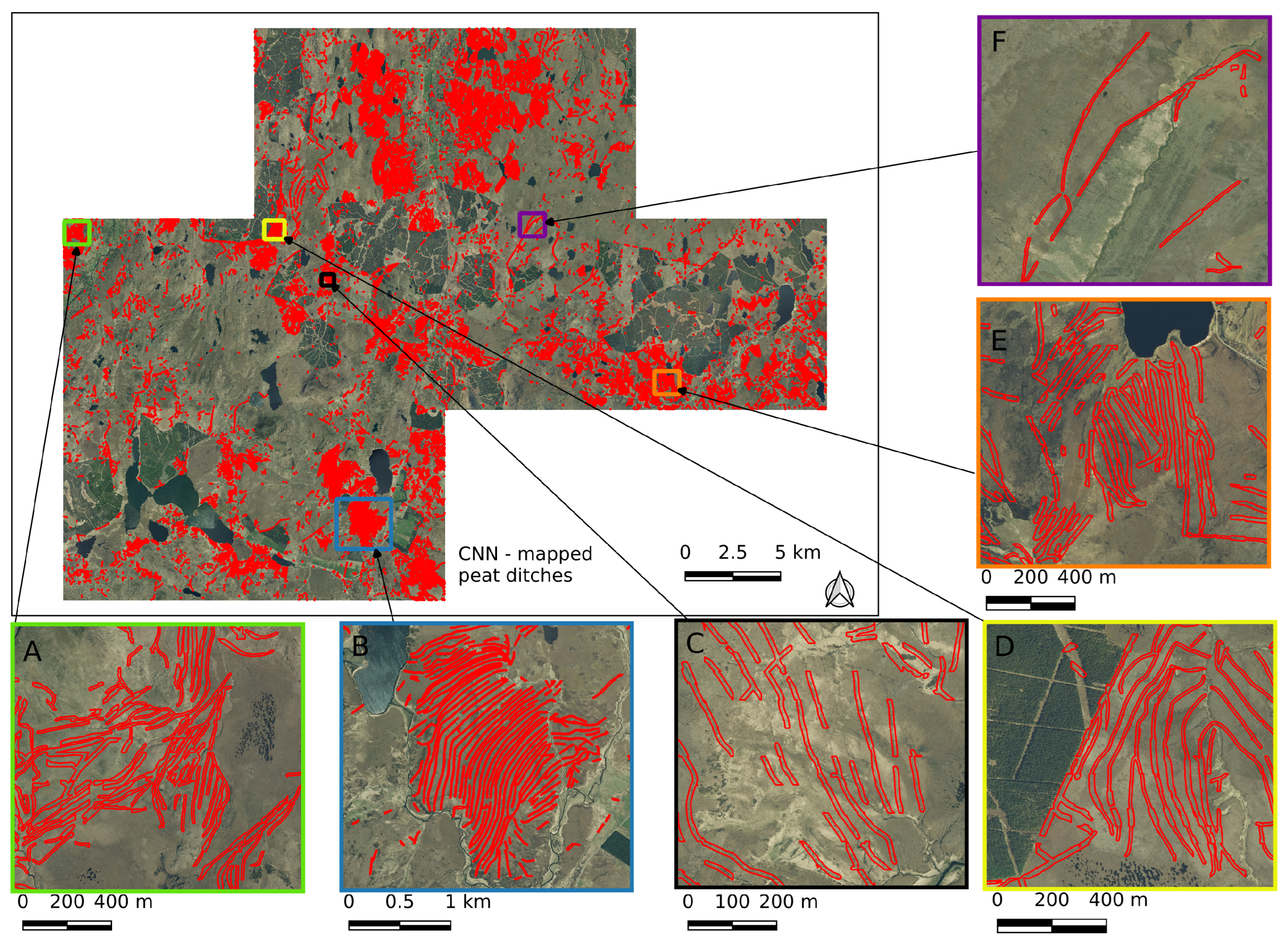
3. Results
Accuracy
4. Discussion
4.1. Reference Data and Classification Accuracy
4.2. Comparison with Other Studies
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| GHG | Greenhouse gas |
| DOC | Dissolved Organic Carbon |
| POC | Particulate Organic Carbon |
| LiDAR | Light Detection and Ranging |
| ML | Machine Learning |
| CNN | Convolutional Neural Net |
References
- Leifeld, J.; Wüst-Galley, C.; Page, S. Intact and managed peatland soils as a source and sink of GHGs from 1850 to 2100. Nat. Clim. Chang. 2019, 9, 945–947. [Google Scholar] [CrossRef]
- Joosten, H.; Sirin, A.; Couwenberg, J.; Laine, J.; Smith, P. The role of peatlands in climate regulation. In Peatland Restoration and Ecosystem Services: Science, Policy and Practice; Bonn, A., Allott, T., Evans, M., Joosten, H., Stoneman, R., Eds.; Ecological Reviews; Cambridge University Press: Cambridge, UK, 2016; pp. 63–76. [Google Scholar] [CrossRef]
- Evans, C.D.; Peacock, M.; Baird, A.J.; Artz, R.R.; Burden, A.; Callaghan, N.; Chapman, P.J.; Cooper, H.M.; Coyle, M.; Craig, E.; et al. Overriding water table control on managed peatland greenhouse gas emissions. Nature 2021, 593, 548–552. [Google Scholar] [CrossRef] [PubMed]
- Sirin, A.; Medvedeva, M.; Korotkov, V.; Itkin, V.; Minayeva, T.; Ilyasov, D.; Suvorov, G.; Joosten, H. Addressing peatland rewetting in Russian federation climate reporting. Land 2021, 10, 1200. [Google Scholar] [CrossRef]
- Bain, C.G.; Bonn, A.; Stoneman, R.; Chapman, S.; Coupar, A.; Evans, M.; Gearey, B.; Howat, M.; Joosten, H.; Keenleyside, C.; et al. IUCN UK Commission of Inquiry on Peatlands; IUCN UK Peatland Programme: Edinburgh, UK, 2011. [Google Scholar]
- Artz, R.; Evans, C.; Crosher, I.; Hancock, M.; Scott-Campbell, M.; Pilkington, M.; Jones, P.; Chandler, D.; McBride, A.S.; Ross, K.F.C.; et al. Commission of Inquiry on Peatlands: The State of UK Peatlands—An Update; Technical Report September; James Hutton Institute: Aberdeen, UK, 2019. [Google Scholar]
- Williamson, J.; Rowe, E.; Reed, D.; Ruffin, L.; Jones, P.; Dolan, R.; Buckingham, H.; Jones, P.; Astbury, S.; Evans, C.D. Historical peat loss explains limited short-term response of drained blanket bogs to rewetting. J. Environ. Manag. 2017, 188, 278–286. [Google Scholar] [CrossRef] [Green Version]
- Parry, L.E.; Holden, J.; Chapman, P.J. Restoration of blanket peatlands. J. Environ. Manag. 2014, 133, 193–205. [Google Scholar] [CrossRef] [Green Version]
- Evans, C.D.; Renou-Wilson, F.; Strack, M. The role of waterborne carbon in the greenhouse gas balance of drained and re-wetted peatlands. Aquat. Sci. 2016, 78, 573–590. [Google Scholar] [CrossRef] [Green Version]
- Evans, C.; Artz, R.; Moxley, J.; Smyth, M.A.; Taylor, E.; Archer, N.; Burden, A.; Williamson, J.; Donnelly, D.; Thomson, A.; et al. Implementation of an Emissions Inventory for UK Peatlands; Technical Report 1; UK Centre for Ecology and Hydrology: Lancaster, UK, 2017. [Google Scholar]
- UK Centre for Ecology and Hydrology; Element Energy. Greenhouse Gas Removal Methods and Their Potential UK Deployment; Technical Report October; UK Centre for Ecology and Hydrology Element Energy: Lancaster, UK, 2021. [Google Scholar]
- Carless, D.; Luscombe, D.J.; Gatis, N.; Anderson, K.; Brazier, R.E. Mapping landscape-scale peatland degradation using airborne lidar and multispectral data. Landsc. Ecol. 2019, 34, 1329–1345. [Google Scholar] [CrossRef] [Green Version]
- Bryn, A.; Dramstad, W.; Fjellstad, W. Mapping and density analyses of drainage ditches in Iceland. In Proceedings of the Mapping and Monitoring of Nordic Vegetation and landscapes, Hverageroi, Iceland, 16–18 September 2009; Norsk Institutt for Skog og Landskap: Steinkjer, Norway, 2010; pp. 43–45. [Google Scholar]
- Cazorzi, F.; Fontana, G.D.; Luca, A.D.; Sofia, G.; Tarolli, P. Drainage network detection and assessment of network storage capacity in agrarian landscape. Hydrol. Process. 2013, 27, 541–553. [Google Scholar] [CrossRef]
- Bailly, J.S.; Lagacherie, P.; Millier, C.; Puech, C.; Kosuth, P. Agrarian landscapes linear features detection from LiDAR: Application to artificial drainage networks. Int. J. Remote Sens. 2008, 29, 3489–3508. [Google Scholar] [CrossRef]
- Connolly, J.; Holden, N.M. Detecting peatland drains with Object Based Image Analysis and Geoeye-1 imagery. Carbon Balance Manag. 2017, 12, 7. [Google Scholar] [CrossRef] [Green Version]
- Rapinel, S.; Hubert-Moy, L.; Clément, B.; Nabucet, J.; Cudennec, C. Ditch network extraction and hydrogeomorphological characterization using LiDAR-derived DTM in wetlands. Hydrol. Res. 2015, 46, 276–290. [Google Scholar] [CrossRef]
- Roelens, J.; Höfle, B.; Dondeyne, S.; Van Orshoven, J.; Diels, J. Drainage ditch extraction from airborne LiDAR point clouds. ISPRS J. Photogramm. Remote Sens. 2018, 146, 409–420. [Google Scholar] [CrossRef]
- Artz, R.R.E.; Donaldson-Selby, G.; Poggio, L.; Donnelly, D.; Aitkenhead, M. Comparison of Remote Sensing Approaches for Detection of Peatland Drainage in Scotland; Technical Report; The James Hutton Institute: Aberdeen, UK, 2017. [Google Scholar]
- Waldner, F.; Diakogiannis, F.I. Deep learning on edge: Extracting field boundaries from satellite images with a convolutional neural network. Remote Sens. Environ. 2020, 245, 111741. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the 18th International Conference on Medical Image Computing and Computer-Assisted Intervention, Munich, Germany, 5–9 October 2015; pp. 234–241. [Google Scholar] [CrossRef] [Green Version]
- Falk, T.; Mai, D.; Bensch, R.; Çiçek, Ö.; Abdulkadir, A.; Marrakchi, Y.; Böhm, A.; Deubner, J.; Jäckel, Z.; Seiwald, K.; et al. U-Net: Deep learning for cell counting, detection, and morphometry. Nat. Methods 2019, 16, 67–70. [Google Scholar] [CrossRef] [PubMed]
- Kattenborn, T.; Eichel, J.; Fassnacht, F.E. Convolutional Neural Networks enable efficient, accurate and fine-grained segmentation of plant species and communities from high-resolution UAV imagery. Sci. Rep. 2019, 9, 17656. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.C.; Papandreou, G.; Kokkinos, I.; Murphy, K.; Yuille, A.L. DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution, and Fully Connected CRFs. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 834–848. [Google Scholar] [CrossRef] [Green Version]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. In Proceedings of the Advances in Neural Information Processing Systems, Lake Tahoe, NV, USA, 3–6 December 2012; Pereira, F., Burges, C.J.C., Bottou, L., Weinberger, K.Q., Eds.; Curran Associates, Inc.: Red Hook, NY, USA, 2012; Volume 25. [Google Scholar]
- He, K.; Gkioxari, G.; Dollar, P.; Girshick, R. Mask R-CNN. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar] [CrossRef]
- Zhang, C.; Atkinson, P.M.; George, C.; Wen, Z.; Diazgranados, M.; Gerard, F. Identifying and mapping individual plants in a highly diverse high-elevation ecosystem using UAV imagery and deep learning. ISPRS J. Photogramm. Remote Sens. 2020, 169, 280–291. [Google Scholar] [CrossRef]
- Lindsay, R.; Charman, D.J.; Everingham, F.; Reilly, R.M.O.; Palmer, M.A.; Rowell, T.A.; Stroud, D.A.; Ratcliffe, D.A.; Oswald, P.H.; O’Reilly, R.M.; et al. The Flow Country—The peatlands of Caithness and Sutherland; Technical Report; Joint Nature Conservation Committee: Peterborough, UK, 1988. [Google Scholar]
- Alshammari, L.; Large, D.J.; Boyd, D.S.; Sowter, A.; Anderson, R.; Andersen, R.; Marsh, S. Long-term peatland condition assessment via surface motion monitoring using the ISBAS DInSAR technique over the Flow Country, Scotland. Remote Sens. 2018, 10, 1103. [Google Scholar] [CrossRef] [Green Version]
- Robb, C. Geospatial-Learn; Zenodo: Geneve, Switzerland, 2017. [Google Scholar] [CrossRef]
- Virtanen, P.; Gommers, R.; Oliphant, T.E.; Haberland, M.; Reddy, T.; Cournapeau, D.; Burovski, E.; Peterson, P.; Weckesser, W.; Bright, J.; et al. SciPy 1.0: Fundamental Algorithms for Scientific Computing in Python. Nat. Methods 2020, 17, 261–272. [Google Scholar] [CrossRef] [Green Version]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Louppe, G.; Prettenhofer, P.; Weiss, R.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2012, 12, 2825–2830. [Google Scholar] [CrossRef]
- GDAL OGR Contributors. {GDAL/OGR} Geospatial Data Abstraction Software Library; Open Source Geospatial Foundation: Beaverton, OR, USA, 2020. [Google Scholar]
- Paszke, A.; Gross, S.; Massa, F.; Lerer, A.; Bradbury, J.; Chanan, G.; Killeen, T.; Lin, Z.; Gimelshein, N.; Antiga, L.; et al. PyTorch: An Imperative Style, High-Performance Deep Learning Library. In Advances in Neural Information Processing Systems 32; Wallach, H., Larochelle, H., Beygelzimer, A., d’Alché-Buc, F., Fox, E., Garnett, R., Eds.; Curran Associates, Inc.: Red Hook, NY, USA, 2019; pp. 8024–8035. [Google Scholar]
- Buslaev, A.; Parinov, A.; Khvedchenya, E.; Iglovikov, V.I.; Kalinin, A.A. Albumentations: Fast and flexible image augmentations. Information 2020, 11, 125. [Google Scholar] [CrossRef] [Green Version]
- Maggiori, E.; Tarabalka, Y.; Charpiat, G.; Alliez, P. Can Semantic Labeling Methods Generalize to Any City? The Inria Aerial Image Labeling Benchmark. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017. [Google Scholar]
- Wijedasa, L.S.; Sloan, S.; Page, S.E.; Clements, G.R.; Lupascu, M.; Evans, T.A. Carbon emissions from South-East Asian peatlands will increase despite emission-reduction schemes. Glob. Chang. Biol. 2018, 24, 4598–4613. [Google Scholar] [CrossRef] [PubMed]
- Smith, P.; Clark, H.; Dong, H.; Elsiddig, E.A.; Haberl, H.; Harper, R.; House, J.; Jafari, M.; Masera, O.; Mbow, C.; et al. Agriculture, Forestry and Other Land Use (AFOLU). In Mitigation of Climate Change. Contribution of Working Group III to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change; Edenhofer, O., Pichs-Madruga, R., Sokona, Y., Farahani, E., Kadner, S., Seyboth, K., Adler, A., Baum, I., Brunner, S., Eickemeier, P., et al., Eds.; Cambridge University Press: Cambridge, UK, 2014; pp. 811–922. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stage | Precision | Recall | F |
|---|---|---|---|
| Validation | 0.87 | 0.73 | 0.79 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Robb, C.; Pickard, A.; Williamson, J.L.; Fitch, A.; Evans, C. Peat Drainage Ditch Mapping from Aerial Imagery Using a Convolutional Neural Network. Remote Sens. 2023, 15, 499. https://doi.org/10.3390/rs15020499
Robb C, Pickard A, Williamson JL, Fitch A, Evans C. Peat Drainage Ditch Mapping from Aerial Imagery Using a Convolutional Neural Network. Remote Sensing. 2023; 15(2):499. https://doi.org/10.3390/rs15020499
Chicago/Turabian StyleRobb, Ciaran, Amy Pickard, Jennifer L. Williamson, Alice Fitch, and Chris Evans. 2023. "Peat Drainage Ditch Mapping from Aerial Imagery Using a Convolutional Neural Network" Remote Sensing 15, no. 2: 499. https://doi.org/10.3390/rs15020499
APA StyleRobb, C., Pickard, A., Williamson, J. L., Fitch, A., & Evans, C. (2023). Peat Drainage Ditch Mapping from Aerial Imagery Using a Convolutional Neural Network. Remote Sensing, 15(2), 499. https://doi.org/10.3390/rs15020499