
Improved Medium Baseline RTK Positioning Performance Based on BDS/Galileo/GPS Triple-Frequency-Only Observations

Abstract
:
1. Introduction
2. Medium Baseline RTK Algorithm
2.1. Double-Difference Triple-Frequency Measurement Model
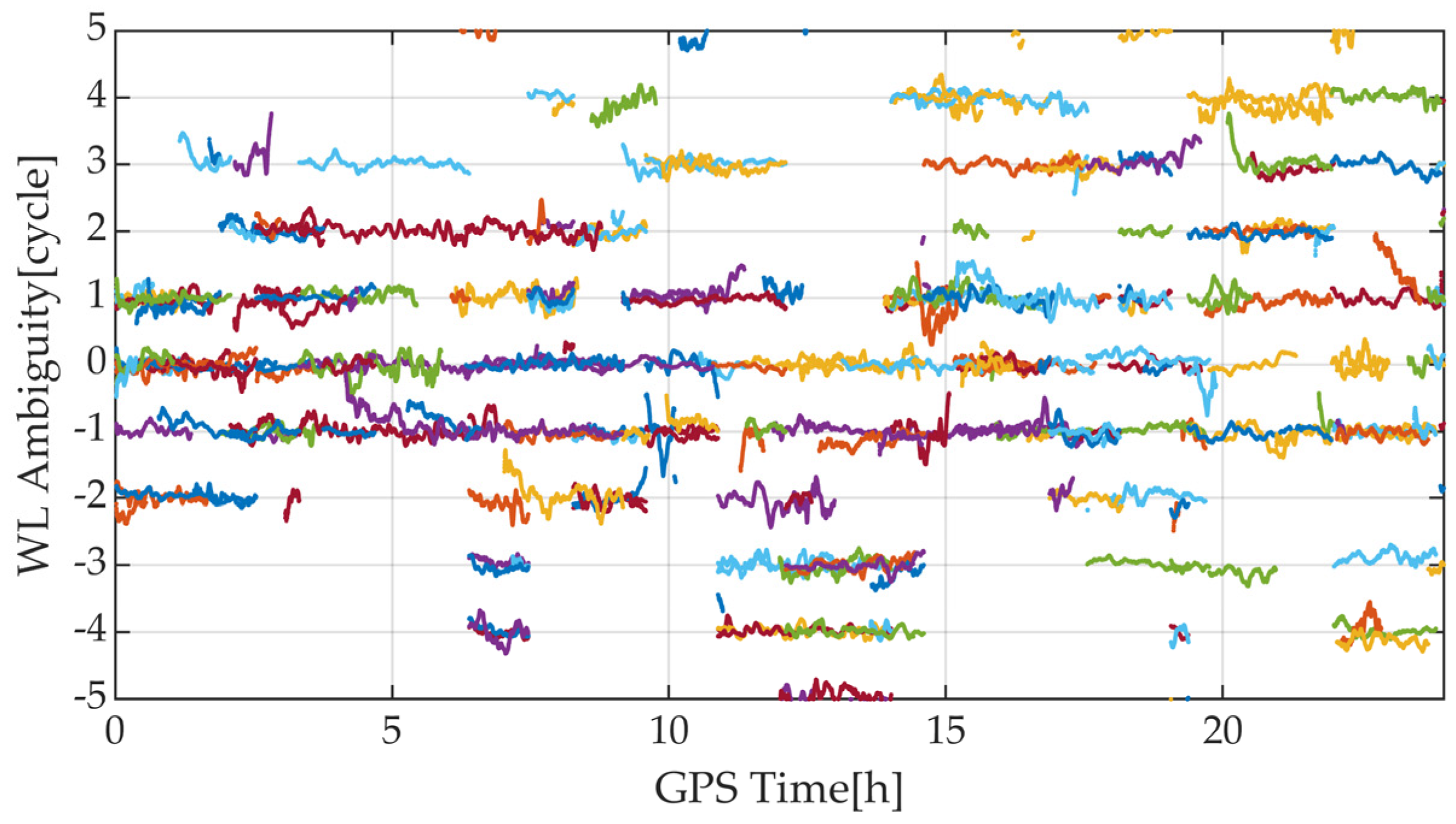
2.2. Triple-Frequency Ambiguity Resolution
2.3. Determination Process Noise of DD Ionospheric and Tropospheric Delay
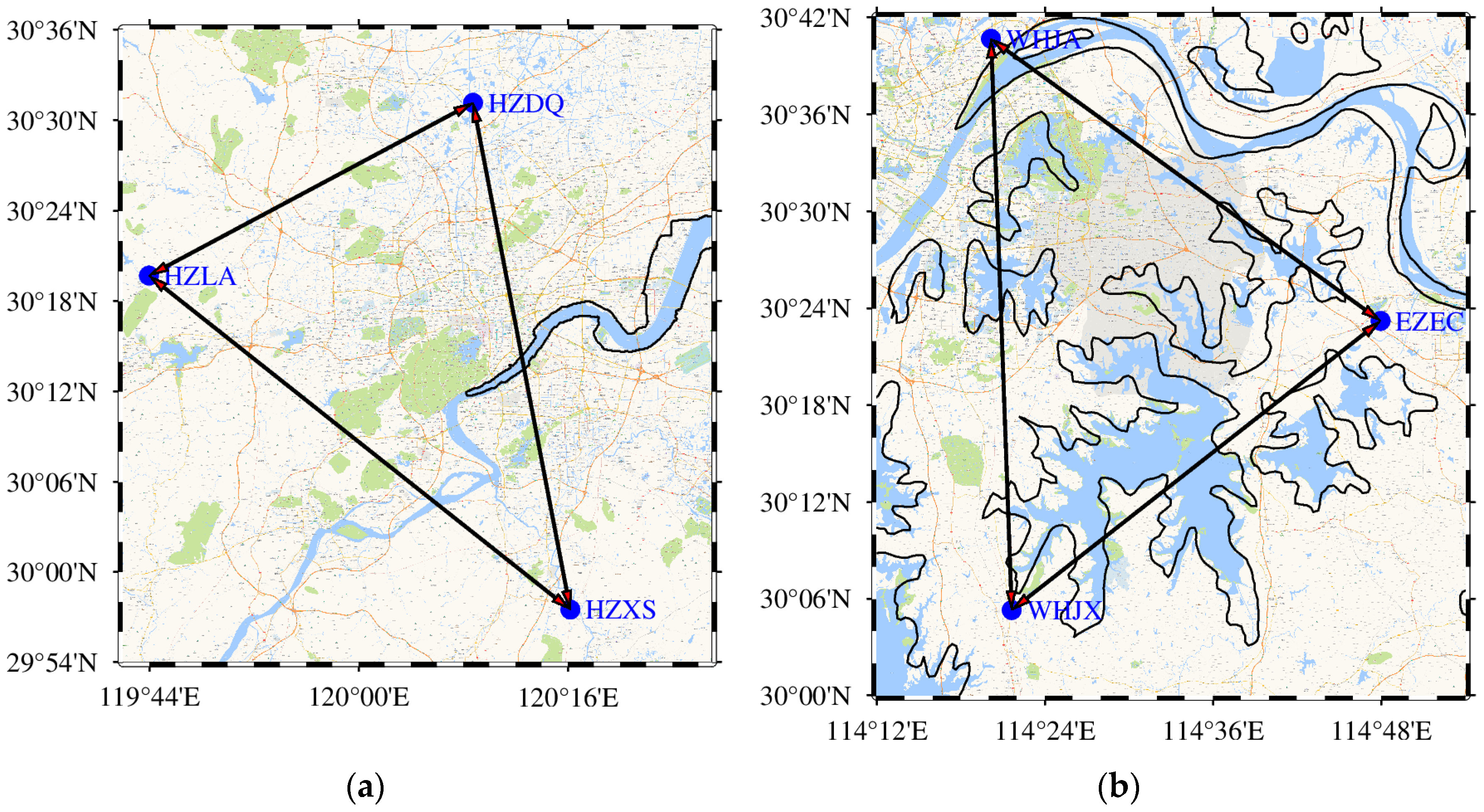
3. Datasets and Processing Strategies
4. DD Troposphere Delay and Ionosphere Delay Analysis
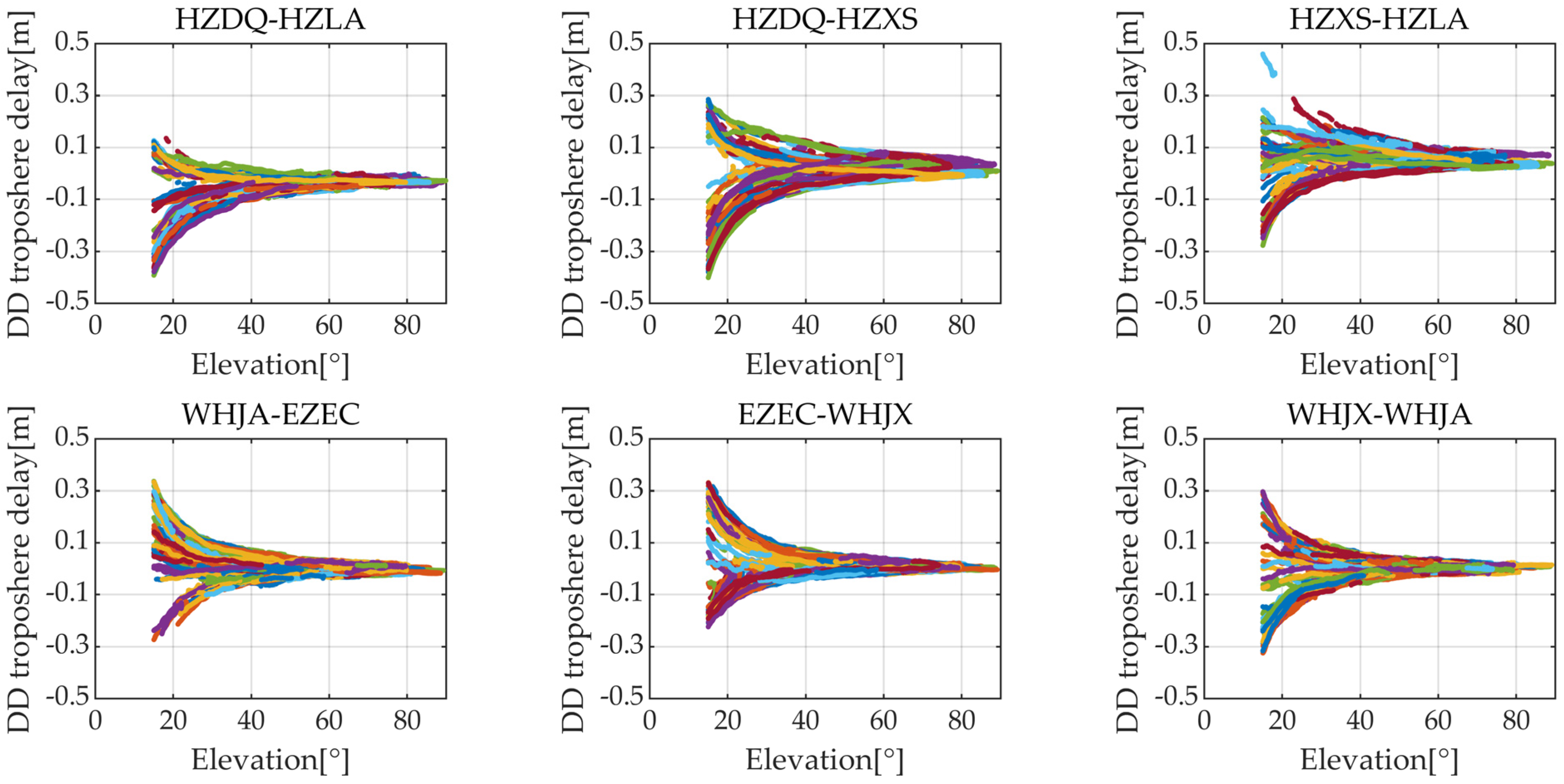
4.1. DD Troposhere Delay
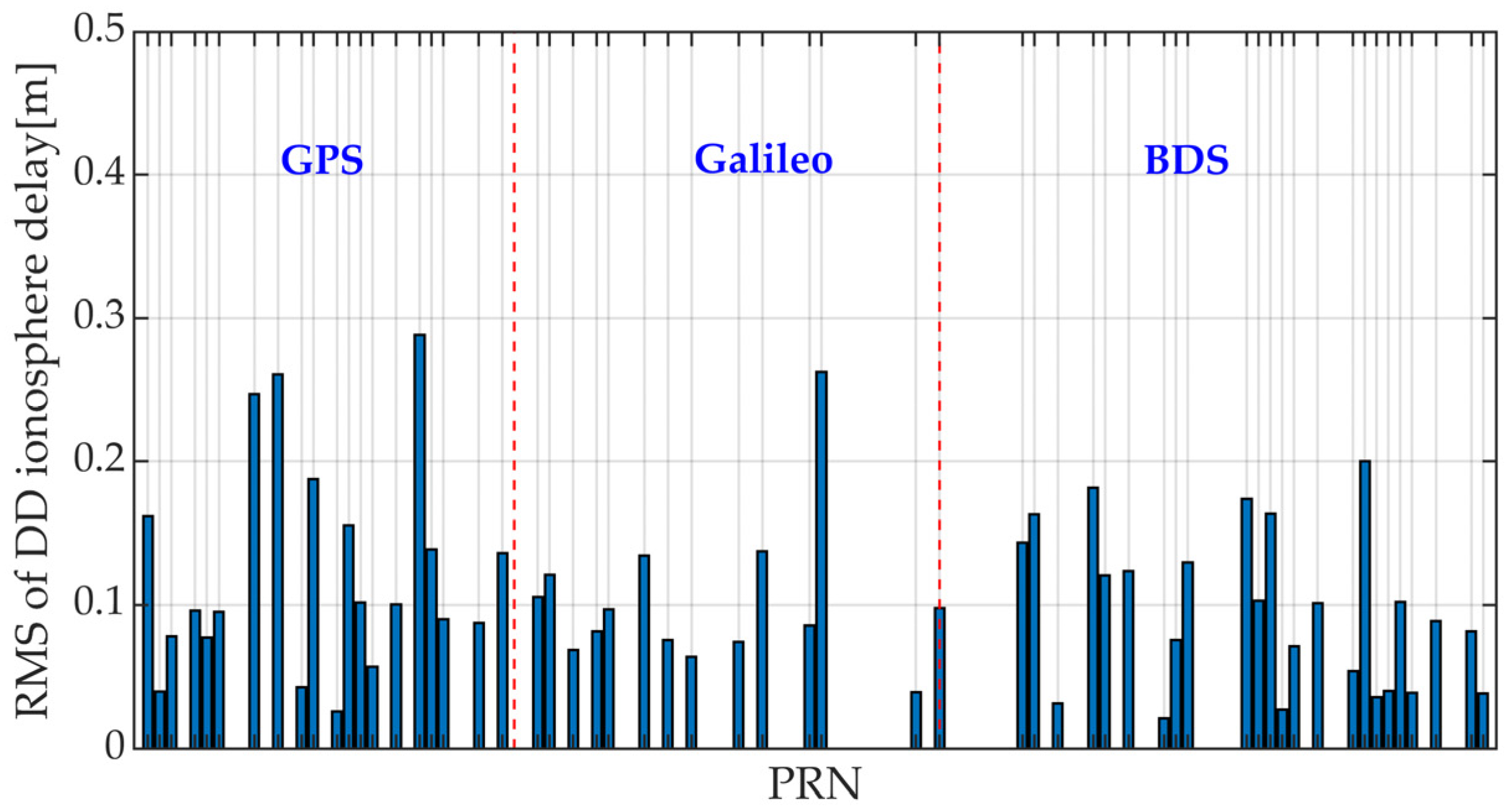
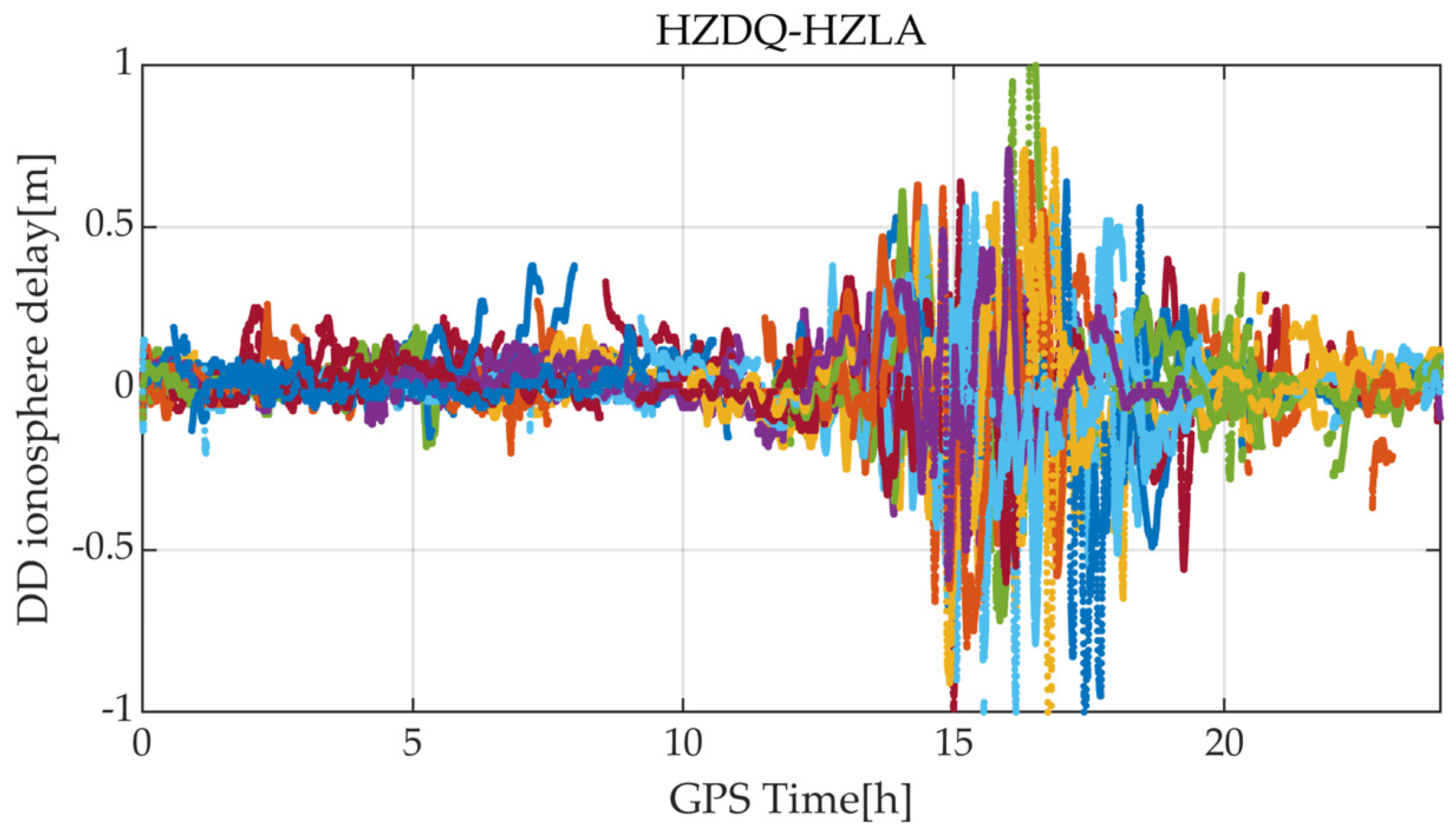
4.2. DD Ionosphere Delay
5. Triple-Frequency Medium RTK Performance Analysis
5.1. Satellite Number and PDOP
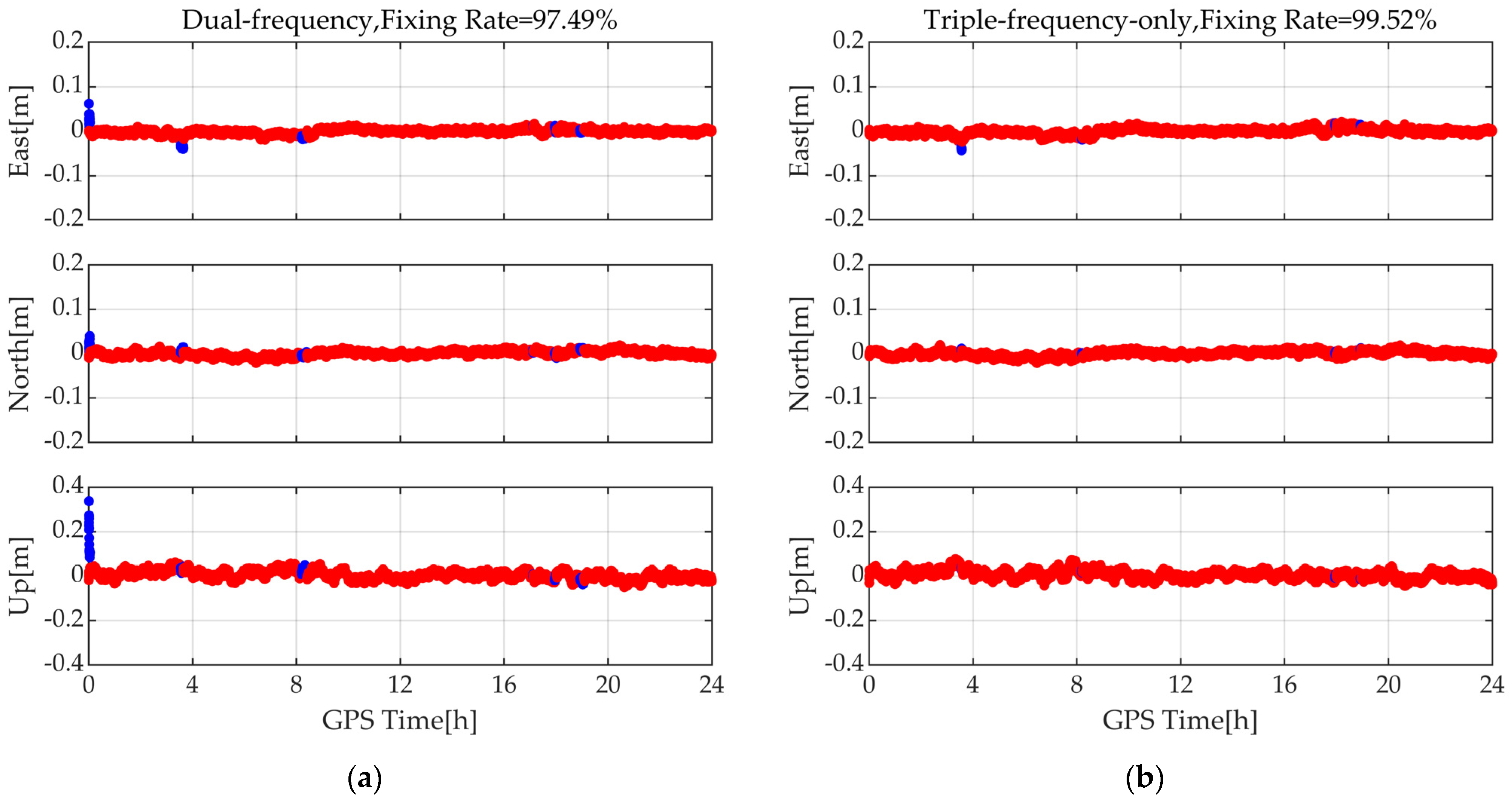
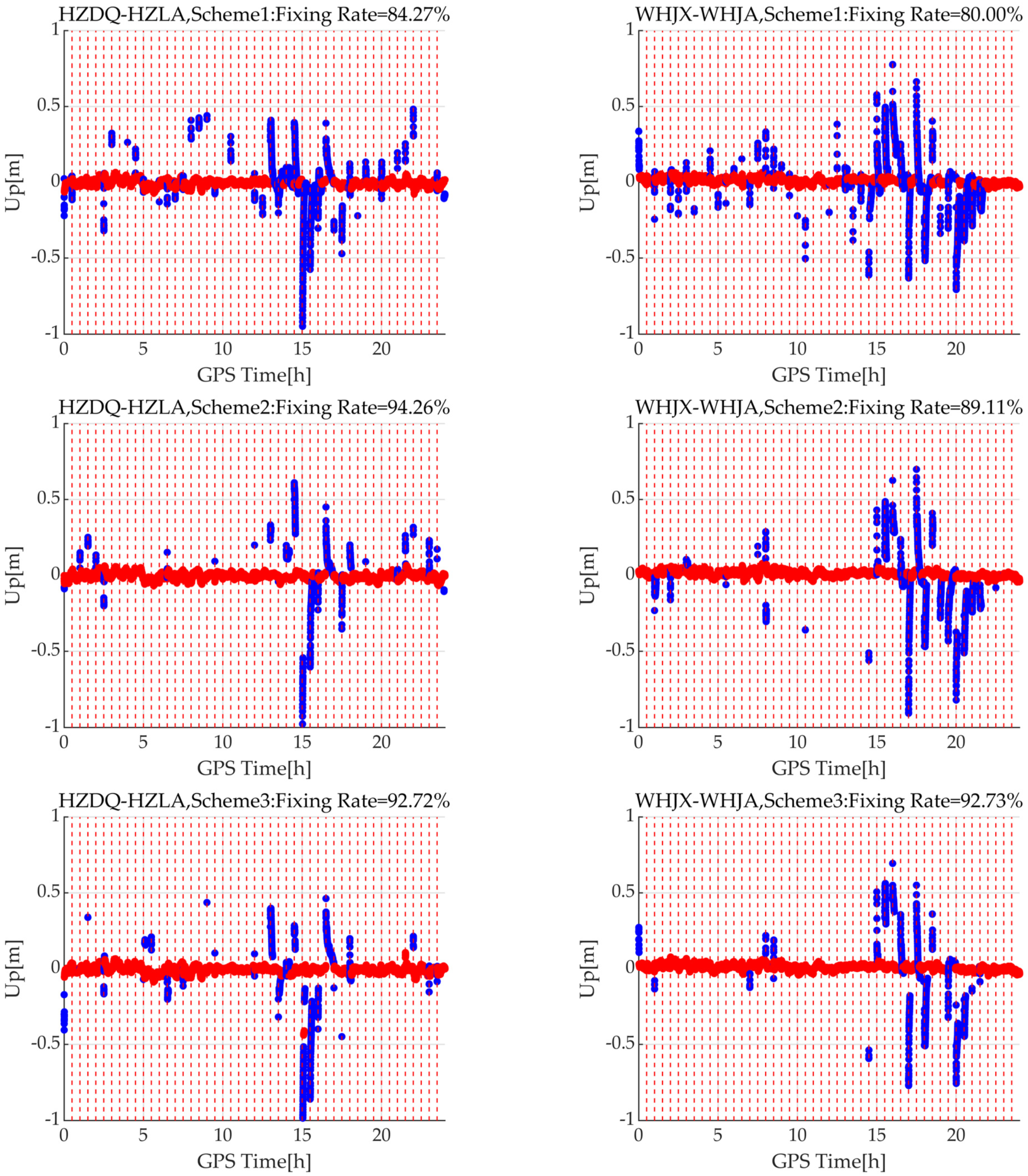
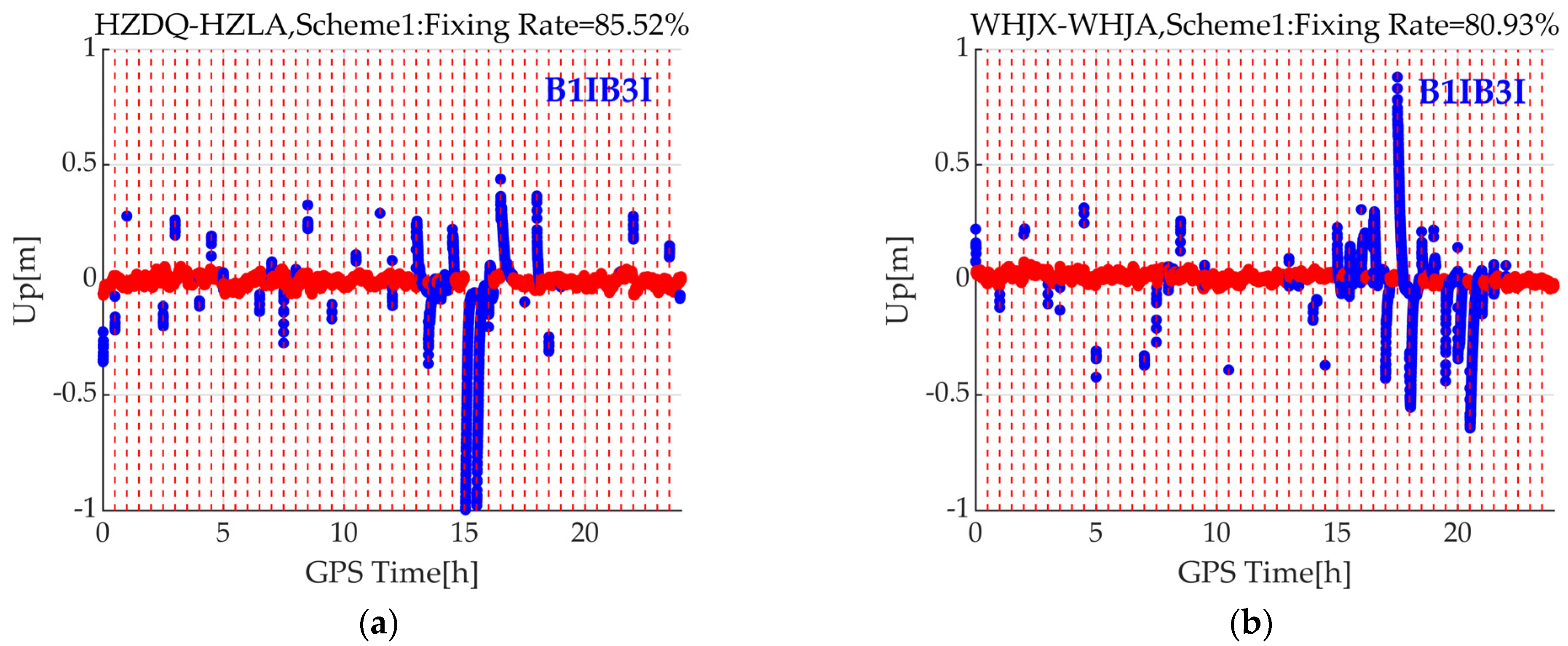
5.2. Positioning Accuracy and Fixing Rate
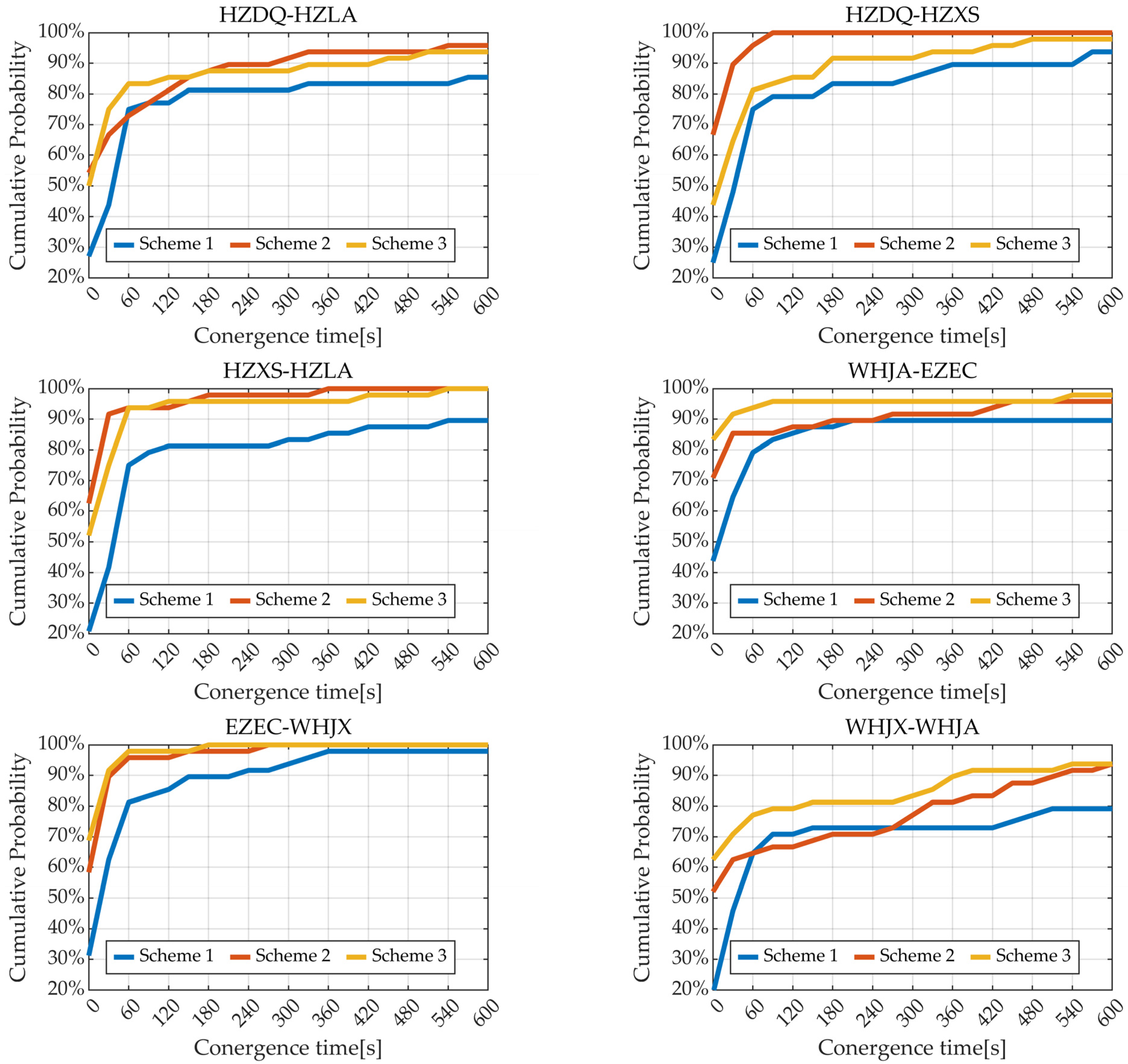
5.3. Convergence Performance
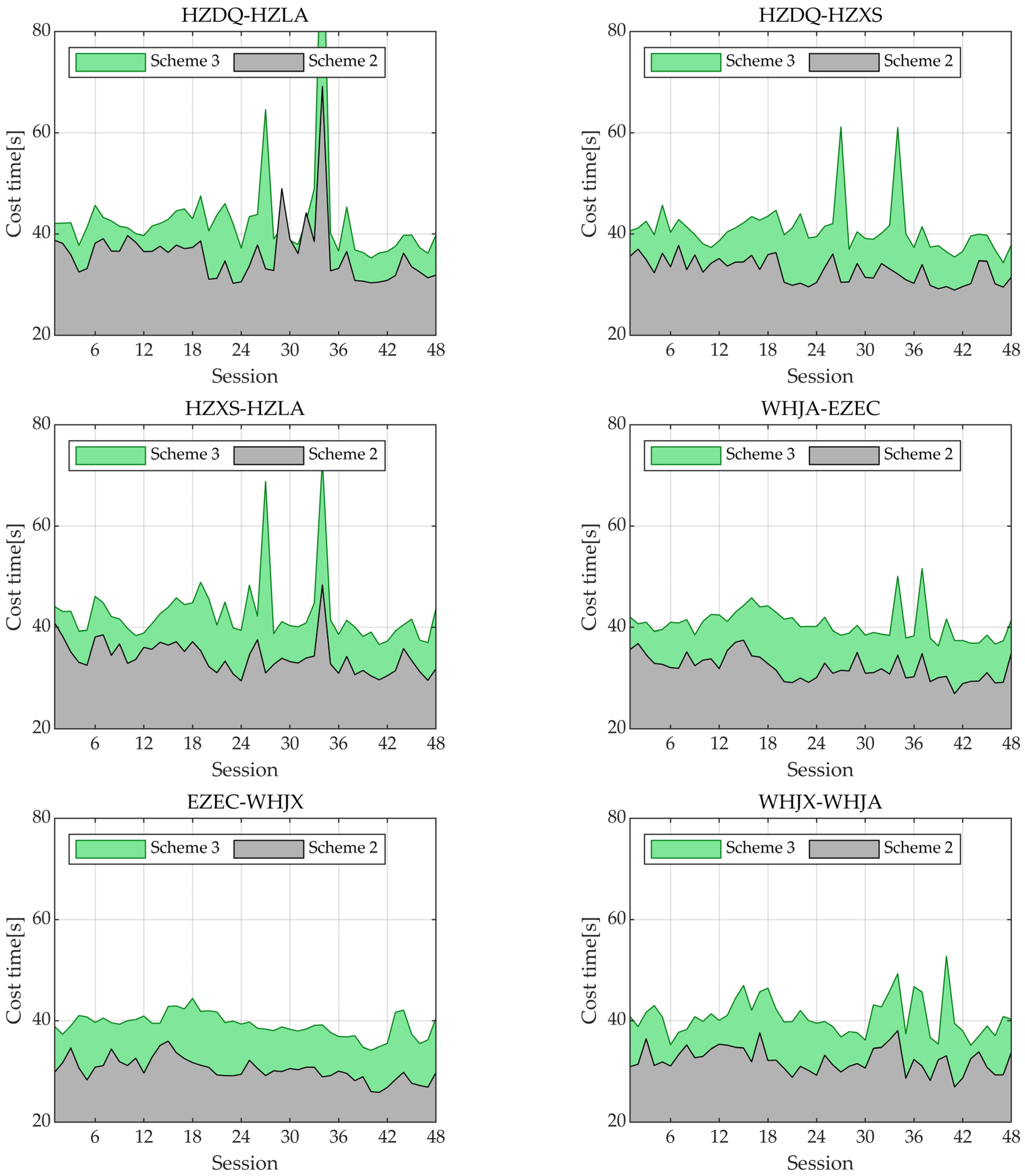
5.4. Computation Cost Time
6. Discussion
7. Conclusions
- For medium baselines of 45–66 km at latitude 30°, the RMSE of DD slant troposphere delay is about 6.2 cm, and the RMSE of DD slant ionosphere delay is about 10.7 cm. They can be neglected for geometry-based WL ambiguity resolution, but cannot be neglected when fixing the raw ambiguity;
- In the Yangtze River Delta region of China, when performing BDS/Galileo/GPS triple-system positioning, 90% of the time includes more than 10 available satellites with 3 frequencies (BDS B1I/B2a/B3I, GPS L1/L2/L5, Galileo E1/E5a/E5b). The average PDOP value of triple-frequency-only case during the entire time period is less than 2.0, indicating a good geometric configuration;
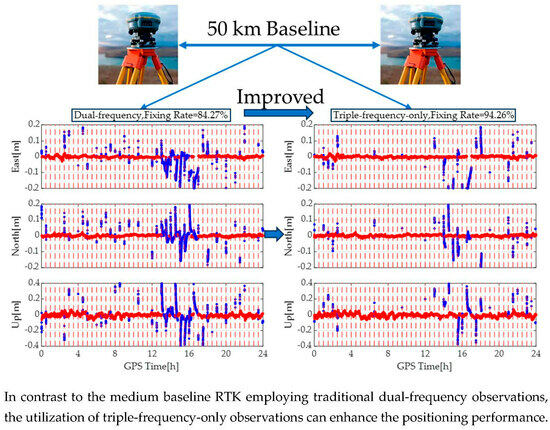
- Compared to dual-frequency RTK, the improvement in accuracy after convergence is not obvious for triple-frequency RTK, but the convergence speed is improved. Furthermore, compared to dual-frequency RTK, the probability of completing convergence within 180s is increased by about 8.0% for triple-frequency-only RTK;
- Compared to the scheme of using both dual-frequency and triple-frequency data simultaneously, the computation cost time of the scheme using triple-frequency-only data is reduced by 8.26 s, improving by approximately 20%.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ai, Q.; Liu, T.; Zhang, B.; Zha, J.; Yuan, Y. Simultaneous estimation of inter-frequency clock biases and clock offsets with triple-frequency GPS data: Undifferenced and uncombined methodology and impact analysis. GPS Solut. 2023, 27, 145. [Google Scholar] [CrossRef]
- Li, X.; Li, X.; Jiang, Z.; Xia, C.; Shen, Z.; Wu, J. A unified model of GNSS phase/code bias calibration for PPP ambiguity resolution with GPS, BDS, Galileo and GLONASS multi-frequency observations. GPS Solut. 2022, 26, 84. [Google Scholar] [CrossRef]
- Psychas, D.; Verhagen, S.; Teunissen, P.J.G. Precision analysis of partial ambiguity resolution-enabled PPP using multi-GNSS and multi-frequency signals. Adv. Space Res. 2020, 66, 2075–2093. [Google Scholar] [CrossRef]
- Odolinski, R.; Teunissen, P.J.G.; Zhang, B. Multi-GNSS processing, positioning and applications PREFACE. J. Spat. Sci. 2020, 65, 3–5. [Google Scholar] [CrossRef]
- Quan, Y.; Lau, L.; Roberts, G.W.; Meng, X. Measurement Signal Quality Assessment on All Available and New Signals of Multi-GNSS (GPS, GLONASS, Galileo, BDS, and QZSS) with Real Data. J. Navig. 2016, 69, 313–334. [Google Scholar] [CrossRef]
- Xie, X.; Fang, R.; Geng, T.; Wang, G.; Zhao, Q.; Liu, J. Characterization of GNSS Signals Tracked by the iGMAS Network Considering Recent BDS-3 Satellites. Remote Sens. 2018, 10, 1736. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhu, Y.; Chen, Z. An In-Depth Assessment of the New BDS-3 B1C and B2a Signals. Remote Sens. 2021, 13, 788. [Google Scholar] [CrossRef]
- Yuan, Y.; Mi, X.; Zhang, B. Initial assessment of single- and dual-frequency BDS-3 RTK positioning. Satell. Navig. 2020, 1, 31. [Google Scholar] [CrossRef]
- Deng, C.; Tang, W.; Liu, J.; Shi, C. Reliable single-epoch ambiguity resolution for short baselines using combined GPS/BeiDou system. GPS Solut. 2014, 18, 375–386. [Google Scholar] [CrossRef]
- Odijk, D.; Teunissen, P.J.G.; Huisman, L. First results of mixed GPS plus GIOVE single-frequency RTK in Australia. J. Spat. Sci. 2012, 57, 3–18. [Google Scholar] [CrossRef]
- Odolinski, R.; Teunissen, P.J.G.; Odijk, D. Combined BDS, Galileo, QZSS and GPS single-frequency RTK. GPS Solut. 2015, 19, 151–163. [Google Scholar] [CrossRef]
- Brack, A. Reliable GPS + BDS RTK positioning with partial ambiguity resolution. GPS Solut. 2017, 21, 1093. [Google Scholar] [CrossRef]
- Wu, M.; Liu, W.; Wu, R.; Zhang, X. Tightly combined GPS/Galileo RTK for short and long baselines: Model and performance analysis. Adv. Space Res. 2019, 63, 2003–2020. [Google Scholar] [CrossRef]
- Feng, Y. GNSS three carrier ambiguity resolution using ionosphere-reduced virtual signals. J. Geodesy 2008, 82, 847–862. [Google Scholar] [CrossRef]
- Li, B.; Shen, Y.; Feng, Y.; Gao, W.; Yang, L. GNSS ambiguity resolution with controllable failure rate for long baseline network RTK. J. Geodesy 2014, 88, 99–112. [Google Scholar] [CrossRef]
- Gao, W.; Gao, C.; Pan, S.; Wang, D.; Deng, J. Improving Ambiguity Resolution for Medium Baselines Using Combined GPS and BDS Dual/Triple-Frequency Observations. Sensors 2015, 15, 27525–27542. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Kubo, N.; Chen, J.; Chu, F.-Y.; Wang, H.; Wang, J. Contribution of QZSS with four satellites to multi-GNSS long baseline RTK. J. Spat. Sci. 2020, 65, 41–60. [Google Scholar] [CrossRef]
- Teunissen, P.J.G.; Montenbruck, O. Springer Handbook of Global Navigation Satellite Systems—Signals and Modulation; Springer Nature: Berlin, Germany, 2017; pp. 605–635. [Google Scholar]
- Yin, X.; Chai, H.; Xu, W.; Zhao, L.; Zhu, H. Realization and Evaluation of Real-Time Uncombined GPS/Galileo/BDS PPP-RTK in the Offshore Area of China’s Bohai Sea. Mar. Geod. 2022, 45, 577–594. [Google Scholar] [CrossRef]
- Yin, X.; Chai, H.; El-Mowafy, A.; Zhang, Y.; Zhang, Y.; Du, Z. Modeling and assessment of atmospheric delay for GPS/Galileo/BDS PPP-RTK in regional-scale. Measurement 2022, 194, 111043. [Google Scholar] [CrossRef]
- Teunissen, P.J.G.; De Jonge, P.J.; Tiberius, C.C.J.M. Performance of the LAMBDA Method for Fast GPS Ambiguity Resolution. J. Navig. 1997, 44, 373–383. [Google Scholar] [CrossRef]
- Zhang, Y.; Kubo, N.; Chen, J.; Wang, J.; Wang, H. Initial Positioning Assessment of BDS New Satellites and New Signals. Remote Sens. 2019, 11, 1320. [Google Scholar] [CrossRef]
- Li, X.; Zhang, X.; Ge, M. Regional reference network augmented precise point positioning for instantaneous ambiguity resolution. J. Geodesy 2011, 85, 151–158. [Google Scholar] [CrossRef]
- Lu, C.; Li, X.; Cheng, J.; Dick, G.; Ge, M.; Wickert, J.; Schuh, H. Real-Time Tropospheric Delay Retrieval from Multi-GNSS PPP Ambiguity Resolution: Validation with Final Troposphere Products and a Numerical Weather Model. Remote Sens. 2018, 10, 481. [Google Scholar] [CrossRef]
- Wang, E.; Song, W.; Zhang, Y.; Shi, X.; Wang, Z.; Xu, S.; Shu, W. Evaluation of BDS/GPS Multi-Frequency RTK Positioning Performance under Different Baseline Lengths. Remote Sens. 2022, 14, 3561. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Option | Setting |
|---|---|
| Elevation mask | 15° |
| SNR 1 | 30 dB |
| PDOP 2 | 20 |
| Code precision 3 | 0.3 m |
| Phase precision 3 | 0.003 m |
| Ionosphere delay for SPP 4 | Klobuchar model |
| Troposphere delay for SPP | Saastamoinen model with VMF1 mapping function |
| DD ionosphere delay | Estimated as random walk parameter |
| DD troposphere delay | Estimated as random walk parameter |
| Fix elevation mask 5 | 20° |
| AR mode | Continuous |
| Baseline | Scheme 1 | Scheme 2 | Scheme 3 |
|---|---|---|---|
| HZDQ-HZLA | 81.3% | 87.5% | 87.5% |
| HZDQ-HZXS | 83.0% | 100.0% | 92.0% |
| HZXS-HZLA | 81.3% | 98.0% | 96.0% |
| WHJA-EZEC | 87.5% | 89.6% | 95.8% |
| EZEC-WHJX | 89.6% | 97.9% | 100.0% |
| WHJX-WHJA | 72.9% | 70.8% | 81.3% |
| Baseline | Scheme 2 | Scheme 3 |
|---|---|---|
| HZDQ-HZLA | 36.00 s | 42.85 s |
| HZDQ-HZXS | 32.74 s | 40.91 s |
| HZXS-HZLA | 34.14 s | 42.77 s |
| WHJA-EZEC | 32.07 s | 40.61 s |
| EZEC-WHJX | 30.33 s | 39.17 s |
| WHJX-WHJA | 32.23 s | 40.79 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dang, X.; Yin, X.; Zhang, Y.; Gao, C.; Wu, J.; Liu, Y. Improved Medium Baseline RTK Positioning Performance Based on BDS/Galileo/GPS Triple-Frequency-Only Observations. Remote Sens. 2023, 15, 5198. https://doi.org/10.3390/rs15215198
Dang X, Yin X, Zhang Y, Gao C, Wu J, Liu Y. Improved Medium Baseline RTK Positioning Performance Based on BDS/Galileo/GPS Triple-Frequency-Only Observations. Remote Sensing. 2023; 15(21):5198. https://doi.org/10.3390/rs15215198
Chicago/Turabian StyleDang, Xifeng, Xiao Yin, Yize Zhang, Chengfa Gao, Jincheng Wu, and Yongqiang Liu. 2023. "Improved Medium Baseline RTK Positioning Performance Based on BDS/Galileo/GPS Triple-Frequency-Only Observations" Remote Sensing 15, no. 21: 5198. https://doi.org/10.3390/rs15215198