

The Evaluation of FY-3E Hyperspectral Infrared Atmospheric Sounder-II Long-Wave Temperature Sounding Channels


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials
2.1. CMA-GFS Model and Evaluation Method
2.2. HIRAS-II Observations
3. Data Processing Method
3.1. Data Preprocessing of HIRAS-II
3.2. Quality Control of HIRAS-II Data
4. Results
4.1. Analysis the Consistency of Each FOV
4.2. Variation in Bias with Scan Position
4.3. Diurnal Variation in Bias
4.4. Variation in Bias with Latitude and the Ascending/Descending Orbits
5. Conclusions
- (1)
- The O-B bias of the selected LW spectrum is between ±1.0 K, except for the absorption peak, and the standard deviations of FOV1, FOV2, FOV4, FOV5, and FOV7 are stable and change little with the spectrum. The standard deviation of all FOVs is the closest, and the value is the smallest in the 670.625~705 spectral band, which is less than 0.4 K (excluding FOV9).
- (2)
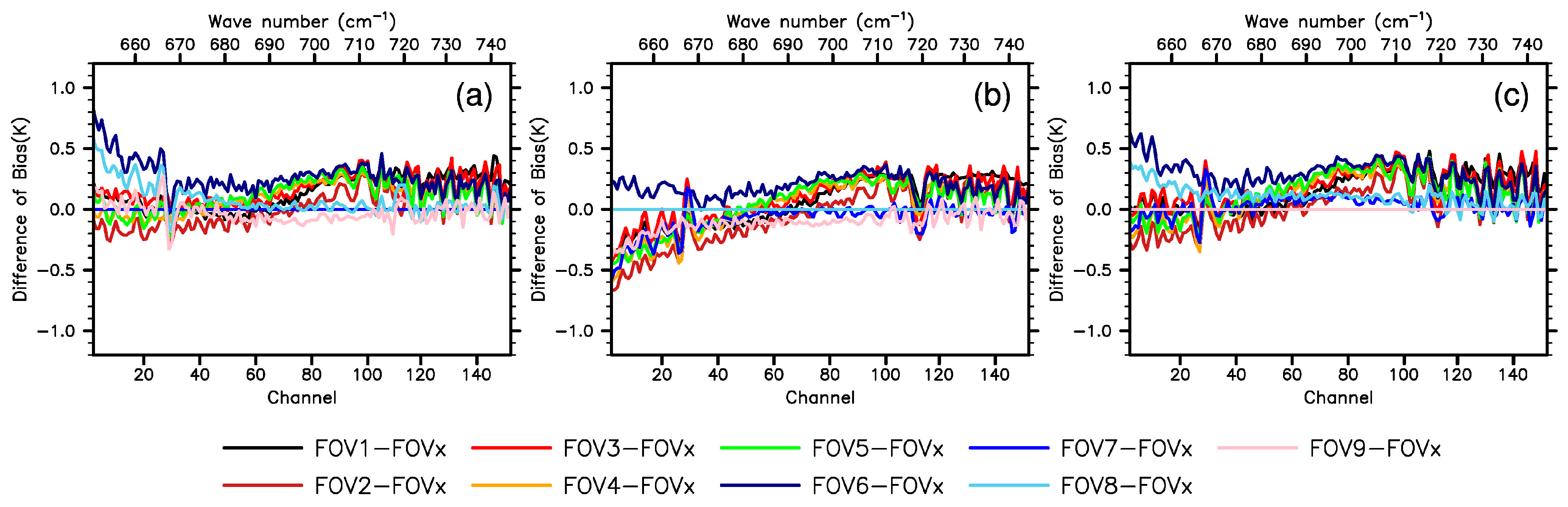
- The O-B biases between the FOV4, FOV5, and other FOVs have good consistency within the LW spectral range; the biases of FOV1, FOV2, and other FOVs show secondary consistency.
- (3)
- The bias variation trends in the stratospheric channels are consistent with the change in FOR, and the biases of the tropospheric channels on both sides of the scan line are greater than those of the stratosphere channels. The biases of FOV1 and FOV4 change little with the scanning positions, and the biases of FOV2 and FOV5 in the tropospheric channels change monotonically with the increase in the scanning points, but the change amplitudes are smaller than those of other FOVs.
- (4)
- The differences in O-Bs among the LW channels during the day, the line of dawn and dusk, and night are small, and the changes are relatively similar. The difference in the standard deviations of O-Bs in the three cases is less than 0.1 K. The O-Bs of two typical channels (channels 14 and 47) in the stratosphere have disturbances at a few times, whereas the O-Bs are much more stable in time series in the tropospheric channels. The standard deviations of the O-Bs in the four channels are basically unchanged with time and stable within 0.4 K.
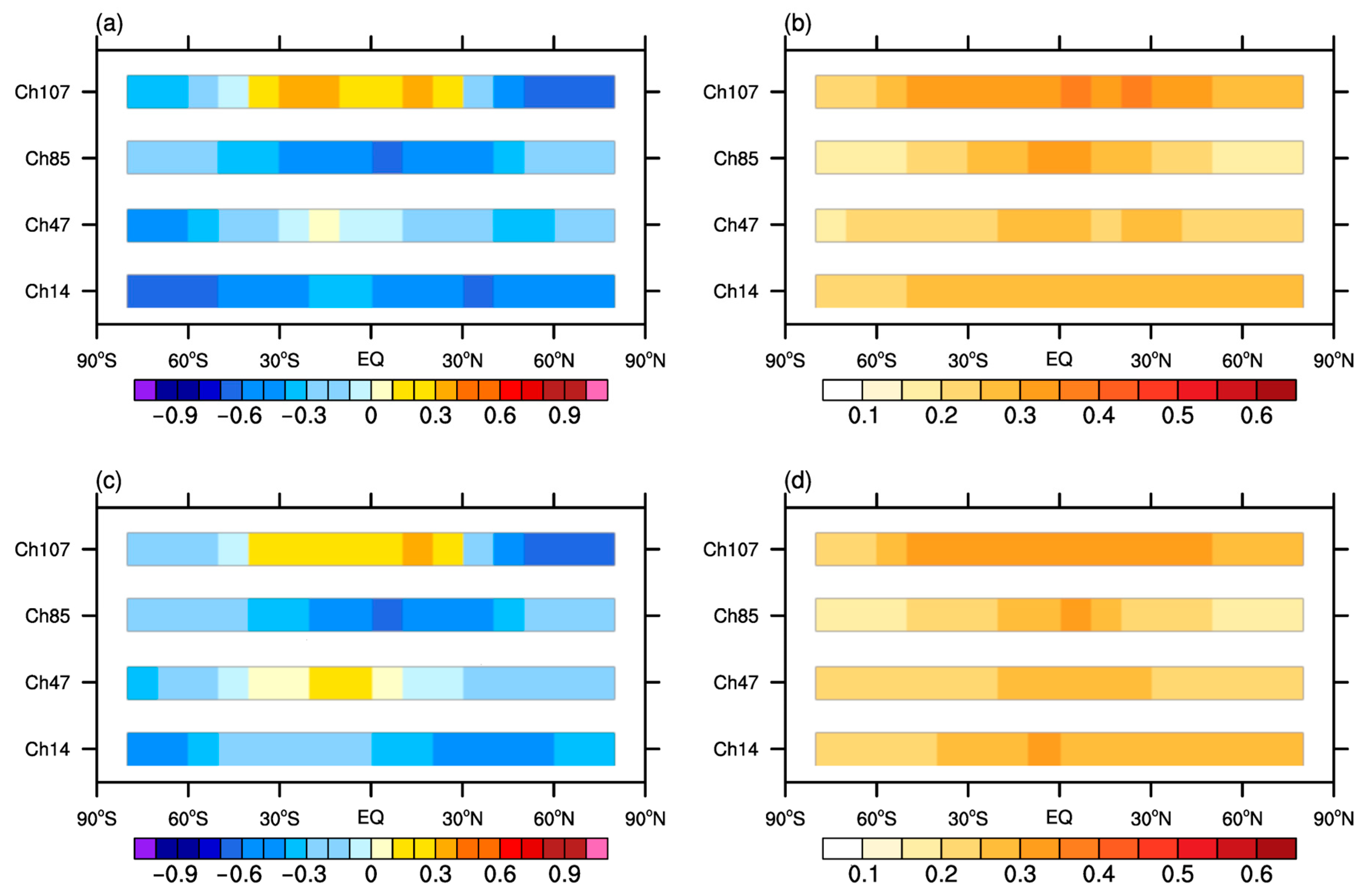
- (5)
- The O-Bs of different channels show the characteristics of changing with the latitude band, the standard deviations of O-B is greater at low latitudes than at high latitudes. The negative biases of upper channels 14 and 47 in the descending orbit stage are generally smaller than those in the ascending stage, while the bias differences of tropospheric channels 85 and 107 between the ascending and descending orbits are small and less than 0.1 K. The standard deviations of O-Bs between the ascending and descending orbits are not much different.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Eyre, J.R.; Bell, W.; Cotton, J.; English, S.J.; Forsythe, M.; Healy, S.B.; Pavelin, E.G. Assimilation of satellite data in numerical weather prediction. Part II: Recent years. Q. J. R. Meteorl. Soc. 2022, 148, 521–556. [Google Scholar] [CrossRef]
- Bauer, P.; Thorpe, A.; Brunet, G. The quiet revolution of numerical weather prediction. Nature 2015, 525, 47–55. [Google Scholar] [CrossRef] [PubMed]
- Eyre, J.R.; English, S.J.; Forsythe, M. Assimilation of satellite data in numerical weather prediction. Part I: The early years. Q. J. R. Meteor. Soc. 2019, 146, 49–68. [Google Scholar] [CrossRef]
- Bormann, N.; Lawrence, H.; Farnan, J. Global Observing System Experiments in the ECMWF Assimilation System. ECMWF Technical Memorandum 839. 2019. Available online: https://www.ecmwf.int/sites/default/files/elibrary/2019/18859-global-observing-system-experiments-ecmwf-assimilation-system.pdf (accessed on 10 September 2023).
- Menzel, W.P.; Schmit, T.J.; Zhang, P.; Li, J. Satellite-Based Atmospheric Infrared Sounder Development and Applications. Bull. Amer. Meteor. Soc. 2018, 99, 583–603. [Google Scholar] [CrossRef]
- Chahine, M.T.; Pagano, T.S.; Aumann, H.H.; Atlas, R.; Barnet, C.; Blaisdell, J.; Chen, L.; Divakarla, M.; Fetzer, E.J.; Goldberg, M.; et al. AIRS: Improving weather forecasting and providing new data on greenhouse gases. Bull. Amer. Meteor. Soc. 2006, 87, 911–926. [Google Scholar] [CrossRef]
- Klaes, K.D.; Cohen, M.; Buhler, Y.; Schluessel, P.; Munro, R.; Luntama, J.P.; Von Engelin, A.; Clerigh, E.O.; Bonekamp, H.; Ackermann, J.; et al. An Introduction to the EUMETSAT Polar system. Bull. Amer. Meteor. Soc. 2007, 88, 1085–1096. [Google Scholar] [CrossRef]
- Noh, Y.C.; Huang, H.L.; Goldberg, M.D. Refinement of CrIS Channel Selection for Global Data Assimilation and Its Impact on the Global Weather Forecast. Weather. Forecast. 2021, 36, 1405–1429. [Google Scholar] [CrossRef]
- Wu, C.Q.; Qi, C.L.; Hu, X.Q.; Gu, M.J.; Yang, T.H.; Xu, H.L.; Lee, L.R.; Yang, Z.D.; Zhang, P. FY-3D HIRAS Radiometric Calibration and Accuracy Assessment. IEEE Trans. Geosci. Remote Sens. 2020, 99, 1–12. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, Z.; Wei, C.; Lu, F.; Guo, Q. Introducing the New Generation of Chinese Geostationary Weather Satellites, Fengyun-4. Bull. Amer. Meteor. Soc. 2017, 98, 1637–1658. [Google Scholar] [CrossRef]
- Aumann, H.H.; Chahine, M.T.; Gautier, C.; Goldberg, M.D.; Kalnay, E.; McMillin, L.M.; Revercomb, H.; Rosenkranz, P.W.; Smith, W.L.; Staelin, D.H.; et al. AIRS/AMSU/HSB on the Aqua mission: Design, science objectives, data products, and processing systems. IEEE Trans. Geosci. Remote Sens. 2003, 41, 253–264. [Google Scholar] [CrossRef]
- Wang, X.; Zou, X. Quality Assessments of Chinese FengYun-3B Microwave Temperature Sounder (MWTS) Measurements. IEEE Trans. Geosci. Remote Sens. 2012, 50, 4875–4884. [Google Scholar] [CrossRef]
- Lu, Q.; Bell, W.; Bauer, P.; Bormann, N.; Peubey, C. An evaluation of FY-3A satellite data for numerical weather prediction. Q. J. R. Meteorol. Soc. 2011, 137, 1298–1311. [Google Scholar] [CrossRef]
- Amato, U.; Cuomo, V.; Rizzi, R.; Serio, C. Evaluating the effect of the inter-relationships among the different spectral bands on IASI performance. Q. J. R. Meteor. Soc. 1997, 123, 2231–2244. [Google Scholar] [CrossRef]
- Le Marshall, J.; Jung, J.; Derber, J.; Chahine, M.; Treadon, R.; Lord, S.J.; Goldberg, M.; Wolf, W.; Liu, H.C.; Joiner, J.; et al. Improving Global Analysis and Forecasting with AIRS. Bull. Amer. Meteor. Soc. 2006, 87, 891–895. [Google Scholar] [CrossRef]
- Hilton, F.; Atkinson, N.C.; English, S.J.; Eyre, J.R. Assimilation of IASI at the Met Office and assessment of its impact through observing system experiments. Q. J. R. Meteorl. Soc. 2009, 135, 495–505. [Google Scholar] [CrossRef]
- Zhang, P.; Lu, Q.F.; Hu, X.Q.; Gu, S.Y.; Yang, L.; Min, M.; Chen, L.; Xu, N.; Sun, L.; Bai, W.G.; et al. Latest Progress of the Chinese Meteorological Satellite Program and Core Data Processing Technologies. Adv. Atmos. Sci. 2019, 36, 1027–1045. [Google Scholar] [CrossRef]
- Qi, C.L.; Wu, C.Q.; Hu, X.Q.; Xu, H.; Lee, L.; Zhou, F.C.; Gu, M.G.; Yang, T.H.; Shao, C.Y.; Yang, Z.D.; et al. High Spectral Infrared Atmospheric Sounder (HIRAS): System Overview and On-Orbit Performance Assessment. IEEE Trans. Geosci. Remote Sens. 2020, 58, 4335–4352. [Google Scholar] [CrossRef]
- Carminati, F.; Xiao, X.; Lu, Q.; Atkinson, N.; Hocking, J. Assessment of the Hyperspectral Infrared Atmospheric Sounder (HIRAS). Remote Sens. 2019, 11, 2950. [Google Scholar] [CrossRef]
- Zhang, P.; Hu, X.Q.; Lu, Q.F.; Zhu, A.J.; Lin, M.Y.; Sun, L.; Chen, L.; Xu, N. FY-3E: The first operational meteorological satellite mission in an early morning orbit. Adv. Atmos. Sci. 2021, 39, 1–8. [Google Scholar] [CrossRef]
- Yang, T.H.; Gu, M.J.; Shao, C.Y.; Wu, C.Q.; Qi, C.L.; Hu, X.Q. Nonlinearity correction of FY-3E HIRAS-II in pre-launch thermal vacuum calibration tests. J. Infrared Millim. Waves. 2022, 41, 597–607. [Google Scholar] [CrossRef]
- Zhang, C.; Qi, C.; Yang, T.; Gu, M.; Zhang, P.; Lee, L.; Xie, M.; Hu, X. Evaluation of FY-3E/HIRAS-II Radiometric Calibration Accuracy Based on OMB Analysis. Remote Sens. 2022, 14, 3222. [Google Scholar] [CrossRef]
- Chen, D.H.; Xue, J.S.; Yang, X.S.; Zhang, H.L.; Shen, X.S.; Hu, J.L.; Wang, Y.; Ji, L.R.; Chen, J.B. New generation of multi-scale NWP system (GRAPES): General scientific design. Chin. Sci. Bull. 2008, 53, 3433–3445. [Google Scholar] [CrossRef]
- Xue, J.S.; Zhuang, S.Y.; Zhu, G.F.; Zhang, H.; Liu, Z.Q.; Liu, Y.; Zhuang, Z.R. Scientific design and preliminary results of three-dimensional variational data assimilation system of GRAPES. Chin. Sci. Bull. 2008, 53, 3446–3457. [Google Scholar] [CrossRef]
- Zhang, L.; Liu, Y.; Liu, Y.; Gong, J.; Lu, H.; Jin, Z.; Tian, W.; Liu, G.; Zhou, B.; Zhao, B. The operational global four-dimensional variational data assimilation system at the China Meteorological Administration. Q. J. R. Meteorol. Soc. 2019, 145, 1882–1896. [Google Scholar] [CrossRef]
- Saunders, R.; Hocking, J.; Turner, E.; Rayer, P.; Rundle, D.; Brunel, P.; Vidot, J.; Roquet, P.; Matricardi, M.; Geer, A.; et al. An update on the RTTOV fast radiative transfer model (currently at version 12). Geosci. Model Dev. 2018, 11, 2717–2737. [Google Scholar] [CrossRef]
- Li, X.; Zou, X.L. Bias characterization of CrIS radiances at 399 selected channels with respect to NWP model simulations. Atmos. Res. 2017, 196, 164–181. [Google Scholar] [CrossRef]
- McNally, A.P.; Watts, P.D. A cloud detection algorithm for high-spectral-resolution infrared sounders. Q. J. R. Meteorol. Soc. 2003, 129, 3411–3423. [Google Scholar] [CrossRef]
- Goldberg, M.D.; Qu, Y.; McMillin, L.M.; Wolf, W.; Zhou, L.H.; Divakarla, M. AIRS near-real-time products and algorithms in support of operational numerical weather prediction. IEEE Trans. Geosci. Remote Sens. 2003, 41, 379–389. [Google Scholar] [CrossRef]
- Collard, A.D.; McNally, A.P. The assimilation of Infrared Atmospheric Sounding Interferometer radiances at ECMWF. Q. J. R. Meteorol. Soc. 2009, 135, 1044–1058. [Google Scholar] [CrossRef]
- McNally, A.P.; Watts, P.D.; Smith, A.J.; Engelen, R.; Kelly, G.A.; Thépaut, J.N.; Matricardi, M. The assimilation of AIRS radiance data at ECMWF. Q. J. R. Meteorol. Soc. 2006, 132, 935–957. [Google Scholar] [CrossRef]
- Deng, S.; Li, G.; Zhang, H. Objective Determination scheme of Threshold in High-spectral-resolution infrared cloud detection. Meteorol. Mon. 2017, 43, 213–220. [Google Scholar]
- Harris, B.A.; Kelly, G. A satellite radiance-bias correction scheme for data assimilation. Q. J. R. Meteorol. Soc. 2001, 127, 1453–1468. [Google Scholar] [CrossRef]
- Liu, Z.Q.; Zhang, F.Y.; Wu, X.B.; Xue, J.H. A regional atovs radiance-bias correction scheme for rediance assimilation. Acta Meteorol. Sin. 2007, 1, 113–123. [Google Scholar] [CrossRef]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, J.; Ma, G.; Liu, G.; Li, J.; Zhang, H. The Evaluation of FY-3E Hyperspectral Infrared Atmospheric Sounder-II Long-Wave Temperature Sounding Channels. Remote Sens. 2023, 15, 5525. https://doi.org/10.3390/rs15235525
Huang J, Ma G, Liu G, Li J, Zhang H. The Evaluation of FY-3E Hyperspectral Infrared Atmospheric Sounder-II Long-Wave Temperature Sounding Channels. Remote Sensing. 2023; 15(23):5525. https://doi.org/10.3390/rs15235525
Chicago/Turabian StyleHuang, Jing, Gang Ma, Guiqing Liu, Juan Li, and Hua Zhang. 2023. "The Evaluation of FY-3E Hyperspectral Infrared Atmospheric Sounder-II Long-Wave Temperature Sounding Channels" Remote Sensing 15, no. 23: 5525. https://doi.org/10.3390/rs15235525
APA StyleHuang, J., Ma, G., Liu, G., Li, J., & Zhang, H. (2023). The Evaluation of FY-3E Hyperspectral Infrared Atmospheric Sounder-II Long-Wave Temperature Sounding Channels. Remote Sensing, 15(23), 5525. https://doi.org/10.3390/rs15235525