
Novel Grid Collection and Management Model of Remote Sensing Change Detection Samples

 , , ,
, , ,  ,
,
Abstract
:1. Introduction
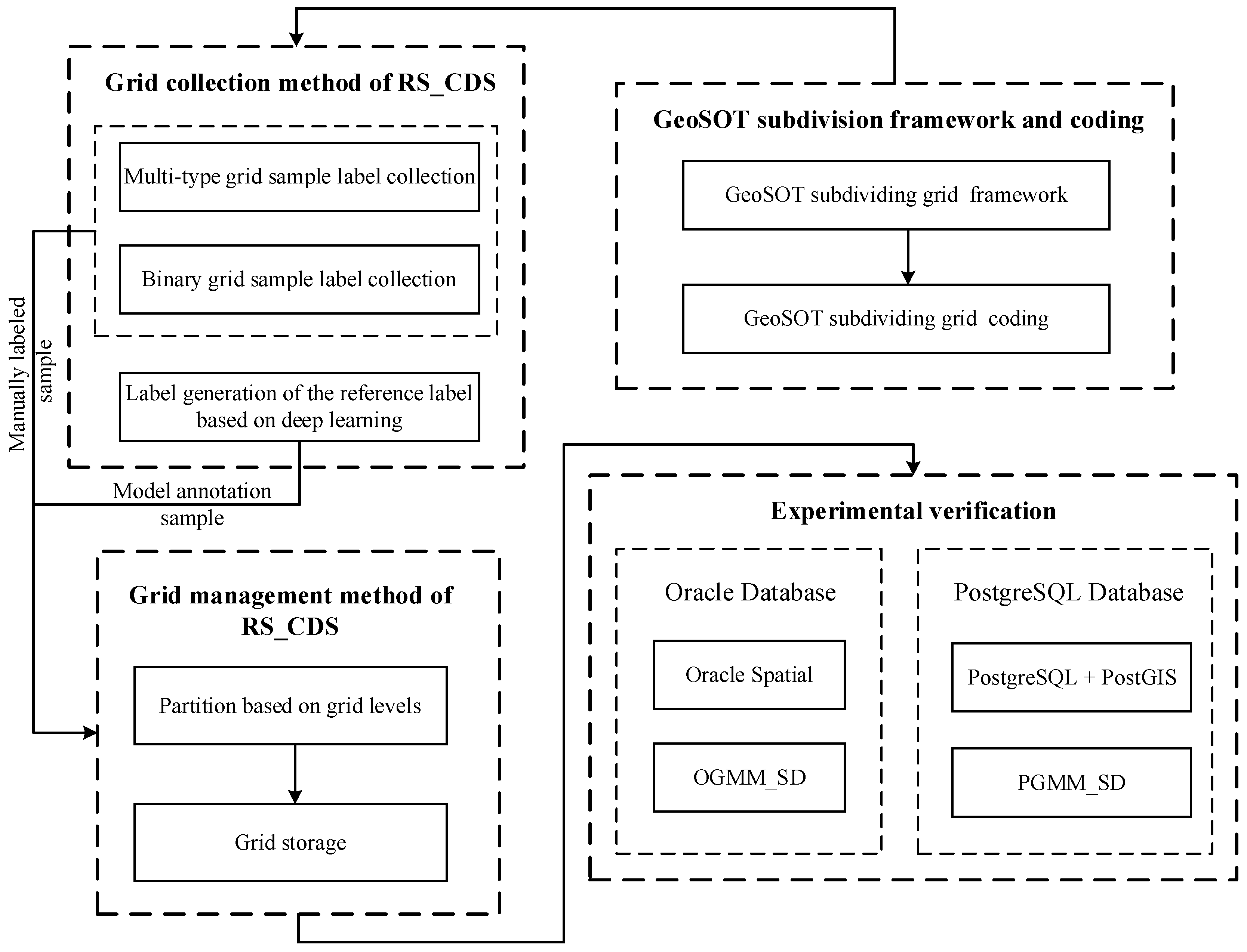
2. Materials and Methods
2.1. GeoSOT Subdivision Framework and Coding
2.2. Grid Collection Method of RS_CDS (GCM-SD)
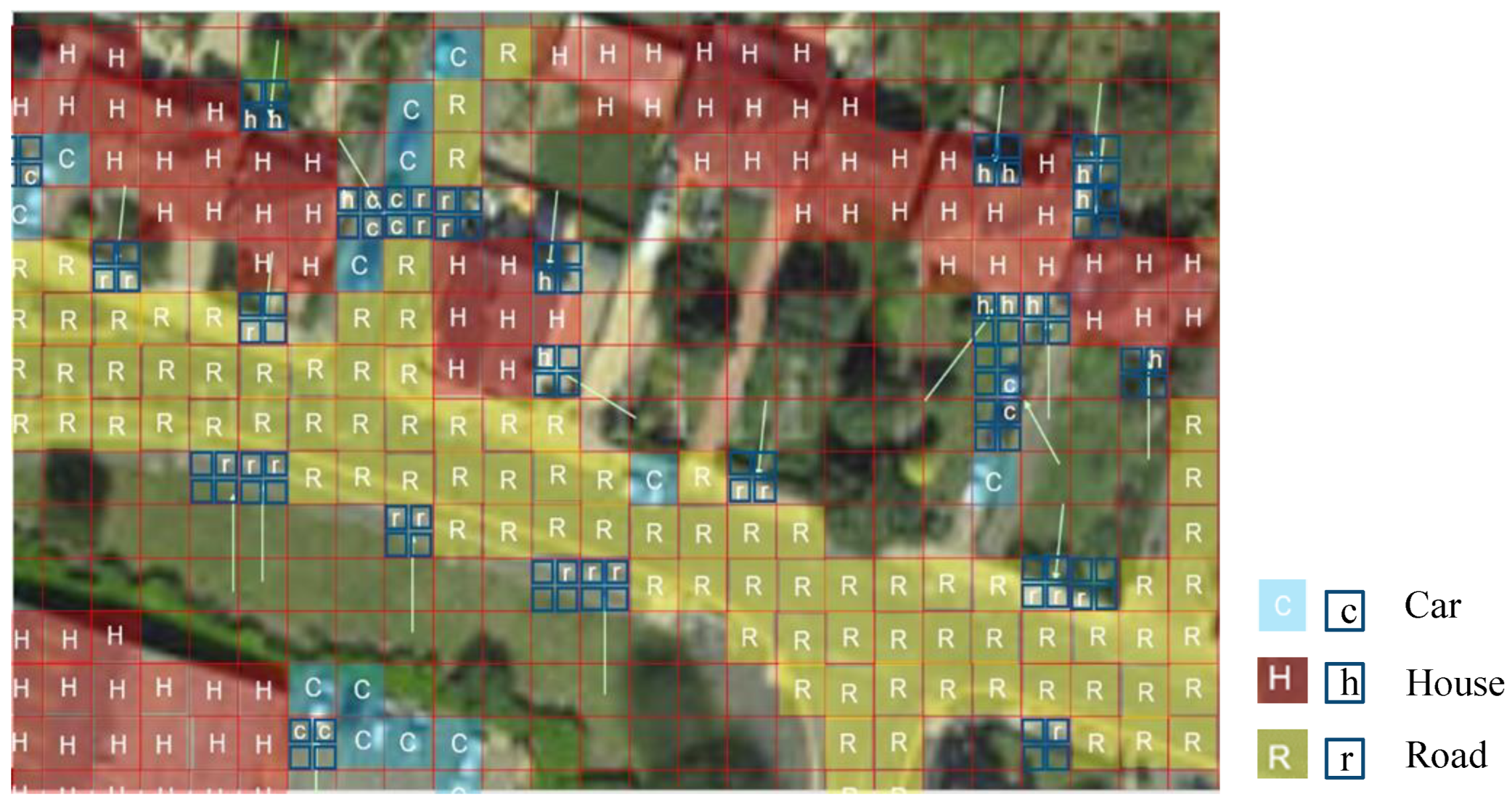
2.2.1. Multi-Type Grid Sample Label Collection
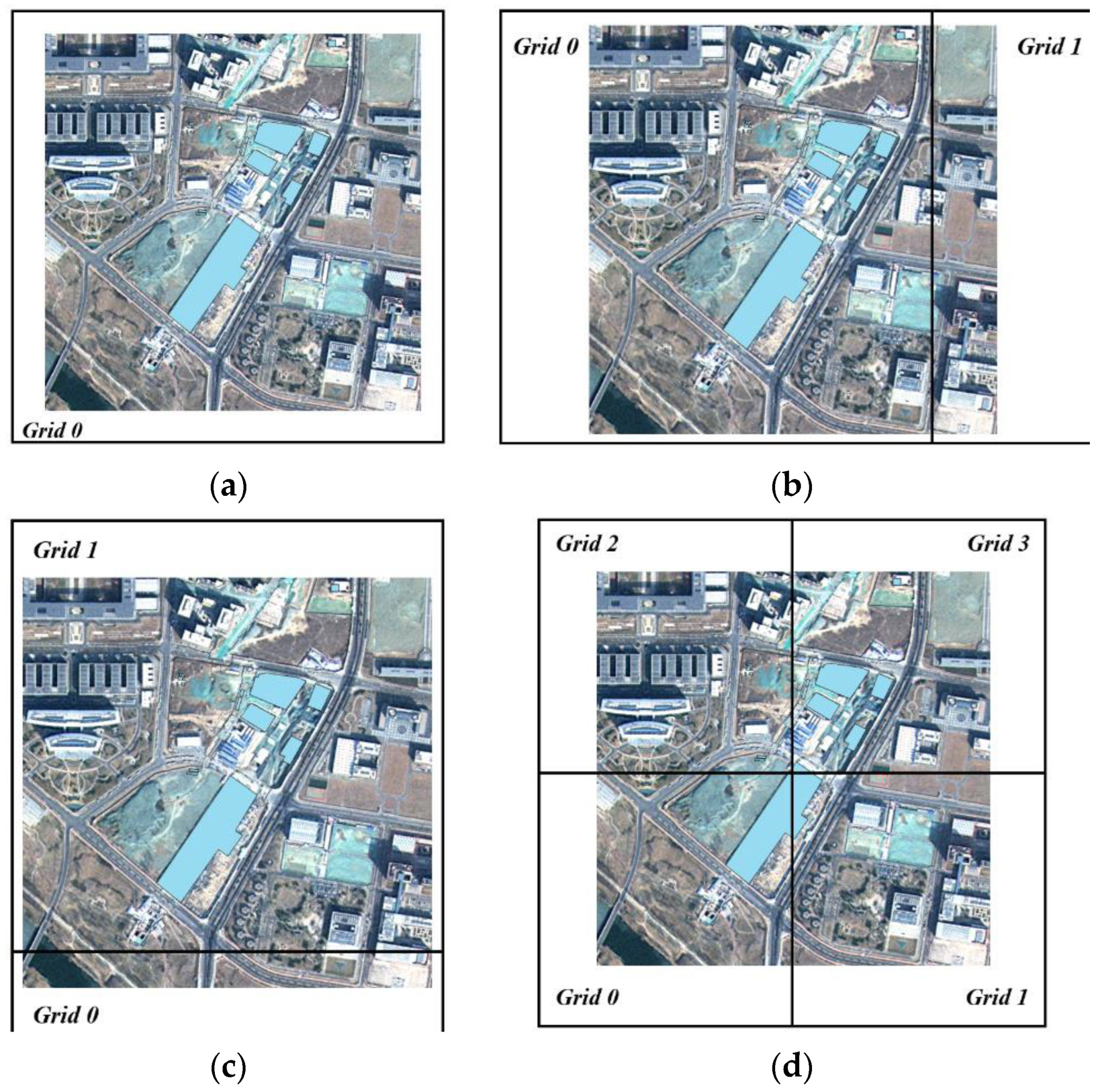
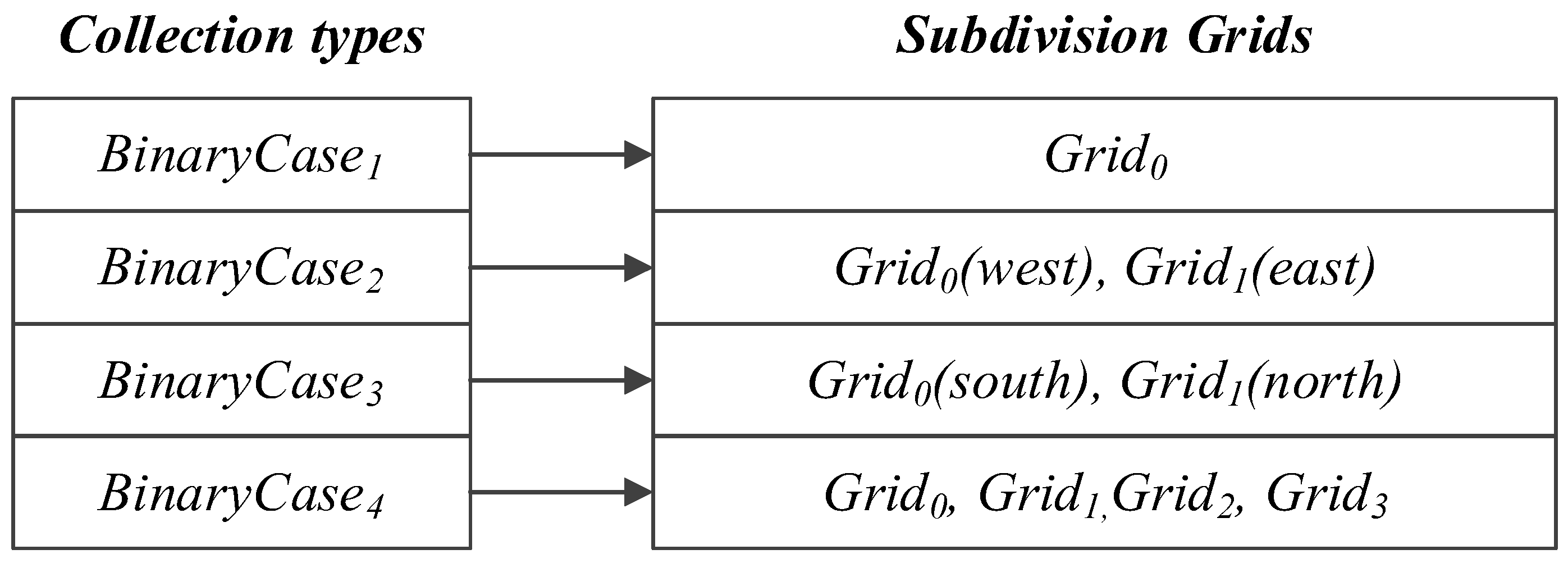
2.2.2. Binary Grid Sample Label Collection
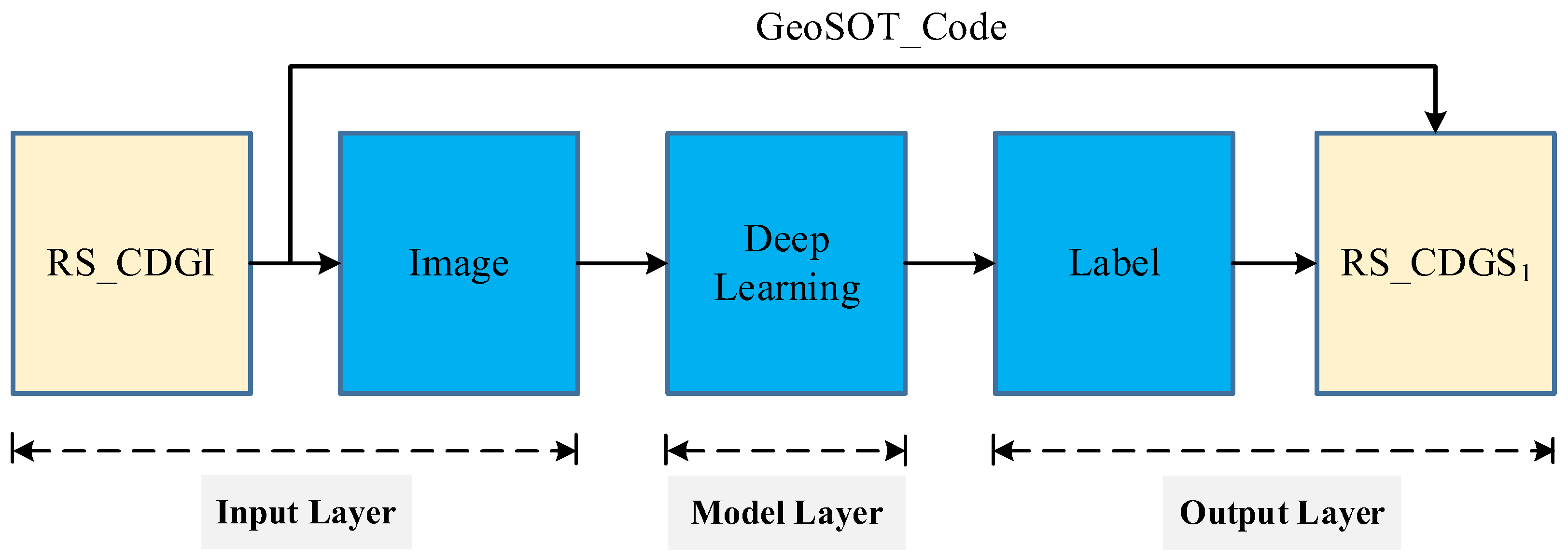
2.2.3. Label Generation of Reference Label Based on Deep Learning
2.3. Grid Management Method of RS_CDS (GMM-SD)
2.3.1. Partition Based on Grid Levels
- GeoSOT grid first-level partition: establish grid subdivision units at the research area level and allocate the grid code ID of the research area under the research area subdivision level ). That is, establish multi-level grid storage units at the national, provincial, municipal, district, and street levels, and directly reach the samples based on to realize efficient retrieval. At the same time, the grid location expression avoids the ambiguity of multiple names in one location.
- GeoSOT grid second-level partition: establish a grid subdivision unit at the sample level, and allocate the sample grid code ID under the sample subdivision level .
2.3.2. Grid Storage
3. Experiment
3.1. Experimental Data and Test Environment
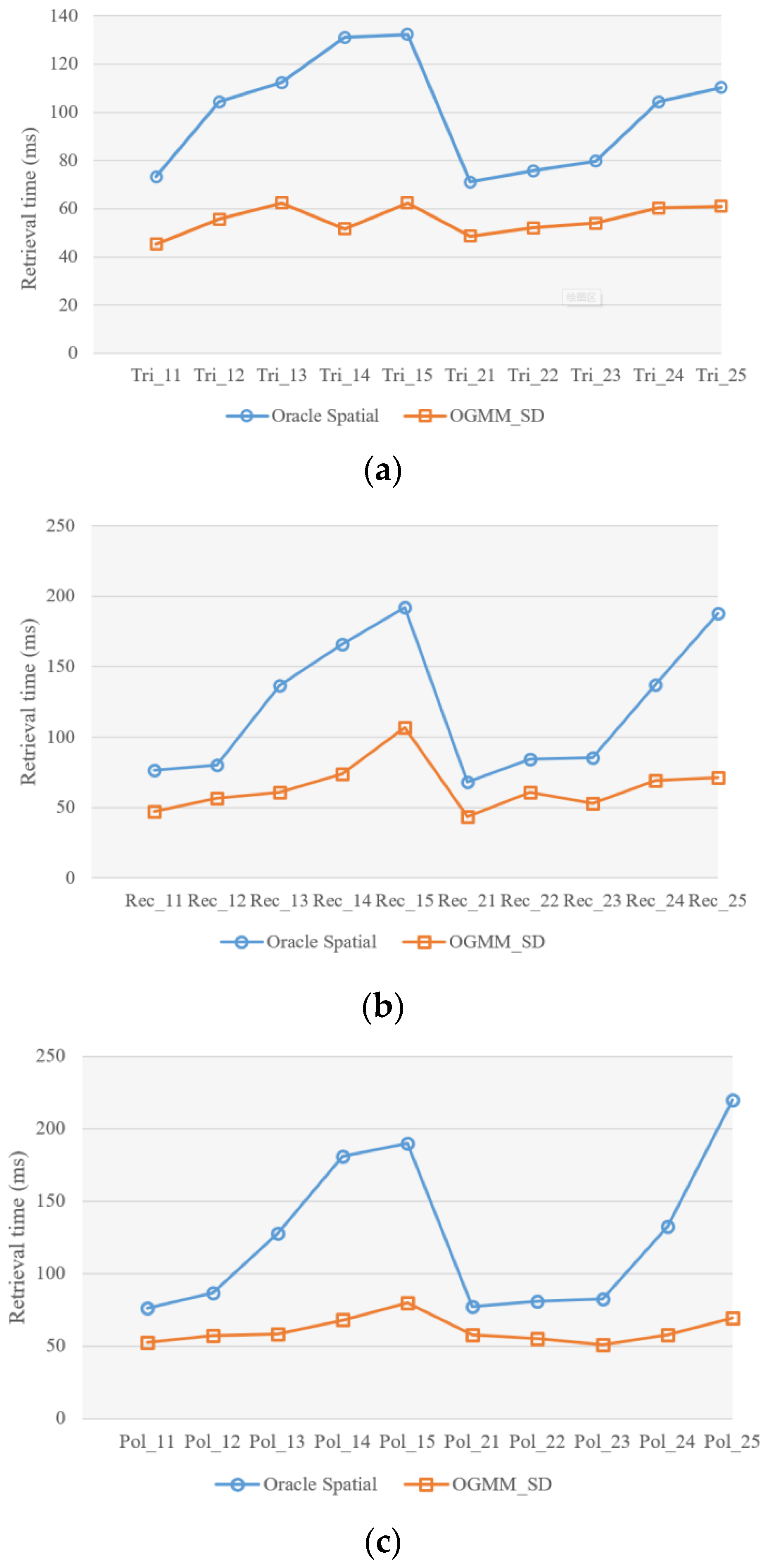
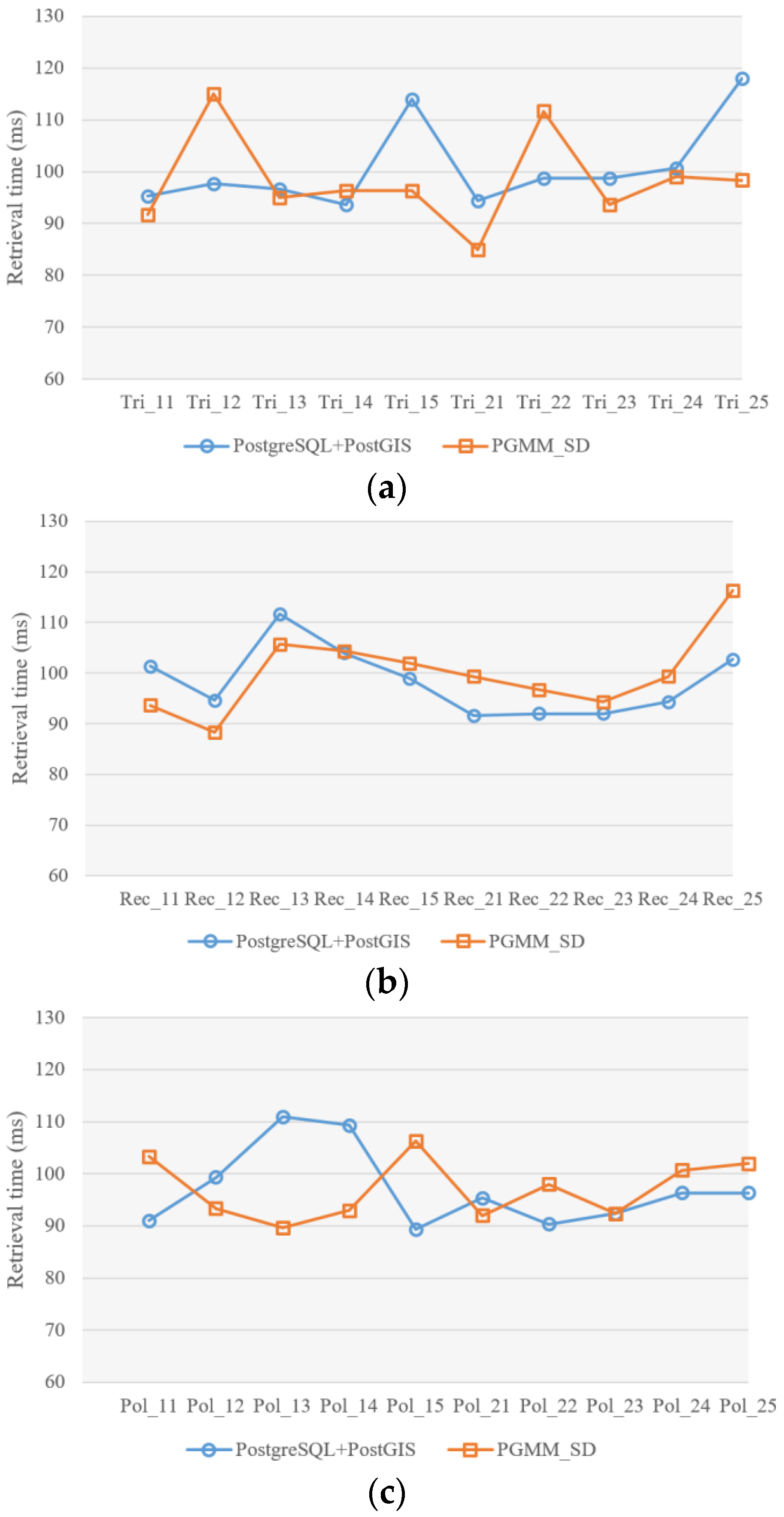
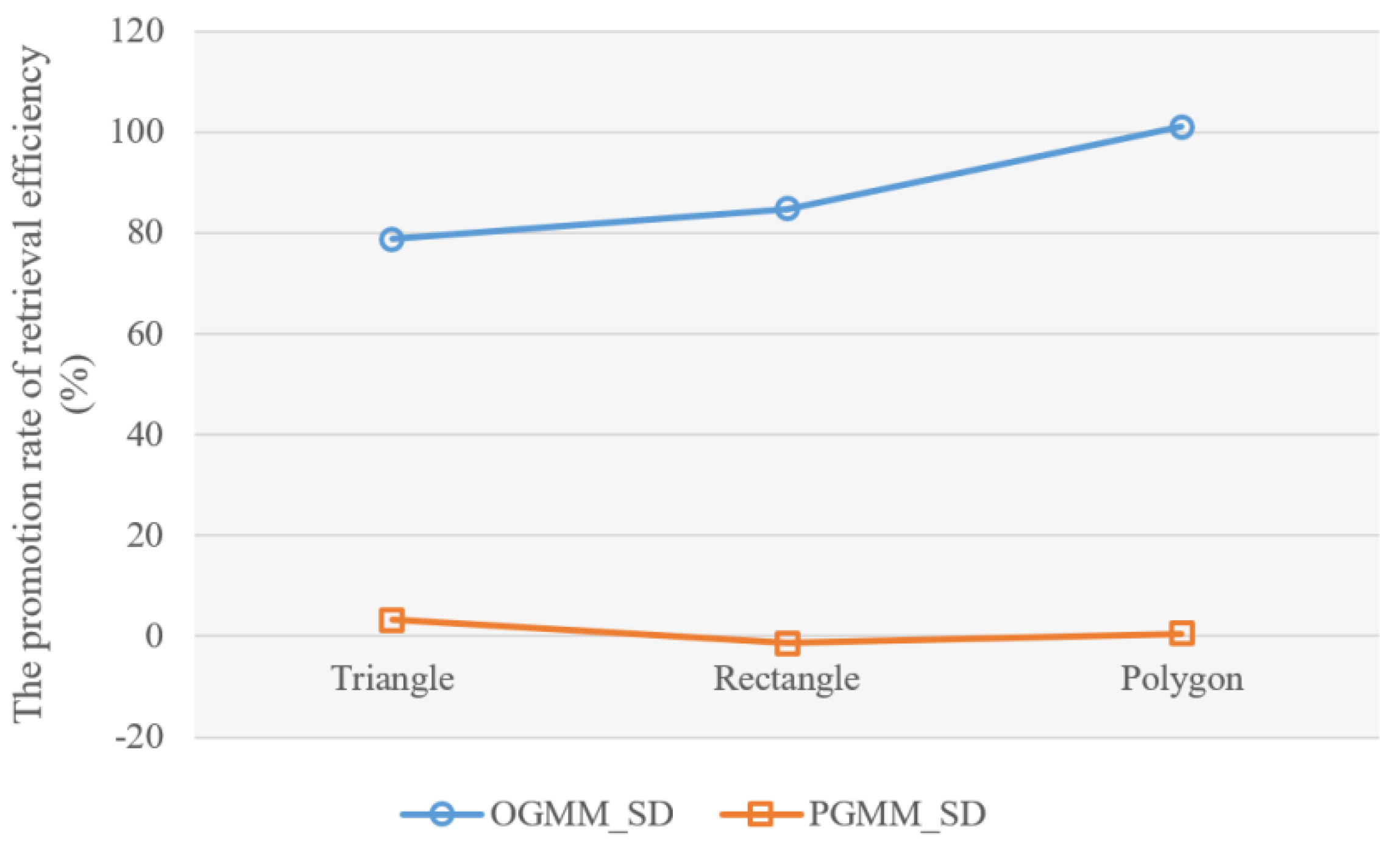
3.2. Experiment and Analysis of Retrieval Efficiency
- The triangular research area was defined as , where is longitude, is latitude, and is the span.
- The rectangular research area was defined as , where is longitude, is latitude, and is the span.
- The polygonal research area was defined as , where is longitude, is latitude, is span 1, and is span 2.
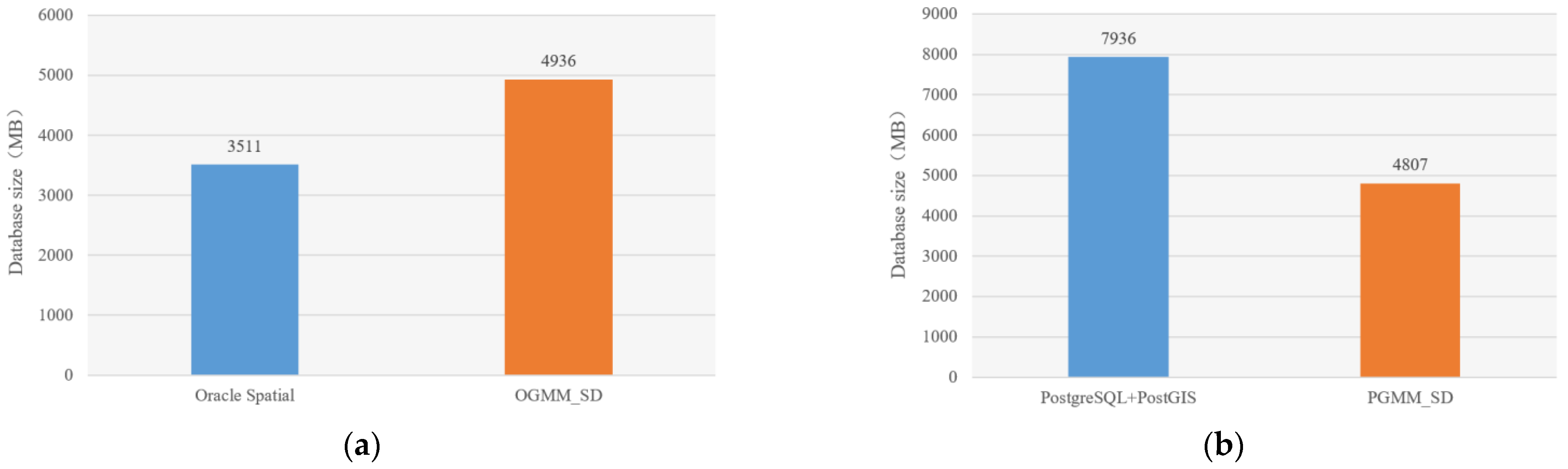
3.3. Database Capacity Comparison
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Akçay, H.G.; Aksoy, S. Building detection using directional spatial constraints. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010; pp. 1932–1935. [Google Scholar]
- Chen, J.; Lu, M.; Chen, X.; Chen, J.; Chen, L. A spectral gradient difference based approach for land cover change detection. ISPRS J. Photogram. Remote Sens. 2013, 85, 1–12. [Google Scholar] [CrossRef]
- Hulley, G.; Veraverbeke, S.; Hook, S. Thermal-based techniques for land cover change detection using a new dynamic modis multispectral emissivity product (mod21). Remote Sens. Environ. 2014, 140, 755–765. [Google Scholar] [CrossRef]
- Huang, M.; Chen, N.; Du, W.; Wen, M.; Zhu, D.; Gong, J. 2021. An on-demand scheme driven by the knowledge of geospatial distribution for large-scale high-resolution impervious surface mapping. GISci. Remote Sens. 2021, 58, 562–586. [Google Scholar] [CrossRef]
- Chen, Z.; Huang, M.; Zhu, D.; Altan, O. Integrating Remote Sensing and a Markov-FLUS Model to Simulate Future Land Use Changes in Hokkaido, Japan. Remote Sens. 2021, 13, 2621. [Google Scholar] [CrossRef]
- Shi, W.; Zhang, M.; Zhang, R.; Chen, S.; Zhan, Z. Change detection based on artificial intelligence: State-of-the-art and challenges. Remote Sens. 2020, 12, 1688. [Google Scholar] [CrossRef]
- Ma, L.; Liu, Y.; Zhang, X.; Ye, Y.; Yin, G.; Johnson, B.A. Deep learning in remote sensing applications: A meta-analysis and review. ISPRS J. Photogram. Remote Sens. 2019, 152, 166–177. [Google Scholar] [CrossRef]
- Maggiori, E.; Tarabalka, Y.; Charpiat, G.; Alliez, P. Can semantic labeling methods generalize to any city? The inria aerial image labeling benchmark. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017. [Google Scholar]
- Xu, Y.; Du, B.; Zhang, L.; Cerra, D.; Pato, M.; Carmon, E.; Prasad, S.; Yokoya, N.; Hänsch, R.; Le Saux, B. Advanced multi-sensor optical remote sensing for urban land use and land cover classification: Outcome of the 2018 IEEE GRSS Data Fusion Contest. IEEE J. Select. Topic. Appl. Earth Obs. Remote Sens. 2018, 99, 1–16. [Google Scholar] [CrossRef]
- Hong, D.; Hu, J.; Yao, J.; Chanussot, J.; Zhu, X.X. Multimodal remote sensing benchmark datasets for land cover classification with a shared and specific feature learning model. ISPRS J. Photogram. Remote Sens. 2021, 178, 68–80. [Google Scholar] [CrossRef] [PubMed]
- Okujeni, A.; van der Linden, S.; Hostert, P. Berlin-Urban-Gradient Dataset 2009-an Enmap Preparatory Flight Campaign; EnMAP Consortium: Potsdam, Germany, 2016. [Google Scholar]
- Du, X.; Zare, A. Scene label ground truth map for MUUFL Gulfport Data Set. University of Florida: Gainesville, FL, Tech. Rep. 20170417. Available online: http://ufdc.ufl.edu/IR00009711/00001 (accessed on 13 March 2017).
- Goodchild, M.F. Reimagining the history of GIS. Ann. GIS 2018, 24, 1–8. [Google Scholar] [CrossRef]
- Purss, M.; Gibb, R.; Samavati, F.; Peterson, P.; Ben, J. The OGC® discrete global grid system core standard: A framework for rapid geospatial integration. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016. [Google Scholar]
- Robertson, C.; Chaudhuri, C.; Hojati, M.; Roberts, S.A. An integrated environmental analytics system (IDEAS) based on a DGGS. ISPRS J. Photogram. Remote Sens. 2020, 162, 214–228. [Google Scholar] [CrossRef]
- Lin, B.; Zhou, L.; Xu, D.; Zhu, A.X.; Lu, G. A discrete global grid system for earth system modeling. Int. J. Geogr. Inf. Sci. 2017, 32, 711–737. [Google Scholar] [CrossRef]
- Gibb, R.G.; Purss, M.B.J.; Sabeur, Z.; Strobl, P.; Qu, T. Global reference grids for big Earth data. Big Earth Data 2022, 6, 251–255. [Google Scholar] [CrossRef]
- Gray, J.; Chaudhuri, S.; Bosworth, A.; Layman, A.; Reichart, D.; Venkatrao, M.; Pellow, F.; Pirahesh, H. Data Cube: A relational aggregation operator generalizing group-by, cross-tab, and sub-totals. Data Min. Knowl. Discov. 1997, 1, 29–53. [Google Scholar] [CrossRef]
- Rao, J.; Gao, S.; Li, M.; Huang, Q. A privacy-preserving framework for location recommendation using decentralized collaborative machine learning. Trans. GIS 2021, 25, 1153–1175. [Google Scholar] [CrossRef]
- Gu, T.; Feng, K.; Cong, G.; Long, C.; Wang, Z.; Wang, S. The RLR-Tree: A Reinforcement Learning Based R-Tree for Spatial Data. Proc. ACM Manag. Data 2023, 1, 1–26. [Google Scholar] [CrossRef]
- Viloria, A.; Acuña, G.C.; Franco, D.J.A.; Hernández-Palma, H.; Fuentes, J.P.; Rambal, E.P. Integration of data mining techniques to PostgreSQL database manager system. Procedia Comput. Sci. 2019, 155, 575–580. [Google Scholar] [CrossRef]
- Cheng, C.; Ren, F.; Puo, G.; Wang, H.; Chen, B. Introduction to Spatial Information Subdivision and Organization; Science Press: Beijing, China, 2012. (In Chinese) [Google Scholar]
- Shen, J.; Zhang, L.; Chen, M. Topological relations between spherical spatial regions with holes. Int. J. Digital Earth 2020, 13, 429–456. [Google Scholar] [CrossRef]
- Oracle. Oracle Spatial. 2023. Available online: https://docs.oracle.com/en/database/oracle/oracle-database/21/spatl (accessed on 1 September 2023).
- Meyer, T.; Brunn, A. 3D Point Clouds in PostgreSQL/PostGIS for Applications in GIS and Geodesy. GISTAM 2019, 1, 154–163. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | ID | ID | |||
|---|---|---|---|---|---|
| Tri_11 | (−140, −40, 0.05) | Rec_11 | (−140, −40, 0.05) | Pol_11 | (−140, −40, 0.05, 0.025) |
| Tri_12 | (−140, −40, 0.1) | Rec_12 | (−140, −40, 0.1) | Pol_12 | (−140, −40, 0.1, 0.05) |
| Tri_13 | (−140, −40, 0.15) | Rec_13 | (−140, −40, 0.15) | Pol_13 | (−140, −40, 0.15, 0.075) |
| Tri_14 | (−140, −40, 0.2) | Rec_14 | (−140, −40, 0.2) | Pol_14 | (−140, −40, 0.2, 0.1) |
| Tri_15 | (−140, −40, 0.25) | Rec_15 | (−140, −40, 0.25) | Pol_15 | (−140, −40, 0.25, 0.125) |
| Tri_21 | (120, 50, −0.05) | Rec_21 | (120, 50, −0.05) | Pol_21 | (120, 50, −0.05, −0.025) |
| Tri_22 | (120, 50, −0.1) | Rec_22 | (120, 50, −0.1) | Pol_22 | (120, 50, −0.1, −0.05) |
| Tri_23 | (120, 50, −0.15) | Rec_23 | (120, 50, −0.15) | Pol_23 | (120, 50, −0.15, −0.075) |
| Tri_24 | (120, 50, −0.2) | Rec_24 | (120, 50, −0.2) | Pol_24 | (120, 50, −0.2, −0.1) |
| Tri_25 | (120, 50, −0.25) | Rec_25 | (120, 50, −0.25) | Pol_25 | (120, 50, −0.25, −0.125) |
| ID | GGT (ms) | NR | ID | GGT (ms) | NR | ID | GGT (ms) | NR |
|---|---|---|---|---|---|---|---|---|
| Tri_11 | 13.9847 | 22 | Rec_11 | 79.0057 | 42 | Pol_11 | 59.9723 | 38 |
| Tri_12 | 128.1201 | 80 | Rec_12 | 342.9543 | 144 | Pol_12 | 238.2658 | 115 |
| Tri_13 | 286.7505 | 177 | Rec_13 | 553.8344 | 342 | Pol_13 | 630.2579 | 276 |
| Tri_14 | 548.0029 | 304 | Rec_14 | 1154.6569 | 576 | Pol_14 | 828.2052 | 454 |
| Tri_15 | 864.2238 | 474 | Rec_15 | 1634.0458 | 900 | Pol_15 | 1480.9624 | 708 |
| Tri_21 | 25.3898 | 21 | Rec_21 | 48.4677 | 36 | Pol_21 | 15.2665 | 30 |
| Tri_22 | 155.1059 | 79 | Rec_22 | 323.4874 | 144 | Pol_22 | 199.3939 | 114 |
| Tri_23 | 311.2913 | 173 | Rec_23 | 684.4581 | 324 | Pol_23 | 453.3619 | 254 |
| Tri_24 | 633.2543 | 302 | Rec_24 | 1268.4975 | 576 | Pol_24 | 744.8747 | 452 |
| Tri_25 | 757.6348 | 467 | Rec_25 | 1528.6376 | 900 | Pol_25 | 1251.8714 | 708 |
| Triangular Research Areas | Rectangular Research Areas | Polygonal Research Areas | Total Average | |
|---|---|---|---|---|
| OGMM_SD (%) | 78.80 | 84.84 | 101.01 | 88.22 |
| PGMM_SD (%) | 3.26 | −1.40 | 0.58 | 0.81 |
| Database Types | OGMM_SD | PGMM_SD |
|---|---|---|
| 40.59 | −39.43 | |
| 47.63 | 40.24 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, D.; Han, B.; Silva, E.A.; Li, S.; Huang, M.; Ren, F.; Cheng, C. Novel Grid Collection and Management Model of Remote Sensing Change Detection Samples. Remote Sens. 2023, 15, 5528. https://doi.org/10.3390/rs15235528
Zhu D, Han B, Silva EA, Li S, Huang M, Ren F, Cheng C. Novel Grid Collection and Management Model of Remote Sensing Change Detection Samples. Remote Sensing. 2023; 15(23):5528. https://doi.org/10.3390/rs15235528
Chicago/Turabian StyleZhu, Daoye, Bing Han, Elisabete A. Silva, Shuang Li, Min Huang, Fuhu Ren, and Chengqi Cheng. 2023. "Novel Grid Collection and Management Model of Remote Sensing Change Detection Samples" Remote Sensing 15, no. 23: 5528. https://doi.org/10.3390/rs15235528
APA StyleZhu, D., Han, B., Silva, E. A., Li, S., Huang, M., Ren, F., & Cheng, C. (2023). Novel Grid Collection and Management Model of Remote Sensing Change Detection Samples. Remote Sensing, 15(23), 5528. https://doi.org/10.3390/rs15235528