
Antenna Pattern Calibration Method for Phased Array of High-Frequency Surface Wave Radar Based on First-Order Sea Clutter

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Direction-Finding Problem Formulation
2.1. Signal Model
- The sources are narrow-band signals and conform to the far-field point-source model;
- The sources are uncorrelated with each other;
- The noises are additive white Gaussian noise (AWGN) and uncorrelated with the sources.
- is the received signal vector, with M as the number of antennas; and the superscript denotes the transposition;
- is the incoming signal vector, with N as the number of sources;
- is the array manifold matrix, with as the azimuth of the n-th source;
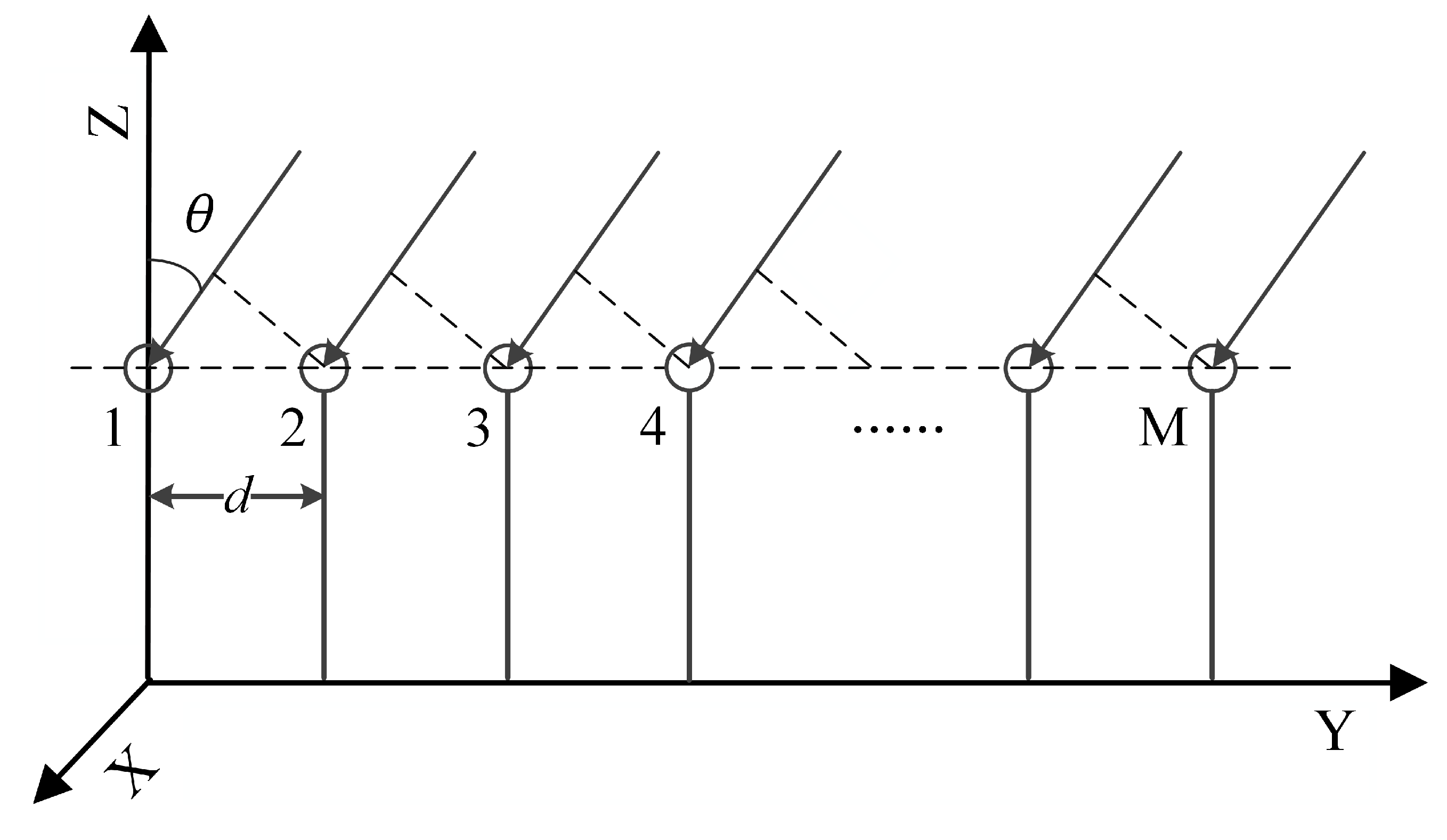
- for the array, with as the radar operating frequency;
- for a uniform linear array (ULA), with d and c representing the antenna spacing and speed of light, respectively;
- is the AWGN with zero mean and variance ().
2.2. MUSIC Algorithm Model
- represents the eigenvalues of , and the first N large eigenvalues are generated by the sources, while the last small eigenvalues are caused by the noises;
- denotes the eigenvector corresponding to the k-th eigenvalue;
- and represent the signal subspace and noise subspace, respectively, and they are orthogonal complement spaces.
3. Performance of the MUSIC Algorithm with Antenna Pattern Distortion
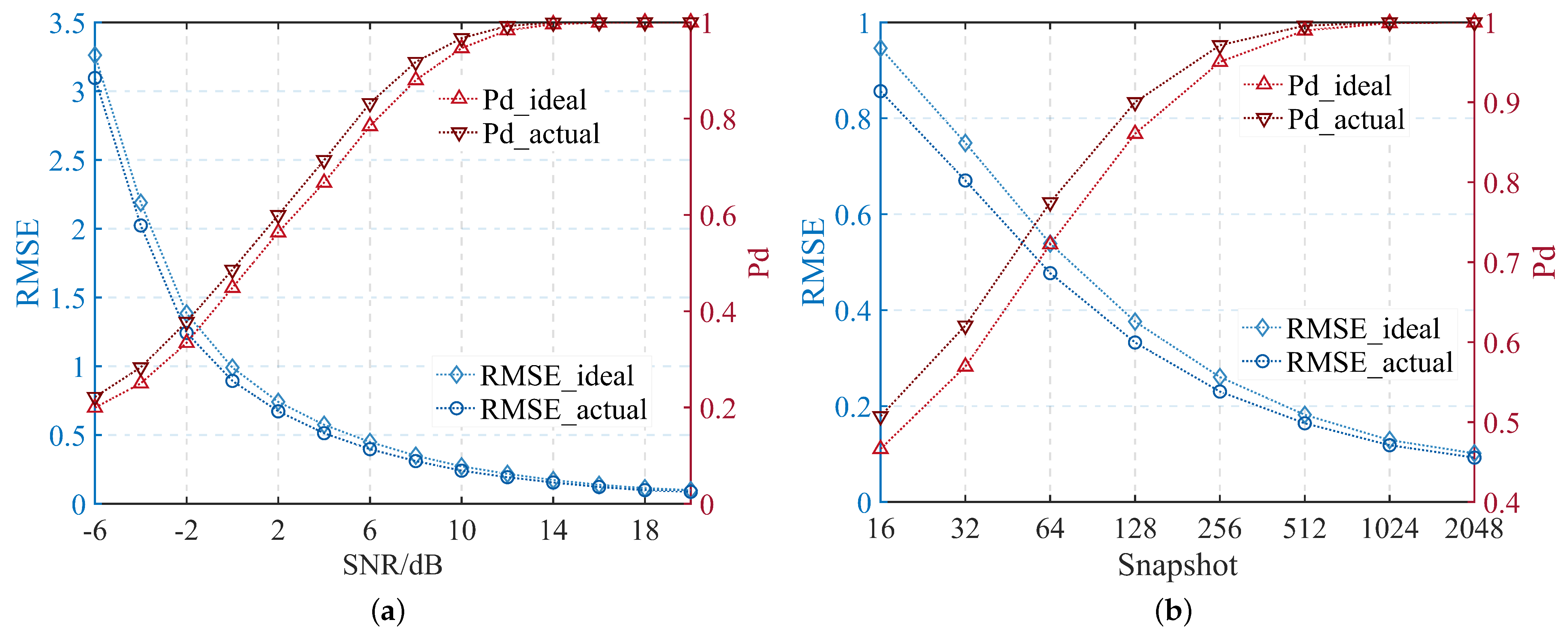
3.1. Estimation Accuracy of the MUSIC Algorithm
3.2. Angular Resolution of the MUSIC Algorithm
- is the zero spectrum of the MUSIC algorithm;
- and are the incident angles of two sources, and is their midpoint;
- , where .
3.3. Comparison of the MUSIC Algorithm’s Performance
- Frequency of operation: MHz;
- Uniform linear array with eight dipole antennas;
- Antenna spacing: , with as the wavelength;
- Monte Carlo number: 2000;
- Assumed antenna pattern distortion:
4. Proposed Calibration Method
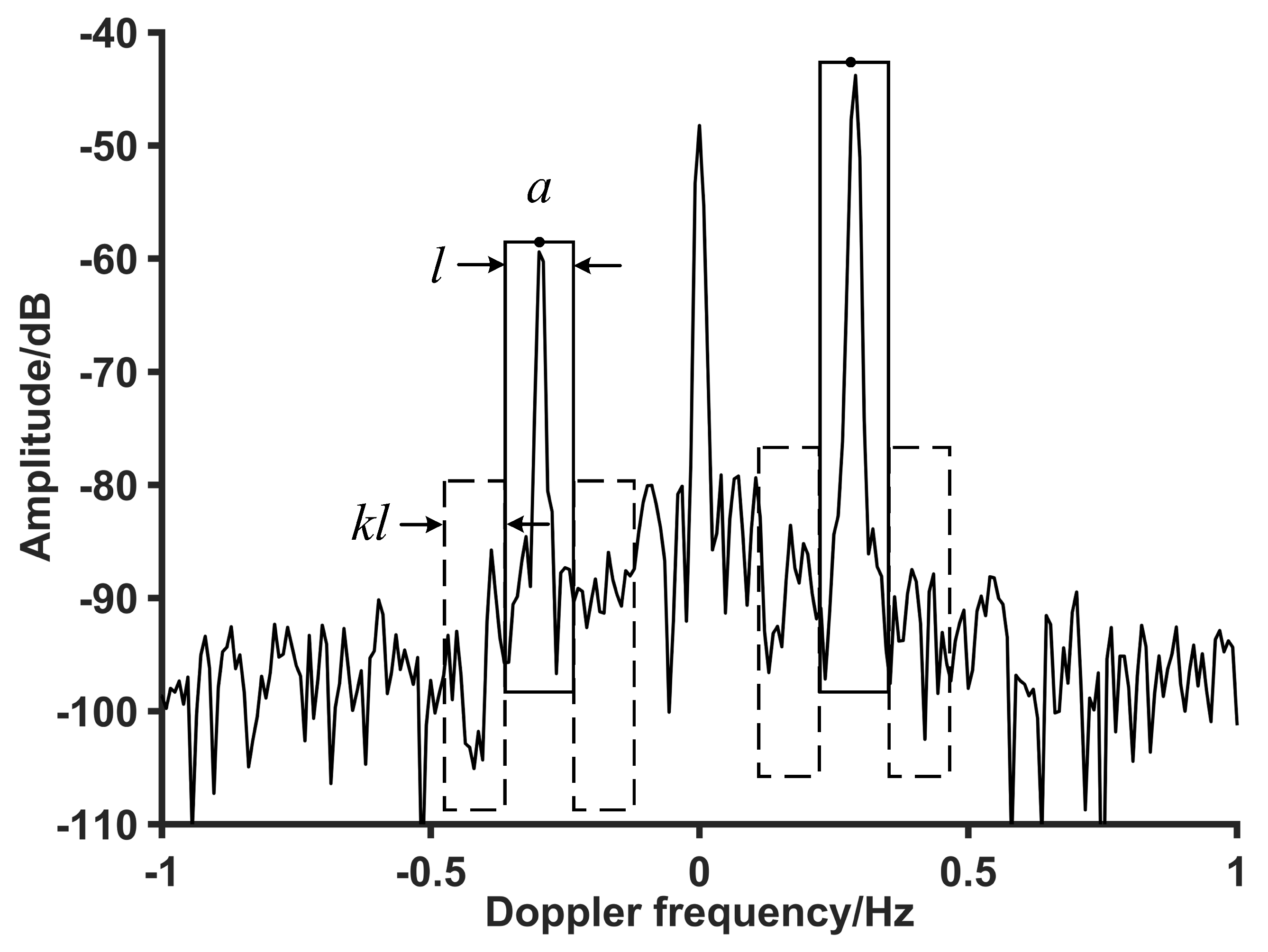
4.1. Extraction of the First-Order Sea Clutter Spectrum
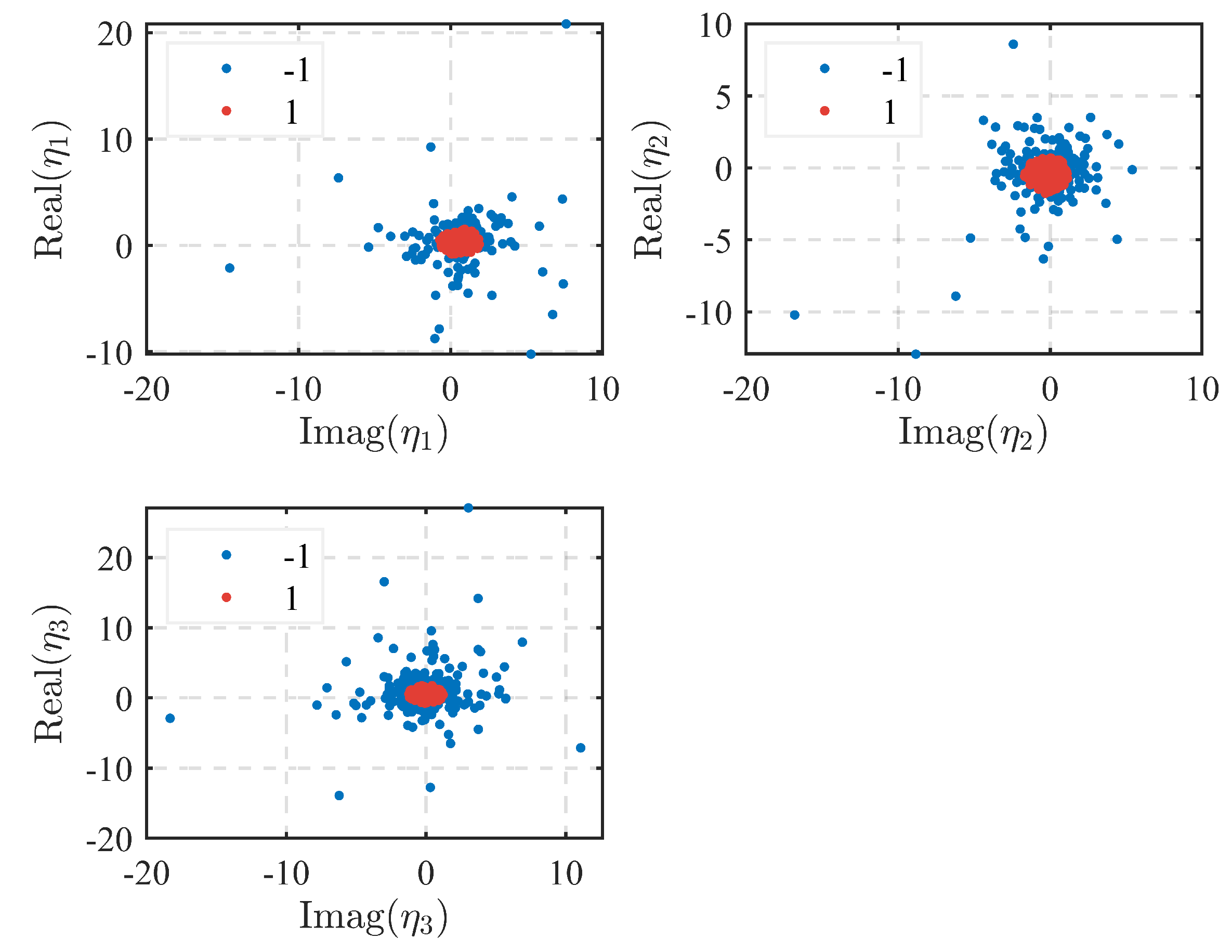
4.2. Extraction of the Single-DOA Spectrum Point
- and denote the gain- and phase-distortion constants, respectively, of the m-th channel;
- r and v represent the range and Doppler coordinates of the RD spectrum, respectively;
- , with as the wavelength of the radar signal.
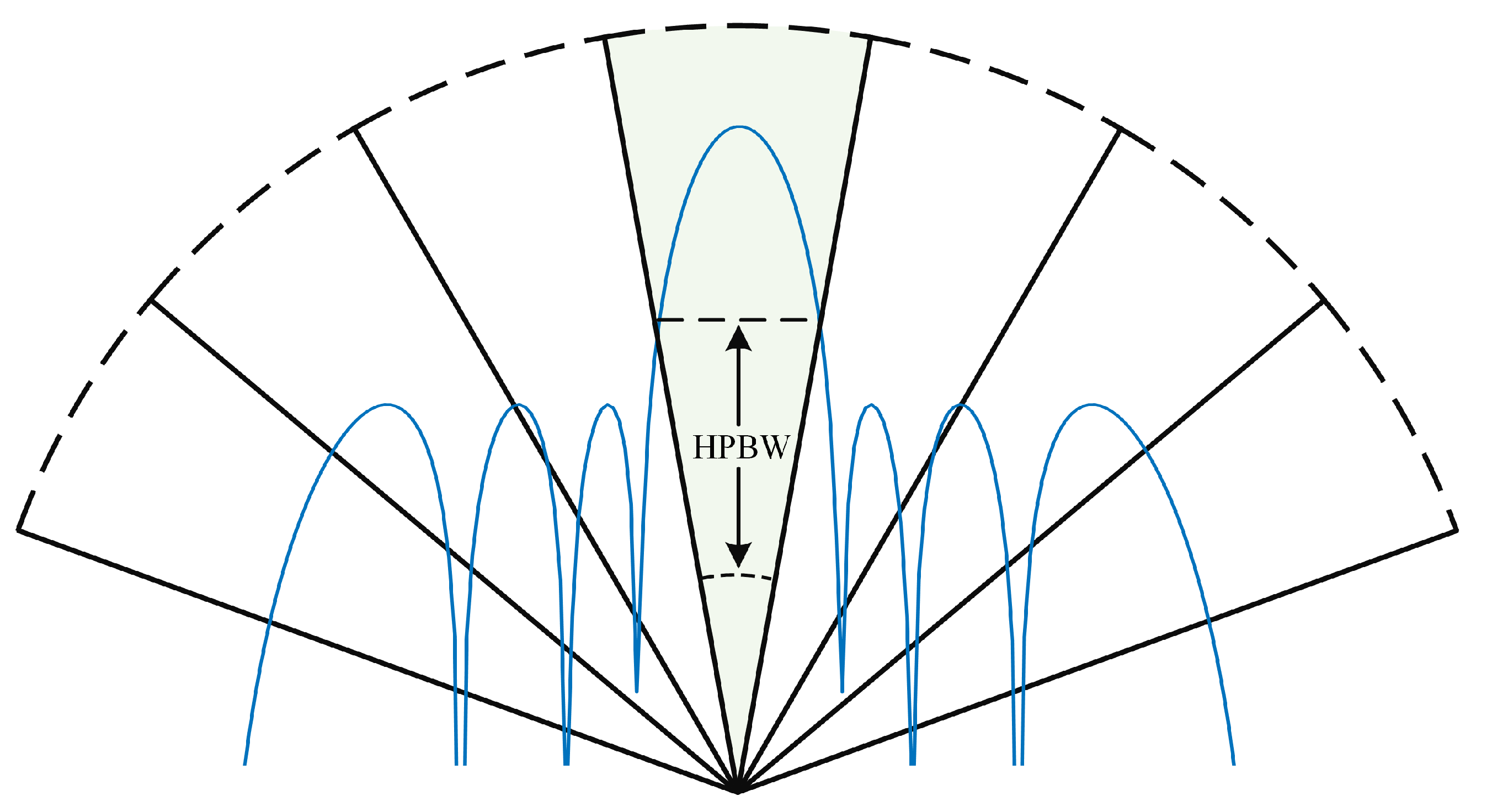
4.3. Iterative Estimation of the Antenna Pattern Distortion
- denotes the Chebyshev coefficient vector;
- and represent the start and end angles of the s-th sector, respectively;
- , where B denotes the number of beams and is generally equal to the number of antennas, i.e., .
5. Numerical and Experimental Results
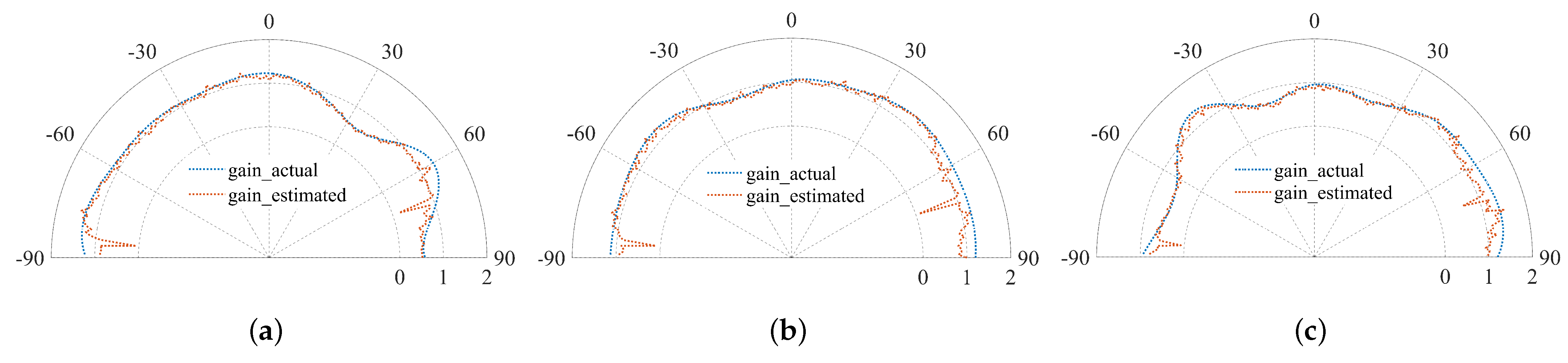
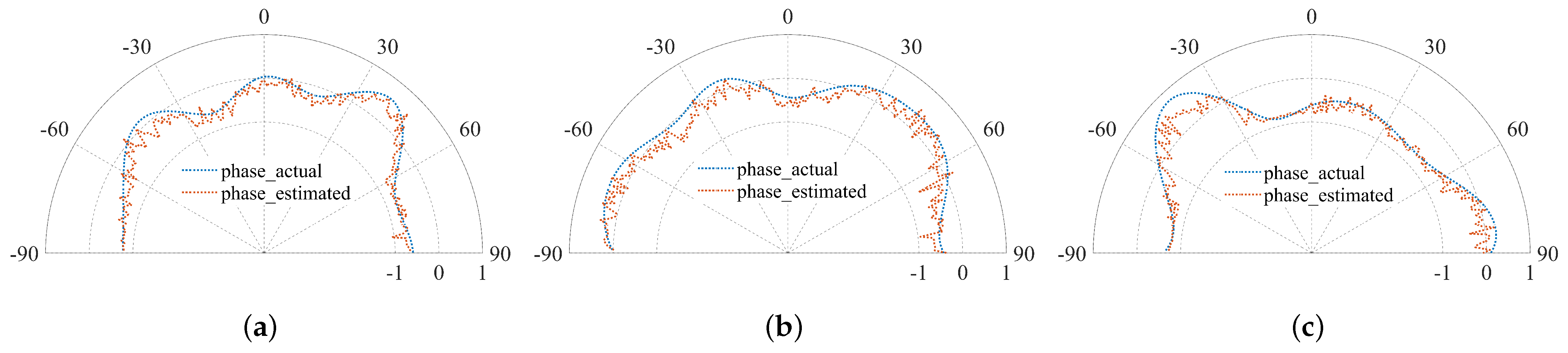
5.1. Numerical Results
- Radar operating frequency: MHz;
- Airspace range: relative to the normal direction of the array;
- The array configuration is the same as in Figure 3;
- Number of dipole antennas: , for simplicity;
- Antenna spacing: m;
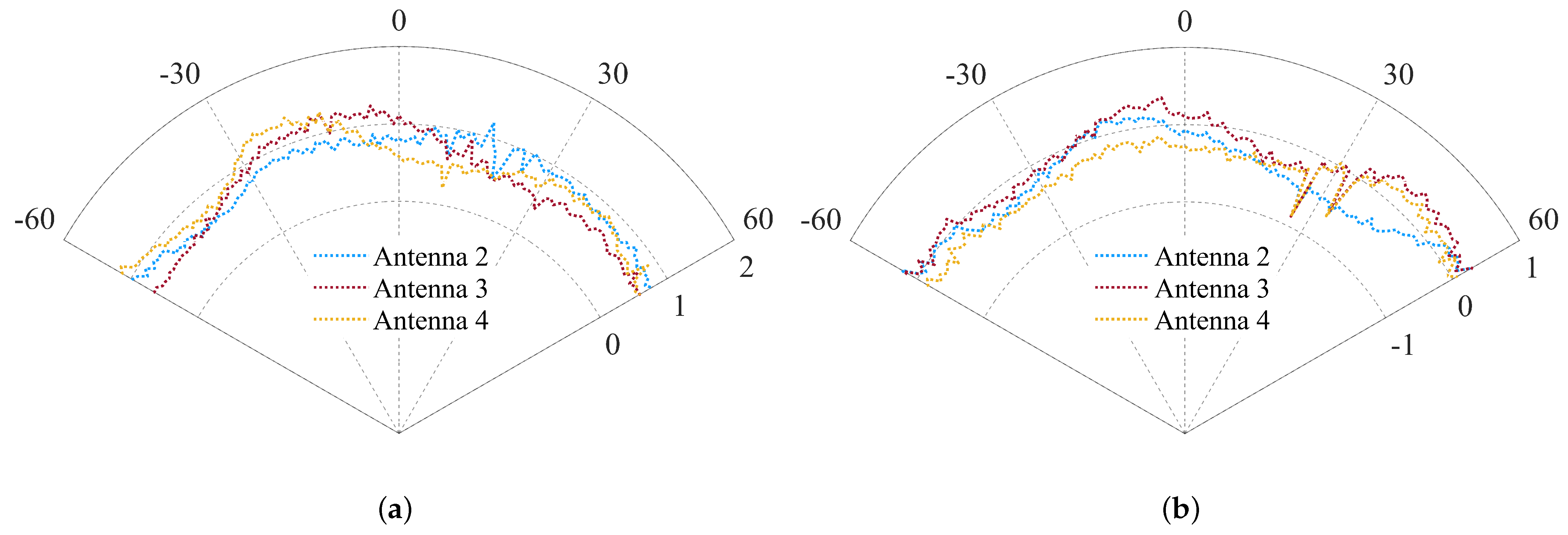
- APDs of different antennas (Figure 5) are generated according to the following criteria:
- *
- Set the first antenna as the reference antenna;
- *
- Divide the range of interest into nine sectors, with each APD controlled by the midpoints of these sectors;
- *
- Each midpoint contains gain and phase distortion, with the gain distortion and phase distortion obeying a uniform distribution in the range of and (radians), respectively;
- *
- Each APD curve is obtained by these midpoints through cubic spline interpolation.
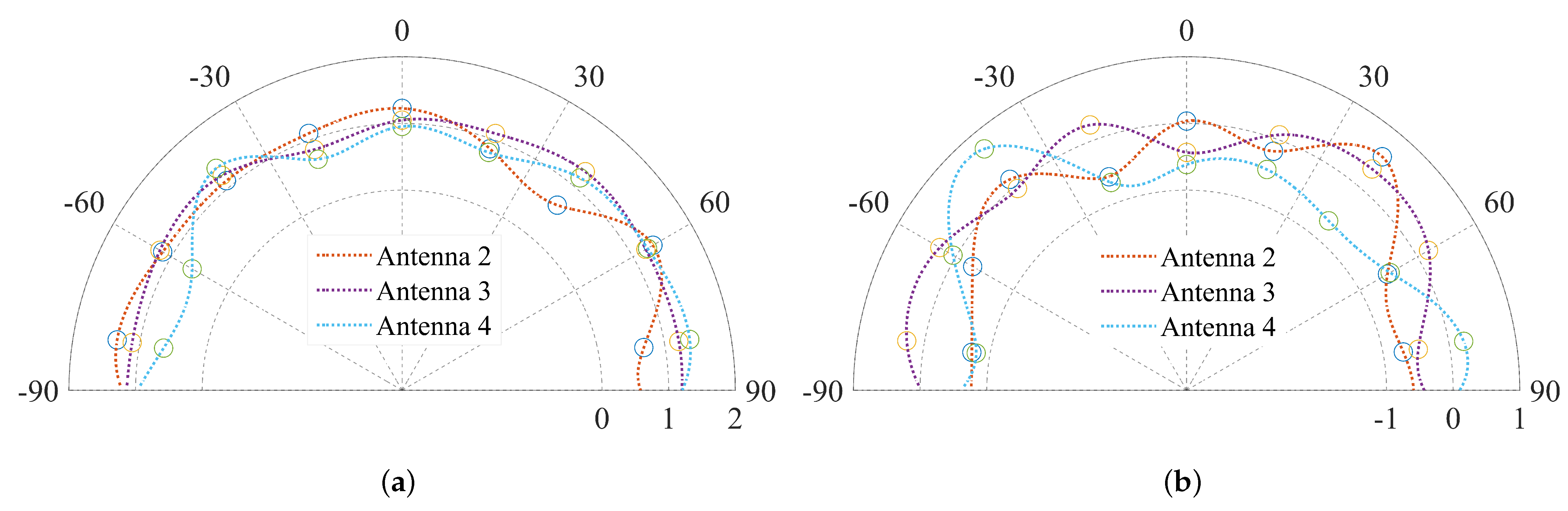
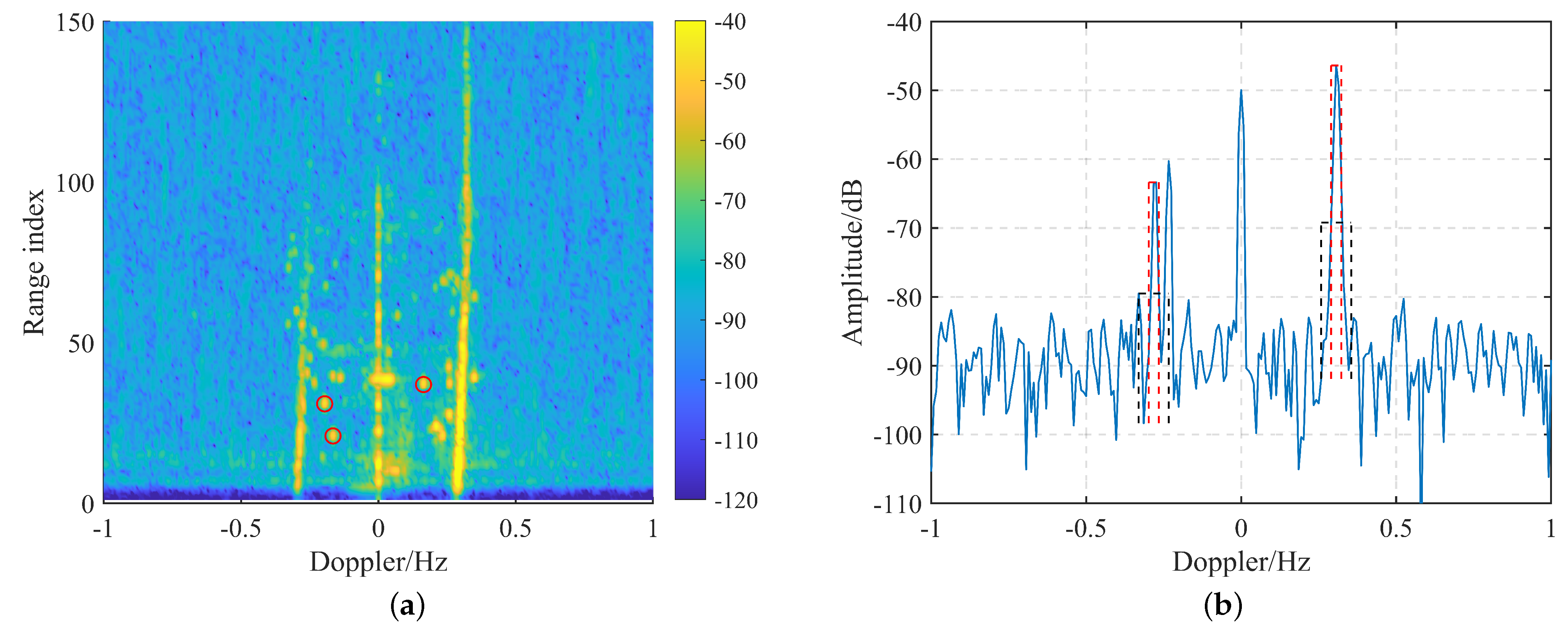
5.2. Experimental Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Anderson, S.J. Optimizing HF Radar Siting for surveillance and remote sensing in the strait of Malacca. IEEE Trans. Geosci. Remote Sens. 2012, 51, 1805–1816. [Google Scholar] [CrossRef]
- Lai, Y.; Zhou, H.; Wen, B. Surface current characteristics in the Taiwan Strait observed by high-frequency radars. IEEE J. Ocean. Eng. 2016, 42, 449–457. [Google Scholar] [CrossRef]
- Huang, W.; Gill, E.; Wu, X.; Li, L. Measurement of sea surface wind direction using bistatic high-frequency radar. IEEE Trans. Geosci. Remote Sens. 2012, 50, 4117–4122. [Google Scholar] [CrossRef]
- Maresca, S.; Braca, P.; Horstmann, J.; Grasso, R. Maritime surveillance using multiple high-frequency surface-wave radars. IEEE Trans. Geosci. Remote Sens. 2013, 52, 5056–5071. [Google Scholar] [CrossRef]
- Krim, H.; Viberg, M. Two decades of array signal processing research: The parametric approach. IEEE Signal Process. Mag. 1996, 13, 67–94. [Google Scholar] [CrossRef]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Schmid, C.M.; Schuster, S.; Feger, R.; Stelzer, A. On the effects of calibration errors and mutual coupling on the beam pattern of an antenna array. IEEE Trans. Antennas Propag. 2013, 61, 4063–4072. [Google Scholar] [CrossRef]
- de Paolo, T.; Terrill, E. Skill assessment of resolving ocean surface current structure using compact-antenna-style HF radar and the MUSIC direction-finding algorithm. J. Atmos. Ocean. Technol. 2007, 24, 1277–1300. [Google Scholar] [CrossRef]
- Tian, Y.; Wen, B.; Tan, J.; Li, Z. Study on pattern distortion and DOA estimation performance of crossed-loop/monopole antenna in HF radar. IEEE Trans. Antennas Propag. 2017, 65, 6095–6106. [Google Scholar] [CrossRef]
- Liu, A.; Liao, G.; Zeng, C.; Yang, Z.; Xu, Q. An eigenstructure method for estimating DOA and sensor gain-phase errors. IEEE Trans. Signal Process. 2011, 59, 5944–5956. [Google Scholar] [CrossRef]
- Huo, L.; Liao, G.; Yang, Z.; Zhang, Q. An efficient calibration algorithm for large aperture array position errors in a GEO SAR. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1362–1366. [Google Scholar] [CrossRef]
- Hui, H. Compensating for the mutual coupling effect in direction finding based on a new calculation method for mutual impedance. IEEE Antennas Wirel. Propag. Lett. 2003, 2, 26–29. [Google Scholar] [CrossRef]
- Barrick, D.; Lipa, B. Correcting for distorted antenna patterns in CODAR ocean surface measurements. IEEE J. Ocean. Eng. 1986, 11, 304–309. [Google Scholar] [CrossRef]
- Chen, W.; Lie, J.P.; Ng, B.P.; Wang, T.; Er, M.H. Joint gain/phase and mutual coupling array calibration technique with single calibrating source. Int. J. Antennas Propag. 2012, 2012, 625165. [Google Scholar] [CrossRef]
- Zhang, X.; Liao, G.; Yang, Z.; Zou, X.; Chen, Y. Effective mutual coupling estimation and calibration for conformal arrays based on pattern perturbation. IET Microwaves Antennas Propag. 2020, 14, 1998–2006. [Google Scholar] [CrossRef]
- Dai, Z.; Su, W.; Gu, H.; Li, W. Sensor gain-phase errors estimation using disjoint sources in unknown directions. IEEE Sens. J. 2016, 16, 3724–3730. [Google Scholar] [CrossRef]
- Li, W.; Lin, J.; Zhang, Y.; Chen, Z. Joint calibration algorithm for gain-phase and mutual coupling errors in uniform linear array. Chin. J. Aeronaut. 2016, 29, 1065–1073. [Google Scholar] [CrossRef]
- Teague, C.C.; Vesecky, J.F.; Hallock, Z.R. A comparison of multifrequency HF radar and ADCP measurements of near-surface currents during COPE-3. IEEE J. Ocean. Eng. 2001, 26, 399–405. [Google Scholar] [CrossRef]
- Kohut, J.T.; Glenn, S.M. Improving HF radar surface current measurements with measured antenna beam patterns. J. Atmos. Ocean. Technol. 2003, 20, 1303–1316. [Google Scholar] [CrossRef]
- Paduan, J.D.; Kim, K.C.; Cook, M.S.; Chavez, F.P. Calibration and validation of direction-finding high-frequency radar ocean surface current observations. IEEE J. Ocean. Eng. 2006, 31, 862–875. [Google Scholar] [CrossRef]
- Washburn, L.; Romero, E.; Johnson, C.; Emery, B.; Gotschalk, C. Measurement of antenna patterns for oceanographic radars using aerial drones. J. Atmos. Ocean. Technol. 2017, 34, 971–981. [Google Scholar] [CrossRef]
- Whelan, C.; Emery, B.; Teague, C.; Barrick, D.; Washburn, L.; Harlan, J. Automatic calibrations for improved quality assurance of coastal HF radar currents. In Proceedings of the 2012 Oceans, Hampton Roads, VA, USA, 14–19 October 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 1–4. [Google Scholar]
- Emery, B.M.; Washburn, L.; Whelan, C.; Barrick, D.; Harlan, J. Measuring antenna patterns for ocean surface current HF radars with ships of opportunity. J. Atmos. Ocean. Technol. 2014, 31, 1564–1582. [Google Scholar] [CrossRef]
- Zhao, C.; Chen, Z.; Li, J.; Ding, F.; Huang, W.; Fan, L. Validation and evaluation of a ship echo-based array phase manifold calibration method for HF surface wave radar DOA estimation and current measurement. Remote Sens. 2020, 12, 2761. [Google Scholar] [CrossRef]
- Zhou, H.; Wen, B. Automatic antenna pattern estimation for high-frequency surface wave radars. J. Electromagn. Waves Appl. 2013, 27, 168–179. [Google Scholar] [CrossRef]
- Zhou, H.; Wen, B. Calibration of antenna pattern and phase errors of a cross-loop/monopole antenna array in high-frequency surface wave radars. IET Radar Sonar Navig. 2014, 8, 407–414. [Google Scholar] [CrossRef]
- Lai, Y.; Zhou, H.; Zeng, Y.; Wen, B. Quantifying and reducing the DOA estimation error resulting from antenna pattern deviation for direction-finding HF radar. Remote Sens. 2017, 9, 1285. [Google Scholar] [CrossRef]
- Lu, B.; Wen, B.; Tian, Y.; Wang, R. Analysis and calibration of crossed-loop antenna for vessel DOA estimation in HF radar. IEEE Antennas Wirel. Propag. Lett. 2017, 17, 42–45. [Google Scholar] [CrossRef]
- Stoica, P.; Nehorai, A. MUSIC, maximum likelihood, and Cramer-Rao bound. IEEE Trans. Acoust. Speech, Signal Process. 1989, 37, 720–741. [Google Scholar] [CrossRef]
- Friedlander, B.; Weiss, A.J. The resolution threshold of a direction-finding algorithm for diversely polarized arrays. IEEE Trans. Signal Process. 1994, 42, 1719–1727. [Google Scholar] [CrossRef]
- Barrick, D. First-order theory and analysis of MF/HF/VHF scatter from the sea. IEEE Trans. Antennas Propag. 1972, 20, 2–10. [Google Scholar] [CrossRef]
- Xiongbin, W.; Feng, C.; Zijie, Y.; Hengyu, K. Broad beam HFSWR array calibration using sea echoes. In Proceedings of the 2006 CIE International Conference on Radar, Shanghai, China, 16–19 October 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 1–3. [Google Scholar]
- Zhao, W.; Wang, L.; Mirjalili, S. Artificial hummingbird algorithm: A new bio-inspired optimizer with its engineering applications. Comput. Methods Appl. Mech. Eng. 2022, 388, 114194. [Google Scholar] [CrossRef]
- Laws, K.E.; Fernandez, D.M.; Paduan, J.D. Simulation-based evaluations of HF radar ocean current algorithms. IEEE J. Ocean. Eng. 2000, 25, 481–491. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Liu, A.; Yang, Q.; Yu, C.; Lyv, Z. Antenna Pattern Calibration Method for Phased Array of High-Frequency Surface Wave Radar Based on First-Order Sea Clutter. Remote Sens. 2023, 15, 5789. https://doi.org/10.3390/rs15245789
Li H, Liu A, Yang Q, Yu C, Lyv Z. Antenna Pattern Calibration Method for Phased Array of High-Frequency Surface Wave Radar Based on First-Order Sea Clutter. Remote Sensing. 2023; 15(24):5789. https://doi.org/10.3390/rs15245789
Chicago/Turabian StyleLi, Hongbo, Aijun Liu, Qiang Yang, Changjun Yu, and Zhe Lyv. 2023. "Antenna Pattern Calibration Method for Phased Array of High-Frequency Surface Wave Radar Based on First-Order Sea Clutter" Remote Sensing 15, no. 24: 5789. https://doi.org/10.3390/rs15245789
APA StyleLi, H., Liu, A., Yang, Q., Yu, C., & Lyv, Z. (2023). Antenna Pattern Calibration Method for Phased Array of High-Frequency Surface Wave Radar Based on First-Order Sea Clutter. Remote Sensing, 15(24), 5789. https://doi.org/10.3390/rs15245789