


Coherent Multi-Dwell Processing of Un-Synchronized Dwells for High Velocity Estimation and Super-Resolution in Radar



Abstract
:1. Introduction
2. Theoretical Background
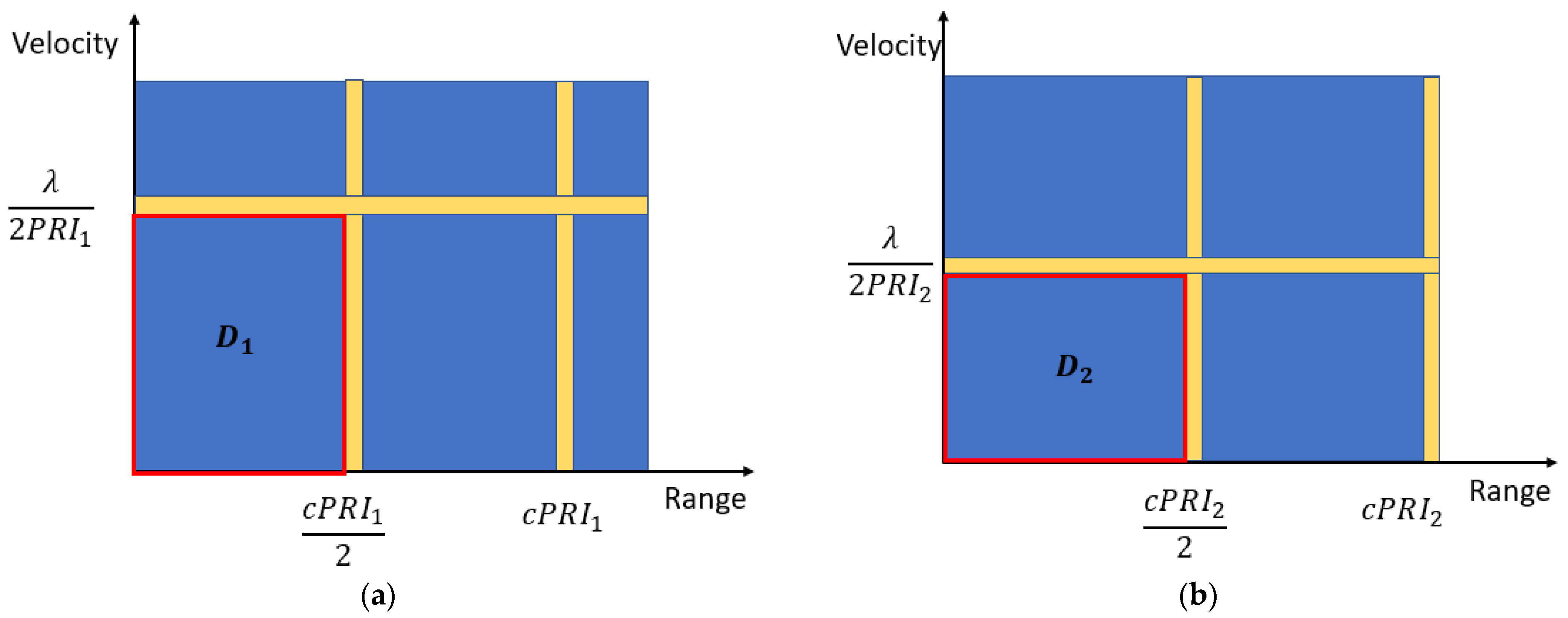
2.1. Multi-PRI in Classical Radar Processing
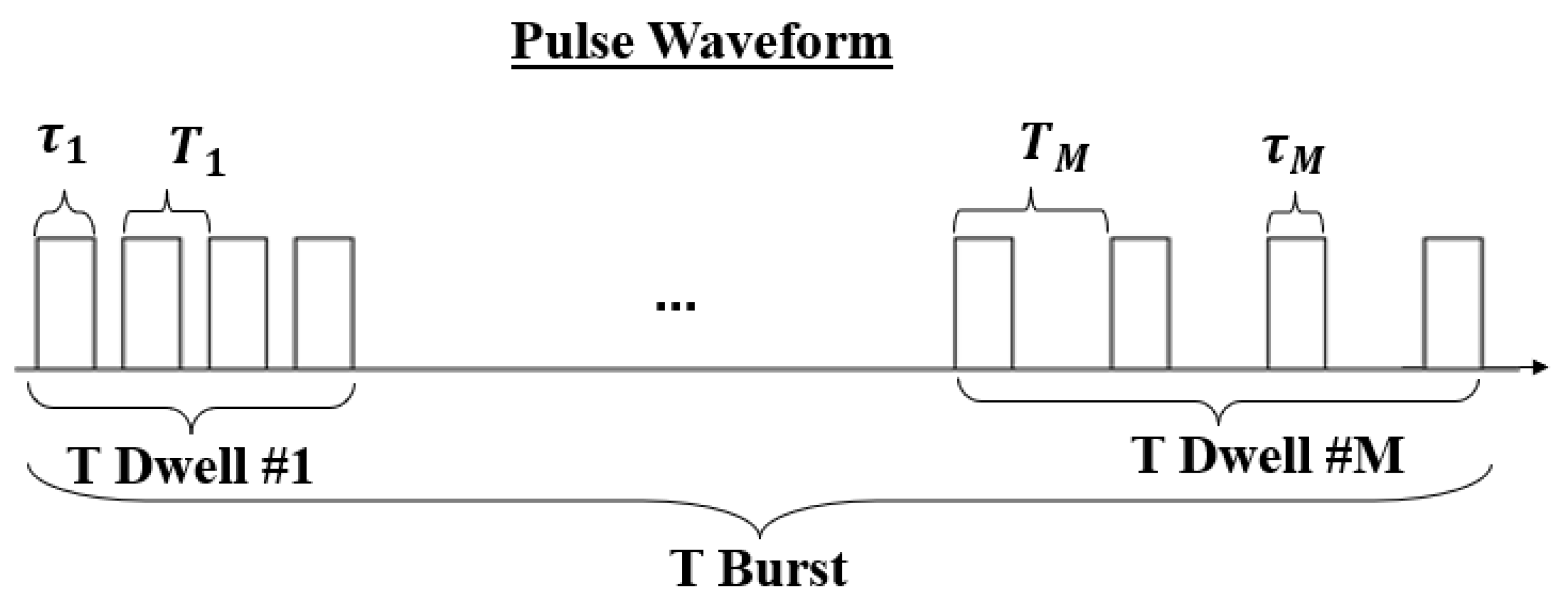
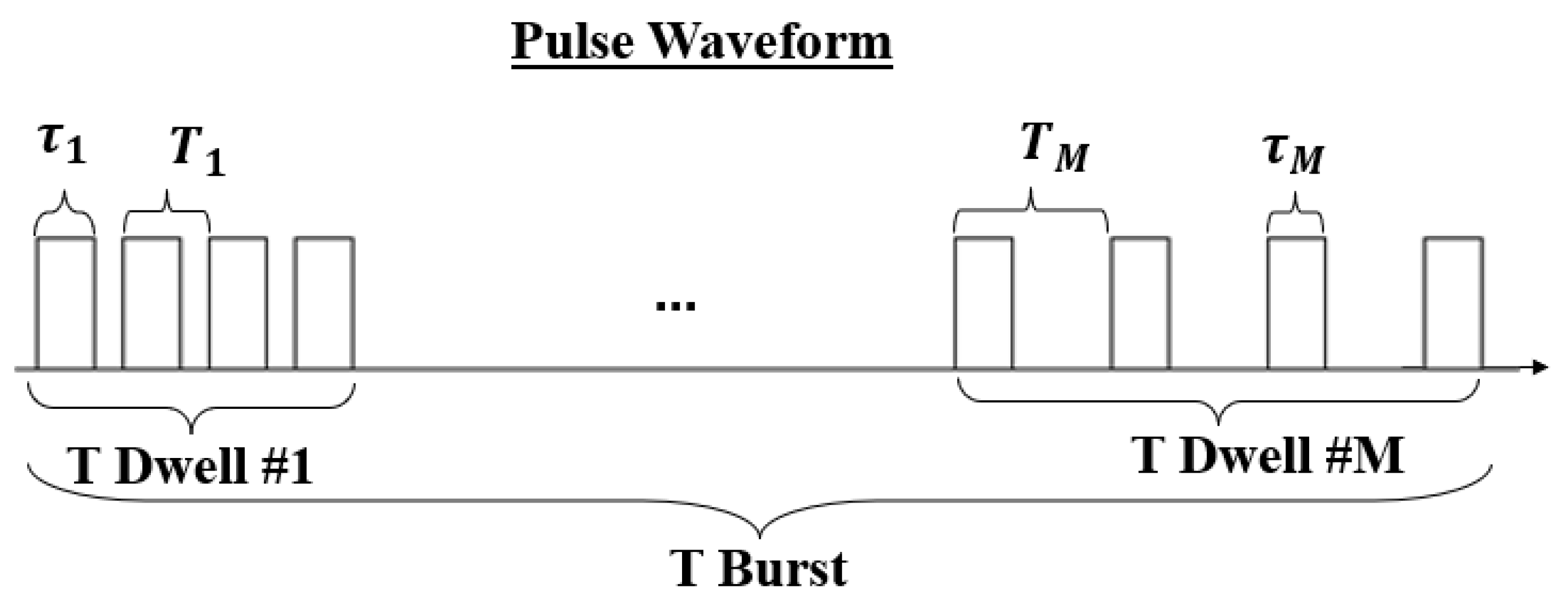
2.2. Theoretical Formulation
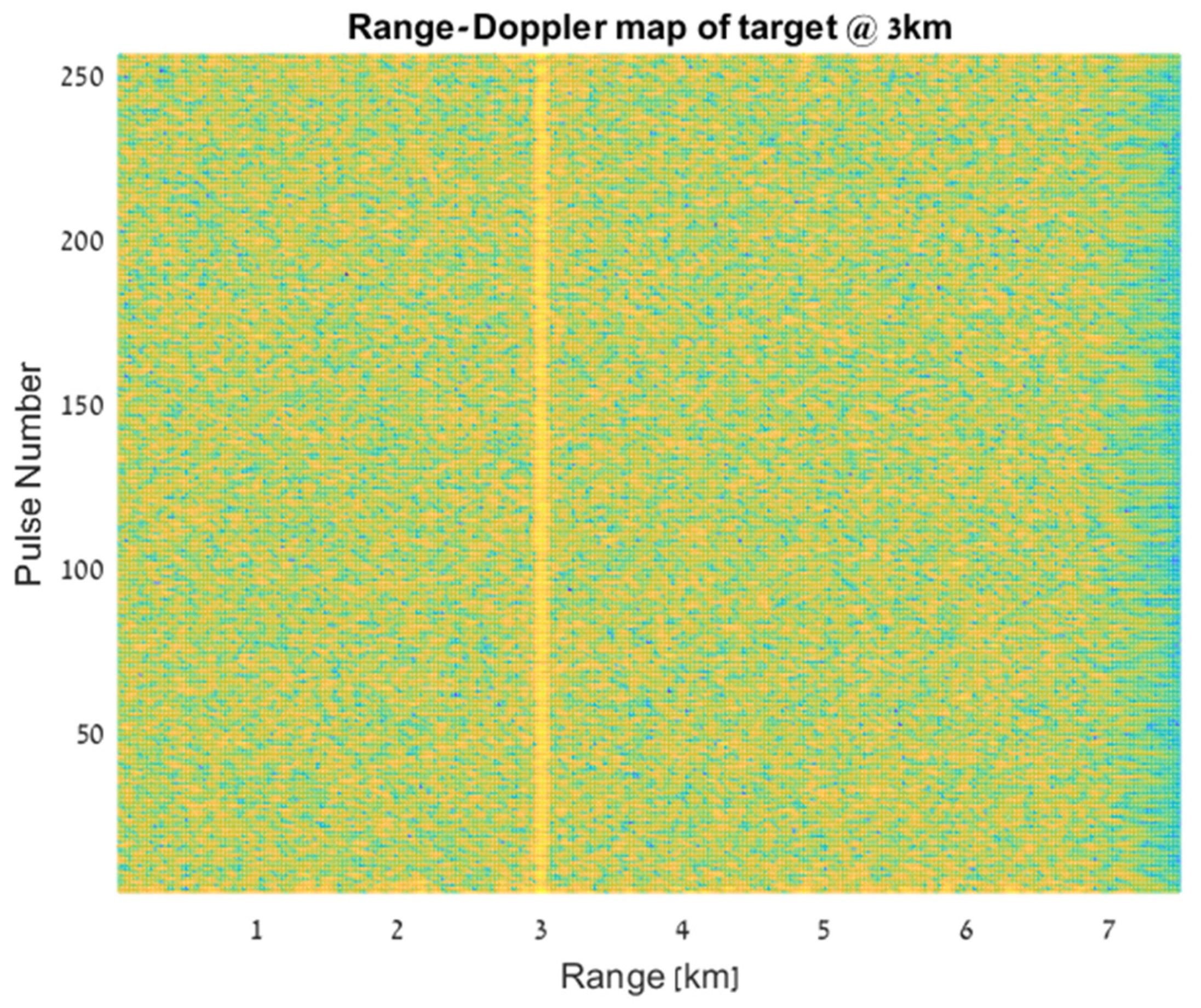
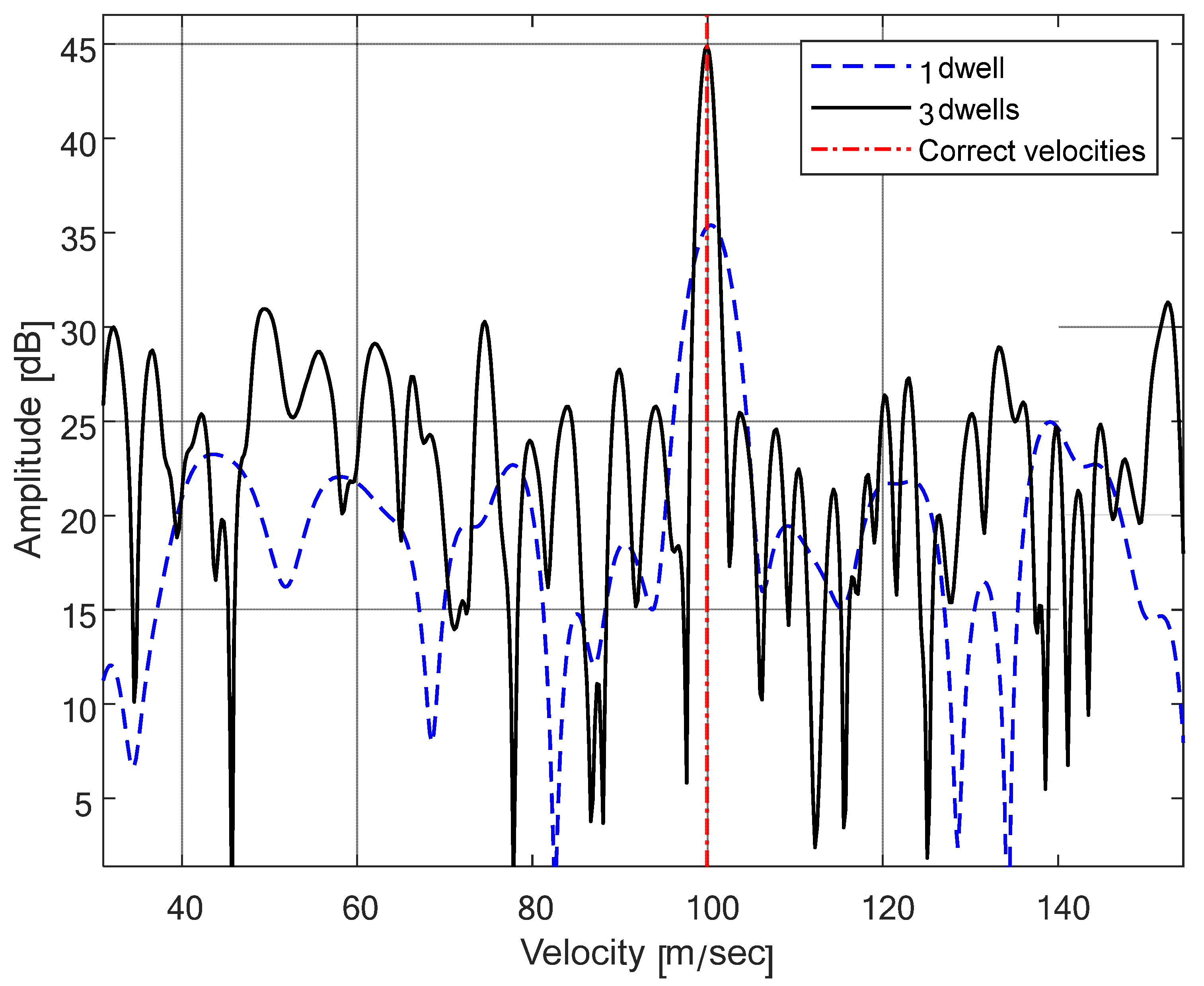
3. CMDP for Single Target Estimation
3.1. CMDP Model
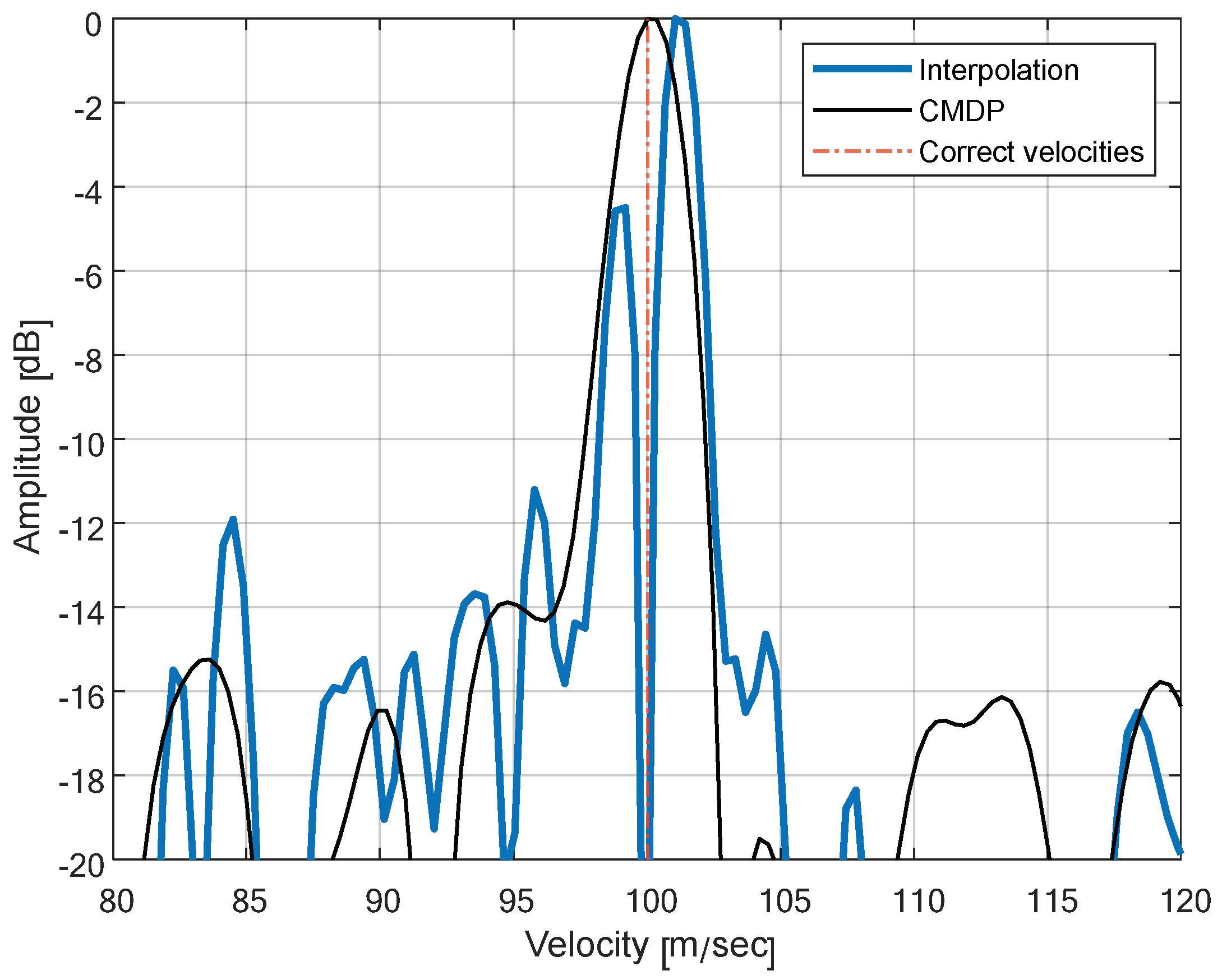
3.2. CMDP vs. Interpolation for Un-synchronized Dwells
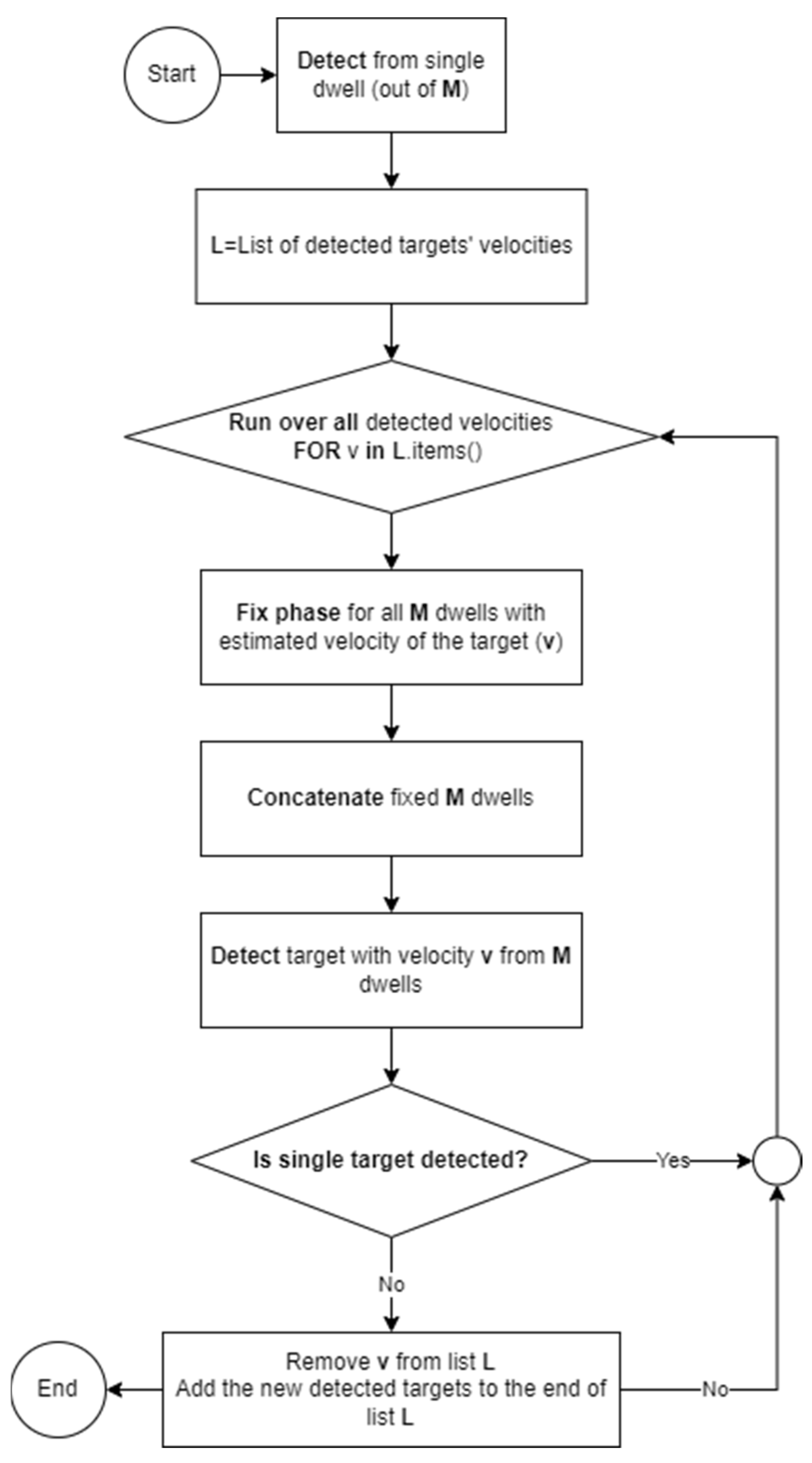
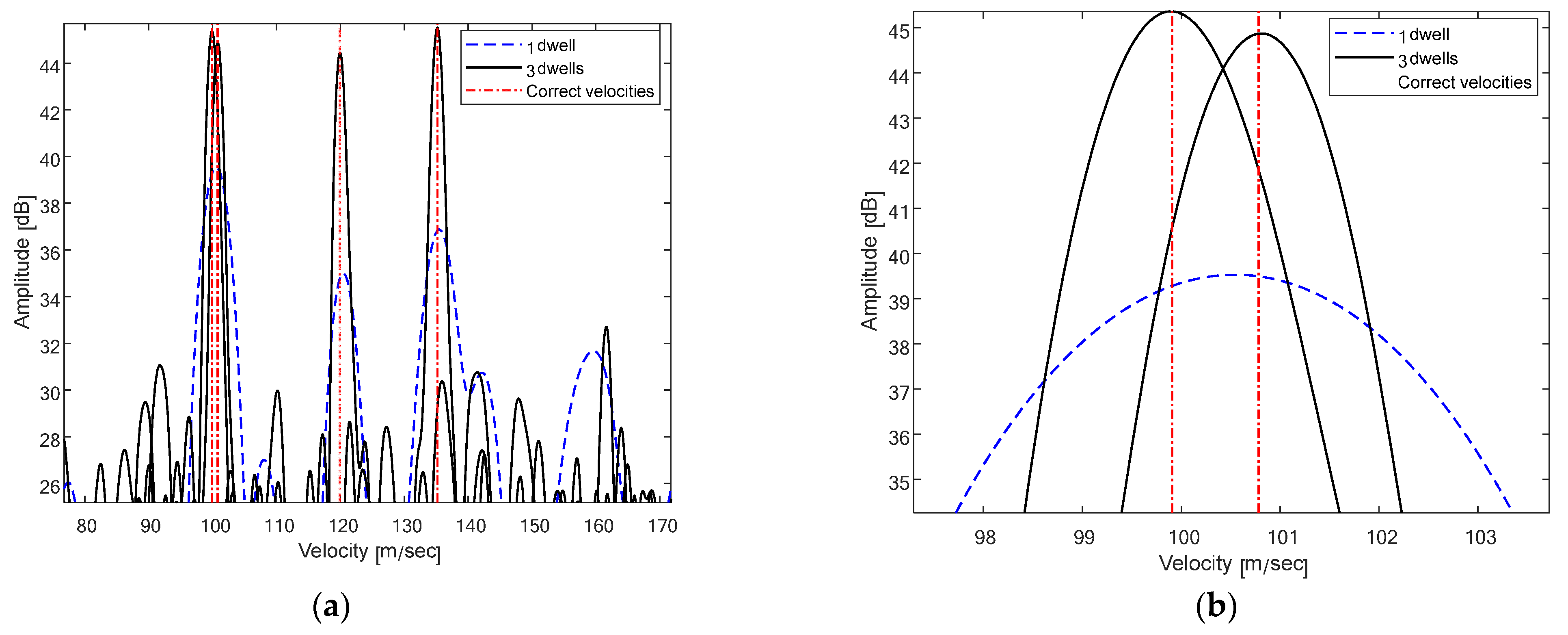
4. CMDP Algorithm for Multiple Target Estimation and Resolution
CMDP Algorithms
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Brookner, E. Developments and breakthroughs in radars and phased-arrays. In Proceedings of the 2016 IEEE Radar Conference (RadarConf), Philadelphia, PA, USA, 2–6 May 2016; pp. 1–6. [Google Scholar]
- Bocon, R.J.; McGree, T.; Renfro, J. Phased array performance characteristics and compliance with SATCOM military standards. In Proceedings of the MILCOM 2005–2005 IEEE Military Communications Conference, Atlantic City, NJ, USA, 17–20 October 2005; pp. 1712–1718. [Google Scholar]
- Skolnik, M. Radar Handbook, Edition 2; McGraw-Hill: New York, NY, USA, 2008. [Google Scholar]
- Scheer, J.; Holm, W.A. Principles of Modern Radar; SciTech Pub: Raleigh, NC, USA, 2010. [Google Scholar]
- Porat, B. Digital Processing of Random Signals: Theory and Methods; Dover Publications: Mineola, NY, USA, 2008. [Google Scholar]
- Sarkar, T.K.; Koh, J. Coherent Processing Across Multiple Staggered Pulse Repetition Interval (PRI) Dwells in Radar; Syracuse Univ NY Office Of Sponsored Programs: New York, NY, USA, 2004. [Google Scholar]
- Setsu, M.; Hayashi, T.; He, J.; Kidera, S. Super-Resolution Doppler Velocity Estimation by Kernel-Based Range–$\tau $ Point Conversions for UWB Short-Range Radars. IEEE Trans. Geosci. Remote Sens. 2019, 58, 2430–2443. [Google Scholar] [CrossRef]
- Liu, Z.; Quan, Y.; Wu, Y.; Xing, M. Super-Resolution Range and Velocity Estimations for SFA-OFDM Radar. Remote Sens. 2022, 14, 278. [Google Scholar] [CrossRef]
- Kim, B.S.; Jin, Y.; Lee, J.; Kim, S. High-Efficiency Super-Resolution FMCW Radar Algorithm Based on FFT Estimation. Sensors 2021, 21, 4018. [Google Scholar] [CrossRef]
- Zheng, L.; Wang, X. Super-resolution delay-Doppler estimation for OFDM passive radar. IEEE Trans. Signal Process. 2017, 65, 2197–2210. [Google Scholar] [CrossRef] [Green Version]
- Schweizer, B.; Knill, C.; Schindler, D.; Waldschmidt, C. Stepped-carrier OFDM-radar processing scheme to retrieve high-resolution range-velocity profile at low sampling rate. IEEE Trans. Microw. Theory Tech. 2017, 66, 1610–1618. [Google Scholar] [CrossRef] [Green Version]
- Cohen, D.; Eldar, Y.C. Reduced time-on-target in pulse Doppler radar: Slow time domain compressed sensing. In Proceedings of the 2016 IEEE Radar Conference (RadarConf), Philadelphia, PA, USA, 2–6 May 2016; pp. 1–4. [Google Scholar]
- Zhu, J.; Zhao, T.; Huang, T.; Zhang, D. Analysis of random pulse repetition interval radar. In Proceedings of the 2016 IEEE Radar Conference (RadarConf), Philadelphia, PA, USA, 2–6 May 2016; pp. 1–5. [Google Scholar]
- Alabaster, C.M.; Hughes, E.J.; Matthew, J.H. Medium PRF radar PRF selection using evolutionary algorithms. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 990–1001. [Google Scholar] [CrossRef]
- Wiley, D.; Parry, S.; Alabaster, C.; Hughes, E. Performance comparison of PRF schedules for medium PRF radar. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 601–611. [Google Scholar] [CrossRef]
- Levanon, N. Radar Principles; John Wiley & Sons: New York, NY, USA, 1988. [Google Scholar]
- Buzzi, S.; Lops, M.; Venturino, L. Track-before-detect procedures for early detection of moving target from airborne radars. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 937–954. [Google Scholar] [CrossRef]
- Yu, J.; Xu, J.; Peng, Y.N.; Xia, X.G. Radon-Fourier transform for radar target detection (III): Optimality and fast implementations. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 991–1004. [Google Scholar] [CrossRef]
- Cohen, D.; Cohen, D.; Eldar, Y.C. High resolution FDMA MIMO radar. IEEE Trans. Aerosp. Electron. Syst. 2019, 56, 2806–2822. [Google Scholar] [CrossRef]
- Wehner, D.R. High Resolution Rada; Norwood: Chicago, IL, USA, 1987. [Google Scholar]
- Barton, D.K.; Ward, H.R. Handbook of Radar Measurement; Artech House: Washington, DC, USA, 1984. [Google Scholar]
- Harman, S. A comparison of staring radars with scanning radars for UAV detection: Introducing the Alarm™ staring radar. In Proceedings of the 2015 European Radar Conference (EuRAD), Paris, France, 9–11 September 2015; pp. 185–188. [Google Scholar]
- Richards, M.A. The keystone transformation for correcting range migration in range-doppler processing. Pulse 2014, 1000, 1. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Denotation | Symbol | Units |
|---|---|---|
| Carrier frequency | GHz | |
| Speed of light | m/s | |
| Wavelength | m | |
| Number of dwells | - | |
| Amplitude of the doppler signal from dwell m | - | |
| Number of pulses in dwell | - | |
| Pulse repetition interval of dwell | s | |
| Pulse duration in dwell | s | |
| Duty cycle of dwell | - | |
| Time on target of dwell | s | |
| Burst duration | s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Levy, B.; Maman, L.; Shvartzman, S.; Pinhasi, Y. Coherent Multi-Dwell Processing of Un-Synchronized Dwells for High Velocity Estimation and Super-Resolution in Radar. Remote Sens. 2023, 15, 782. https://doi.org/10.3390/rs15030782
Levy B, Maman L, Shvartzman S, Pinhasi Y. Coherent Multi-Dwell Processing of Un-Synchronized Dwells for High Velocity Estimation and Super-Resolution in Radar. Remote Sensing. 2023; 15(3):782. https://doi.org/10.3390/rs15030782
Chicago/Turabian StyleLevy, Benzion, Lior Maman, Shlomi Shvartzman, and Yosef Pinhasi. 2023. "Coherent Multi-Dwell Processing of Un-Synchronized Dwells for High Velocity Estimation and Super-Resolution in Radar" Remote Sensing 15, no. 3: 782. https://doi.org/10.3390/rs15030782
APA StyleLevy, B., Maman, L., Shvartzman, S., & Pinhasi, Y. (2023). Coherent Multi-Dwell Processing of Un-Synchronized Dwells for High Velocity Estimation and Super-Resolution in Radar. Remote Sensing, 15(3), 782. https://doi.org/10.3390/rs15030782