
Model Construction and System Design of Natural Grassland-Type Recognition Based on Deep Learning

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
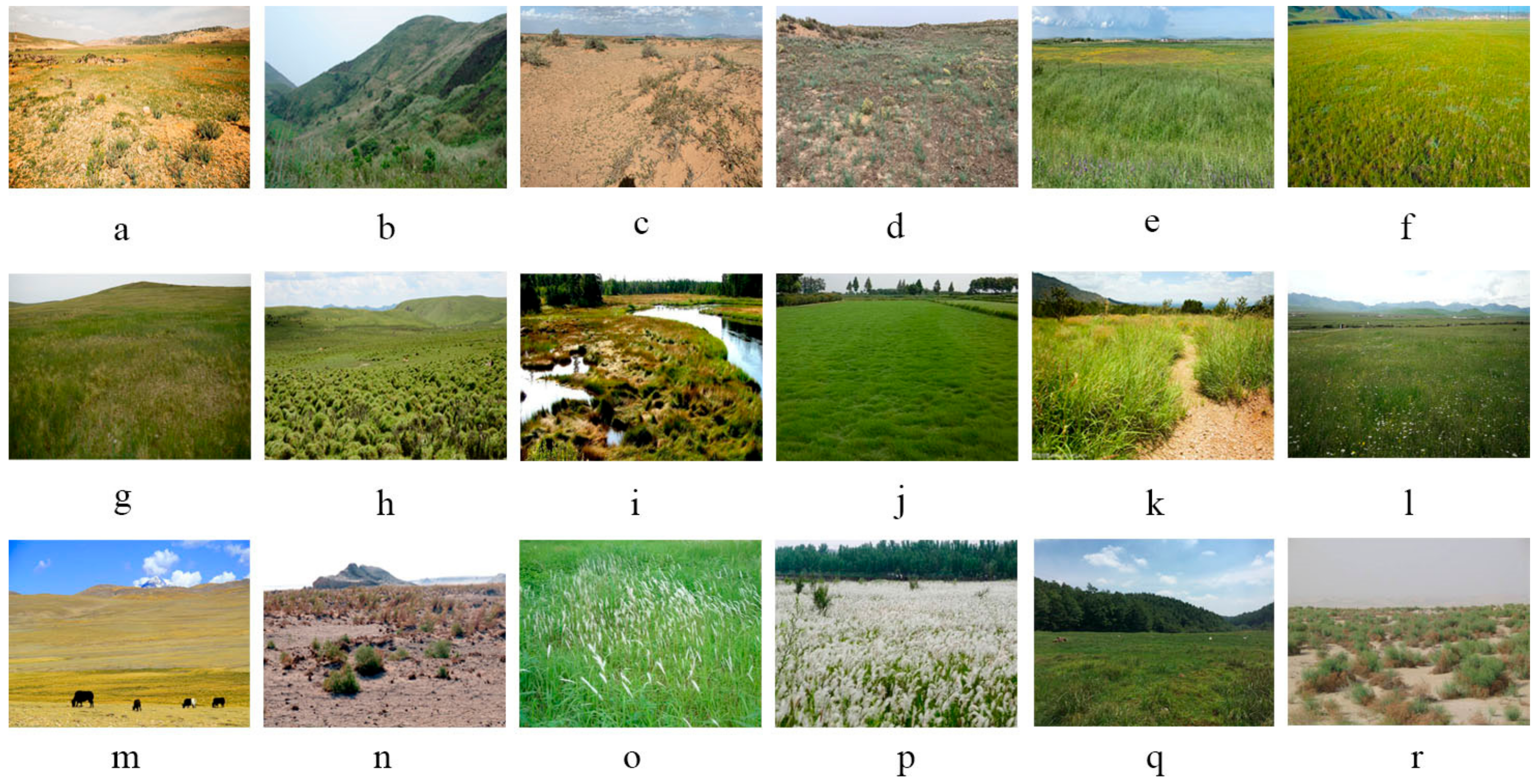
2.1. Principles of Grassland Classification
2.2. Grassland Image Data Acquisition and Preprocessing
2.2.1. Data Acquisition
2.2.2. Data Cleaning and Segmentation
2.2.3. Data Augmentation
2.3. Reference Grassland Types
2.3.1. Chinese Grassland Resource-Type Map
2.3.2. Classification of Grassland Based on Meteorological Data
2.4. Construction and Evaluation of Grassland-Type Recognition Model
2.4.1. Deep Learning Framework
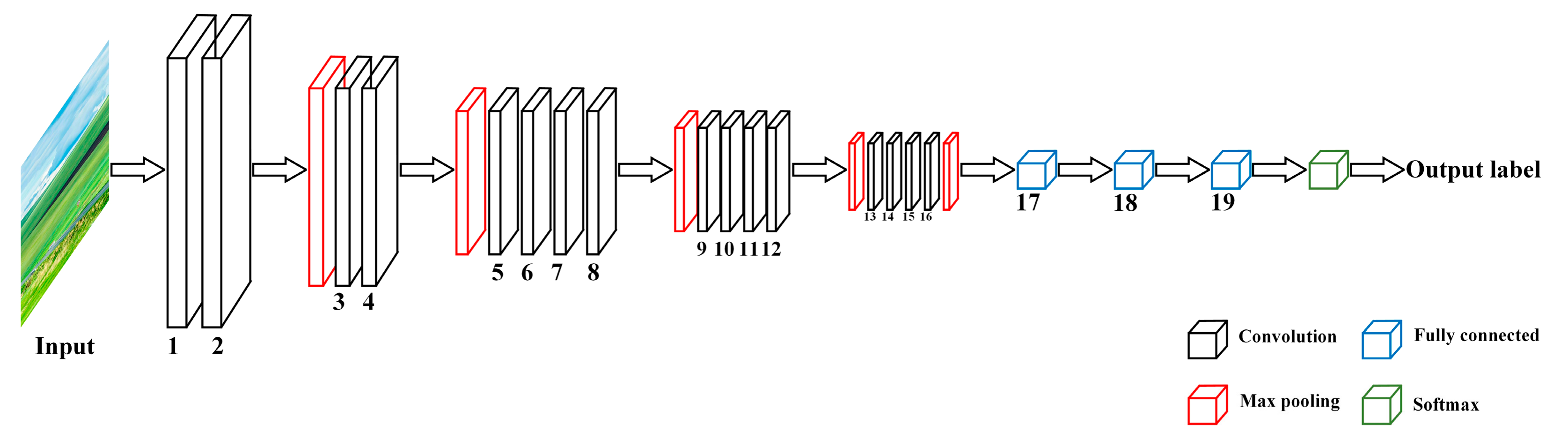
2.4.2. VGG-19 Pretrained Model and Transfer Learning
2.4.3. Setting of Main Training Parameters
2.4.4. Model Preservation
2.4.5. Accuracy Evaluation
2.5. Design of Grassland-Type Recognition System
2.5.1. Design of System Architecture
2.5.2. Design of System Functions
2.6. Technical Route
3. Results and Analysis
3.1. Model Construction and Accuracy Evaluation
3.2. Recognition Accuracy of Optimal Model
3.3. Analysis of Factors Influencing Model Performance
3.3.1. Impact of Learning Rate on Model Performance
3.3.2. Impact of Data Augmentation on Model Performance
3.4. Recognition Accuracy of Each Grassland Type
3.5. Implementation of the System
3.5.1. Implementation of System Functions
3.5.2. Comparison of Prediction Results between the Model’s TOP1 and Two Reference Grassland Types
3.5.3. Evaluation of System Stability
4. Discussion
4.1. Shortcomings and Prospects of Grassland-Type Recognition Model
4.2. Advantages and Disadvantages of the Grassland-Type Recognition System
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Piao, S.; Fang, J.; Ciais, P.; Peylin, P.; Huang, Y.; Sitch, S.; Wang, T. The carbon balance of terrestrial ecosystems in China. Nature 2009, 458, 1009–1013. [Google Scholar] [CrossRef] [PubMed]
- Hou, M.; Ge, J.; Xiu, Y.; Meng, B.; Liu, J.; Feng, Q.; Liang, T. The urgent need to develop a new grassland map in China: Based on the consistency and accuracy of ten land cover products. Sci. China Life Sci. 2022, 66, 385–405. [Google Scholar] [CrossRef] [PubMed]
- O’Mara, F.P. The role of grasslands in food security and climate change. Ann. Bot. 2012, 110, 1263–1270. [Google Scholar] [CrossRef]
- Zheng, X.; Zhang, J.; Cao, S. Net value of grassland ecosystem services in mainland China. Land Use Policy 2018, 79, 94–101. [Google Scholar] [CrossRef]
- Akiyama, T.; Kawamura, K. Grassland degradation in China: Methods of monitoring, management and restoration. Grassl. Sci. 2007, 53, 1–17. [Google Scholar] [CrossRef]
- Zhou, W.; Yang, H.; Huang, L.; Chen, C.; Lin, X.; Hu, Z.; Li, J. Grassland degradation remote sensing monitoring and driving factors quantitative assessment in China from 1982 to 2010. Ecol. Indic. 2017, 83, 303–313. [Google Scholar] [CrossRef]
- Kang, L.; Han, X.; Zhang, Z.; Sun, O. Grassland ecosystems in China: Review of current knowledge and research advancement. Philos. Trans. R. Soc. B Biol. Sci. 2007, 362, 997–1008. [Google Scholar] [CrossRef]
- Yan, L.; Zhou, G.; Zhang, F. Effects of different grazing intensities on grassland production in China: A meta-analysis. PLoS ONE 2013, 8, e81466. [Google Scholar] [CrossRef]
- Cai, H.; Yang, X.; Xu, X. Human-induced grassland degradation/restoration in the central Tibetan Plateau: The effects of ecological protection and restoration projects. Ecol. Eng. 2015, 83, 112–119. [Google Scholar] [CrossRef]
- Zhang, Q.; Buyantuev, A.; Fang, X.; Han, P.; Li, A.; Li, F.Y.; Liang, C.; Liu, Q.; Ma, Q.; Niu, J.; et al. Ecology and sustainability of the Inner Mongolian Grassland: Looking back and moving forward. Landsc. Ecol. 2020, 35, 2413–2432. [Google Scholar] [CrossRef]
- Xu, D.; Chen, B.; Shen, B.; Wang, X.; Yan, Y.; Xu, L.; Xin, X. The classification of grassland types based on object-based image analysis with multisource data. Rangel. Ecol. Manag. 2019, 72, 318–326. [Google Scholar] [CrossRef]
- Guo, F.; Fan, J.; Bian, J.; Liu, F.; Zhang, H. Grassland types identification based on time-series MODIS NDVI data in northern Tibet. Remote Sens. Technol. Appl. 2011, 26, 821–826. [Google Scholar] [CrossRef]
- Sun, M.; Shen, W.; Xie, M.; Li, H.; Gao, F. The identification of grassland types in the source region of the Yarlung Zangbo River based on spectral features. Remote Sens. Nat. Resour. 2012, 24, 83–89. [Google Scholar] [CrossRef]
- Alem, A.; Kumar, S. Deep Learning Models Performance Evaluations for Remote Sensed Image Classification. IEEE Access 2022, 10, 111784–111793. [Google Scholar] [CrossRef]
- Cheng, G.; Xie, X.; Han, J.; Guo, L.; Xia, G.-S. Remote sensing image scene classification meets deep learning: Challenges, methods, benchmarks, and opportunities. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 3735–3756. [Google Scholar] [CrossRef]
- Sheehan, S.; Song, Y.S. Deep learning for population genetic inference. PLoS Comput. Biol. 2016, 12, e1004845. [Google Scholar] [CrossRef]
- Sun, Y.; Liu, Y.; Wang, G.; Zhang, H. Deep learning for plant identification in natural environment. Comput. Intell. Neurosci. 2017, 2017, 7361042. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; Wang, J.; Tian, Y.; Dai, S. Deep learning for image-based large-flowered chrysanthemum cultivar recognition. Plant Methods 2019, 15, 146. [Google Scholar] [CrossRef]
- Li, J.; Sun, S.; Jiang, H.; Tian, Y.; Xu, X. Image recognition and empirical application of desert plant species based on convolutional neural network. J. Arid. Land 2022, 14, 1440–1455. [Google Scholar] [CrossRef]
- Mu, Y.; Feng, R.; Ni, R.; Li, J.; Luo, T.; Liu, T.; Li, X.; Gong, H.; Guo, Y.; Sun, Y.; et al. A Faster R-CNN-Based Model for the Identification of Weed Seedling. Agronomy 2022, 12, 2867. [Google Scholar] [CrossRef]
- Lin, H.L.; Feng, Q.S.; Liang, T.G.; Ren, J.Z. Modelling global-scale potential grassland changes in spatio-temporal patterns to global climate change. Int. J. Sustain. Dev. World Ecol. 2013, 20, 83–96. [Google Scholar] [CrossRef]
- Lin, H.; Zhang, Y. Evaluation of six methods to predict grassland net primary productivity along an altitudinal gradient in the Alxa Rangeland, Western Inner Mongolia, China. Grassl. Sci. 2013, 59, 100–110. [Google Scholar] [CrossRef]
- Jin, Y.; Yang, X.; Qiu, J.; Li, J.; Gao, T.; Wu, Q.; Zhao, F.; Ma, H.; Yu, H.; Xu, B. Remote sensing-based biomass estimation and its spatio-temporal variations in temperate grassland, Northern China. Remote Sens. 2014, 6, 1496–1513. [Google Scholar] [CrossRef]
- DAHV (Department of Animal Husbandry and Veterinary, the Ministry of Agriculture of the People’s Republic of China); NAHVS (National Animal Husbandry and Veterinary Service, the Ministry of Agriculture of the People’s Republic of China). Rangeland Resources of China; China Science and Technology Press: Beijing, China, 1996; pp. 147–339. [Google Scholar]
- Shen, J.-J.; Chang, C.-C.; Li, Y.-C. Combined association rules for dealing with missing values. J. Inf. Sci. 2007, 33, 468–480. [Google Scholar] [CrossRef]
- Shorten, C.; Khoshgoftaar, T.M. A survey on image data augmentation for deep learning. J. Big Data 2019, 6, 60. [Google Scholar] [CrossRef]
- Su, D. The compilation and study of the grassland resource map of China on the scale of 1:1,000,000. J. Nat. Resour. 1996, 11, 75–83. [Google Scholar] [CrossRef]
- Ren, J.Z.; Hu, Z.Z.; Zhao, J.; Zhang, D.G.; Hou, F.J.; Lin, H.L.; Mu, X.D. A grassland classification system and its application in China. Rangel. J. 2008, 30, 199–209. [Google Scholar] [CrossRef]
- Laporte, F.; Dambre, J.; Bienstman, P. Highly parallel simulation and optimization of photonic circuits in time and frequency domain based on the deep-learning framework PyTorch. Sci. Rep. 2019, 9, 5918. [Google Scholar] [CrossRef]
- Ketkar, N.; Moolayil, J. Introduction to pytorch. In Deep Learning with Python; Apress: Berkeley, CA, USA, 2021; pp. 27–91. [Google Scholar]
- Paszke, A.; Gross, S.; Massa, F.; Lerer, A.; Bradbury, J.; Chanan, G.; Killeen, T.; Lin, Z.; Gimelshein, N.; Antiga, L.; et al. Pytorch: An imperative style, high-performance deep learning library. Adv. Neural Inf. Process. Syst. 2019, 32, 8026–8037. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar] [CrossRef]
- Lee, H.; Grosse, R.; Ranganath, R.; Ng, A.Y. Convolutional deep belief networks for scalable unsupervised learning of hierarchical representations. In Proceedings of the 26th Annual International Conference on Machine Learning, Montreal, QC, Canada, 14–18 June 2009; pp. 609–616. [Google Scholar] [CrossRef]
- Han, B.; Du, J.; Jia, Y.; Zhu, H. Zero-Watermarking Algorithm for Medical Image Based on VGG19 Deep Convolution Neural Network. J. Health Eng. 2021, 2021, 5551520. [Google Scholar] [CrossRef] [PubMed]
- Pan, S.J.; Yang, Q. A survey on transfer learning. IEEE Transactions on knowledge and data engineering. IEEE Trans. Knowl. Data Eng. 2010, 22, 1345–1359. [Google Scholar] [CrossRef]
- Jiang, W.; Peng, J.; Geyan, Y. Research on adaptive learning rate algorithm in deep learning. J. Huazhong Univ. Sci. Technol. (Nat. Sci. Ed.) 2019, 47, 79–83. [Google Scholar] [CrossRef]
- Petrovska, B.; Atanasova-Pacemska, T.; Corizzo, R.; Mignone, P.; Lameski, P.; Zdravevski, E. Aerial scene classification through fine-tuning with adaptive learning rates and label smoothing. Appl. Sci. 2020, 10, 5792. [Google Scholar] [CrossRef]
- Khan, A.; Sohail, A.; Zahoora, U.; Qureshi, A.S. A survey of the recent architectures of deep convolutional neural networks. Artif. Intell. Rev. 2020, 53, 5455–5516. [Google Scholar] [CrossRef]
- Li, M.; Zhou, Z.-H. Improve computer-aided diagnosis with machine learning techniques using undiagnosed samples. IEEE Trans. Syst. Man, Cybern.-Part A Syst. Humans 2007, 37, 1088–1098. [Google Scholar] [CrossRef]
- Foster, E.C.; Godbole, S. Overview of MySQL. In Database Systems; Apress: Berkeley, CA, USA, 2016; pp. 451–460. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef]
- Tian, L.; Fan, C.; Ming, Y.; Jin, Y. Stacked PCA network (SPCANet): An effective deep learning for face recognition. In Proceedings of the 2015 IEEE International Conference on Digital Signal Processing (DSP), Singapore, 21–24 July 2015; pp. 1039–1043. [Google Scholar] [CrossRef]
- Omer, R.; Fu, L. An automatic image recognition system for winter road surface condition classification. In Proceedings of the 13th International IEEE Conference on Intelligent Transportation Systems, Funchal, Portugal, 19–22 September 2010; pp. 1375–1379. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Steppe Type | Average Temperature of the Hottest Month/°C | >0 °C Annual Cumulative Temperature/°C | Ivanov Wetness Index |
|---|---|---|---|
| Temperate meadow steppe | 10–22 | 1500–3900 | 0.60–1.00 |
| Temperate steppe | 10–22 | 1500–3900 | 0.30–0.60 |
| Temperate desert steppe | 10–22 | 1500–3900 | 0.20–0.30 |
| Temperate steppe desert | 10–22 | 1500–3900 | 0.13–0.20 |
| Temperate desert | 10–22 | 1500–3900 | 0–0.13 |
| Mountain meadow | 10–22 | 1500–3900 | >1.00 |
| Alpine meadow steppe | 6–10 | 0–1500 | 0.60–1.00 |
| Alpine steppe | 6–10 | 0–1500 | 0.30–0.60 |
| Alpine meadow | 6–10 | 0–1500 | >1.00 |
| Alpine desert | 6–10 | 0–1500 | 0–0.13 |
| Alpine desert steppe | 6–10 | 0–1500 | 0.20–0.30 |
| Warm tussock | 22–26 | 3900–4800 | >1.00 |
| Warm shrub tussock | 22–26 | 3900–4800 | >1.00 |
| Tropical tussock | 26–28 | >4800 | >1.00 |
| Tropical shrub tussock | 26–28 | >4800 | >1.00 |
| Savanna | 26–28 | >4800 | >1.00 |
| Wetland | — | — | — |
| Lowland meadow | — | — | — |
| Field | Field Meaning | Field Type | Field Properties |
|---|---|---|---|
| Id | Number | INT | Primary key, NOT FULL |
| Longitude | Longitude of grid center point | FLOAT | NOT FULL |
| Latitude | Latitude of grid center point | FLOAT | NOT FULL |
| Hottest_temp | Average temperature of the hottest month | FLOAT | NOT FULL |
| Accumulated_temp | >0 °C annual cumulative temperature | FLOAT | NOT FULL |
| Wetness | Ivanov wetness index | FLOAT | NOT FULL |
| Precipitation | Annual precipitation | FLOAT | NOT FULL |
| Average_temp | Annual average temperature | FLOAT | NOT FULL |
| Humidity | Annual relative humidity | FLOAT | NOT FULL |
| Class_1 | Reference grassland type 1 | VARCHAR2 | / |
| Class_2 | Reference grassland type 2 | VARCHAR2 | NOT FULL |
| Image_loca | Storage path of image explanations | VARCHAR2 | NOT FULL |
| Description | Text explanations | VARCHAR2 | NOT FULL |
| Model | Whether or Not Data Augmentation Is Used | Learning Rate | TOP1 Accuracy % | TOP5 Accuracy % |
|---|---|---|---|---|
| 1 | No | 0.1 | 16.06 | 29.08 |
| 2 | Yes | 19.13 | 32.12 | |
| 3 | No | 0.05 | 66.73 | 79.53 |
| 4 | Yes | 71.61 | 84.84 | |
| 5 | No | 0.01 | 73.45 | 85.73 |
| 6 | Yes | 78.32 | 91.27 | |
| 7 | No | 0.005 | 53.46 | 66.62 |
| 8 | Yes | 57.68 | 71.06 | |
| 9 | No | 0.001 | 24.92 | 37.90 |
| 10 | Yes | 28.75 | 41.73 |
| Number | Whether the Model’s TOP1 Prediction Result Is the Same as the True Category | Whether the Reference Grassland Type 1 Is the Same as the True Category | Whether the Reference Grassland Type 2 Is the Same as the True Category | Percentage/% |
|---|---|---|---|---|
| 1 | Yes | Yes | Yes | 42.81 |
| 2 | Yes | No | Yes | 15.94 |
| 3 | Yes | Yes | No | 14.38 |
| 4 | Yes | No | No | 5.31 |
| 5 | No | Yes | Yes | 11.88 |
| 6 | No | No | Yes | 4.38 |
| 7 | No | Yes | No | 3.75 |
| 8 | No | No | No | 1.56 |
| Operation Step | CPU Utilization/% | Memory Usage/% |
|---|---|---|
| Start | 0 | 0.38 |
| Load the model | 0 | 0.38 |
| Select an image | 0 | 0.38 |
| Recognize | 8.60 | 14.70 |
| View explanations | 1.00 | 14.00 |
| View more information | 1.50 | 14.00 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiu, Y.; Ge, J.; Hou, M.; Feng, Q.; Liang, T.; Guo, R.; Chen, J.; Wang, Q. Model Construction and System Design of Natural Grassland-Type Recognition Based on Deep Learning. Remote Sens. 2023, 15, 1045. https://doi.org/10.3390/rs15041045
Xiu Y, Ge J, Hou M, Feng Q, Liang T, Guo R, Chen J, Wang Q. Model Construction and System Design of Natural Grassland-Type Recognition Based on Deep Learning. Remote Sensing. 2023; 15(4):1045. https://doi.org/10.3390/rs15041045
Chicago/Turabian StyleXiu, Yangjing, Jing Ge, Mengjing Hou, Qisheng Feng, Tiangang Liang, Rui Guo, Jigui Chen, and Qing Wang. 2023. "Model Construction and System Design of Natural Grassland-Type Recognition Based on Deep Learning" Remote Sensing 15, no. 4: 1045. https://doi.org/10.3390/rs15041045
APA StyleXiu, Y., Ge, J., Hou, M., Feng, Q., Liang, T., Guo, R., Chen, J., & Wang, Q. (2023). Model Construction and System Design of Natural Grassland-Type Recognition Based on Deep Learning. Remote Sensing, 15(4), 1045. https://doi.org/10.3390/rs15041045