1. Introduction
Inland waters are indispensable for agricultural, industrial, and recreational needs, such as aquaculture, transport, and energy production, and as a major source of drinking water and irrigation [
1]. The deterioration of water quality has become one of the most important topics of environmental protection and the safe use of water. More than 60% of world’s large lakes (>10 km
2) were considered eutrophic in the summer of 2012 [
2]. According to the study of OECD (World Economic Cooperation and Development Organization), 80% of water eutrophication is attributable to phosphorus, and 10% is directly related to phosphorus and nitrogen [
3]. In China, eutrophication of rivers and lakes has become more severe in the middle reaches of the Yangtze River, and phosphorus is the primary limiting element [
4,
5]. Therefore, monitoring the spatiotemporal variability of total phosphorus (TP) concentration is of great significance to protect the water environment.
Traditional water quality monitoring methods have great precision, mainly based on field sampling, laboratory analysis, or automated instruments [
6]. However, these methods are labor-intensive, time-consuming, and costly, and do not meet the needs of spatiotemporal dynamic monitoring of water quality [
1,
7,
8].
Over the last few decades, the role of remote sensing in water quality retrieval has been significantly increasing, with low-cost, full-coverage, and micro-dynamic characteristics thanks to the rapid growth in technologies and applications. For many years, satellites equipped with various sensors have been adopted for water quality assessment [
9,
10]. However, owing to the long return visit period, low spatial resolution, and susceptibility to interference by clouds, the application of satellites to real-time monitoring water quality of complex environments and small-sized waterbodies, such as small ditches and ponds, is not very suitable. Additionally, researchers have proved that small lakes were more vulnerable to eutrophication [
11], and chlorophyll-a (Chl-a) concentrations were inversely related to lake size in the middle and lower reaches of Yangtze River [
12].
Unmanned aerial vehicles (UAV) have led to innovative, regional monitoring of inland surface water and have successfully compensated for deficiencies in spatiotemporal resolution with flexibility and nonsusceptibility to interference by clouds [
6,
7]. UAVs equipped with multi-sensors, especially multispectral sensors, have been used to monitor Chl-a, total suspended solids (TSS), total nitrogen (TN), total phosphorus (TP), chemical oxygen demand (COD), and permanganate index (COD
Mn) in complex inland waterbodies [
6,
13]. For example, Su and Chou [
14] used multispectral sensor mounted on a UAV to map the trophic state of a small reservoir. Wang et al. [
15] designed an acquisition scheme of water quality spectral elements suitable for the complex waterbodies of aquaculture, combining the ground wireless sensor network and UAV spectral remote sensing technology. Liu et al. [
16] constructed the inversion models of TP, TSS, and turbidity by multispectral sensor mounted on a UAV, and achieved higher accuracy through feature selection.
Although remote sensing can facilitate the monitoring of TP concentration, the methodology involved is complicated because phosphorus is nonactive and does not have spectral characteristics [
17]. Therefore, the relationships between TP concentration and surface reflectance are nonlinear and complex [
18]. The bands from visible to near-infrared have been used to estimate TP concentration [
3,
19]. The traditional retrieval models of water quality parameters based on statistical regression analysis, including linear regression, polynomial regression, ridge regression, and other methods, have poor inversion accuracy and weak generalization [
20]. Machine learning (ML) methods are gaining momentum for water quality retrieval due to their ability to capture the potential relationship between remote sensing images and TP concentration [
21,
22]. In recent years, many researchers have proved that TP concentration can be estimated by ML methods with UAV multispectral images. For example, TP concentration in urban rivers was monitored by ML methods with UAV multispectral images [
6]. Zhang et al. [
23] developed a hybrid feedback deep factorization machine model to retrieve the concentration of phosphorus and trace pollution sources in urban rivers. Chang et al. [
24] directly explored the TP spatiotemporal patterns with the aid of genetic programming models. UAV multispectral data were used to retrieve Chl-a, TN, and TP based on six ML models [
25]. Based on the spectral and spatial features, Zhou et al. [
26] used an ensemble ML model to estimate TP concentration in Shanghai. Although previous studies have used ML methods for TP estimation in different regions, specific models are only used for specific regions, or even only for the condition range in training data. In addition, almost all ML methods have their limitations, such as complex model hyperparameters. The intelligent optimization algorithm (IOA) can optimize the hyperparameters of ML methods due to their global search and adaptive characteristics and improve the robustness and predictability [
27]. This paper establishes the TP retrieval models by combining the global search ability of IOA with the advantages of the high efficiency and flexibility of machine learning (IOA-ML) methods.
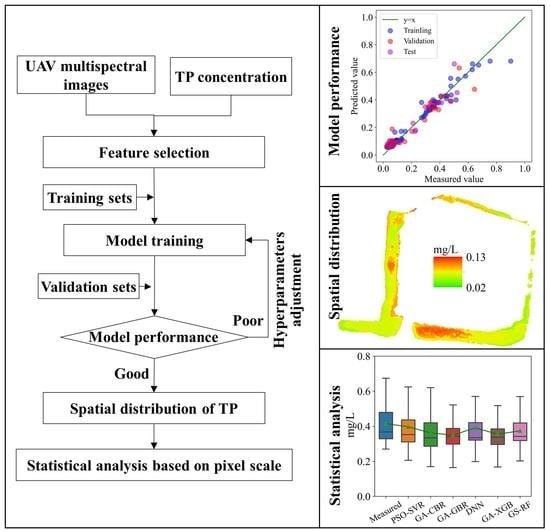
In this paper, six IOA-ML models were developed to retrieve TP concentration. By incorporating the UAV multispectral images, we attempt to propose methods for small inland waterbodies monitoring with high reliability and transferability. The main objectives of this study include (1) evaluating the performances of TP retrieval of six IOA-ML models with paired in situ data and UAV multispectral images divided into training, validation, and test sets, (2) conducting the statistical analysis of TP concentration based on pixel scale, (3) verifying the transportability of the developed IOA-ML models. This study is helpful for monitoring the water quality in small inland waterbodies and provides technical support for the intelligent management of water environment.
4. Discussion
Feature engineering before ML model establishment is necessary, and previous studies have confirmed that optimal input features can improve the performance of water quality retrieval models [
12,
42]. For example, there are generally perfect correlations between water quality parameters and band combinations of Landsat images [
43]. However, there are only typically 4–7 multispectral bands in their study, and the feature selection is only based on the correlation between features and water quality parameters [
6,
10,
16,
42]. The multispectral imager used in this research has ten bands, and it is still unknow weather or not feature amplification and CFS can promote the model performance on TP retrieval in small inland waterbodies. The performances in the validation and test sets of the six IOA-ML models with feature amplification and CFS improved compared with those without feature amplification and CFS (
Table 6). For validation sets, the
RMSE decreased 5–18.91%,
R2 improved 0.49–6.62%, and
RPD improved 1.5–16%. For the test sets, the
RMSE decreased 1.04–30.11%,
R2 improved 0.2–7.29%, and
RPD improved 0.95–23.15%. Among the six IOA-ML models, the DNN improved the most in the validation sets and the second most in the test sets, although the r values between the selected feature subsets and the measured TP concentration were 0.83, 0.66, 0.82, −0.12, and 0.83, respectively. The robustness of established IOA-ML models with feature amplification and CFS showed great improvement. Research indicated that CFS-PSO feature selection can identify and remove irrelevant variables [
44] and revealed the superiority of the CFS procedure for the detection of optimal wavelengths [
45]. Therefore, choosing a suitable feature subset by CFS can effectively improve the accuracy of the TP retrieval models.
One of the limitations of the ML-based TP retrieval model is that its transferability is limited [
42]. Many studies used cross validation or splitting data into three sets to verify the feasibility of the ML-based water quality parameter retrieval models [
17,
25,
26,
46]. The paired TP concentration and reflectance values in this study were split into training, validation, and test sets, and model performances on the validation and test sets (
R2 = 0.7462–0.9124,
RMSE = 0.047–0.0792 mg/L,
RPD = 1.9849–3.379) showed a slight decline in different degrees compared to those on the training sets (
R2 = 8856–0.984,
RMSE = 0.0253–0.0699 mg/L,
RPD = 2.9565–7.9153), but the overall performances maintained a good balance. The results suggested that slight overfitting existed in the developed IOA-ML models, but it was controlled at a good level. Remotely-sensed TP estimation is complex, and Politi et al. [
47] assessed 28 empirical algorithms sourced from the peer-reviewed literature using new satellite remote sensing data to identify the best water quality parameter retrieval algorithms in terms of accuracy and transferability and concluded that none of them exhibited satisfactory promise. One study showed that the best TSS retrieval model developed by a local dataset was accurate when applied to other areas [
48]. Another UAV multispectral images without water sampling on 12 May 2022 in research area B were directly used to retrieve TP concentration combined with the established models. The retrieved TP concentration of the PSO-SVR, GA-CBR, GA-GBR, DNN, GA-XGB, and GS-RF models were 0.1273 ± 0.0346 mg/L, 0.1946 ± 0.0108 mg/L, 0.2356 ± 0.0117 mg/L, 0.151 ± 0.0273 mg/L, 0.224 ± 0.0226 mg/L, and 0.1432 ± 0.0111 mg/L, respectively. The r values of TP concentration based on pixel scale derived from any two IOA-ML models were 0.4342–0.9083. Although the accuracy of the developed models may be mediocre when directly used in other flights under different external environments, such as temperature and sunlight intensity and hydrological regimes [
22], it can still estimate the TP concentration of each pixel in the entire research area. In summary, the developed IOA-ML models have certain transferability at the research areas and can be easily applied to other regions by retraining the models with new data.
Although several approaches, including dividing the paired data into three sets and applying established models to other multispectral images, had been adopted to verify the transferability of the established models, the established models had not been verified using datasets in a separate waterbody. In addition, we only sampled at the edge of the ponds in research area C due to the constraints of financial support and time. For further research, we should collect more samples from various waterbodies and ensure that the sampling points are distributed as evenly as possible, and further establish more generalized and adaptable models.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}