
Information Fusion for Spaceborne GNSS-R Sea Surface Height Retrieval Using Modified Residual Multimodal Deep Learning Method


 ,
,
Abstract
:1. Introduction
2. Data
2.1. CYGNSS Data
2.2. DTU 18 Verification Model
3. Method
3.1. Construction of the New MRMDL Model
- (1)
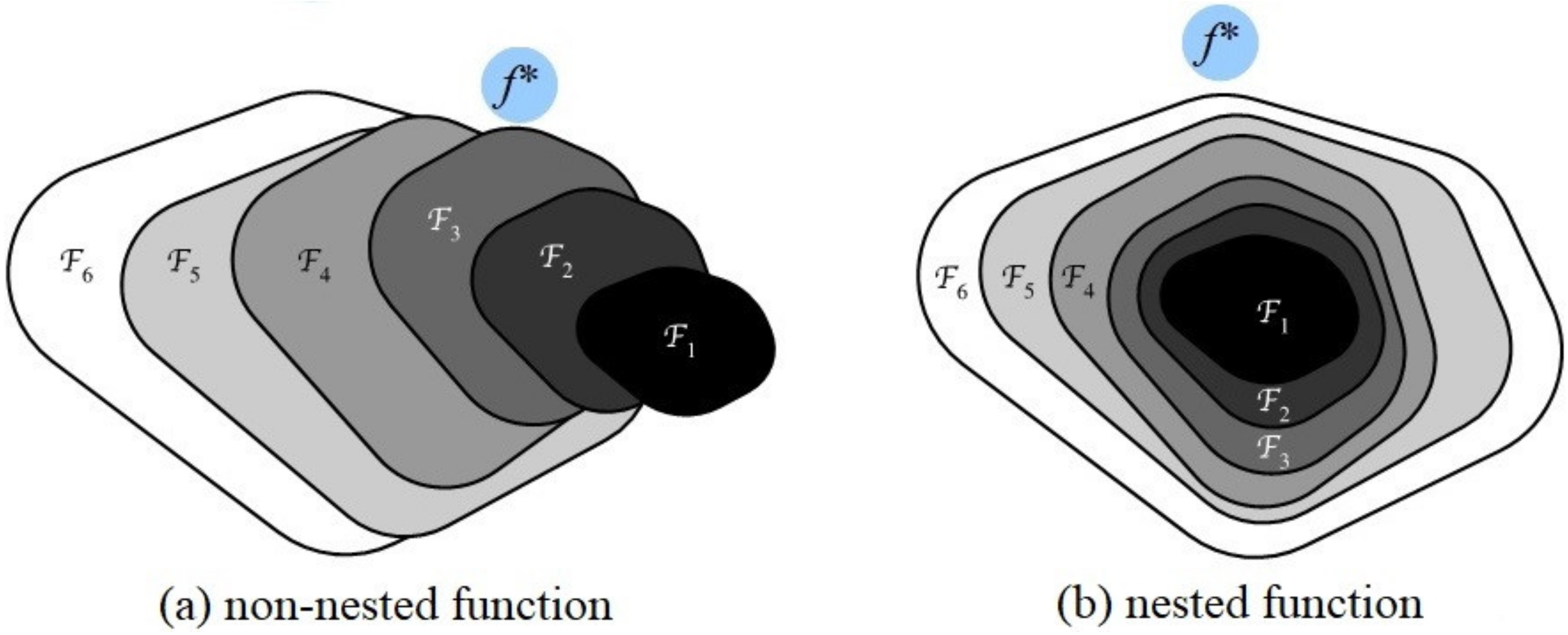
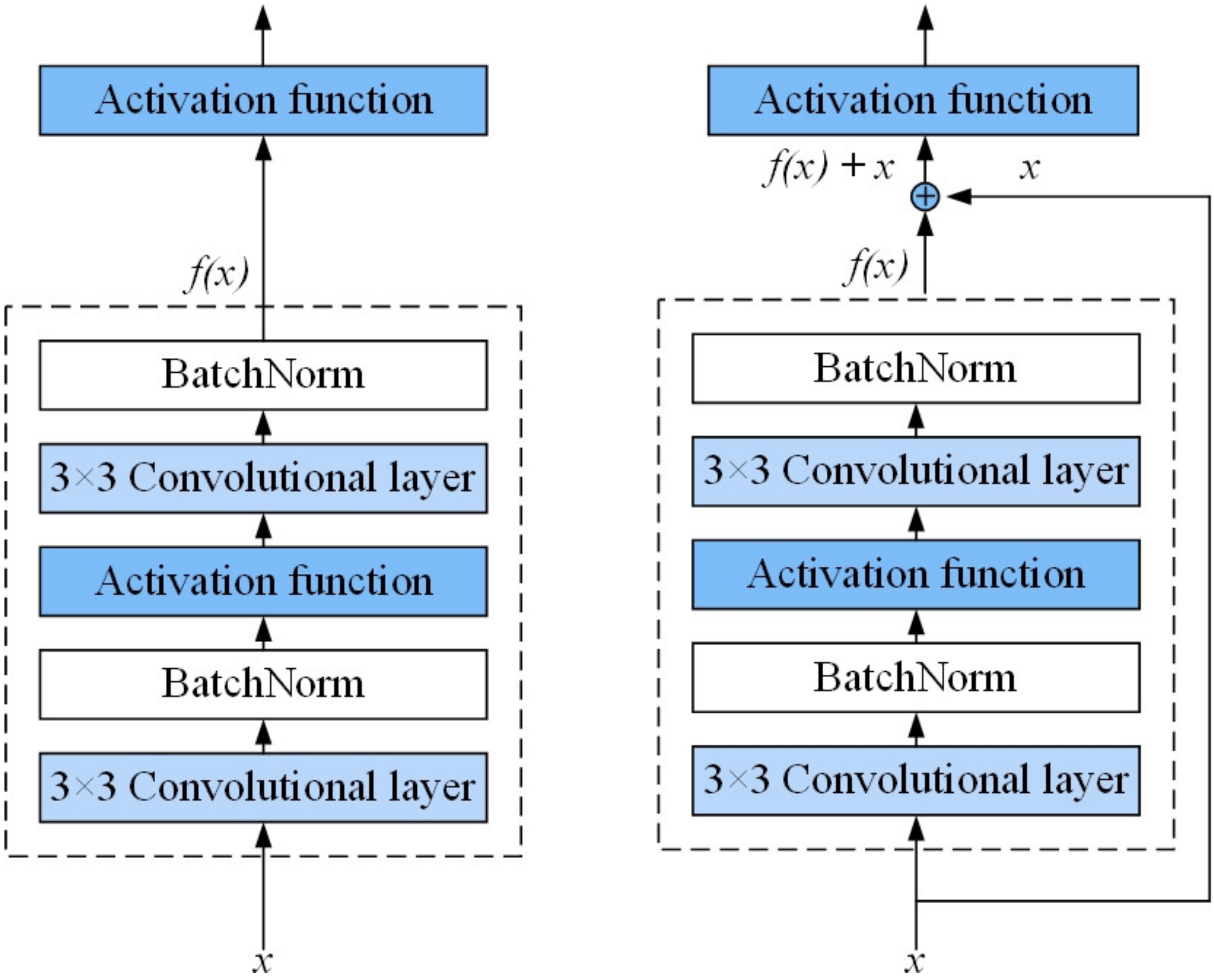
- The design of MResNet structure
- (2)
- The structure of the new MRMDL model
3.2. Data Preprocessing
- (a)
- Nan samples are all discarded.
- (b)
- DDM observations should be non-negative.
- (c)
- All land data should be excluded.
- (d)
- Data quality control (QC) flags provided by CYGNSS’s L1 level data set: quality_flags = 0, quality_flags_2 = 0.
- (e)
- The BRCS uncertainty is below 1.
- (f)
- The range correction gain of DDM is greater than 3
- (g)
- DDM Signal-to-noise Ratio (SNR) is larger than 5.
- (h)
- The elevation angle is greater than 60°.
3.3. Data Matching
4. Results and Discussion
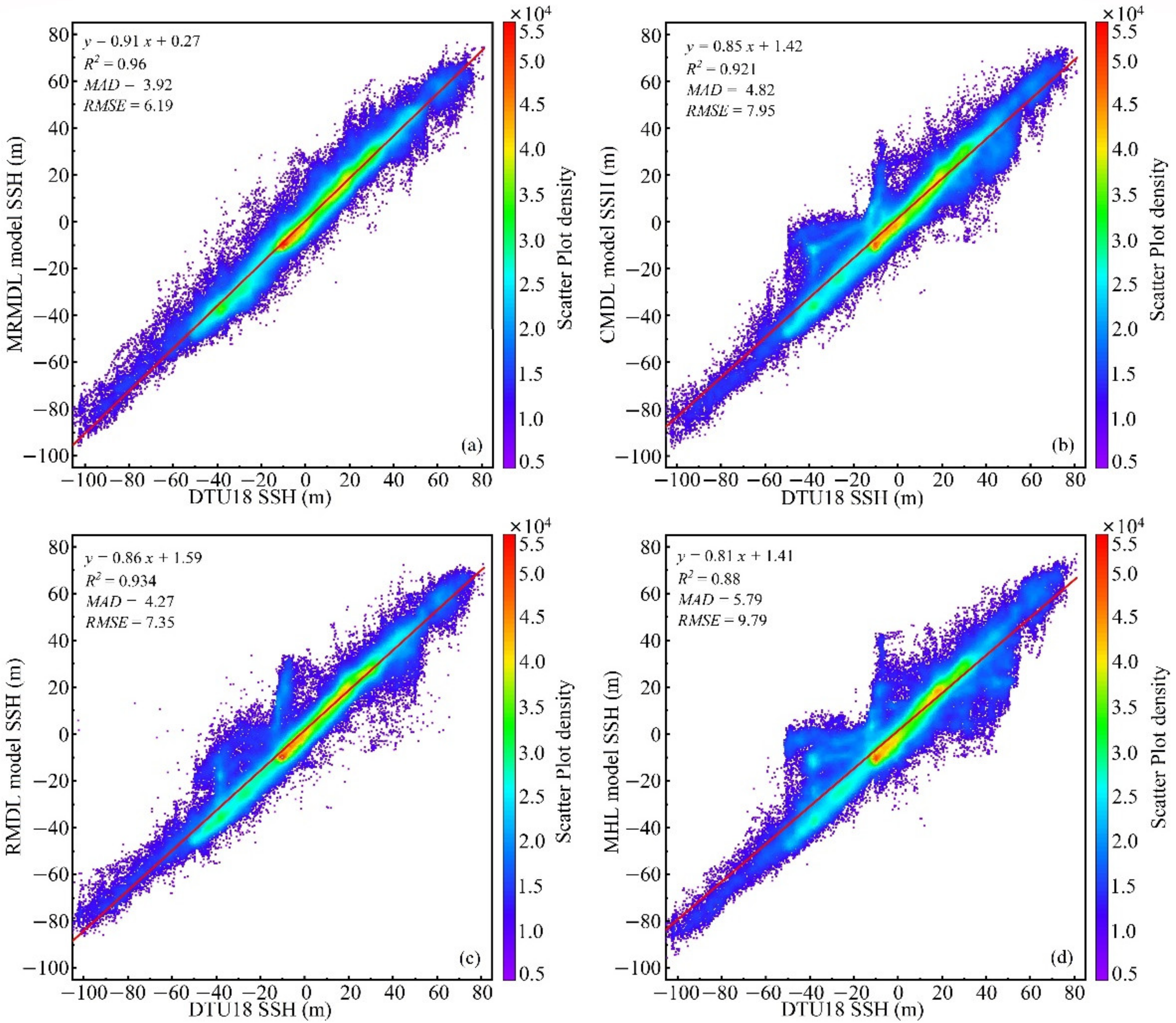
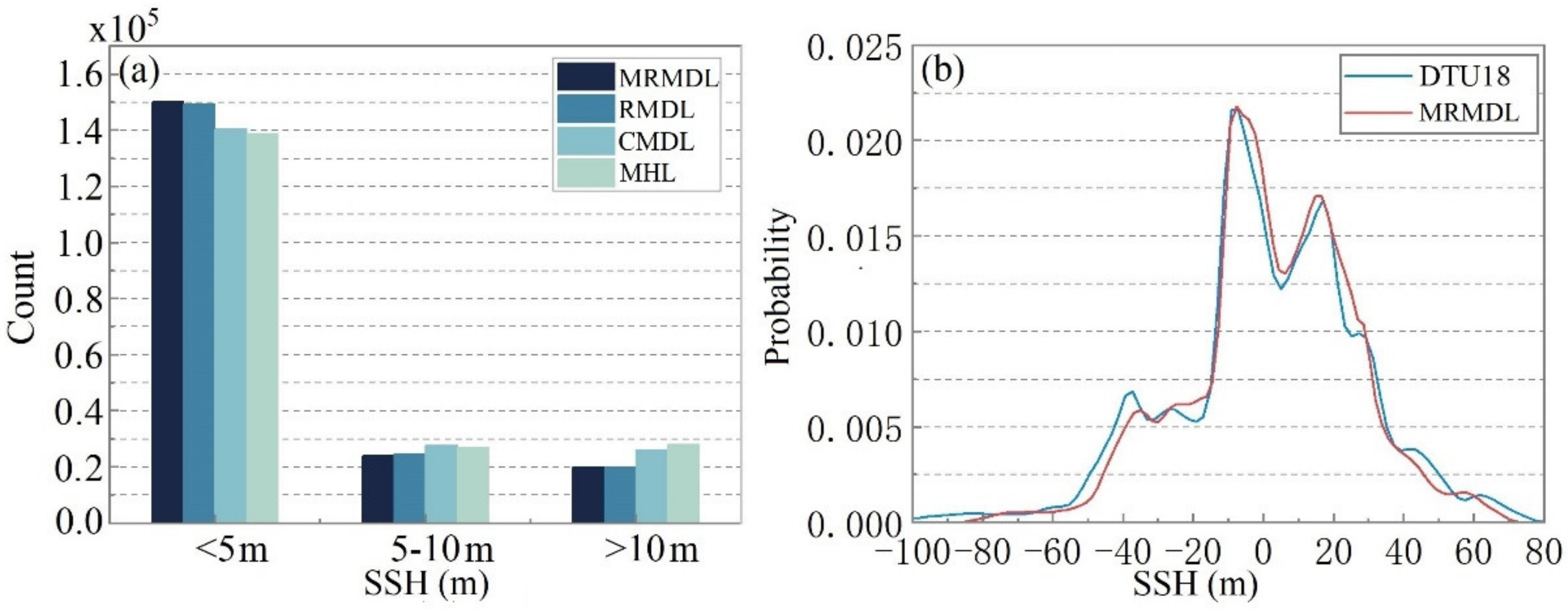
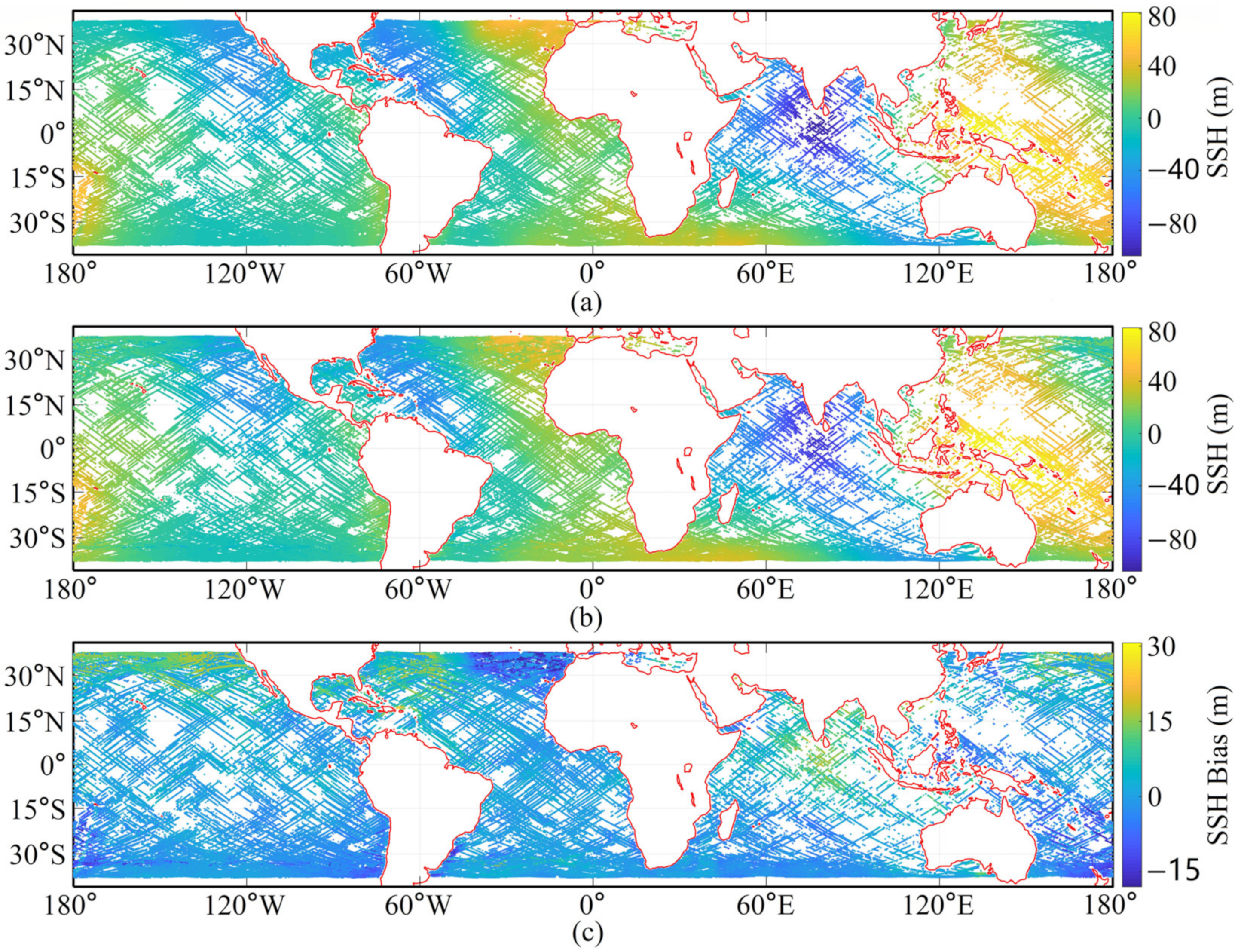
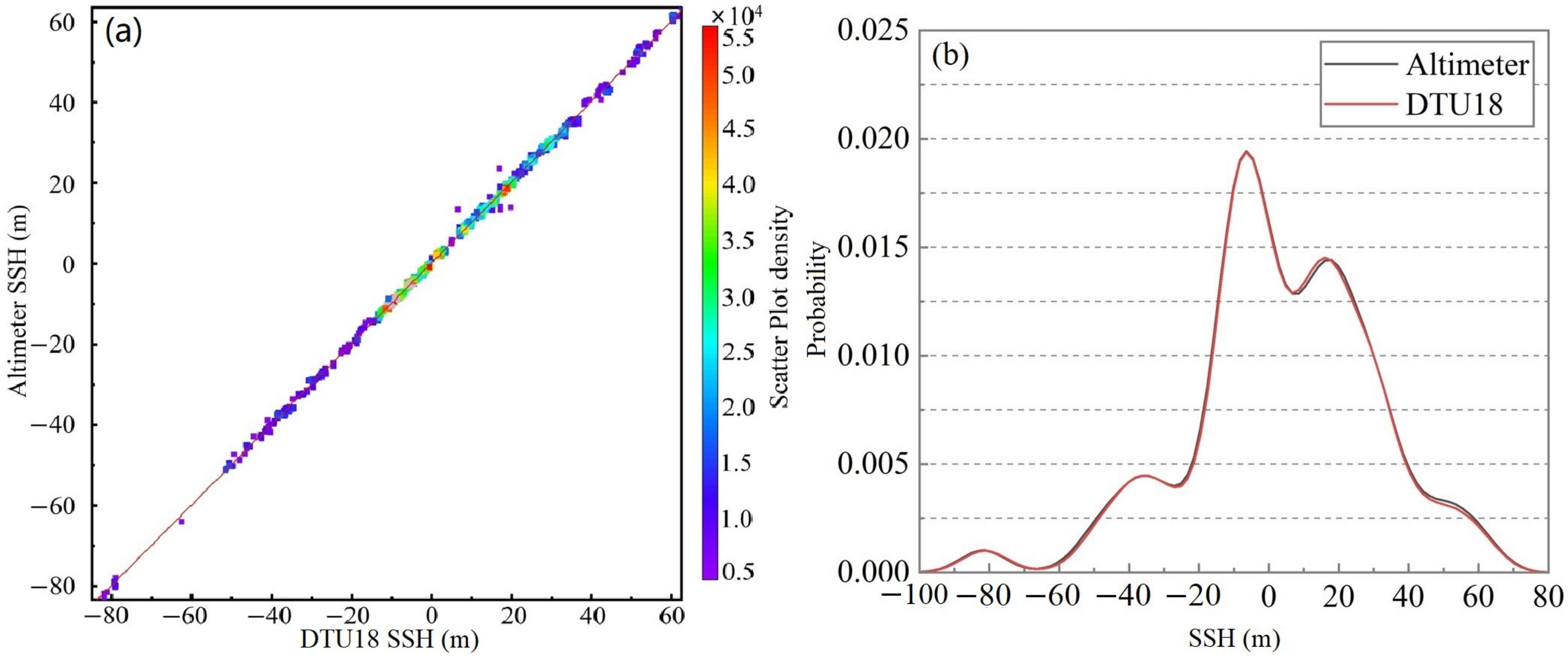
4.1. Validation Using SSH of DTU18 Verification Model
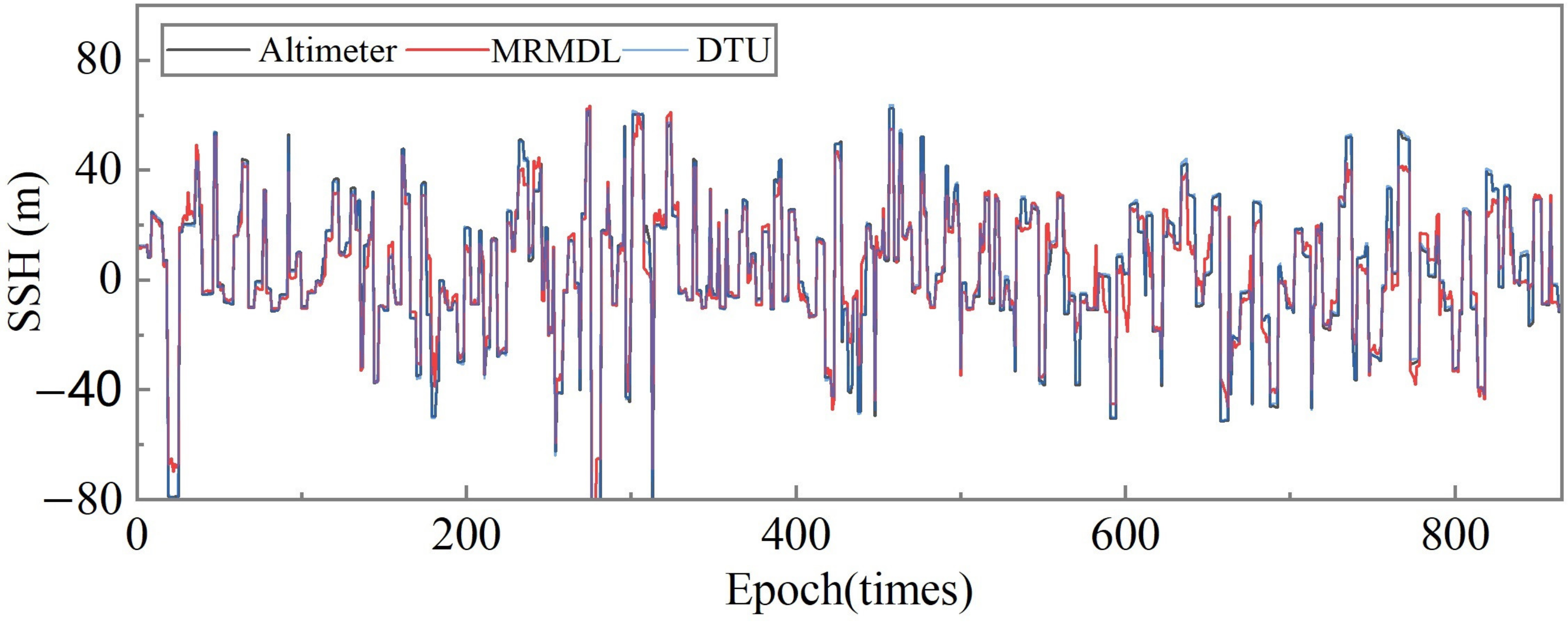
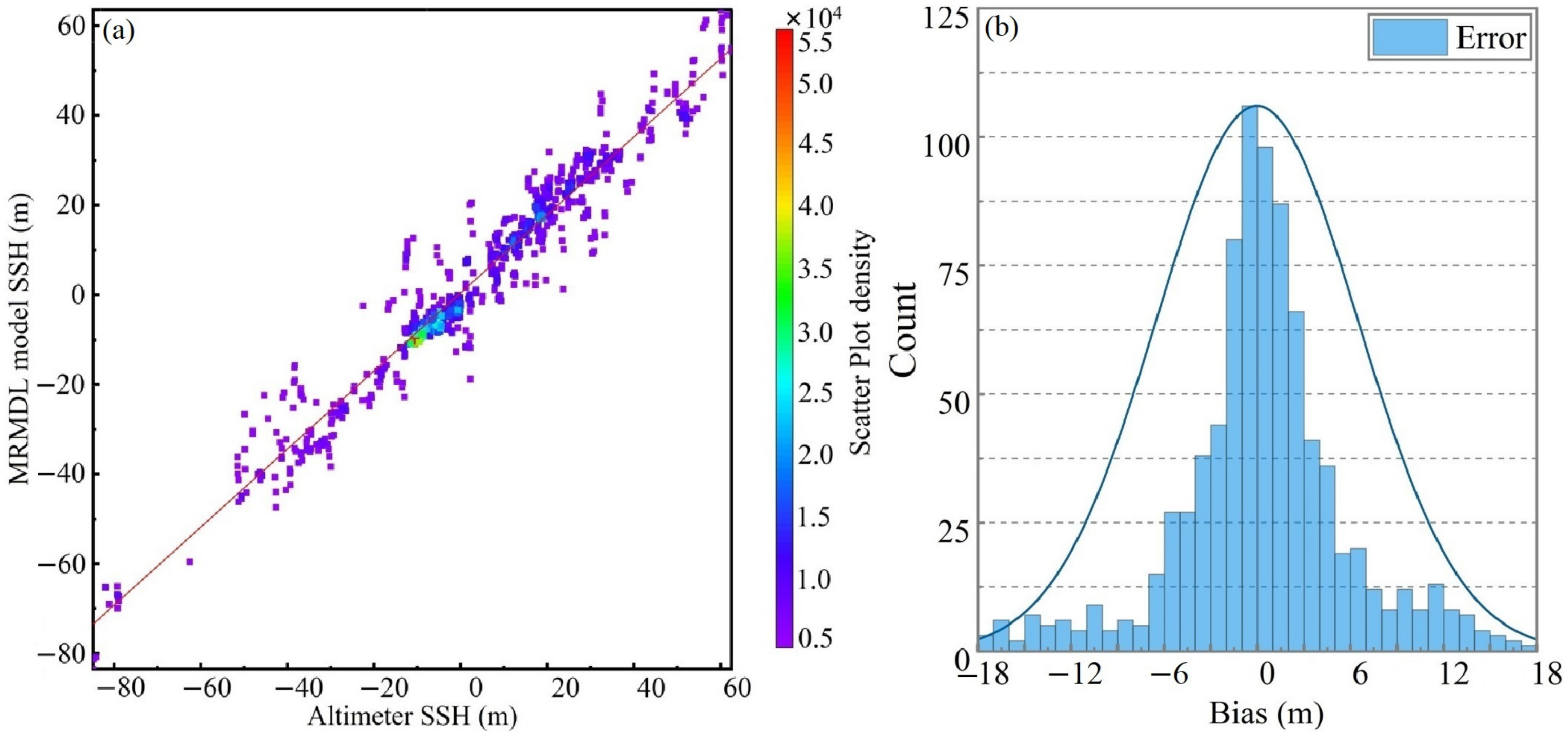
4.2. Validation with SSH of Spaceborne Radar Altimeter
4.3. Application of the New MRMDL Model
5. Conclusions
- (1)
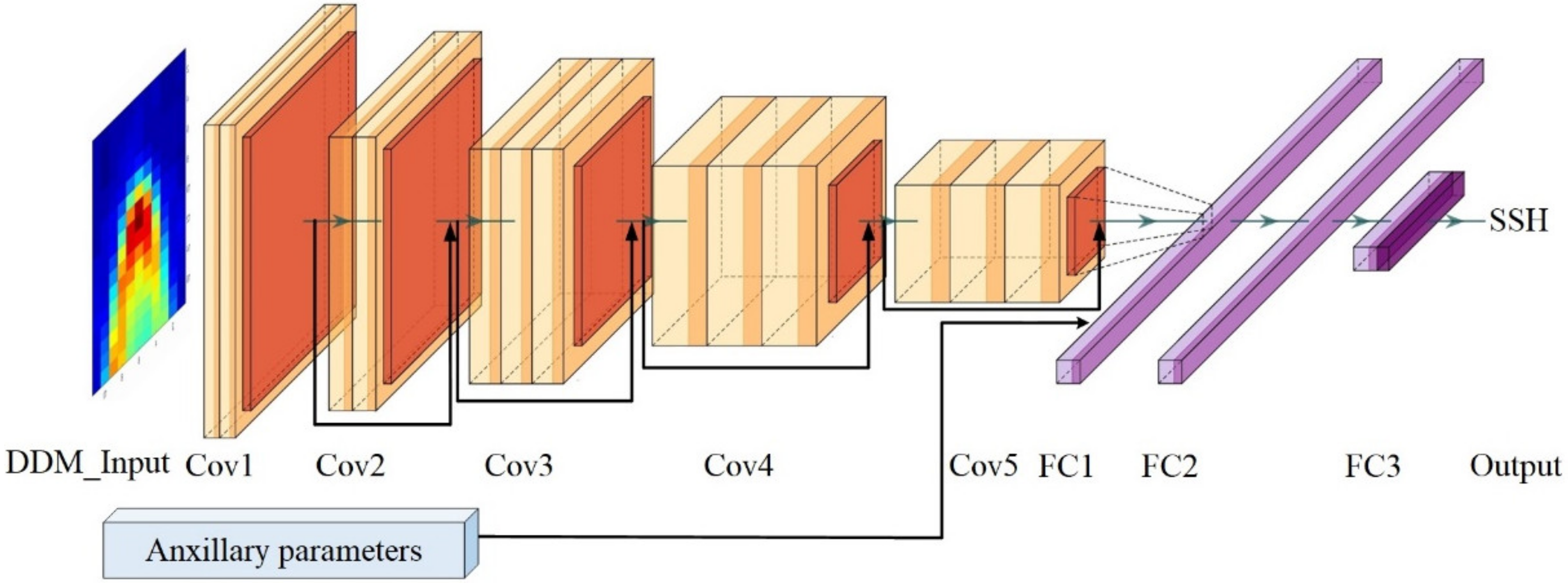
- The MRMDL model suggested in this study is primarily composed of MResNet and MHL-NN. First, MResNet is utilized to identify effective features from the combination of BRCS DDM and Raw DDM. Second, the proposed features are fused with the auxiliary parameter data in an additional fully connected layer. Final, MHL-NN is used to retrieve the sea surface height.
- (2)
- For the DDM reflected signal with low power, high noise, and tiny image size, a residual block applicable to the DDM structure is designed to adaptively identify effective features. The results show that the MResNet can retain more DDM information and produce advantageous retrieval results.
- (3)
- The reliability of the model was verified using SSH from tide-corrected DTU18 and spaceborne radar altimeters (Jason3, HY-2C, HY-2B). The results illustrate that the presented MRMDL model provides superior retrieval performance. Compared to the DTU18 validated model, the MAD, RMSE, and PCC are 3.92 m, 6.19 m, and 0.98, respectively. Compared to the SSH of the radar altimeter, the MAD, RMSE, and PCC are 4.32 m, 6.50 m, and 0.97, respectively.
- (4)
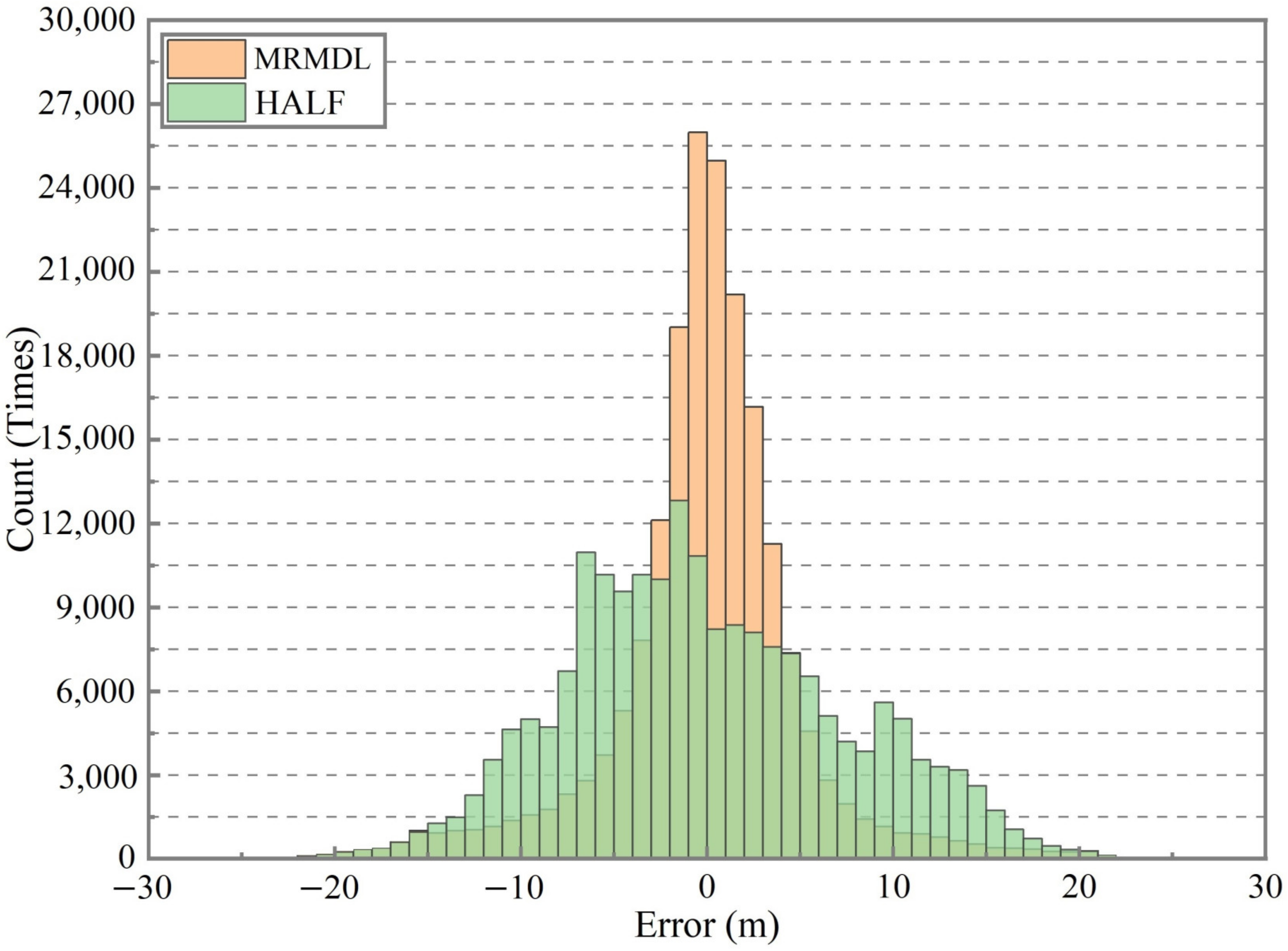
- Compared to the traditional HALF re-tracking approach, the SSH retrieval algorithm based on the MRMDL model can significantly improve SSH retrieval precision. The MAD and RMSE are decreased by about 35.21% and 17.25%, respectively; the PCC is enhanced by about 2.08%.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mashburn, J.; Axelrad, P.; Lowe, S.T.; Larson, K.M. Global ocean altimetry with GNSS reflections from TechDemoSat-1. IEEE Trans. Geosci. Remote Sens. 2018, 56, 4088–4097. [Google Scholar] [CrossRef]
- Chen, C.; Zhu, J.; Zhai, W.; Yan, L.; Zhao, Y.; Huang, X.; Yang, W. Absolute calibration of HY-2A and Jason-2 altimeters for sea surface height using GPS buoy in Qinglan, China. J. Oceanol. Limnol. 2019, 37, 1533–1541. [Google Scholar] [CrossRef]
- Liu, Z.; Zheng, W.; Wu, F.; Cui, Z.; Kang, G. A Necessary Model to Quantify the Scanning Loss Effect in Spaceborne iGNSS-R Ocean Altimetry. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 1619–1627. [Google Scholar] [CrossRef]
- Wu, F.; Zheng, W.; Liu, Z.; Sun, X. Improving the Specular Point Positioning Accuracy of Ship-borne GNSS-R Observations in China’s Seas based on a new Instantaneous Sea Reflection Surface Model. Front. Earth Sci. 2021, 9, 112–122. [Google Scholar] [CrossRef]
- Liu, Z.; Zheng, W.; Wu, F.; Kang, G.; Sun, X.; Wang, Q. Relationship Between Altimetric Quality and Along-Track Spatial Resolution for iGNSS-R Sea Surface Altimetry: Example for the Airborne Experiment. Front. Earth Sci. 2021, 9, 730513. [Google Scholar] [CrossRef]
- Clarizia, M.P.; Ruf, C.; Cipollini, P.; Zuffada, C. First spaceborne observation of sea surface height using GPS-reflectometry. Geophys. Res. Lett. 2016, 43, 767–774. [Google Scholar] [CrossRef] [Green Version]
- Wu, F.; Zheng, W.; Liu, Z. Quantifying GNSS-R Delay Sea State Bias and Predicting Its Variation Based on Ship-Borne Observations in China’s Seas. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1502705. [Google Scholar] [CrossRef]
- Liu, Z.; Zheng, W.; Wu, F.; Kang, G.; Li, Z.; Wang, Q.; Cui, Z. Increasing the Number of Sea Surface Reflected Signals Received by GNSS-Reflectometry Altimetry Satellite Using the Nadir Antenna Observation Capability Optimization Method. Remote Sens. 2019, 11, 2473. [Google Scholar] [CrossRef] [Green Version]
- Martin-Neira, M. A passive reflectometry and interferometry system (PARIS): Application to ocean altimetry. ESA J. 1993, 17, 331–355. [Google Scholar]
- He, Y.; Gao, F.; Xu, T.; Meng, X.; Wang, N. Coastal altimetry using interferometric phase from GEO satellite in quasi-zenith satellite system. IEEE Geosci. Remote Sens. Lett. 2021, 19, 3002505. [Google Scholar] [CrossRef]
- Cardellach, E.; Rius, A.; Martín-Neira, M.; Fabra, F.; Nogués-Correig, O.; Ribó, S.; Kainulainen, J.; Camps, A.; D’Addio, S.D. Consolidating the precision of interferometric GNSS-R ocean altimetry using airborne experimental data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4992–5004. [Google Scholar] [CrossRef]
- Wang, Q.; Zheng, W.; Wu, F.; Xu, A.; Zhu, H.; Liu, Z. A new GNSS-R altimetry algorithm based on machine learning fusion model and feature optimization to improve the precision of sea surface height retrieval. Front. Earth Sci. 2021, 9, 730565. [Google Scholar] [CrossRef]
- Sun, X.; Zheng, W.; Wu, F.; Liu, Z. Improving the iGNSS-R Ocean Altimetric Precision Based on the Coherent Integration Time Optimization Model. Remote Sens. 2021, 13, 4715. [Google Scholar] [CrossRef]
- Wu, F.; Zheng, W.; Li, Z.; Liu, Z. Improving the positioning accuracy of satellite-borne GNSS-R specular reflection point on sea surface based on the ocean tidal correction positioning method. Remote Sens. 2019, 11, 1626. [Google Scholar] [CrossRef] [Green Version]
- Ruf, C.S.; Chew, C.; Lang, T.; Morris, M.G.; Nave, K.; Ridley, A.; Balasubramaniam, R. A New Paradigm in Earth Environmental Monitoring with the CYGNSS Small Satellite Constellation. Sci. Rep. 2018, 8, 8782. [Google Scholar] [CrossRef] [Green Version]
- Li, W.; Cardellach, E.; Fabra, F.; Ribó, S.; Rius, A. Assessment of spaceborne GNSS-R ocean altimetry performance using CYGNSS mission raw data. IEEE Trans. Geosci. Remote Sens. 2020, 58, 238–250. [Google Scholar] [CrossRef]
- Cardellach, E.; Li, W.; Rius, A.; Semmling, M.; Wickert, J.; Zus, F.; Ruf, C.; Buontempo, C. First Precise Spaceborne Sea Surface Altimetry With GNSS Reflected Signals. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 102–112. [Google Scholar] [CrossRef]
- Mashburn, J.; Axelrad, P.; Zuffada, C.; Loria, E.; O’Brien, A.; Haines, B. Improved GNSS-R ocean surface altimetry with CYGNSS in the seas of indonesia. IEEE Trans. Geosci. Remote Sens. 2020, 58, 6071–6087. [Google Scholar] [CrossRef]
- Mashburn, J.R. Analysis of GNSS-R Observations for Altimetry and Characterization of Earth Surfaces. Ph.D. Thesis, University of Colorado, Boulder, CO, USA, 2018. [Google Scholar]
- Chu, X.; He, J.; Song, H.; Qi, Y.; Sun, Y.; Bai, W.; Li, W.; Wu, Q. Multimodal deep learning for heterogeneous GNSS-R data fusion and ocean wind speed retrieval. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 5971–5981. [Google Scholar] [CrossRef]
- Liu, Y.; Collett, I.; Morton, Y.J. Application of neural network to GNSS-R wind speed retrieval. IEEE Trans. Geosci. Remote Sens. 2019, 57, 9756–9766. [Google Scholar] [CrossRef]
- Li, X.; Yang, D.; Yang, J.; Zheng, G.; Han, G.; Nan, Y.; Li, W. Analysis of coastal wind speed retrieval from CYGNSS mission using artificial neural network. Remote Sens. Environ. 2021, 260, 112454. [Google Scholar] [CrossRef]
- Guo, W.; Du, H.; Guo, C.; Southwell, B.J.; Cheong, J.W.; Dempster, A.G. Information fusion for GNSS-R wind speed retrieval using statistically modified convolutional neural network. Remote Sens. Environ. 2022, 272, 112934. [Google Scholar] [CrossRef]
- Asgarimehr, M.; Arnold, C.; Weigel, T.; Ruf, C.; Wickert, J. GNSS reflectometry global ocean wind speed using deep learning: Development and assessment of CyGNSSnet. Remote Sens. Environ. 2022, 269, 112801. [Google Scholar] [CrossRef]
- Jia, Y.; Jin, S.; Savi, P.; Gao, Y.; Tang, J.; Chen, Y.; Li, W. GNSS-R soil moisture retrieval based on a XGboost machine learning aided method: Performance and validation. Remote Sens. 2019, 11, 1655. [Google Scholar] [CrossRef] [Green Version]
- Yan, Q.; Huang, W. Sea ice sensing from GNSS-R data using convolutional neural networks. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1510–1514. [Google Scholar] [CrossRef]
- Bu, J.; Yu, K.; Zuo, X.; Ni, J.; Li, Y.; Huang, W. GloWS-Net: A Deep Learning Framework for Retrieving Global Sea Surface Wind Speed Using Spaceborne GNSS-R Data. Remote Sens. 2023, 15, 590. [Google Scholar] [CrossRef]
- Yan, Q.; Chen, Y.; Jin, S.; Liu, S.; Jia, Y.; Zhen, Y.; Chen, T.; Huang, W. Inland Water Mapping Based on GA-LinkNet From CyGNSS Data. IEEE Geosci. Remote Sens. Lett. 2023, 20, 1500305. [Google Scholar] [CrossRef]
- Yan, S.H.; Zhang, N.; Chen, N.C.; Gong, J.Y. Using reflected signal power from the BeiDou geostationary satellites to estimate soil moisture. Remote Sens. Lett. 2019, 10, 1–10. [Google Scholar] [CrossRef]
- Wang, Q.; Zheng, W.; Wu, F.; Zhu, H.; Xu, A.; Shen, Y.; Zhao, Y. Improving the SSH Retrieval Precision of Spaceborne GNSS-R Based on a New Grid Search Multihidden Layer Neural Network Feature Optimization Method. Remote Sens. 2022, 14, 3161. [Google Scholar] [CrossRef]
- Hernández-Pajares, M.; Juan, J.M.; Sanz, J.; Orus, R.; Garcia-Rigo, A.; Feltens, J.; Komjathy, A.; Schaer, S.C.; Krankowski, A. The IGS VTEC maps: A reliable source of ionospheric information since 1998. J. Geod. 2008, 83, 263–275. [Google Scholar] [CrossRef]
- Yan, Z.; Zheng, W.; Wu, F.; Wang, C.; Zhu, H.; Xu, A. Correction of Atmospheric Delay Error of Airborne and Spaceborne GNSS-R Sea Surface Altimetry. Front. Earth Sci. 2022, 10, 730551. [Google Scholar] [CrossRef]
- Leandro, R.; Santos, M.; Langley, R.B. UNB neutral atmosphere models: Development and performance. In Proceedings of the 2006 National Technical Meeting of the Institute of Navigation, Monterey, CA, USA, 18–20 January 2006; Volume 2, pp. 564–573. [Google Scholar]
- Wang, S. Inversion of GNSS-R Sea Surface Wind Speed Based on Neural Network Model. Master’s Thesis, National Space Science Center, Chinese Academy of Sciences, Beijing, China, 2020. [Google Scholar]
- Liu, S. CYGNSS Sea Surface Reflection Signal Calibration and Verification. MD. Thesis, Nanjing University of Information Science and Technology, Nanjing, China, 2022. (In Chinese). [Google Scholar]
- Yuan, J.; Guo, J.; Niu, Y.; Zhu, C.; Li, Z. Mean sea surface model over the sea of Japan determined from multi-satellite altimeter data and tide gauge records. Remote Sens. 2020, 12, 4168. [Google Scholar] [CrossRef]
- Egbert, G.D.; Erofeeva, S.Y. Efficient inverse modeling of barotropic ocean tides. J. Atmos. Ocean. Technol. 2002, 19, 183–204. [Google Scholar] [CrossRef]
- Jiang, C.; Shen, J.; Chen, S.; Chen, Y.; Liu, D.; Bo, Y. UWB NLOS/LOS Classification Using Deep Learning Method. IEEE Commun. Lett. 2020, 24, 2226–2230. [Google Scholar] [CrossRef]
- Hu, X.-D.; Wang, X.-Q.; Meng, F.-J.; Hua, X.; Yan, Y.-J.; Li, Y.-Y.; Huang, J.; Jiang, X.-L. Gabor-CNN for object detection based on small samples. Def. Technol. 2020, 16, 1116–1129. [Google Scholar] [CrossRef]
- Yang, H.; Zhang, Y.-S.; Yin, C.-B.; Ding, W.-Z. Ultra-lightweight CNN design based on neural architecture search and knowledge distillation: A novel method to build the automatic recognition model of space target ISAR images. Def. Technol. 2022, 18, 1073–1095. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 12 December 2016; pp. 770–778. [Google Scholar]
- Reynolds, J.; Clarizia, M.P.; Santi, E. Wind speed estimation from CYGNSS using artificial neural networks. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 708–716. [Google Scholar] [CrossRef]
- Garrison, J.L. A statistical model and simulator for ocean-reflected GNSS signals. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6007–6019. [Google Scholar] [CrossRef]
- Zawadzki, L.; Ablain, M. Accuracy of the mean sea level continuous record with future altimetric missions: Jason-3 vs. Sentinel-3a. Ocean Sci. 2016, 12, 9–18. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Xu, H.; Yang, L.; Song, Q.; Ma, C. Cross-calibrations of the HY-2B altimeter using Jason-3 satellite during the period of april 2019–september 2020. Front. Earth Sci. 2021, 9, 647583. [Google Scholar] [CrossRef]
- Man, E.; Dumont, J.P.; Rosmorduc, V.; Picot, N.; Desai, S.; Bonekamp, H.; Figa, J.; Lillibridge, J.; Scharroo, R. Jason-3 Products Handbook; CNES: Belin, Germany; EUMETSAT: Darmstadt, Germany; NOAA: Washington, DC, USA, 2015. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial | Variable Name | Brief Description | Serial | Variable Name | Brief Description |
|---|---|---|---|---|---|
| 1 | SNR | DDM Signal-to-noise ratio | 7 | SP_dopp | DDM Specular point delay column |
| 2 | SP_incidence | Incidence angle of specular reflection point | 8 | ddm_noise_floor | DDM noise floor |
| 3 | rx_to_sp_range | CYGNSS to specular point distance | 9 | Ionosphere | ionospheric delay |
| 4 | tx_to_sp_range | GPS to specular point distance | 10 | Troposphere | tropospheric delay |
| 5 | Peak_delay | DDM peak delay row | 11 | ERA5 U10 | ERA5 U10 Wind speed |
| 6 | Peak_dopp | DDM peak Doppler column | 12 | ERA5 V10 | ERA5 V10 Wind speed |
| Layer Name | ResNet | ResNet Output Size | MResNet | MResNet Output Size |
|---|---|---|---|---|
| Conv1 | ||||
| Conv2 | max pool | |||
| Conv3 | ||||
| Conv4 | ||||
| Conv5 |
| Layer Name | RMDL | CMDL | MRMDL | MHL |
|---|---|---|---|---|
| Conv1 | (2, 64) | (2, 64) | (2, 64) | - |
| Conv2 | (64, 256) | (64, 32) | (64, 32) | - |
| Conv3 | (256, 512) | (32, 16) | (32, 16) | - |
| Conv4 | (512, 1024) | (16, 8) | (16, 8) | - |
| Conv5 | (1024, 2048) | (8, 4) | (8, 4) | - |
| FC1 | 200 | 200 | 200 | 200 |
| FC2 | 200 | 200 | 200 | 200 |
| FC3 | 200 | 200 | 200 | 200 |
| FC4 | 200 | 200 | 200 | 200 |
| MHL | CMDL | RMDL | MRMDL | |
|---|---|---|---|---|
| MAD (m) | 5.09 | 4.82 | 4.27 | 3.92 |
| RMSE (m) | 8.12 | 7.95 | 7.35 | 6.19 |
| PCC | 0.94 | 0.96 | 0.97 | 0.98 |
| Running Time (s) | 30.34 | 33.92 | 530.31 | 54.01 |
| MAD (m) | RMSE (m) | PCC | |
|---|---|---|---|
| HALF | 6.05 | 7.48 | 0.96 |
| MRMDL | 3.92 | 6.19 | 0.98 |
| Improve (%) | 35.21 | 17.25 | 2.08 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Q.; Zheng, W.; Wu, F.; Zhu, H.; Xu, A.; Shen, Y.; Zhao, Y. Information Fusion for Spaceborne GNSS-R Sea Surface Height Retrieval Using Modified Residual Multimodal Deep Learning Method. Remote Sens. 2023, 15, 1481. https://doi.org/10.3390/rs15061481
Wang Q, Zheng W, Wu F, Zhu H, Xu A, Shen Y, Zhao Y. Information Fusion for Spaceborne GNSS-R Sea Surface Height Retrieval Using Modified Residual Multimodal Deep Learning Method. Remote Sensing. 2023; 15(6):1481. https://doi.org/10.3390/rs15061481
Chicago/Turabian StyleWang, Qiang, Wei Zheng, Fan Wu, Huizhong Zhu, Aigong Xu, Yifan Shen, and Yelong Zhao. 2023. "Information Fusion for Spaceborne GNSS-R Sea Surface Height Retrieval Using Modified Residual Multimodal Deep Learning Method" Remote Sensing 15, no. 6: 1481. https://doi.org/10.3390/rs15061481
APA StyleWang, Q., Zheng, W., Wu, F., Zhu, H., Xu, A., Shen, Y., & Zhao, Y. (2023). Information Fusion for Spaceborne GNSS-R Sea Surface Height Retrieval Using Modified Residual Multimodal Deep Learning Method. Remote Sensing, 15(6), 1481. https://doi.org/10.3390/rs15061481