
Spatial–Temporal Fusion of 10-Min Aerosol Optical Depth Products with the GEO–LEO Satellite Joint Observations

 ,
, 
 ,
, 
Abstract
:1. Introduction
2. Datasets
2.1. Himawari-8 AHI Data
2.2. Terra and Aqua MODIS Data
2.3. CALIPSO CALIOP Data
2.4. Ground-Based Data
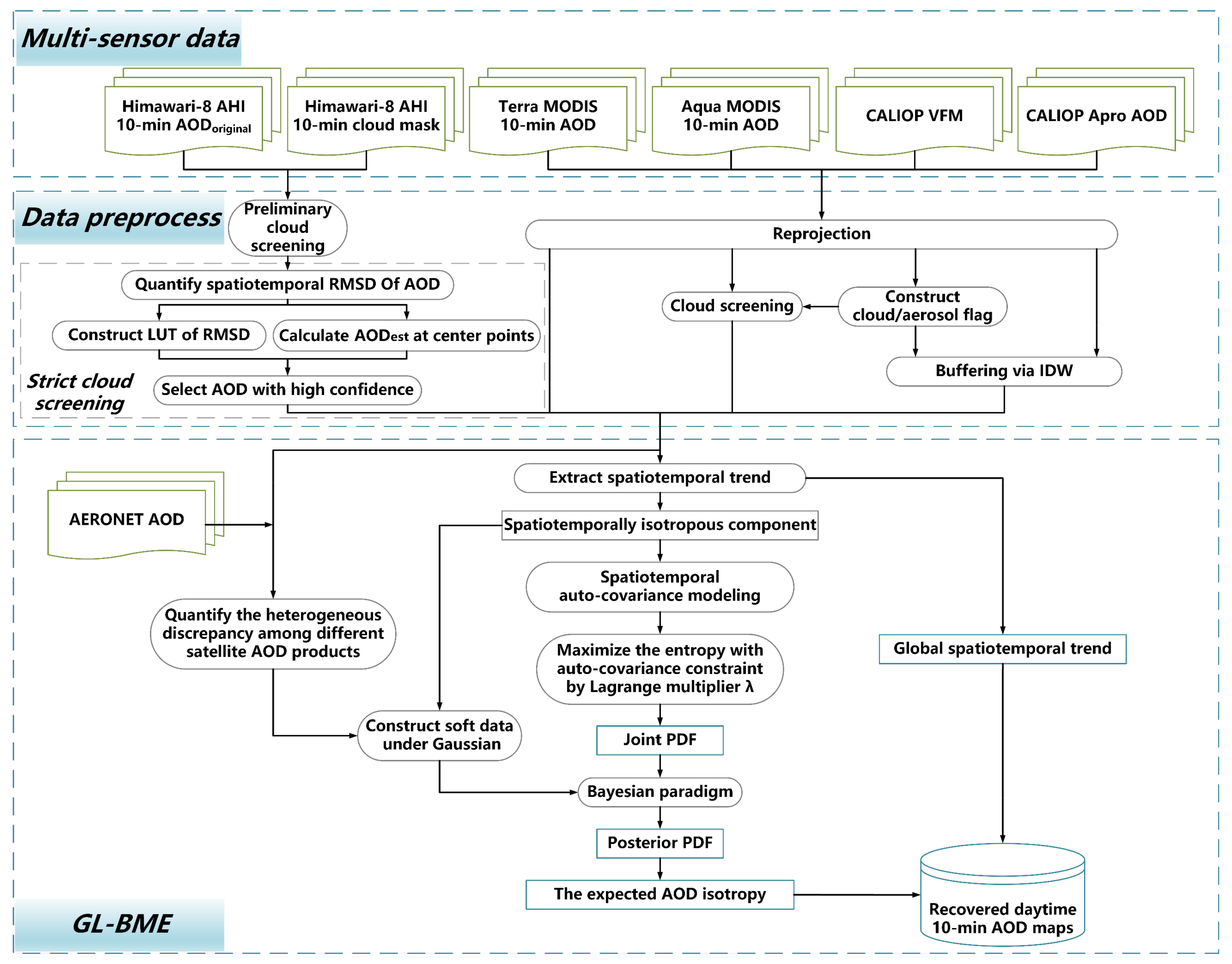
3. Methodology
3.1. Data Preprocessing
3.2. LEO/GEO-Integrated AOD Fusion Process
3.2.1. BME Method
3.2.2. Soft Data Construction
3.2.3. Spatiotemporal Covariance Modeling
4. Experimental Results and Analysis
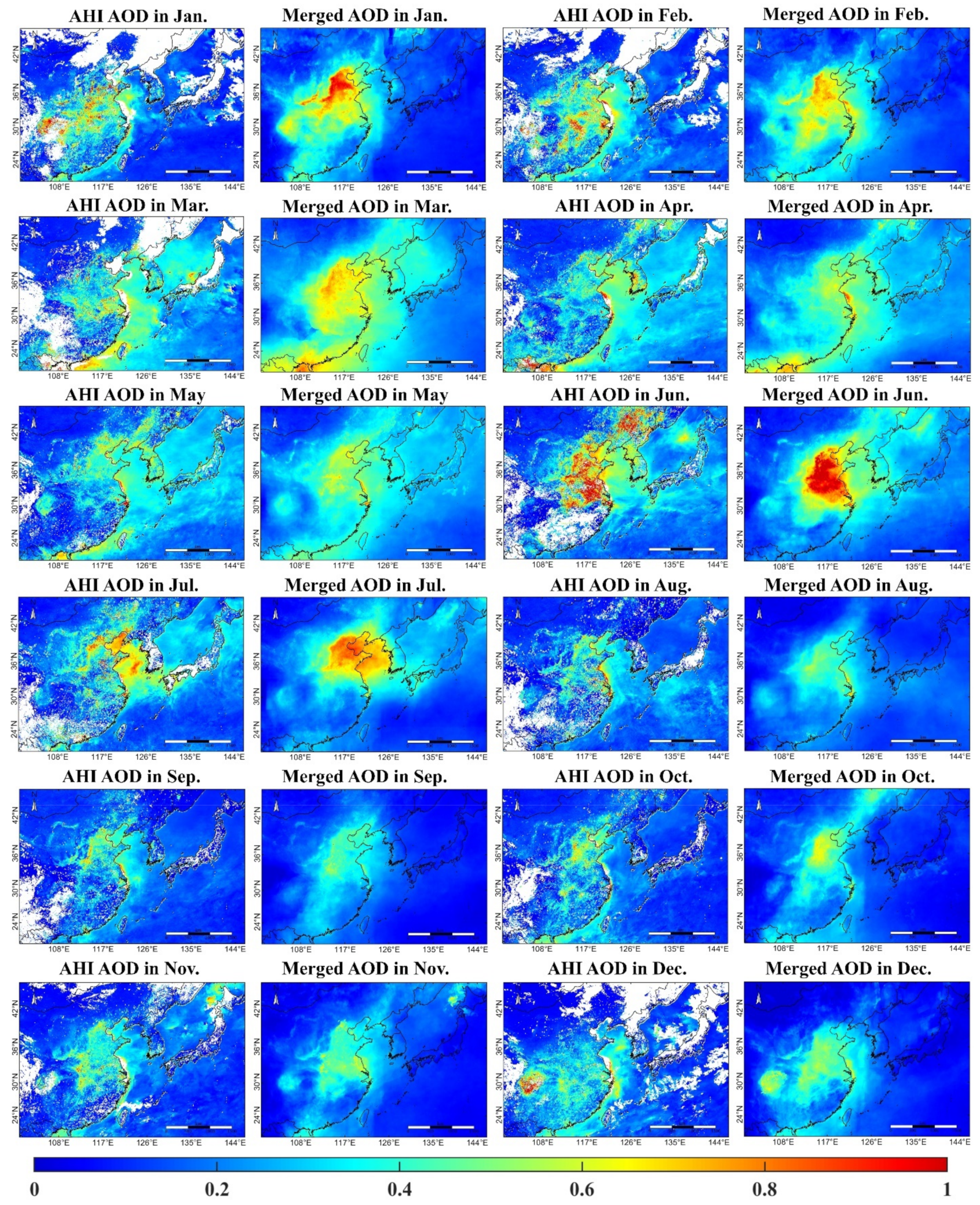
4.1. Assessment of the Completeness of Merged AOD
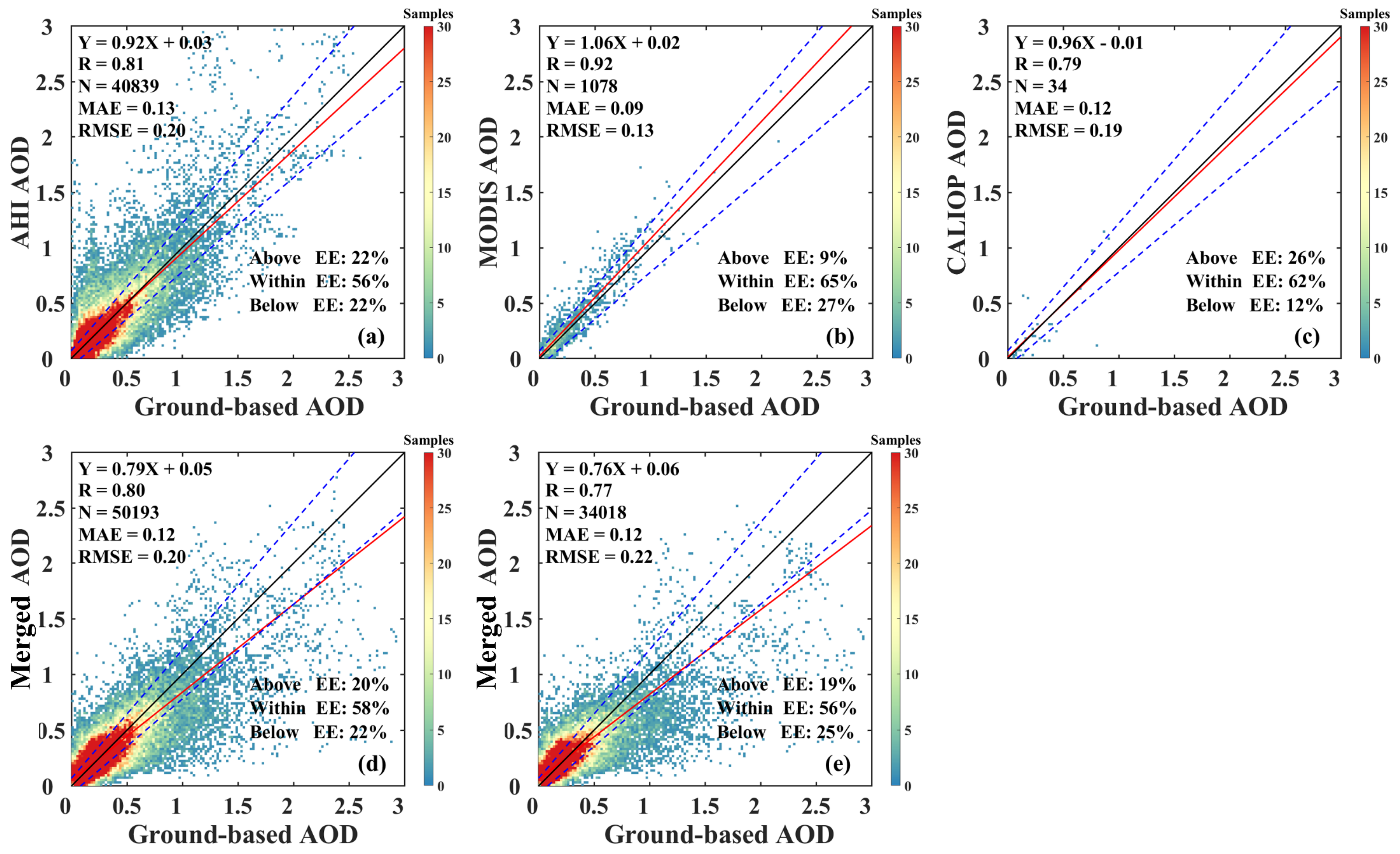
4.2. Accuracy Evaluation for Merged AOD
4.3. Error Analysis and Performance of AOD Fusion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lin, J.T.; Van Donkelaar, A.; Xin, J.Y.; Che, H.Z.; Wang, Y.S. Clear-sky aerosol optical depth over East China estimated from visibility measurements and chemical transport modeling. Atmos. Environ. 2014, 95, 258–267. [Google Scholar] [CrossRef]
- Stocker, T.F.; Qin, D.; Plattner, G.K.; Tignor, M.M.B.; Allen, S.K.; Boschung, J.; Midgley, P.M. Contribution of working group I to the fifth assessment report of the intergovernmental panel on climate change. Clim. Chang. 2013, 5, 1–1552. [Google Scholar]
- Sherman, J.P.; Sheridan, P.J.; Ogren, J.A.; Andrews, E.; Hageman, D.; Schmeisser, L.; Sharma, S.A. multi-year study of lower tropospheric aerosol variability and systematic relationships from four North American regions. Atmos. Chem. Phys. 2015, 15, 12487–12517. [Google Scholar] [CrossRef] [Green Version]
- Zhang, T.; Zeng, C.; Gong, W.; Wang, L.; Sun, K.; Shen, H.; Zhu, Z. Improving spatial coverage for aqua MODIS AOD using NDVI-based multi-temporal regression analysis. Remote Sens. 2017, 9, 340. [Google Scholar] [CrossRef] [Green Version]
- Anderson, T.L.; Charlson, R.J.; Bellouin, N.; Boucher, O.; Chin, M.; Christopher, S.A.; Haywood, J.; Kaufman, Y.J.; Kinne, S.; Ogren, J.A. An “a-train” strategy for quantifying direct climate forcing by anthropogenic aerosols. Bull. Am. Meteorol. Soc. 2005, 86, 1795. [Google Scholar] [CrossRef]
- Barnaba, F.; Gobbi, G.P. Aerosol seasonal variability over the Mediterranean region and relative impact of maritime, continental and Saharan dust particles over the basin from MODIS data in the year 2001. Atmos. Chem. Phys. 2014, 4, 2367–2391. [Google Scholar] [CrossRef] [Green Version]
- Pappas, V.; Hatzianastassiou, N.; Papadimas, C.; Matsoukas, C.; Kinne, S.; Vardavas, I. Evaluation of spatio-temporal variability of Hamburg Aerosol Climatology against aerosol datasets from MODIS and CALIOP. Atmos. Chem. Phys. 2013, 13, 8381–8399. [Google Scholar] [CrossRef] [Green Version]
- Alexandrov, M.D.; Geogdzhayev, I.V.; Tsigaridis, K.; Marshak, A.; Levy, R.; Cairns, B. New statistical model for variability of aerosol optical thickness: Theory and application to MODIS data over ocean. J. Atmos. Sci. 2016, 73, 821–837. [Google Scholar] [CrossRef]
- Abuelgasim, A.; Bilal, M.; Alfaki, I.A. Spatiotemporal variations and long term trends analysis of aerosol optical depth over the United Arab Emirates. Remote Sens. Appl. 2021, 23, 100532. [Google Scholar] [CrossRef]
- Dubovik, O.; Schuster, G.L.; Xu, F.; Hu, Y.; Bösch, H.; Landgraf, J.; Li, Z. Grand challenges in satellite remote sensing. Front. Remote Sens. 2021, 2, 619818. [Google Scholar] [CrossRef]
- Xie, Y.; Xue, Y.; Guang, J.; Mei, L.; She, L.; Li, Y.; Fan, C. Deriving a global and hourly data set of aerosol optical depth over land using data from four geostationary satellites: GOES-16, MSG-1, MSG-4, and Himawari-8. IEEE Trans. Geosci. Remote Sens. 2019, 58, 1538–1549. [Google Scholar] [CrossRef]
- Chen, T.; Li, Z.; Kahn, R.A.; Zhao, C.; Rosenfeld, D.; Guo, J.; Chen, D. Potential impact of aerosols on convective clouds revealed by Himawari-8 observations over different terrain types in eastern China. Atmos. Chem. Phys. 2021, 21, 6199–6220. [Google Scholar] [CrossRef]
- Andreae, M.O.; Rosenfeld, D.J. Aerosol–cloud–precipitation interactions. Part 1. The nature and sources of cloud-active aerosols. Earth-Sci. Rev. 2008, 89, 13–41. [Google Scholar] [CrossRef]
- Kikuchi, M.; Murakami, H.; Suzuki, K.; Nagao, T.M.; Higurashi, A. Improved Hourly Estimates of Aerosol Optical Thickness Using Spatiotemporal Variability Derived from Himawari-8 Geostationary Satellite. IEEE Trans. Geosci. Remote Sens. 2018, 56, 3442–3455. [Google Scholar] [CrossRef]
- Okuyama, A.; Andou, A.; Date, K.; Hoasaka, K.; Mori, N.; Murata, H.; Bessho, K. Preliminary validation of Himawari-8/AHI navigation and calibration. Earth Obs. Syst. XX 2015, 9607, 663–672. [Google Scholar]
- Xia, X.; Min, J.; Wang, Y.; Shen, F.; Yang, C.; Sun, Z. Assimilating Himawari-8 AHI aerosol observations with a rapid-update data assimilation system. Atmos. Environ. 2019, 215, 116866. [Google Scholar] [CrossRef]
- Lim, H.; Go, S.; Kim, J.; Choi, M.; Lee, S.; Song, C.K.; Kasai, Y. Integration of GOCI and AHI Yonsei aerosol optical depth products during the 2016 KORUS-AQ and 2018 EMeRGe campaigns. Atmos. Meas. Tech. 2021, 14, 4575–4592. [Google Scholar] [CrossRef]
- Lippmann, M.; Ito, K.; Nadas, A.; Burnett, R.T. Association of particulate matter components with daily mortality and morbidity in urban populations. Res. Rep. Health Eff. Inst. 2000, 95, 5–72. [Google Scholar]
- Tzanis, C.; Varotsos, C.; Christodoulakis, J.; Tidblad, J.; Ferm, M.; Ionescu, A.; Lefevre, R.A.; Theodorakopoulou, K.; Kreislova, K. On the corrosion and soiling effects on materials by air pollution in Athens, Greece. Atmos. Chem. Phys. 2011, 11, 12039–12048. [Google Scholar] [CrossRef] [Green Version]
- Varotsos, C.; Ondov, J.; Tzanis, C.; Öztürk, F.; Nelson, M.; Ke, H.; Christodoulakis, J. An observational study of the atmospheric ultra-fine particle dynamics. Atmos. Environ. 2012, 59, 312–319. [Google Scholar] [CrossRef]
- Carrer, D.; Ceamanos, X.; Six, B.; Roujean, J.L. AERUS-GEO: A newly available satellite-derived aerosol optical depth product over Europe and Africa. Geophys. Res. Lett. 2014, 41, 7731–7738. [Google Scholar] [CrossRef]
- Ceamanos, X.; Six, B.; Riedi, J. Quasi-Global Maps of Daily Aerosol Optical Depth from a Ring of Five Geostationary Meteorological Satellites Using AERUS-GEO. J. Geophys. Res. Atmos. 2021, 126, 20. [Google Scholar] [CrossRef]
- Lee, S.; Song, C.H.; Park, R.S.; Park, M.E.; Han, K.M.; Kim, J.; Woo, J.H. GIST-PM-Asia v1: Development of a numerical system to improve particulate matter forecasts in South Korea using geostationary satellite-retrieved aerosol optical data over Northeast Asia. Geosci. Model Dev. 2016, 9, 17–39. [Google Scholar] [CrossRef] [Green Version]
- Xia, X.; Zhao, B.; Zhang, T.; Wang, L.; Gu, Y.; Liou, K.N.; Zhu, Z. Satellite-Derived Aerosol Optical Depth Fusion Combining Active and Passive Remote Sensing Based on Bayesian Maximum Entropy. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–13. [Google Scholar] [CrossRef]
- Abdou, W.A.; Diner, D.J.; Martonchik, J.V.; Bruegge, C.J.; Kahn, R.A.; Gaitley, B.J.; Crean, K.A.; Remer, L.A.; Holben, B. Comparison of coincident MISR and MODIS aerosol optical depths over land and oceans scenes containing AERONET sites. J. Geophys. Res. 2005, 110, D10S07. [Google Scholar]
- Kacenelenbogen, M.; Vaughan, M.A.; Redemann, J.; Hoff, R.M.; Rogers, R.R.; Ferrare, R.A.; Russell, P.B.; Hostetler, C.A.; Hair, J.W.; Holben, B.N. An accuracy assessment of the CALIOP/CALIPSO version 2/version 3 daytime aerosol extinction product based on a detailed multi-sensor, multi-platform case study. J. Geophys. Res. Atmos. 2011, 11, 3981–4000. [Google Scholar] [CrossRef] [Green Version]
- Schuster, G.L.; Vaughan, M.; MacDonnell, D.; Su, W.; Winker, D.; Dubrovik, O.; Lapyonok, T.; Trepte, C. Comparison of CALIPSO aerosol optical depth retrievals to AERONET measurements, and a climatology for the LIDAR ratio of dust. J. Atmos. Chem. Phys. 2012, 12, 7431–7452. [Google Scholar] [CrossRef] [Green Version]
- Han, B.; Ding, H.; Ma, Y.; Gong, W. Improving Retrieval Accuracy for Aerosol Optical Depth by Fusion of Modis and Caliop Data. Improv. Teh. Vjesn. 2017, 24, 3. [Google Scholar]
- Ahn, S.; Chung, S.R.; Oh, H.J.; Chung, C.Y. Composite Aerosol Optical Depth Mapping over Northeast Asia from GEO-LEO Satellite Observations. Remote Sens. 2021, 13, 1096. [Google Scholar] [CrossRef]
- Wang, Y.; Yuan, Q.; Li, T.; Shen, H.; Zheng, L.; Zhang, L. Large-scale MODIS AOD products recovery: Spatial-temporal hybrid fusion considering aerosol variation mitigation. ISPRS J. Photogramm. 2019, 157, 1–12. [Google Scholar] [CrossRef]
- Li, K.; Bai, K.; Li, Z.; Guo, J.; Chang, N.B. Synergistic data fusion of multimodal AOD and air quality data for near real-time full coverage air pollution assessment. J. Environ. Manag. 2022, 302, 114121. [Google Scholar] [CrossRef] [PubMed]
- Xiao, Q.; Wang, Y.; Chang, H.H.; Meng, X.; Geng, G.; Lyapustin, A.; Liu, Y. Fullcoverage high-resolution daily PM2.5 estimation using MAIAC AOD in the Yangtze River Delta of China. Remote Sens. Environ. 2017, 199, 437–446. [Google Scholar] [CrossRef]
- Zhang, R.; Di, B.; Luo, Y.; Deng, X.; Grieneisen, M.L.; Wang, Z.; Zhan, Y. A nonparametric approach to filling gaps in satellite-retrieved aerosol optical depth for estimating ambient PM2.5 levels. Environ. Pollut. 2018, 243, 998–1007. [Google Scholar] [CrossRef] [PubMed]
- Zhao, C.; Liu, Z.; Wang, Q.; Ban, J.; Chen, N.X.; Li, T. High-resolution daily AOD estimated to full coverage using the random forest model approach in the BeijingTianjin-Hebei region. Atmos. Environ. 2019, 203, 70–78. [Google Scholar] [CrossRef]
- Ali, A.; Amin, S.E.; Ramadan, H.H.; Tolba, M.F. Enhancement of OMI aerosol optical depth data assimilation using artificial neural network. Neural Comput. Appl. 2013, 23, 2267–2279. [Google Scholar] [CrossRef]
- Bi, J.; Belle, J.H.; Wang, Y.; Lyapustin, A.I.; Wildani, A.; Liu, Y. Impacts of snow and cloud covers on satellite-derived PM2.5 levels. Remote Sens. Environ. 2018, 221, 665–674. [Google Scholar] [CrossRef]
- Park, S.; Lee, J.; Im, J.; Song, C.K.; Choi, M.; Kim, J.; Lee, S.; Park, R.; Kim, S.M.; Yoon, J.; et al. Estimation of spatially continuous daytime particulate matter concentrations under all sky conditions through the synergistic use of satellite-based AOD and numerical models. Sci. Total Environ. 2020, 713, 136516. [Google Scholar] [CrossRef]
- Jiang, T.; Chen, B.; Nie, Z.; Ren, Z.; Xu, B.; Tang, S. Estimation of hourly full coverage PM2.5 concentrations at 1-km resolution in China using a two-stage random forest model. Atmos. Res. 2021, 248, 105146. [Google Scholar] [CrossRef]
- Lanzaco, B.L.; Olcese, L.E.; Palancar, G.G.; Toselli, B.M. A method to improve MODIS AOD values, Application to South America. Aerosol Air Qual. Res. 2016, 16, 1509–1522. [Google Scholar] [CrossRef] [Green Version]
- Li, L.; Franklin, M.; Girguis, M.; Lurmann, F.; Wu, J.; Pavlovic, N.; Breton, C.; Gilliland, F.; Habre, R. Spatiotemporal imputation of MAIAC AOD using deep learning with downscaling. Remote Sens. Environ. 2020, 237, 111584. [Google Scholar] [CrossRef]
- Chatterjee, A.; Michalak, A.M.; Kahn, R.A.; Paradise, S.R.; Braverman, A.J.; Miller, C.E. A geostatistical data fusion technique for merging remote sensing and ground-based observations of aerosol optical thickness. J. Geophys. Res. 2010, 115, D20207. [Google Scholar] [CrossRef] [Green Version]
- Xu, H.; Guang, J.; Xue, Y.; de Leeuw, G.; Che, Y.H.; Guo, J.; He, X.W.; Wang, T.K. A consistent aerosol optical depth (AOD) dataset over mainland China by integration of several AOD products. Atmos. Environ. 2015, 114, 48–56. [Google Scholar] [CrossRef]
- Yang, J.; Hu, M. Filling the missing data gaps of daily MODIS AOD using spatiotemporal interpolation. Sci. Total Environ. 2018, 633, 677–683. [Google Scholar] [CrossRef] [PubMed]
- Gupta, P.; Patadia, F.; Christopher, S.A. Multisensor data product fusion for aerosol research. IEEE Trans. Geosci. Remote Sens. 2008, 46, 1407–1415. [Google Scholar] [CrossRef]
- Wang, J.; Brown, D.G.; Hammerling, D. Geostatistical inverse modeling for super-resolution mapping of continuous spatial processes. Remote Sens. Environ. 2013, 139, 205–215. [Google Scholar] [CrossRef]
- Nguyen, H.; Cressie, N.; Braverman, A. Spatial statistical data fusion for remote sensing applications. J. Am. Stat. Assoc. 2012, 107, 1004–1018. [Google Scholar] [CrossRef]
- Puttaswamy, S.J.; Nguyen, H.M.; Braverman, A.; Hu, X.; Liu, Y. Statistical data fusion of multi-sensor AOD over the continental United States. Geocarto Int. 2013, 29, 48–64. [Google Scholar] [CrossRef]
- Kokhanovsky, A.A.; Breon, F.M.; Cacciari, A.; Carboni, E.; Diner, D.; Di Nicolantonio, W.; von Hoyningen-Huene, W. Aerosol remote sensing over land: A comparison of satellite retrievals using different algorithms and instruments. Atmos. Res. 2007, 85, 372–394. [Google Scholar] [CrossRef]
- Tang, Q.; Bo, Y.; Zhu, Y. Spatiotemporal fusion of multiple-satellite aerosol optical depth (AOD) products using Bayesian maximum entropy method. J. Geophys. Res. Atmos. 2016, 121, 4034–4048. [Google Scholar] [CrossRef] [Green Version]
- CALIPSO Low Laser Energy Technical Advisory for Data Users. Available online: https://www-calipso.larc.nasa.gov/resources/calipso_users_guide/advisory/advisory_2018-10-10-CALIPSO_Laser_Energy_Technical_Advisory_Ver03 (accessed on 20 March 2022).
- Campbell, J.R.; Tackett, J.L.; Reid, J.S.; Zhang, J.; Curtis, C.A.; Hyer, E.J.; Winker, D.M. Evaluating nighttime CALIOP 0.532 μm aerosol optical depth and extinction coefficient retrievals. Atmos. Meas. Tech. 2012, 5, 2143–2160. [Google Scholar] [CrossRef] [Green Version]
- Vaughan, M.A.; Powell, K.A.; Winker, D.M.; Hostetler, C.A.; Kuehn, R.E.; Hunt, W.H.; McGill, M.J. Fully automated detection of cloud and aerosol layers in the CALIPSO lidar measurements. J. Atmos. Ocean. Tech. 2009, 26, 2034–2050. [Google Scholar] [CrossRef]
- Liu, Z.; Winker, D.; Omar, A.; Vaughan, M.; Trepte, C.; Hu, Y.; Lin, B. Effective lidar ratios of dense dust layers over North Africa derived from the CALIOP measurements. J. Quant. Spectrosc. Ra. 2011, 112, 204–213. [Google Scholar] [CrossRef]
- Eck, T.F.; Holben, B.N.; Reid, J.S.; Dubovik, O.; Smirnov, A.; O’neill, N.T.; Kinne, S. Wavelength dependence of the optical depth of biomass burning, urban, and desert dust aerosols. J. Geophys. Res. Atmos. 1999, 104, 31333–31349. [Google Scholar] [CrossRef]
- Smirnov, A.; Holben, B.N.; Slutsker, I.; Giles, D.M.; McClain, C.R.; Eck, T.F.; Jourdin, F. Maritime aerosol network as a component of aerosol robotic network. J. Geophys. Res. Atmos. 2009, 114, D6. [Google Scholar] [CrossRef] [Green Version]
- Omar, A.H.; Winker, D.M.; Tackett, J.L.; Giles, D.M.; Kar, J.; Liu, Z.; Trepte, C.R. CALIOP and AERONET aerosol optical depth comparisons: One size fits none. J. Geophys. Res. Atmos. 2013, 118, 4748–4766. [Google Scholar] [CrossRef]
- Akita, Y.; Chen, J.C.; Serre, M.L. The moving-window Bayesian maximum entropy framework: Estimation of PM (2.5) yearly average concentration across the contiguous United States. J. Exposure Sci. Environ. Epidemiol. 2012, 22, 496–501. [Google Scholar] [CrossRef] [Green Version]
- Christakos, G.; Li, X. Bayesian maximum entropy analysis and mapping: A farewell to kriging estimators? Math. Geol. 1998, 30, 435–462. [Google Scholar] [CrossRef]
- Nazelle, A.D.; Arunachalam, S.; Serre, M.L. Bayesian maximum entropy integration of ozone observations and model predictions: An application for attainment demonstration in North Carolina. Environ. Sci. Technol. 2010, 44, 5707–5713. [Google Scholar] [CrossRef] [Green Version]
- Jaynes, E.T. Information theory and statistical mechanics. Phys. Rev. 1957, 106, 620–630. [Google Scholar] [CrossRef]
- Jaynes, E.T. Notes on Present Status and Future Prospects. In Fundamental Theories of Physics; Springer: Dordrecht, The Netherlands, 1990; pp. 1–13. [Google Scholar]
- Holben, B.N.; Eck, T.F.; Slutsker, I.A.; Tanre, D.; Buis, J.P.; Setzer, A.; Smirnov, A. AERONET—A federated instrument network and data archive for aerosol characterization. Remote Sens. Environ. 1998, 66, 1–16. [Google Scholar] [CrossRef]
- Spadavecchia, L.; Williams, M. Can spatio-temporal geostatistical methods improve high resolution regionalisation of meteorological variables? Agricult. Forest Meteorol. 2009, 149, 1105–1117. [Google Scholar] [CrossRef]
- Bilal, M.; Nichol, J.E. Evaluation of MODIS aerosol retrieval algorithms over the Beijing-Tianjin-Hebei region during low to very high pollution events. J. Geophys. Res-Atmos. 2015, 120, 7941–7957. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.; Zhu, B.; Zhu, Z.; Zhang, T.; Gong, W.; Ji, Y.; Xia, X.; Wang, L.; Zhou, X.; Chen, X. Evaluation and comparison of MODIS collection 6.1 and collection 6 dark target aerosol optical depth over mainland China under various conditions including spatiotemporal distribution, haze effects, and underlying surface. Earth Space Sci. 2019, 6, 2575–2592. [Google Scholar] [CrossRef] [Green Version]
- Zhang, T.; Wang, L.; Zhao, B.; Gu, Y.; Wong, M.S.; She, L.; Xia, X.; Dong, J.; Ji, Y.; Gong, W.; et al. A Geometry-Discrete Minimum Reflectance Aerosol Retrieval Algorithm (GeoMRA) for Geostationary Meteorological Satellite Over Heterogeneous Surfaces. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–14. [Google Scholar] [CrossRef]
- Gong, W.; Huang, Y.; Zhang, T.; Zhu, Z.; Ji, Y.; Xiang, H. Impact and suggestion of column-to-surface vertical correction scheme on the relationship between satellite AOD and ground-level PM2. 5 in China. Remote Sens. 2017, 9, 1038. [Google Scholar] [CrossRef] [Green Version]
- Zhang, T.; Gong, W.; Zhu, Z.; Sun, K.; Huang, Y.; Ji, Y. Semi-physical estimates of national-scale PM10 concentrations in China using a satellite-based geographically weighted regression model. Atmosphere 2016, 7, 88. [Google Scholar] [CrossRef] [Green Version]
- Brooker, P.I. A parametric study of robustness of kriging variance as a function of range and relative nugget effect for a spherical semivariogram. Math. Geol. 1986, 18, 477–488. [Google Scholar] [CrossRef]
- Cressie, N.A.C. Statistics for Spatial Data; Wiley: New York, NY, USA, 1993. [Google Scholar]
- Genton, M.G.; Gorsich, D.J. Variogram model selection via nonparametric derivative estimation. Math. Geol. 2000, 32, 249–270. [Google Scholar] [CrossRef]
- Christakos, G. Modern Spatiotemporal Geostatistics; Oxford University Press: London, UK, 2000. [Google Scholar]
- Shi, T.; Han, Z.; Gong, W.; Ma, X.; Han, G. High-precision methodology for quantifying gas point source emission. J. Clean. Prod. 2021, 320, 128672. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite/Instrument | Product | Resolution | Collection/Version | |
|---|---|---|---|---|
| Spatial | Temporal | |||
| Himawari-8 AHI | Level 2 Aerosol Product | 5 km | 10 min | V3.0 |
| Level 2 Cloud Product | 5 km | 10 min | V1.0 | |
| Terra, Aqua-MODIS | MOD04_L2/MYD04_L2 | 10 km | daily | C6.1 |
| CALIPSO-CALIOP | CAL_LID_L2_05kmAPro | 5 km | daily | V4.20 |
| CAL_LID_L2_VFM | 5 km | daily | V4.20 | |
| AERONET | AERONET Level 2.0 | - | 15 min | V3 |
| MAN | Level 2.0 AOD | - | - | - |
| Type/Parameters | Covariance vs. Spatial Lag | Covariance vs. Temporal Lag | ||||
|---|---|---|---|---|---|---|
| R2 | RMB | RMSE | R2 | SSE | RMSE | |
| Exponential Model | 0.94 | 1.110 | 0.0015 | 0.90 | 1.112 | 0.0016 |
| Spherical Model | 0.91 | 1.117 | 0.0017 | 0.86 | 1.116 | 0.0016 |
| Gaussian Model | 0.92 | 1.116 | 0.0016 | 0.82 | 1.114 | 0.0017 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xia, X.; Zhang, T.; Wang, L.; Gong, W.; Zhu, Z.; Wang, W.; Gu, Y.; Lin, Y.; Zhou, X.; Dong, J.; et al. Spatial–Temporal Fusion of 10-Min Aerosol Optical Depth Products with the GEO–LEO Satellite Joint Observations. Remote Sens. 2023, 15, 2038. https://doi.org/10.3390/rs15082038
Xia X, Zhang T, Wang L, Gong W, Zhu Z, Wang W, Gu Y, Lin Y, Zhou X, Dong J, et al. Spatial–Temporal Fusion of 10-Min Aerosol Optical Depth Products with the GEO–LEO Satellite Joint Observations. Remote Sensing. 2023; 15(8):2038. https://doi.org/10.3390/rs15082038
Chicago/Turabian StyleXia, Xinghui, Tianhao Zhang, Lunche Wang, Wei Gong, Zhongmin Zhu, Wei Wang, Yu Gu, Yun Lin, Xiangyang Zhou, Jiadan Dong, and et al. 2023. "Spatial–Temporal Fusion of 10-Min Aerosol Optical Depth Products with the GEO–LEO Satellite Joint Observations" Remote Sensing 15, no. 8: 2038. https://doi.org/10.3390/rs15082038