
Stem Quality Estimates Using Terrestrial Laser Scanning Voxelized Data and a Voting-Based Branch Detection Algorithm

Abstract
:
1. Introduction
2. Materials and Methods
2.1. Field Data
2.2. Terrestrial Laser Scanning Data
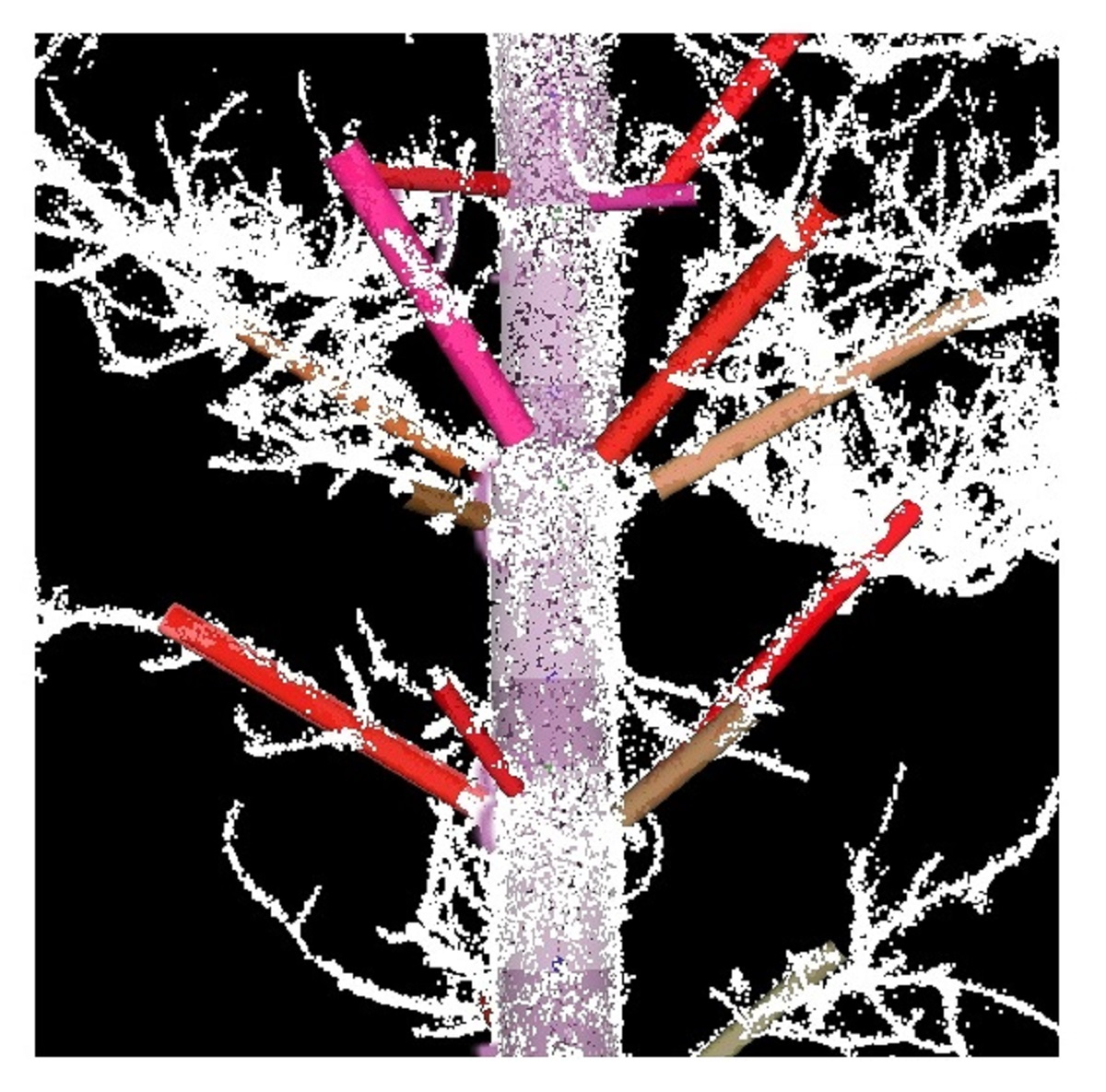
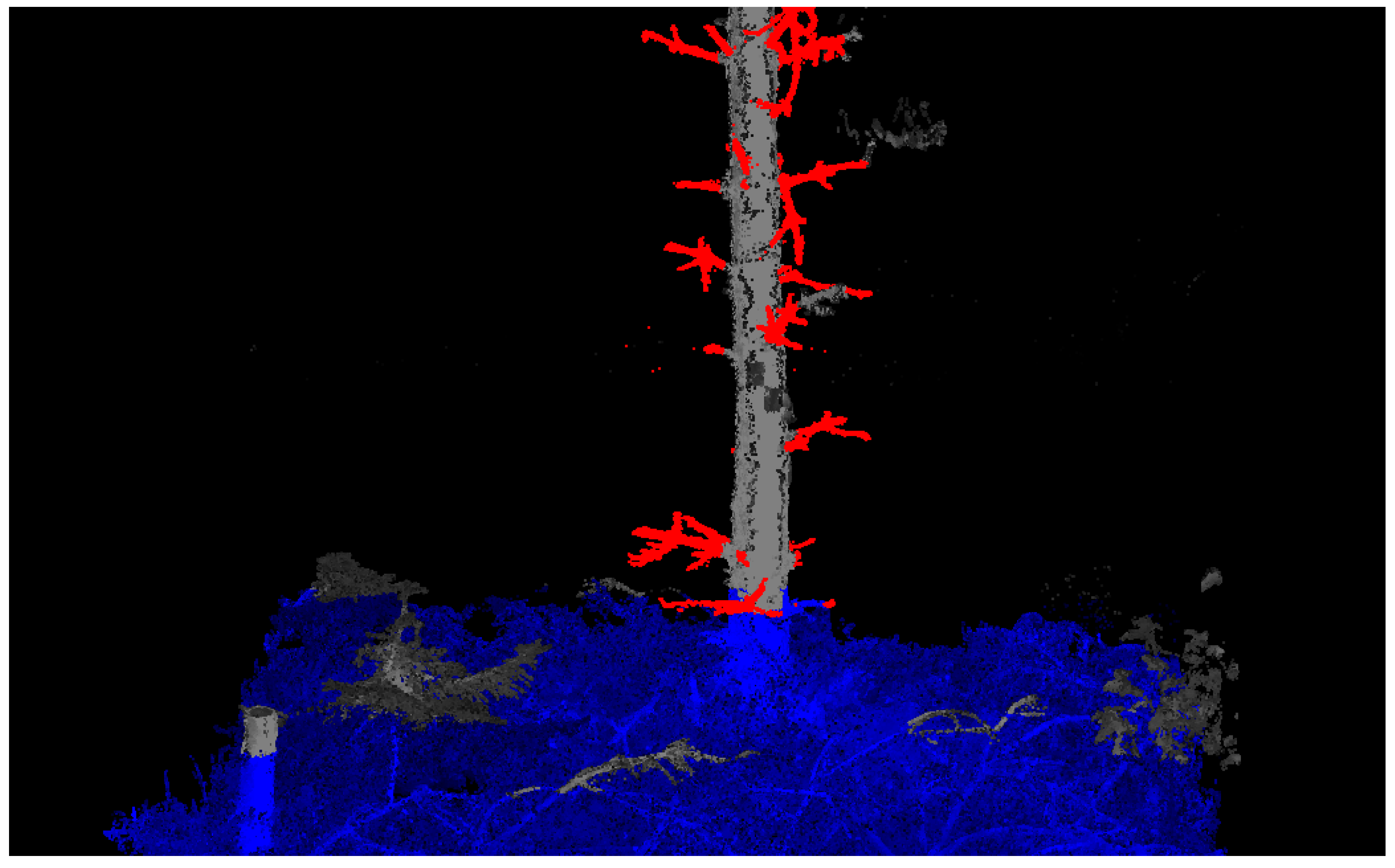
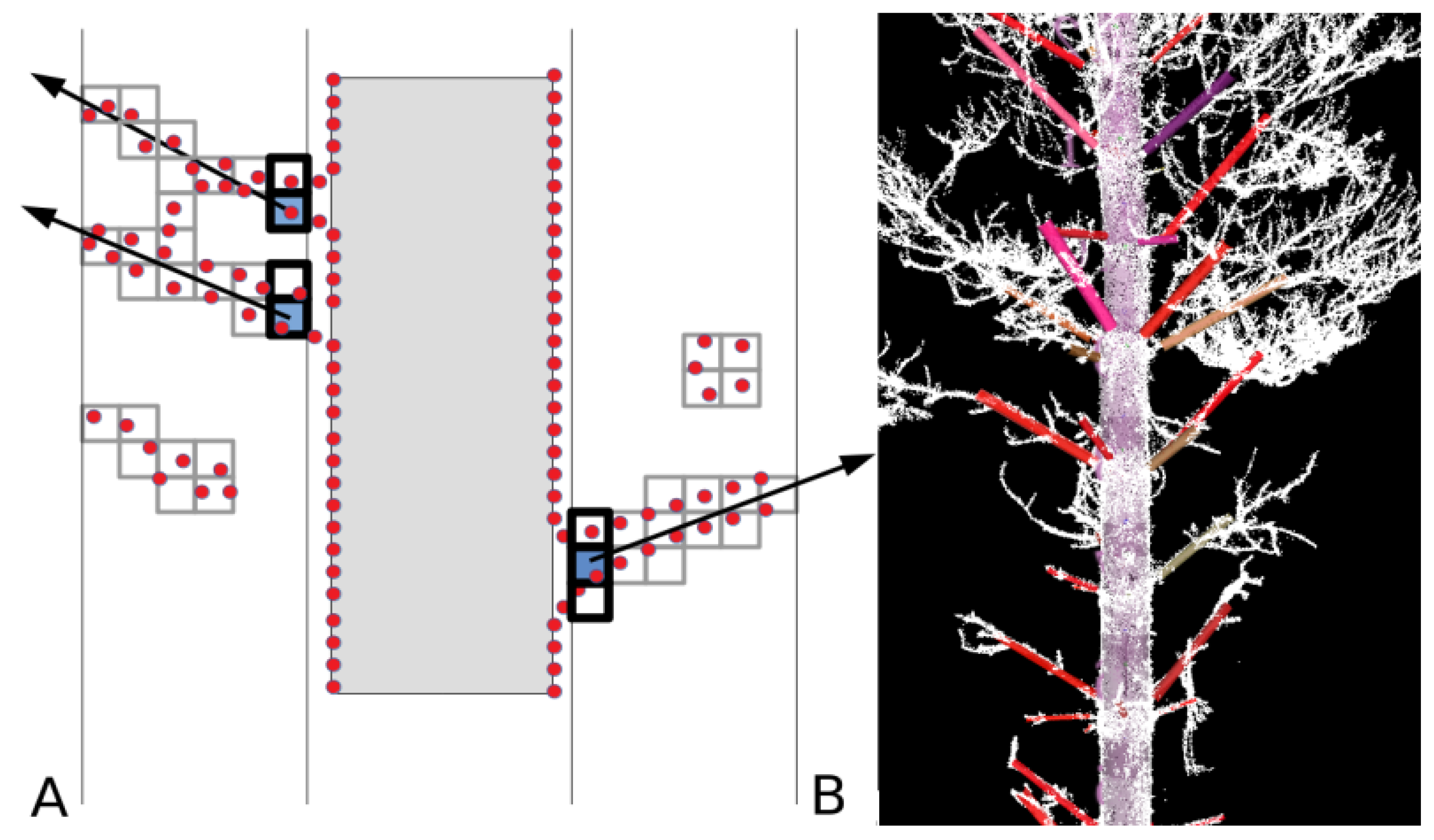
2.3. Branch Detection Algorithm
2.4. Data Processing
2.5. Evaluation
- = number of whorls
- = number of detected whorls
- = number of undetected whorls (omission errors)
- = number of false whorls (commission errors).
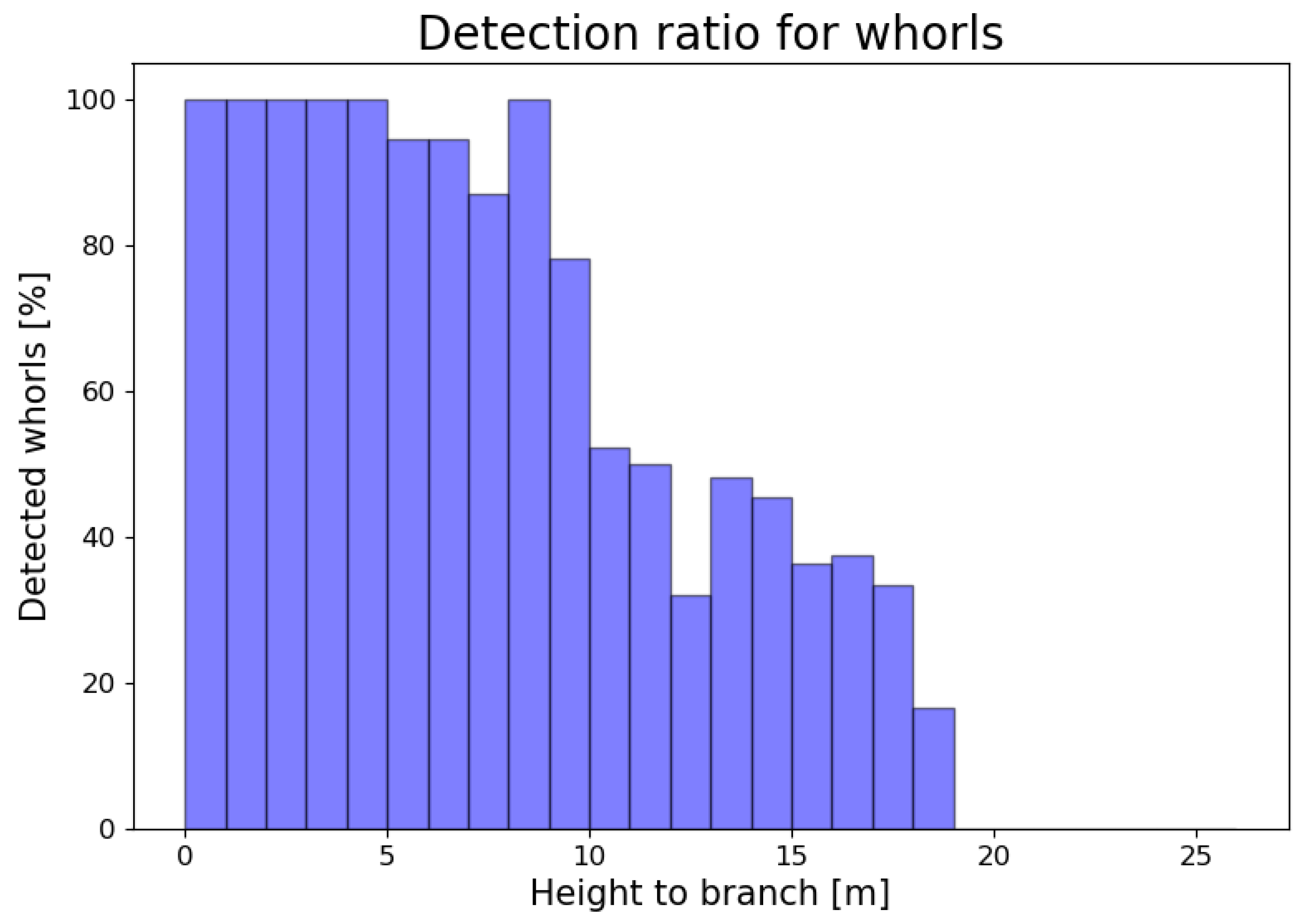
3. Results
4. Discussion
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Holopainen, M.; Vastaranta, M.; Hyyppä, J. Outlook for the Next Generation’s Precision Forestry in Finland. Forests 2014, 5, 1682–1694. [Google Scholar] [CrossRef] [Green Version]
- Hyyppä, J.; Hyyppä, H.; Leckie, D.; Gougeon, F.; Yu, X.; Maltamo, M. Review of methods of small–footprint airborne laser scanning for extracting forest inventory data in boreal forests. Int. J. Remote Sens. 2008, 29, 1339–1366. [Google Scholar] [CrossRef]
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrén, H.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Guan, F.; et al. Terrestrial laser scanning in forest inventories. ISPRS J. Photogramm. Remote Sens. 2016, 115, 63–77. [Google Scholar] [CrossRef]
- Pyörälä, J.; Liang, X.; Saarinen, N.; Kankare, V.; Wang, Y.; Holopainen, M.; Hyyppä, J.; Vastaranta, M. Assessing branching structure for biomass and wood quality estimation using terrestrial laser scanning point clouds. Can. J. Remote Sens. 2018, 44, 462–475. [Google Scholar] [CrossRef] [Green Version]
- Gorte, B.; Pfeifer, N. Structuring laser-scanned trees using 3D mathematical morphology. Int. Arch. Photogramm. Remote Sens. 2004, 35, 929–933. [Google Scholar]
- Cheng, Z.L.; Zhang, X.P.; Chen, B.Q. Reconstruction of Tree Branches from a Single Range Image. J. Comput. Sci. Technol. 2007, 22, 846–848. [Google Scholar] [CrossRef]
- Bucksch, A.; Lindenbergh, R. CAMPINO—A skeletonization method for point cloud processing. ISPRS J. Photogramm. Remote Sens. 2008, 63, 115–127. [Google Scholar] [CrossRef]
- Côté, J.F.; Widlowski, J.L.; Fournier, R.A.; Verstraete, M.M. The structural and radiative consistency of three-dimensional tree reconstructions from terrestrial lidar. Remote Sens. Environ. 2009, 113, 1067–1081. [Google Scholar] [CrossRef]
- Ai, M.; Yao, Q.; Wang, Y.; Wei, W. An Automatic Tree Skeleton Extraction Approach Based on Multi-View Slicing Using Terrestrial LiDAR Scans Data. Remote Sens. 2020, 12, 3824. [Google Scholar] [CrossRef]
- Chaudhury, A.; Godin, C. Skeletonization of Plant Point Cloud Data Using Stochastic Optimization Framework. Front. Plant Sci. 2020, 11, 773. [Google Scholar] [CrossRef]
- Raumonen, P.; Kaasalainen, M.; Åkerblom, M.; Kaasalainen, S.; Kaartinen, H.; Vastaranta, M.; Holopainen, M.; Disney, M.; Lewis, P. Fast Automatic Precision Tree Models from Terrestrial Laser Scanner Data. Remote Sens. 2013, 5, 491–520. [Google Scholar] [CrossRef] [Green Version]
- Lau, A.; Patrick Bentley, L.; Martius, C.; Shenkin, A.; Harm, B.; Raumonen, P.; Malhi, Y.; Jackson, T.; Herold, M. Quantifying branch architecture of tropical trees using terrestrial LiDAR and 3D modelling. Trees 2018, 32, 1219–1231. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Yang, G.; Jiang, Y.; Xu, B.; Li, X.; Zhu, Y.; Lei, L.; Chen, R.; Dong, Z.; Yang, H. Apple Tree Branch Information Extraction from Terrestrial Laser Scanning and Backpack-LiDAR. Remote Sens. 2020, 12, 3592. [Google Scholar] [CrossRef]
- Bremer, M.; Rutzinger, M.; Wichmann, V. Derivation of tree skeletons and error assessment using LiDAR point cloud data of varying quality. ISPRS J. Photogramm. Remote Sens. 2013, 80, 39–50. [Google Scholar] [CrossRef]
- Li, Y.; Su, Y.; Zhao, X.; Yang, M.; Hu, T.; Zhang, J.; Liu, J.; Liu, M.; Guo, Q. Retrieval of tree branch arhitecture attributes from terrestrial laser scan data using a Laplacian algorithm. Agric. For. Metrol. 2020, 284, 107874. [Google Scholar] [CrossRef]
- Hackenberg, J.; Morhart, C.; Sheppard, J.; Spiecker, H.; Disney, M. Highly Accurate Tree Models Derived from Terrestrial Laser Scan Data: A Method Description. Forests 2014, 5, 1069–1105. [Google Scholar] [CrossRef] [Green Version]
- Xi, Z.; Hopkinson, C.; Chasmer, L. Filtering Stems and Branches from Terrestrial Laser Scanning Point Clouds Using Deep 3D Fully Convolutional Networks. Remote Sens. 2018, 10, 1215. [Google Scholar] [CrossRef] [Green Version]
- Eysn, L.; Pfeifer, N.; Ressl, C.; Hollaus, M.; Grafl, A.; Morsdorf, F. A Practical Approach for Extracting Tree Models in Forest Environments Based on Equirectangular Projections of Terrestrial Laser Scans. Remote Sens. 2013, 5, 5424–5448. [Google Scholar] [CrossRef] [Green Version]
- Pyörälä, J.; Kankare, V.; Vastaranta, M.; Rikala, J.; Holopainen, M.; Sipi, M.; Hyyppä, J.; Uusitalo, J. Comparison of terrestrial laser scanning in measuring Scots Pine (Pinus sylvestris L.) branch structure. Scand. J. For. Res. 2018, 33, 291–298. [Google Scholar] [CrossRef] [Green Version]
- Dassot, M.; Colin, A.; Santenoise, P.; Fournier, M.; Constant, T. Terrestrial laser scanning for measuring the solid wood volume, including branches of adult standing treess in the forest environment. Comput. Electron. Agric. 2012, 89, 86–93. [Google Scholar] [CrossRef]
- Olofsson, K.; Holmgren, J. Single Tree Stem Profile Detection Using Terrestrial Laser Scanner Data, Flatness Saliency Features and Curvature Properties. Forests 2016, 7, 207. [Google Scholar] [CrossRef]
- Rocha, K.D.; Silva, C.A.; Cosenza, D.N.; Mohan, M.; Klauberg, C.; Schlickmann, M.B.; Xia, J.; Leite, R.V.; Alves de Almeida, D.R.; Atkins, J.W.; et al. Crown-Level Structure and Fuel Load Characterization from Airborne and Terrestrial Laser Scanning in a Longleaf Pine (Pinus palustris Mill.) Forest Ecosystem. Remote Sens. 2023, 15, 1002. [Google Scholar] [CrossRef]
- Olofsson, K.; Holmgren, J. Co-registration of single tree maps and data captured by a moving sensor using stem diameter weighted linking. Silva Fenn. 2022, 56, 10712. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tree | DBH [cm] | Height [m] | Height to First Green Branch [m] |
|---|---|---|---|
| 1 | 27.3 | 21.9 | 13.0 |
| 2 | 32.0 | 21.0 | 12.4 |
| 3 | 38.5 | 24.4 | 11.4 |
| 4 | 29.2 | 21.8 | 14.1 |
| 5 | 20.9 | 14.9 | 5.9 |
| 6 | 22.9 | 15.7 | 4.8 |
| 7 | 19.2 | 13.5 | 4.9 |
| 8 | 21.4 | 14.4 | 2.6 |
| 9 | 20.0 | 16.5 | 6.5 |
| 10 | 30.4 | 20.8 | 11.2 |
| Tree | Detected Whorls | All Whorls | Detection Rate [%] |
|---|---|---|---|
| 1 | 28 | 39 | 71.8 |
| 2 | 23 | 41 | 56.1 |
| 3 | 24 | 31 | 77.4 |
| 4 | 31 | 38 | 81.6 |
| 5 | 15 | 26 | 57.7 |
| 6 | 15 | 28 | 53.6 |
| 7 | 19 | 31 | 61.3 |
| 8 | 18 | 28 | 64.3 |
| 9 | 24 | 40 | 60.0 |
| 10 | 24 | 47 | 51.1 |
| all trees | 221 | 349 | 63.3 |
| all trees (branches < 10 m from ground) | 148 | 163 | 90.8 |
| Tree | [%] | (0–10 m) [%] | [%] | (0–10 m) [%] |
|---|---|---|---|---|
| 1 | 12.5 | 14.3 | 28.2 | 7.7 |
| 2 | 25.8 | 42.9 | 43.9 | 20.0 |
| 3 | 20.0 | 33.3 | 22.6 | 11.1 |
| 4 | 6.1 | 0.0 | 18.4 | 18.2 |
| 5 | 21.1 | 22.2 | 42.3 | 6.7 |
| 6 | 46.4 | 44.4 | 46.4 | 11.8 |
| 7 | 5.0 | 5.0 | 38.7 | 17.4 |
| 8 | 40.0 | 40.0 | 35.7 | 5.3 |
| 9 | 31.4 | 31.4 | 40.0 | 4.0 |
| 10 | 29.4 | 32.3 | 48.9 | 0.0 |
| all | 24.3 | 29.5 | 36.7 | 9.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Olofsson, K.; Holmgren, J. Stem Quality Estimates Using Terrestrial Laser Scanning Voxelized Data and a Voting-Based Branch Detection Algorithm. Remote Sens. 2023, 15, 2082. https://doi.org/10.3390/rs15082082
Olofsson K, Holmgren J. Stem Quality Estimates Using Terrestrial Laser Scanning Voxelized Data and a Voting-Based Branch Detection Algorithm. Remote Sensing. 2023; 15(8):2082. https://doi.org/10.3390/rs15082082
Chicago/Turabian StyleOlofsson, Kenneth, and Johan Holmgren. 2023. "Stem Quality Estimates Using Terrestrial Laser Scanning Voxelized Data and a Voting-Based Branch Detection Algorithm" Remote Sensing 15, no. 8: 2082. https://doi.org/10.3390/rs15082082
APA StyleOlofsson, K., & Holmgren, J. (2023). Stem Quality Estimates Using Terrestrial Laser Scanning Voxelized Data and a Voting-Based Branch Detection Algorithm. Remote Sensing, 15(8), 2082. https://doi.org/10.3390/rs15082082