
Assessing the Potential of UAV-Based Multispectral and Thermal Data to Estimate Soil Water Content Using Geophysical Methods

Abstract
:
1. Introduction
- How effectively can SWC be estimated using multispectral and thermal data acquired from a UAV when many SWC estimates are available for training?
- Which types of UAV-based data are most useful for estimating SWC?
- How does SWC sampling depth affect estimation from UAV-acquired data?
- Does the timing of data acquisition relative to precipitation affect the accuracy of SWC prediction?
- Are shallow SWC estimates more accurate when correlated with the UAV response from larger vegetation (grapevines) or shorter vegetation (mown grass)?
2. Materials and Methods
2.1. Study Area Description
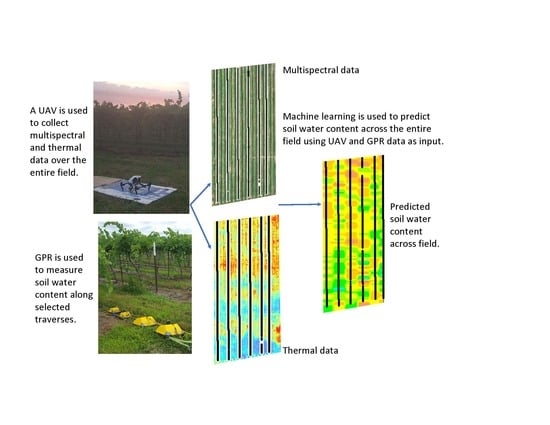
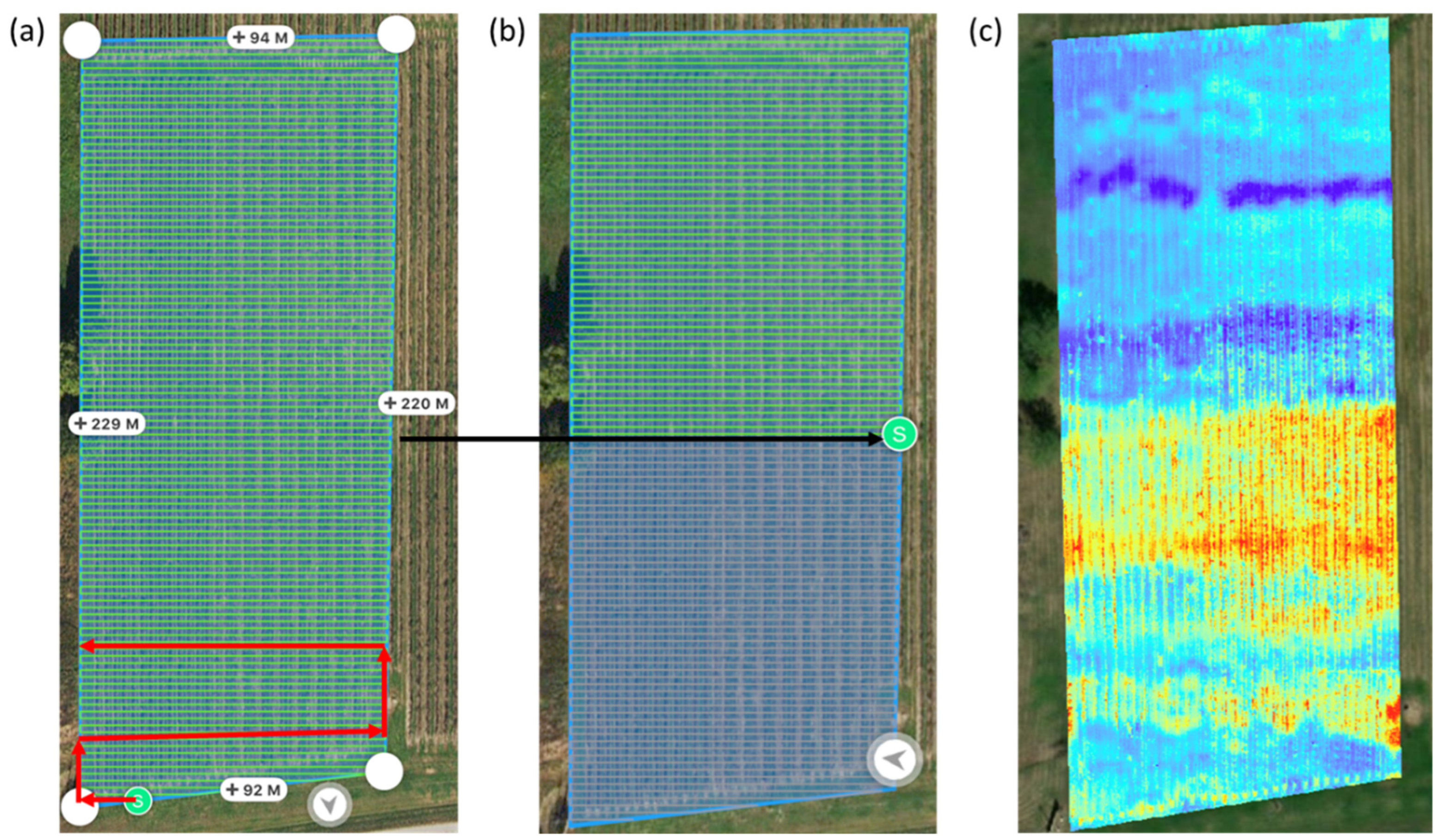
2.2. UAV Data Acquisition and Processing
2.2.1. Multispectral Data Acquisition and Processing
2.2.2. Thermal Data Acquisition and Processing
2.3. GPR Data Acquisition

2.4. Using Machine Learning to Correlate UAV-Based Data with SWC
3. Results
3.1. Soil Water Content
3.2. SWC Prediction Using Random Forest Method
3.2.1. Input Parameters
3.2.2. Sampling Depth
3.2.3. Soil Moisture/Precipitation
3.3. Impact of Short vs. Tall Vegetation on SWC Prediction
4. Discussion
4.1. Input Parameters
4.2. Sampling Depth
4.3. Average SWC/Precipitation
4.4. Impact of Short vs. Tall Vegetation on SWC Prediction
4.5. Other Factors
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bittelli, M. Measuring Soil Water Content: A Review. HortTechnology 2011, 21, 293–300. [Google Scholar] [CrossRef]
- Robinson, D.A. Field Estimation of Soil Water Content: A Practical Guide to Methods, Instrumentation and Sensor Technology. Soil Sci. Soc. Am. J. 2009, 73, 1437. [Google Scholar] [CrossRef]
- Robinson, D.A.; Campbell, C.S.; Hopmans, J.W.; Hornbuckle, B.K.; Jones, S.B.; Knight, R.; Ogden, F.; Selker, J.; Wendroth, O. Soil Moisture Measurement for Ecological and Hydrological Watershed-Scale Observatories: A Review. Vadose Zone J. 2008, 7, 358–389. [Google Scholar] [CrossRef]
- Walker, J.P.; Willgoose, G.R.; Kalma, J.D. In Situ Measurement of Soil Moisture: A Comparison of Techniques. J. Hydrol. 2004, 293, 85–99. [Google Scholar] [CrossRef]
- Palanisamy, S.; Selvaraj, R.; Ramesh, T.; Ponnusamy, J. Applications of Remote Sensing in Agriculture—A Review. Int. J. Curr. Microbiol. Appl. Sci. 2019, 8, 2270–2283. [Google Scholar] [CrossRef]
- Peng, J.; Loew, A.; Merlin, O.; Verhoest, N.E.C. A Review of Spatial Downscaling of Satellite Remotely Sensed Soil Moisture. Rev. Geophys. 2017, 55, 341–366. [Google Scholar] [CrossRef]
- Jiang, Y.; Lu, Z.; Li, S.; Lei, Y.; Chu, Q.; Yin, X.; Chen, F. Large-Scale and High-Resolution Crop Mapping in China Using Sentinel-2 Satellite Imagery. Agriculture 2020, 10, 433. [Google Scholar] [CrossRef]
- Karlson, M.; Bayala, J.; Ouedraogo, A.; Soro, B.; Knorring, H.; Reese, H.; Ostwald, M. The Potential of Sentinel-2 for Crop Production Estimation in a Smallholder Agroforestry Landscape, Burkina Faso. Front. Environ. Sci. 2020, 8, 85. [Google Scholar] [CrossRef]
- López-Andreu, F.J.; Erena, M.; Dominguez-Gómez, J.A.; López-Morales, J.A. Sentinel-2 Images and Machine Learning as Tool for Monitoring of the Common Agricultural Policy: Calasparra Rice as a Case Study. Agronomy 2021, 11, 621. [Google Scholar] [CrossRef]
- Segarra, J.; Buchaillot, M.L.; Araus, J.L.; Kefauver, S.C. Remote Sensing for Precision Agriculture: Sentinel-2 Improved Features and Applications. Agronomy 2020, 10, 641. [Google Scholar] [CrossRef]
- Berni, J.A.J.; Zarco-Tejada, P.J.; Suarez, L.; Fereres, E. Thermal and Narrowband Multispectral Remote Sensing for Vegetation Monitoring From an Unmanned Aerial Vehicle. IEEE Trans. Geosci. Remote Sens. 2009, 47, 722–738. [Google Scholar] [CrossRef]
- Bian, Z.; Roujean, J.-L.; Cao, B.; Du, Y.; Li, H.; Gamet, P.; Fang, J.; Xiao, Q.; Liu, Q. Modeling the Directional Anisotropy of Fine-Scale TIR Emissions over Tree and Crop Canopies Based on UAV Measurements. Remote Sens. Environ. 2021, 252, 112150. [Google Scholar] [CrossRef]
- Ma, Y.; Chen, H.; Zhao, G.; Wang, Z.; Wang, D. Spectral Index Fusion for Salinized Soil Salinity Inversion Using Sentinel-2A and UAV Images in a Coastal Area. IEEE Access 2020, 8, 159595–159608. [Google Scholar] [CrossRef]
- dos Santos, L.M.; de Souza Barbosa, B.D.; Diotto, A.V.; Andrade, M.T.; Conti, L.; Rossi, G. Determining the Leaf Area Index and Percentage of Area Covered by Coffee Crops Using UAV RGB Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 6401–6409. [Google Scholar] [CrossRef]
- Sankey, J.B.; Sankey, T.T.; Li, J.; Ravi, S.; Wang, G.; Caster, J.; Kasprak, A. Quantifying Plant-Soil-Nutrient Dynamics in Rangelands: Fusion of UAV Hyperspectral-LiDAR, UAV Multispectral-Photogrammetry, and Ground-Based LiDAR-Digital Photography in a Shrub-Encroached Desert Grassland. Remote Sens. Environ. 2021, 253, 112223. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; González-Dugo, V.; Berni, J.A.J. Fluorescence, Temperature and Narrow-Band Indices Acquired from a UAV Platform for Water Stress Detection Using a Micro-Hyperspectral Imager and a Thermal Camera. Remote Sens. Environ. 2012, 117, 322–337. [Google Scholar] [CrossRef]
- Reichle, R.H.; Liu, Q.; Koster, R.D.; Crow, W.T.; De Lannoy, G.J.M.; Kimball, J.S.; Ardizzone, J.V.; Bosch, D.; Colliander, A.; Cosh, M.; et al. Version 4 of the SMAP Level-4 Soil Moisture Algorithm and Data Product. J. Adv. Model. Earth Syst. 2019, 11, 3106–3130. [Google Scholar] [CrossRef]
- Zhao, B.; Dai, Q.; Zhuo, L.; Zhu, S.; Shen, Q.; Han, D. Assessing the Potential of Different Satellite Soil Moisture Products in Landslide Hazard Assessment. Remote Sens. Environ. 2021, 264, 112583. [Google Scholar] [CrossRef]
- Crow, W.T.; Berg, A.A.; Cosh, M.H.; Loew, A.; Mohanty, B.P.; Panciera, R.; de Rosnay, P.; Ryu, D.; Walker, J.P. Upscaling Sparse Ground-Based Soil Moisture Observations for the Validation of Coarse-Resolution Satellite Soil Moisture Products. Rev. Geophys. 2012, 50. [Google Scholar] [CrossRef]
- Inoue, Y. Satellite- and Drone-Based Remote Sensing of Crops and Soils for Smart Farming—A Review. Soil Sci. Plant Nutr. 2020, 66, 798–810. [Google Scholar] [CrossRef]
- Martínez-Fernández, J.; González-Zamora, A.; Sánchez, N.; Gumuzzio, A.; Herrero-Jiménez, C.M. Satellite Soil Moisture for Agricultural Drought Monitoring: Assessment of the SMOS Derived Soil Water Deficit Index. Remote Sens. Environ. 2016, 177, 277–286. [Google Scholar] [CrossRef]
- Babaeian, E.; Paheding, S.; Siddique, N.; Devabhaktuni, V.K.; Tuller, M. Estimation of Root Zone Soil Moisture from Ground and Remotely Sensed Soil Information with Multisensor Data Fusion and Automated Machine Learning. Remote Sens. Environ. 2021, 260, 112434. [Google Scholar] [CrossRef]
- Grote, K.; Crist, T.; Nickel, C. Experimental Estimation of the GPR Groundwave Sampling Depth. Water Resour. Res. 2010, 46, 8403. [Google Scholar] [CrossRef]
- Robinson, D.A.; Abdu, H.; Lebron, I.; Jones, S.B. Imaging of Hill-Slope Soil Moisture Wetting Patterns in a Semi-Arid Oak Savanna Catchment Using Time-Lapse Electromagnetic Induction. J. Hydrol. 2012, 416–417, 39–49. [Google Scholar] [CrossRef]
- Shanahan, P.W.; Binley, A.; Whalley, W.R.; Watts, C.W. The Use of Electromagnetic Induction to Monitor Changes in Soil Moisture Profiles beneath Different Wheat Genotypes. Soil Sci. Soc. Am. J. 2015, 79, 459–466. [Google Scholar] [CrossRef]
- Stanley, J.N.; Lamb, D.W.; Irvine, S.E.; Schneider, D.A. Effect of Aluminum Neutron Probe Access Tubes on the Apparent Electrical Conductivity Recorded by an Electromagnetic Soil Survey Sensor. IEEE Geosci. Remote Sens. Lett. 2014, 11, 333–336. [Google Scholar] [CrossRef]
- Toy, C.W.; Steelman, C.M.; Endres, A.L. Comparing Electromagnetic Induction and Ground Penetrating Radar Techniques for Estimating Soil Moisture Content. In Proceedings of the XIII Internarional Conference on Ground Penetrating Radar, Lecce, Italy, 21–25 June 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Wu, X.; Walker, J.P.; Jonard, F.; Ye, N. Inter-Comparison of Proximal Near-Surface Soil Moisture Measurement Techniques. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 2370–2378. [Google Scholar] [CrossRef]
- Hu, J.; Zhang, Y.; Zhao, D.; Yang, G.; Chen, F.; Zhou, C.; Chen, W. A Robust Deep Learning Approach for the Quantitative Characterization and Clustering of Peach Tree Crowns Based on UAV Images. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–13. [Google Scholar] [CrossRef]
- Jiang, P.; Zhou, X.; Liu, T.; Guo, X.; Ma, D.; Zhang, C.; Li, Y.; Liu, S. Prediction Dynamics in Cotton Aphid Using Unmanned Aerial Vehicle Multispectral Images and Vegetation Indices. IEEE Access 2023, 11, 5908–5918. [Google Scholar] [CrossRef]
- Maimaitijiang, M.; Sagan, V.; Sidike, P.; Hartling, S.; Esposito, F.; Fritschi, F.B. Soybean Yield Prediction from UAV Using Multimodal Data Fusion and Deep Learning. Remote Sens. Environ. 2020, 237, 111599. [Google Scholar] [CrossRef]
- Yang, S.; Hu, L.; Wu, H.; Ren, H.; Qiao, H.; Li, P.; Fan, W. Integration of Crop Growth Model and Random Forest for Winter Wheat Yield Estimation From UAV Hyperspectral Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 6253–6269. [Google Scholar] [CrossRef]
- Cuaran, J.; Leon, J. Crop monitoring using unmanned aerial vehicles: A review. Agric. Rev. 2021, 42, 121–132. [Google Scholar] [CrossRef]
- Matese, A.; Di Gennaro, S.F. Practical Applications of a Multisensor UAV Platform Based on Multispectral, Thermal and RGB High Resolution Images in Precision Viticulture. Agriculture 2018, 8, 116. [Google Scholar] [CrossRef]
- Quebrajo, L.; Perez-Ruiz, M.; Pérez-Urrestarazu, L.; Martínez, G.; Egea, G. Linking Thermal Imaging and Soil Remote Sensing to Enhance Irrigation Management of Sugar Beet. Biosyst. Eng. 2018, 165, 77–87. [Google Scholar] [CrossRef]
- Sagan, V.; Maimaitijiang, M.; Sidike, P.; Maimaitiyiming, M.; Erkbol, H.; Hartling, S.; Peterson, K.; Peterson II, J.; Burken, J.; Fritschi, F. UAV/Satellite Multiscale Data Fusion for Crop Monitoring and Early Stress Detection. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W13, 715–722. [Google Scholar] [CrossRef]
- Santesteban, L.G.; Di Gennaro, S.F.; Herrero-Langreo, A.; Miranda, C.; Royo, J.B.; Matese, A. High-Resolution UAV-Based Thermal Imaging to Estimate the Instantaneous and Seasonal Variability of Plant Water Status within a Vineyard. Agric. Water Manag. 2017, 183, 49–59. [Google Scholar] [CrossRef]
- Baluja, J.; Diago, M.P.; Balda, P.; Zorer, R.; Meggio, F.; Morales, F.; Tardaguila, J. Assessment of Vineyard Water Status Variability by Thermal and Multispectral Imagery Using an Unmanned Aerial Vehicle (UAV). Irrig. Sci. 2012, 30, 511–522. [Google Scholar] [CrossRef]
- Bellvert, J.; Zarco-Tejada, P.J.; Girona, J.; Fereres, E. Mapping Crop Water Stress Index in a ‘Pinot-Noir’ Vineyard: Comparing Ground Measurements with Thermal Remote Sensing Imagery from an Unmanned Aerial Vehicle. Precis. Agric. 2014, 15, 361–376. [Google Scholar] [CrossRef]
- Pádua, L.; Marques, P.; Adão, T.; Guimarães, N.; Sousa, A.; Peres, E.; Sousa, J.J. Vineyard Variability Analysis through UAV-Based Vigour Maps to Assess Climate Change Impacts. Agronomy 2019, 9, 581. [Google Scholar] [CrossRef]
- Gil-Docampo, M.; Ortiz-Sanz, J.; Martínez-Rodriguez, S.; Marcos-Robles, J.; Arza-García, M.; Sánchez-Sastre, L. Plant survival monitoring with UAVs and multispectral data in difficult access afforested areas. Geocarto Int. 2020, 35, 128–140. [Google Scholar] [CrossRef]
- Johnstone, D.; Moore, G.; Tausz, M.; Nicolas, M. The measurement of plant vitality in landscape trees. Arboric. J. 2013, 35, 18–27. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; Watson, C. Development of an Unmanned Aerial Vehicle (UAV) for Hyper-Resolution Vineyard Mapping Based on Visible, Multispectral and Thermal Imagery. In Proceedings of the 34th International Symposium on Remote Sensing of Environment, Sydney, Australia, 10–15 April 2011. [Google Scholar]
- Marques Ramos, A.P.; Prado Osco, L.; Elis Garcia Furuya, D.; Nunes Gonçalves, W.; Cordeiro Santana, D.; Pereira Ribeiro Teodoro, L.; Antonio da Silva Junior, C.; Fernando Capristo-Silva, G.; Li, J.; Henrique Rojo Baio, F.; et al. A Random Forest Ranking Approach to Predict Yield in Maize with Uav-Based Vegetation Spectral Indices. Comput. Electron. Agric. 2020, 178, 105791. [Google Scholar] [CrossRef]
- Olson, D.; Chatterjee, A.; Franzen, D.W.; Day, S.S. Relationship of Drone-Based Vegetation Indices with Corn and Sugarbeet Yields. Agron. J. 2019, 111, 2545–2557. [Google Scholar] [CrossRef]
- Wan, L.; Cen, H.; Zhu, J.; Zhang, J.; Zhu, Y.; Sun, D.; Du, X.; Zhai, L.; Weng, H.; Li, Y.; et al. Grain Yield Prediction of Rice Using Multi-Temporal UAV-Based RGB and Multispectral Images and Model Transfer—A Case Study of Small Farmlands in the South of China. Agric. For. Meteorol. 2020, 291, 108096. [Google Scholar] [CrossRef]
- Zhou, X.; Zheng, H.B.; Xu, X.Q.; He, J.Y.; Ge, X.K.; Yao, X.; Cheng, T.; Zhu, Y.; Cao, W.X.; Tian, Y.C. Predicting Grain Yield in Rice Using Multi-Temporal Vegetation Indices from UAV-Based Multispectral and Digital Imagery. ISPRS J. Photogramm. Remote Sens. 2017, 130, 246–255. [Google Scholar] [CrossRef]
- Figueiredo Moura da Silva, E.H.; Silva Antolin, L.A.; Zanon, A.J.; Soares Andrade, A.; Antunes de Souza, H.; dos Santos Carvalho, K.; Aparecido Vieira, N.; Marin, F.R. Impact Assessment of Soybean Yield and Water Productivity in Brazil Due to Climate Change. Eur. J. Agron. 2021, 129, 126329. [Google Scholar] [CrossRef]
- Yu, N.; Li, L.; Schmitz, N.; Tian, L.F.; Greenberg, J.A.; Diers, B.W. Development of Methods to Improve Soybean Yield Estimation and Predict Plant Maturity with an Unmanned Aerial Vehicle Based Platform. Remote Sens. Environ. 2016, 187, 91–101. [Google Scholar] [CrossRef]
- Bian, C.; Shi, H.; Wu, S.; Zhang, K.; Wei, M.; Zhao, Y.; Sun, Y.; Zhuang, H.; Zhang, X.; Chen, S. Prediction of Field-Scale Wheat Yield Using Machine Learning Method and Multi-Spectral UAV Data. Remote Sens. 2022, 14, 1474. [Google Scholar] [CrossRef]
- Fei, S.; Hassan, M.A.; He, Z.; Chen, Z.; Shu, M.; Wang, J.; Li, C.; Xiao, Y. Assessment of Ensemble Learning to Predict Wheat Grain Yield Based on UAV-Multispectral Reflectance. Remote Sens. 2021, 13, 2338. [Google Scholar] [CrossRef]
- Hassan, M.A.; Yang, M.; Rasheed, A.; Yang, G.; Reynolds, M.; Xia, X.; Xiao, Y.; He, Z. A Rapid Monitoring of NDVI across the Wheat Growth Cycle for Grain Yield Prediction Using a Multi-Spectral UAV Platform. Plant Sci. 2019, 282, 95–103. [Google Scholar] [CrossRef]
- Aboutalebi, M.; Allen, N.; Torres-Rua, A.F.; McKee, M.; Coopmans, C. Estimation of Soil Moisture at Different Soil Levels Using Machine Learning Techniques and Unmanned Aerial Vehicle (UAV) Multispectral Imagery. In Autonomous Air and Ground Sensing Systems for Agricultural Optimization and Phenotyping IV; Thomasson, J.A., McKee, M., Moorhead, R.J., Eds.; SPIE: Baltimore, MD, USA, 2019; p. 26. [Google Scholar] [CrossRef]
- Cheng, M.; Jiao, X.; Liu, Y.; Shao, M.; Yu, X.; Bai, Y.; Wang, Z.; Wang, S.; Tuohuti, N.; Liu, S.; et al. Estimation of Soil Moisture Content under High Maize Canopy Coverage from UAV Multimodal Data and Machine Learning. Agric. Water Manag. 2022, 264, 107530. [Google Scholar] [CrossRef]
- Li, W.; Liu, C.; Yang, Y.; Awais, M.; Li, W.; Ying, P.; Ru, W.; Cheema, M.J.M. A UAV-Aided Prediction System of Soil Moisture Content Relying on Thermal Infrared Remote Sensing. Int. J. Environ. Sci. Technol. 2022, 19, 9587–9600. [Google Scholar] [CrossRef]
- Ivushkin, K.; Bartholomeus, H.; Bregt, A.K.; Pulatov, A.; Franceschini, M.H.D.; Kramer, H.; van Loo, E.N.; Jaramillo Roman, V.; Finkers, R. UAV Based Soil Salinity Assessment of Cropland. Geoderma 2019, 338, 502–512. [Google Scholar] [CrossRef]
- Ge, X.; Wang, J.; Ding, J.; Cao, X.; Zhang, Z.; Liu, J.; Li, X. Combining UAV-Based Hyperspectral Imagery and Machine Learning Algorithms for Soil Moisture Content Monitoring. PeerJ 2019, 7, e6926. [Google Scholar] [CrossRef] [PubMed]
- Gu, H.; Lin, Z.; Guo, W.; Deb, S. Retrieving Surface Soil Water Content Using a Soil Texture Adjusted Vegetation Index and Unmanned Aerial System Images. Remote Sens. 2021, 13, 145. [Google Scholar] [CrossRef]
- Hassan-Esfahani, L.; Torres-Rua, A.; Jensen, A.; McKee, M. Assessment of Surface Soil Moisture Using High-Resolution Multi-Spectral Imagery and Artificial Neural Networks. Remote Sens. 2015, 7, 2627–2646. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Gritz, Y.; Merzlyak, M.N. Relationships between Leaf Chlorophyll Content and Spectral Reflectance and Algorithms for Non-Destructive Chlorophyll Assessment in Higher Plant Leaves. J. Plant Physiol. 2003, 160, 271–282. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Viña, A.; Ciganda, V.; Rundquist, D.C.; Arkebauer, T.J. Remote Estimation of Canopy Chlorophyll Content in Crops. Geophys. Res. Lett. 2005, 32. [Google Scholar] [CrossRef]
- Louhaichi, M.; Borman, M.M.; Johnson, D.E. Spatially Located Platform and Aerial Photography for Documentation of Grazing Impacts on Wheat. Geocarto Int. 2001, 16, 65–70. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Merzlyak, M.N. Remote Sensing of Chlorophyll Concentration in Higher Plant Leaves. Adv. Space Res. 1998, 22, 689–692. [Google Scholar] [CrossRef]
- Tucker, C.J. Red and Photographic Infrared Linear Combinations for Monitoring Vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef]
- Bendig, J.; Yu, K.; Aasen, H.; Bolten, A.; Bennertz, S.; Broscheit, J.; Gnyp, M.L.; Bareth, G. Combining UAV-Based Plant Height from Crop Surface Models, Visible, and near Infrared Vegetation Indices for Biomass Monitoring in Barley. Int. J. Appl. Earth Obs. Geoinf. 2015, 39, 79–87. [Google Scholar] [CrossRef]
- Tang, T.; Radomski, M.; Stefan, M.; Perrelli, M.; Fan, H. UAV-Based High Spatial and Temporal Resolution Monitoring and Mapping of Surface Moisture Status in a Vineyard. Pap. Appl. Geogr. 2020, 6, 402–415. [Google Scholar] [CrossRef]
- Barnes, E.; Clarke, T.R.; Richards, S.E.; Colaizzi, P.; Haberland, J.; Kostrzewski, M.; Waller, P.; Choi, C.; Riley, E.; Thompson, T.L. Coincident Detection of Crop Water Stress, Nitrogen Status, and Canopy Density Using Ground Based Multispectral Data. In Proceedings of the Fifth International Conference on Precision Agriculture, Bloomington, MN, USA, 16–19 July 2000. [Google Scholar]
- Rouse, J.W.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring Vegetation Systems in the Great Plains with ERTS. NASA Spec. Publ. 1974, 351, 309. [Google Scholar]
- Gitelson, A.A.; Stark, R.; Grits, U.; Rundquist, D.; Kaufman, Y.; Derry, D. Vegetation and Soil Lines in Visible Spectral Space: A Concept and Technique for Remote Estimation of Vegetation Fraction. Int. J. Remote Sens. 2002, 23, 2537–2562. [Google Scholar] [CrossRef]
- Elsayed, S.; Rischbeck, P.; Schmidhalter, U. Comparing the Performance of Active and Passive Reflectance Sensors to Assess the Normalized Relative Canopy Temperature and Grain Yield of Drought-Stressed Barley Cultivars. Field Crops Res. 2015, 177, 148–160. [Google Scholar] [CrossRef]
- Galagedara, L.W.; Parkin, G.W.; Redman, J.D.; von Bertoldi, P.; Endres, A.L. Field Studies of the GPR Ground Wave Method for Estimating Soil Water Content during Irrigation and Drainage. J. Hydrol. 2005, 301, 182–197. [Google Scholar] [CrossRef]
- Galagedara, L.W.; Parkin, G.W.; Redman, J.D. An Analysis of the Ground-Penetrating Radar Direct Ground Wave Method for Soil Water Content Measurement. Hydrol. Process. 2003, 17, 3615–3628. [Google Scholar] [CrossRef]
- Grote, K.; Hubbard, S.; Rubin, Y. Field-Scale Estimation of Volumetric Water Content Using Ground-Penetrating Radar Ground Wave Techniques. Water Resour. Res. 2003, 39. [Google Scholar] [CrossRef]
- Huisman, J.A.; Sperl, C.; Bouten, W.; Verstraten, J.M. Soil Water Content Measurements at Different Scales: Accuracy of Time Domain Reflectometry and Ground-Penetrating Radar. J. Hydrol. 2001, 245, 48–58. [Google Scholar] [CrossRef]
- Lu, Y.; Song, W.; Lu, J.; Wang, X.; Tan, Y. An Examination of Soil Moisture Estimation Using Ground Penetrating Radar in Desert Steppe. Water 2017, 9, 521. [Google Scholar] [CrossRef]
- Mahmoudzadeh Ardekani, M.R. Off- and on-Ground GPR Techniques for Field-Scale Soil Moisture Mapping. Geoderma 2013, 200–201, 55–66. [Google Scholar] [CrossRef]
- Pallavi, B.; Saito, H.; Kato, M. On Mapping Surface Moisture Content of Japanese Andisol Using GPR. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2011, 4, 804–808. [Google Scholar] [CrossRef]
- Steelman, C.M.; Endres, A.L. An Examination of Direct Ground Wave Soil Moisture Monitoring over an Annual Cycle of Soil Conditions. Water Resour. Res. 2010, 46. [Google Scholar] [CrossRef]
- Kummode, S.; Thitimakorn, T.; Kupongsak, S. Determination of the Volumetric Soil Water Content of Two Soil Types Using Ground Penetrating Radar: A Case Study in Thailand. EnvironmentAsia 2020, 13, 7887. [Google Scholar] [CrossRef]
- Weihermüller, L.; Huisman, J.A.; Lambot, S.; Herbst, M.; Vereecken, H. Mapping the Spatial Variation of Soil Water Content at the Field Scale with Different Ground Penetrating Radar Techniques. J. Hydrol. 2007, 340, 205–216. [Google Scholar] [CrossRef]
- Topp, G.C.; Davis, J.L.; Annan, A.P. Electromagnetic Determination of Soil Water Content: Measurements in Coaxial Transmission Lines. Water Resour. Res. 1980, 16, 574–582. [Google Scholar] [CrossRef]
- Gislason, P.O.; Benediktsson, J.A.; Sveinsson, J.R. Random Forests for Land Cover Classification. Pattern Recognit. Lett. 2006, 27, 294–300. [Google Scholar] [CrossRef]
- Rodriguez-Galiano, V.F.; Chica-Olmo, M.; Abarca-Hernandez, F.; Atkinson, P.M.; Jeganathan, C. Random Forest Classification of Mediterranean Land Cover Using Multi-Seasonal Imagery and Multi-Seasonal Texture. Remote Sens. Environ. 2012, 121, 93–107. [Google Scholar] [CrossRef]
- Sun, L.; Schulz, K. The Improvement of Land Cover Classification by Thermal Remote Sensing. Remote Sens. 2015, 7, 8368–8390. [Google Scholar] [CrossRef]
- Ließ, M.; Glaser, B.; Huwe, B. Uncertainty in the Spatial Prediction of Soil Texture: Comparison of Regression Tree and Random Forest Models. Geoderma 2012, 170, 70–79. [Google Scholar] [CrossRef]
- Bertalan, L.; Holb, I.; Pataki, A.; Négyesi, G.; Szabó, G.; Kupásné Szalóki, A.; Szabó, S. UAV-Based Multispectral and Thermal Cameras to Predict Soil Water Content—A Machine Learning Approach. Comput. Electron. Agric. 2022, 200, 107262. [Google Scholar] [CrossRef]
- Lendzioch, T.; Langhammer, J.; Vlček, L.; Minařík, R. Mapping the Groundwater Level and Soil Moisture of a Montane Peat Bog Using UAV Monitoring and Machine Learning. Remote Sens. 2021, 13, 907. [Google Scholar] [CrossRef]
- Guan, Y.; Grote, K.; Schott, J.; Leverett, K. Prediction of Soil Water Content and Electrical Conductivity Using Random Forest Methods with UAV Multispectral and Ground-Coupled Geophysical Data. Remote Sens. 2022, 14, 1023. [Google Scholar] [CrossRef]
- Zhu, C.; Ding, J.; Zhang, Z.; Wang, Z. Exploring the Potential of UAV Hyperspectral Image for Estimating Soil Salinity: Effects of Optimal Band Combination Algorithm and Random Forest. Spectrochim. Acta Part A Mol. Biomol. Spectrosc. 2022, 279, 121416. [Google Scholar] [CrossRef] [PubMed]
- Hu, J.; Peng, J.; Zhou, Y.; Xu, D.; Zhao, R.; Jiang, Q.; Fu, T.; Wang, F.; Shi, Z. Quantitative Estimation of Soil Salinity Using UAV-Borne Hyperspectral and Satellite Multispectral Images. Remote Sens. 2019, 11, 736. [Google Scholar] [CrossRef]
- Yuzugullu, O.; Lorenz, F.; Fröhlich, P.; Liebisch, F. Understanding Fields by Remote Sensing: Soil Zoning and Property Mapping. Remote Sens. 2020, 12, 1116. [Google Scholar] [CrossRef]
- Gholamy, A.; Kreinovich, V.; Kosheleva, O. Why 70/30 or 80/20 Relation Between Training and Testing Sets: A Pedagogical Explanation. Departmental Technical Reports (CS) 2018. Available online: https://scholarworks.utep.edu/cs_techrep/1209/ (accessed on 5 November 2023).
- Rijal, J.P.; Bergh, J.C. Food-Finding Capability of Grape Root Borer (Lepidoptera: Sesiidae) Neonates in Soil Column Bioassays. J. Entomol. Sci. 2016, 51, 54–68. [Google Scholar] [CrossRef]
- Smart, D.R.; Schwass, E.; Lakso, A.; Morano, L. Grapevine Rooting Patterns: A Comprehensive Analysis and a Review. Am. J. Enol. Vitic. 2006, 57, 89–104. [Google Scholar] [CrossRef]
- U.S. Geological Survey. What Are the Best Landsat Spectral Bands for Use in My Research?|U.S. Geological Survey. Available online: https://www.usgs.gov/faqs/what-are-best-landsat-spectral-bands-use-my-research (accessed on 15 March 2022).
- Bordoni, M.; Vercesi, A.; Maerker, M.; Ganimede, C.; Reguzzi, M.C.; Capelli, E.; Wei, X.; Mazzoni, E.; Simoni, S.; Gagnarli, E.; et al. Effects of Vineyard Soil Management on the Characteristics of Soils and Roots in the Lower Oltrepò Apennines (Lombardy, Italy). Sci. Total Environ. 2019, 693, 133390. [Google Scholar] [CrossRef]
- Morlat, R.; Jacquet, A. Grapevine Root System and Soil Characteristics in a Vineyard Maintained Long-Term with or without Interrow Sward. Am. J. Enol. Vitic. 2003, 54, 1–7. [Google Scholar] [CrossRef]
- Brown, R.N.; Percivalle, C.; Narkiewicz, S.; DeCuollo, S. Relative Rooting Depths of Native Grasses and Amenity Grasses with Potential for Use on Roadsides in New England. HortScience 2010, 45, 393–400. [Google Scholar] [CrossRef]
- Spectral Reflectance. Available online: http://gsp.humboldt.edu/olm/Courses/GSP_216/lessons/reflectance.html (accessed on 15 March 2022).
- Mondejar, J.P.; Tongco, A.F. Near Infrared Band of Landsat 8 as Water Index: A Case Study around Cordova and Lapu-Lapu City, Cebu, Philippines. Sustain. Environ. Res. 2019, 29, 16. [Google Scholar] [CrossRef]
- Celette, F.; Gaudin, R.; Gary, C. Spatial and Temporal Changes to the Water Regime of a Mediterranean Vineyard Due to the Adoption of Cover Cropping. Eur. J. Agron. 2008, 29, 153–162. [Google Scholar] [CrossRef]
- López-Vicente, M.; Pereira-Rodríguez, L.; da Silva-Dias, R.; Raposo-Díaz, X.; Wu, G.-L.; Paz-González, A. Role of Cultivars and Grass in the Stability of Soil Moisture and Temperature in an Organic Vineyard. Geoderma Reg. 2023, 33, e00631. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Equation | Reference | |
|---|---|---|---|
| Multispectral | Chlorophyll Index Green (CIG) | CIG = (NIR/Green) − 1 | [60] |
| Chlorophyll Index Red-Edge (CIRE) | ClRE = (NIR/RedEdge) − 1 | [61] | |
| Green Leaf Index (GLI) | GLI= (2Green − Red − Blue)/(2Green + Red + Blue) | [62] | |
| Green Normalized Difference Vegetation Index (GNDVI) | GNDVI = (NIR − Green)/(NIR + Green) | [63] | |
| Green–Red Vegetation Index (GRVI) | GRVI = NGRDI = (Green − Red)/(Green + Red) | [64] | |
| Modified Green–Red Vegetation Index (MGRVI) | MGRVI = (Green2 − Red2)/(Green2 + Red2) | [65] | |
| Modified Normalized Difference Water Index (NDWI) | NDWI = [(Blue + Green)/2 − (Infrared + Red)/2]/[(Blue + Green)/2 + (Infrared + Red)/2] | [66] | |
| Normalized Difference Red-Edge Index (NDRE) | NDRE = (NIR − RedEdge) /(NIR + RedEdge) | [67] | |
| Normalized Difference Vegetation Index (NDVI) | NDVI = (NIR − Red)/(NIR + Red) | [68] | |
| Red–Green–Blue Vegetation Index (RGBVI) | RGBVI = (Green2 − Blue × Red)/(Green2 + Blue × Red) | [65] | |
| Visible Atmospherically Resistant Index (VARI) | VARI = (Green − Red)/(Green + Red − Blue) | [69] | |
| Thermal | Normalized Relative Canopy Temperature Index (NRCT) | NRCT = (Ti − Tmin)/(Tmax − Tmin) Ti represents the pixel temperature, Tmin and Tmax are the lowest and highest temperatures obtained from the thermal data, respectively. | [70] |
| SWC from 500 MHz GPR (Sampling Depth ~ 18 cm) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Southeast Quadrant | Southern Half | Northwest Quadrant | Northern Half | ||||||||
| Mean | SD | Count | Mean | SD | Count | Mean | SD | Count | Mean | SD | Count |
| 0.174 | 0.053 | 6217 | 0.191 | 0.052 | 10,541 | 0.218 | 0.040 | 2491 | 0.180 | 0.049 | 7283 |
| SWC from 250 MHz GPR (Sampling Depth ~ 30 cm) | |||||||||||
| Southeast Quadrant | Southern Half | Northwest Quadrant | Northern Half | ||||||||
| Mean | SD | Count | Mean | SD | Count | Mean | SD | Count | Mean | SD | Count |
| 0.164 | 0.042 | 6265 | 0.168 | 0.044 | 10,724 | 0.188 | 0.042 | 2571 | 0.159 | 0.046 | 6590 |
| Prediction of SWC from 500 MHz GPR (Sampling Depth ≈ 0.18 m) | ||||||||
|---|---|---|---|---|---|---|---|---|
| Southeast Quadrant | Southern Half | Northwest Quadrant | Northern Half | |||||
| R2 | RMSE | R2 | RMSE | R2 | RMSE | R2 | RMSE | |
| Multispectral | 0.404 | 0.135 | 0.424 | 0.145 | 0.555 | 0.146 | 0.449 | 0.134 |
| Multispectral + Thermal | 0.557 | 0.117 | 0.555 | 0.128 | 0.727 | 0.114 | 0.574 | 0.118 |
| Multispectral + Thermal index NRCT | 0.548 | 0.118 | 0.565 | 0.127 | 0.727 | 0.114 | 0.584 | 0.116 |
| Prediction of SWC from 250 MHz GPR (Sampling Depth ≈ 0.30 m) | ||||||||
| Southeast Quadrant | Southern Half | Northwest Quadrant | Northern Half | |||||
| R2 | RMSE | R2 | RMSE | R2 | RMSE | R2 | RMSE | |
| Multispectral | 0.628 | 0.100 | 0.582 | 0.109 | 0.799 | 0.084 | 0.759 | 0.078 |
| Multispectral + Thermal | 0.743 | 0.084 | 0.704 | 0.092 | 0.879 | 0.066 | 0.830 | 0.066 |
| Multispectral + Thermal index NRCT | 0.735 | 0.084 | 0.696 | 0.093 | 0.882 | 0.065 | 0.831 | 0.066 |
| The Most Important UAV-Based Data for Predicting SWC, 500 MHz GPR | ||||||
|---|---|---|---|---|---|---|
| Ranking | Southeast Quadrant | Northwest Quadrant | ||||
| Multispectral | Multispectral + Thermal | Multispectral + NRCT | Multispectral | Multispectral + Thermal | Multispectral + NRCT | |
| 1 | NIR band | Thermal temperature | NRCT | NIR band | Thermal temperature | NRCT |
| 2 | NDVI | Green band | Red-edge band | MGRVI | VARI | VARI |
| 3 | Red band | Blue band | Green band | Green band | Green band | NDVI |
| Ranking | Southern Half | Northern Half | ||||
| Multispectral | Multispectral + Thermal | Multispectral + NRCT | Multispectral | Multispectral + Thermal | Multispectral + NRCT | |
| 1 | Red band | Thermal temperature | NRCT | Red band | Thermal temperature | NRCT |
| 2 | CIG | Red band | NDWI | CIG | Blue band | Blue band |
| 3 | NIR band | CIG | NDVI | NIR band | VARI | NDWI |
| The Most Important UAV-Based Data for Predicting SWC, 250 MHz GPR | ||||||
|---|---|---|---|---|---|---|
| Ranking | Southeast Quadrant | Northwest Quadrant | ||||
| Multispectral | Multispectral + Thermal | Multispectral + NRCT | Multispectral | Multispectral + Thermal | Multispectral + NRCT | |
| 1 | GLI | Thermal temperature | NRCT | MGRVI | Thermal temperature | NRCT |
| 2 | CIG | CIG | Blue band | Red band | NDRE | Green band |
| 3 | Green band | VARI | CIG | Green band | Red band | NDVI |
| Ranking | Southern Half | Northern Half | ||||
| Multispectral | Multispectral + Thermal | Multispectral + NRCT | Multispectral | Multispectral + Thermal | Multispectral + NRCT | |
| 1 | Red-edge band | Thermal temperature | NRCT | CIG | Thermal temperature | NRCT |
| 2 | NIR band | CIG | Red band | RGBVI | NDWI | Blue band |
| 3 | CIG | Green band | Green band | Blue band | Green band | NDVI |
| Prediction of SWC from 500 MHz GPR Using Grapevine Canopy Data | ||||||||
|---|---|---|---|---|---|---|---|---|
| Data Set | Southeast Quadrant | Southern Half | Northwest Quadrant | Northern Half | ||||
| R2 | RMSE | R2 | RMSE | R2 | RMSE | R2 | RMSE | |
| Multispectral | 0.262 | 0.151 | 0.284 | 0.162 | 0.45 | 0.162 | 0.479 | 0.131 |
| Multispectral + Thermal | 0.427 | 0.133 | 0.457 | 0.141 | 0.564 | 0.145 | 0.578 | 0.118 |
| Multispectral + NRCT | 0.432 | 0.133 | 0.435 | 0.144 | 0.565 | 0.144 | 0.575 | 0.118 |
| Prediction of SWC from 250 MHz GPR Using Grapevine Canopy Data | ||||||||
| Data Set | Southeast Quadrant | Southern Half | Northwest Quadrant | Northern Half | ||||
| R2 | RMSE | R2 | RMSE | R2 | RMSE | R2 | RMSE | |
| Multispectral | 0.514 | 0.115 | 0.423 | 0.128 | 0.66 | 0.110 | 0.664 | 0.092 |
| Multispectral + Thermal | 0.68 | 0.093 | 0.579 | 0.109 | 0.785 | 0.087 | 0.776 | 0.076 |
| Multispectral + NRCT | 0.688 | 0.092 | 0.571 | 0.110 | 0.778 | 0.089 | 0.772 | 0.076 |
| Blue | Green | Red | Red-Edge | NIR | |
|---|---|---|---|---|---|
| Before precipitation | 43.42 | 96.414 | 65.093 | 140.19 | 63.766 |
| After precipitation | 40.194 | 97.197 | 63.984 | 138.879 | 59.88 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guan, Y.; Grote, K. Assessing the Potential of UAV-Based Multispectral and Thermal Data to Estimate Soil Water Content Using Geophysical Methods. Remote Sens. 2024, 16, 61. https://doi.org/10.3390/rs16010061
Guan Y, Grote K. Assessing the Potential of UAV-Based Multispectral and Thermal Data to Estimate Soil Water Content Using Geophysical Methods. Remote Sensing. 2024; 16(1):61. https://doi.org/10.3390/rs16010061
Chicago/Turabian StyleGuan, Yunyi, and Katherine Grote. 2024. "Assessing the Potential of UAV-Based Multispectral and Thermal Data to Estimate Soil Water Content Using Geophysical Methods" Remote Sensing 16, no. 1: 61. https://doi.org/10.3390/rs16010061
APA StyleGuan, Y., & Grote, K. (2024). Assessing the Potential of UAV-Based Multispectral and Thermal Data to Estimate Soil Water Content Using Geophysical Methods. Remote Sensing, 16(1), 61. https://doi.org/10.3390/rs16010061