

Measurement Refinements of Ground-Based Radar Interferometry in Bridge Load Test Monitoring: Comprehensive Analysis on a Multi-Span Cable-Stayed Bridge

Abstract
1. Introduction
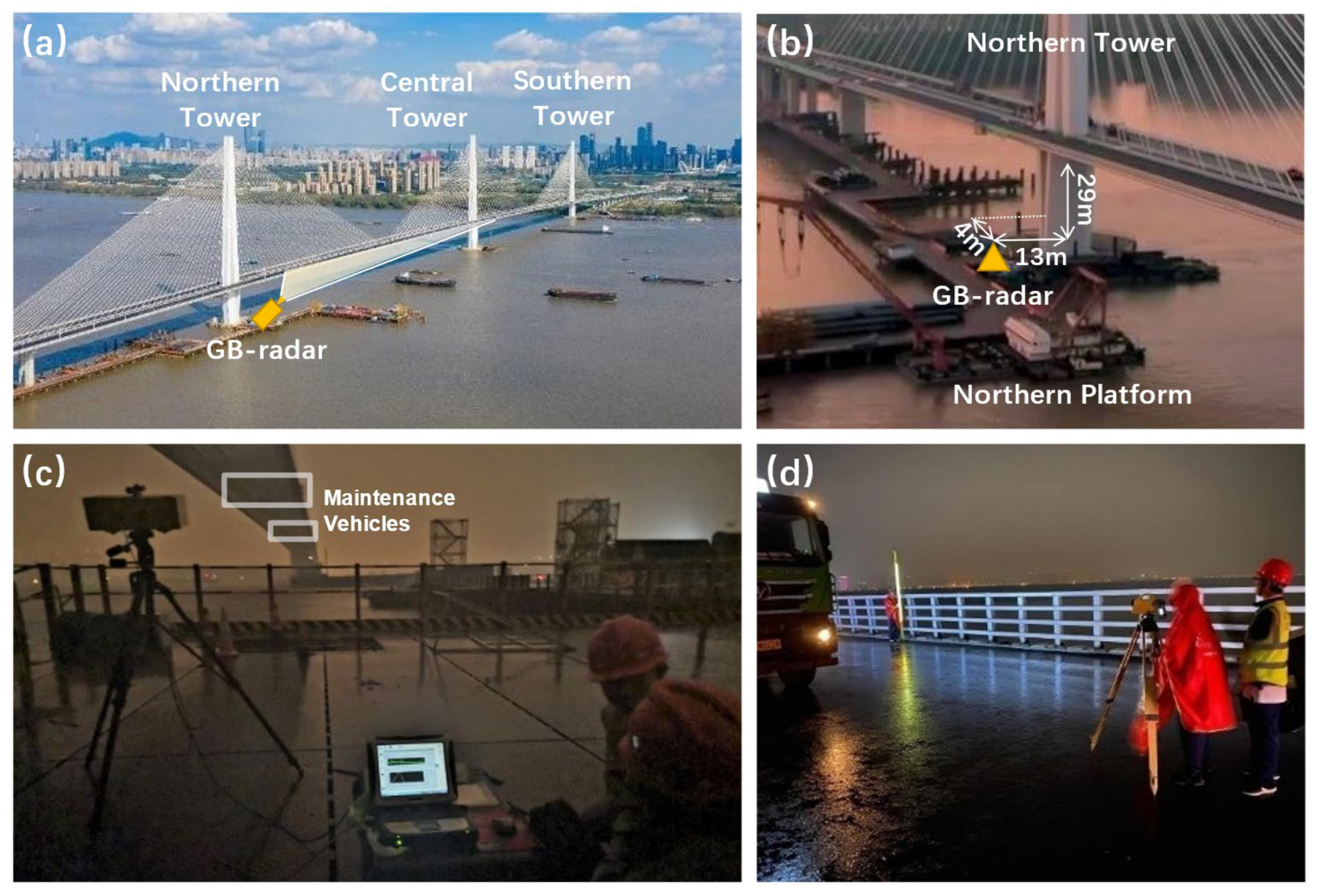
2. Materials and Test Setting
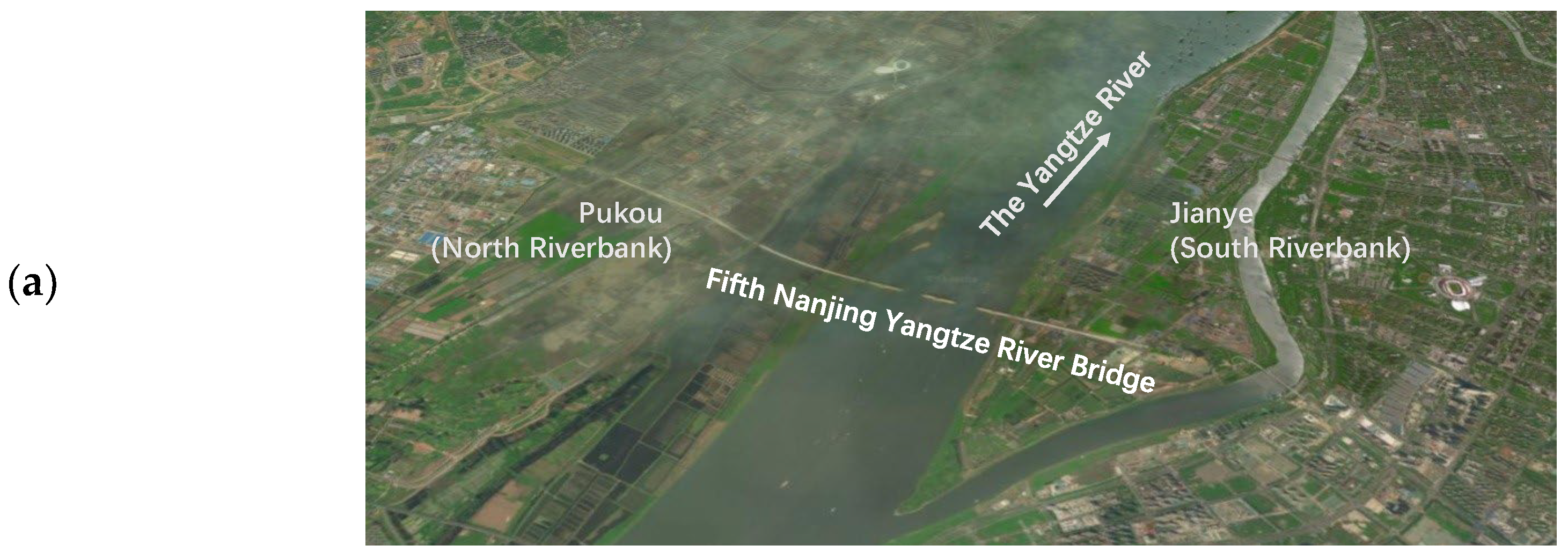
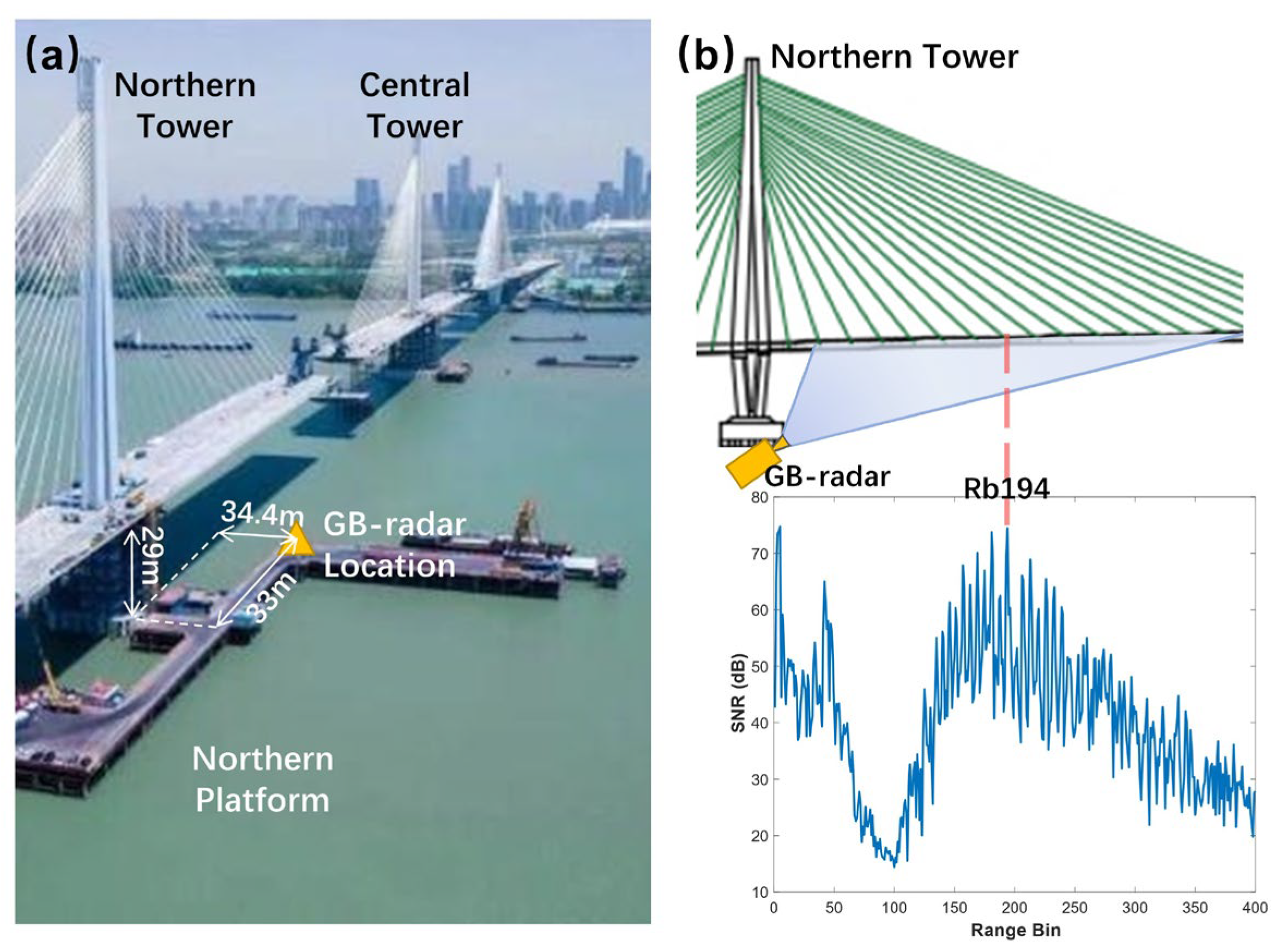
2.1. Bridge Description
2.2. Load Test Setting
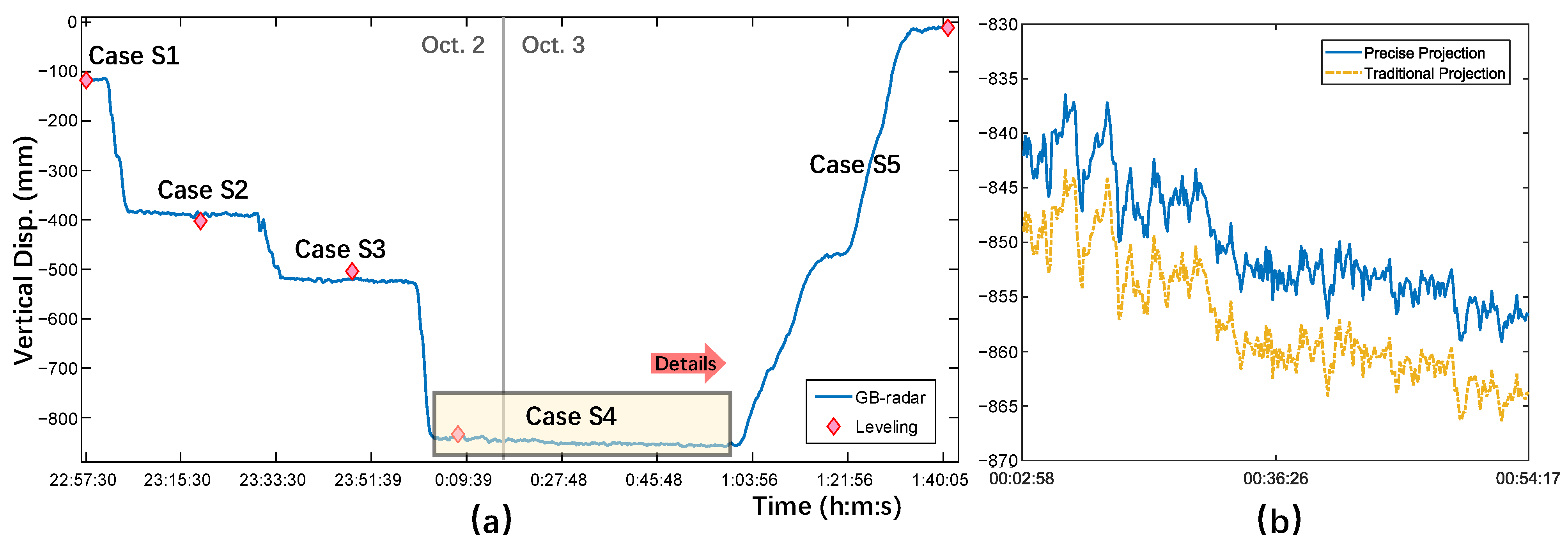
2.2.1. Static Load Test Setting
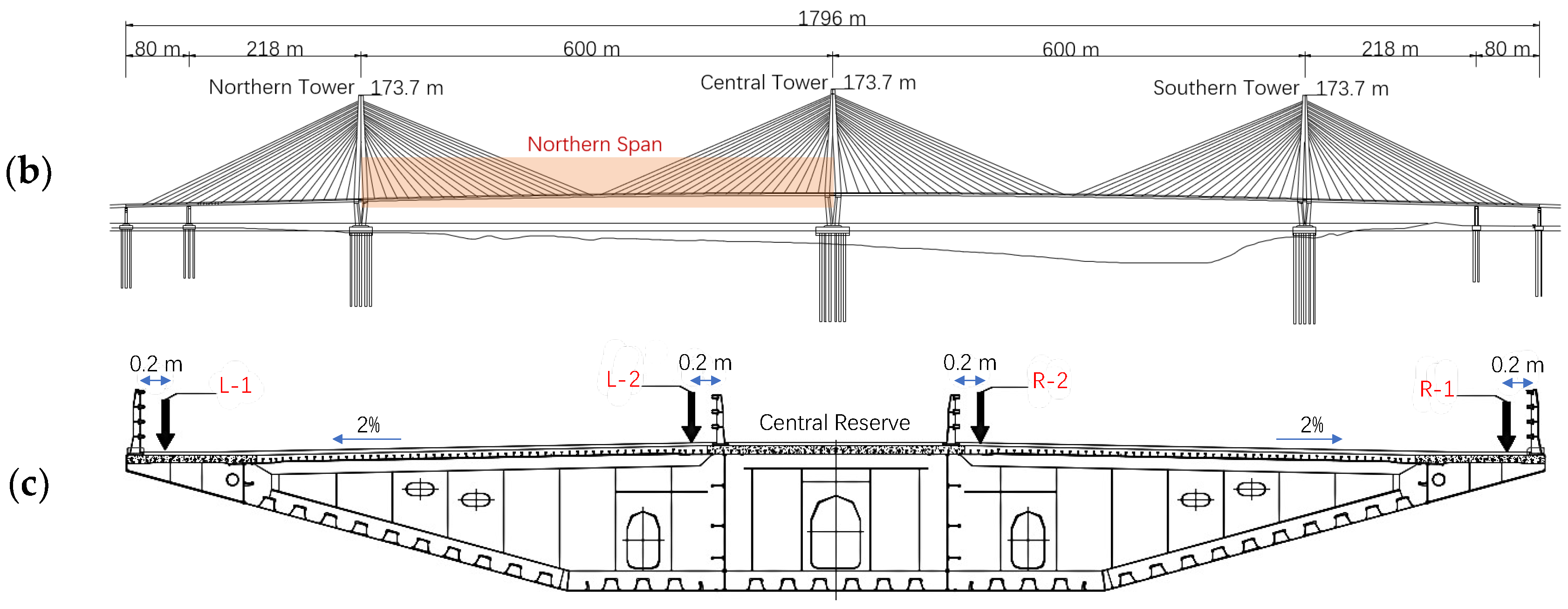
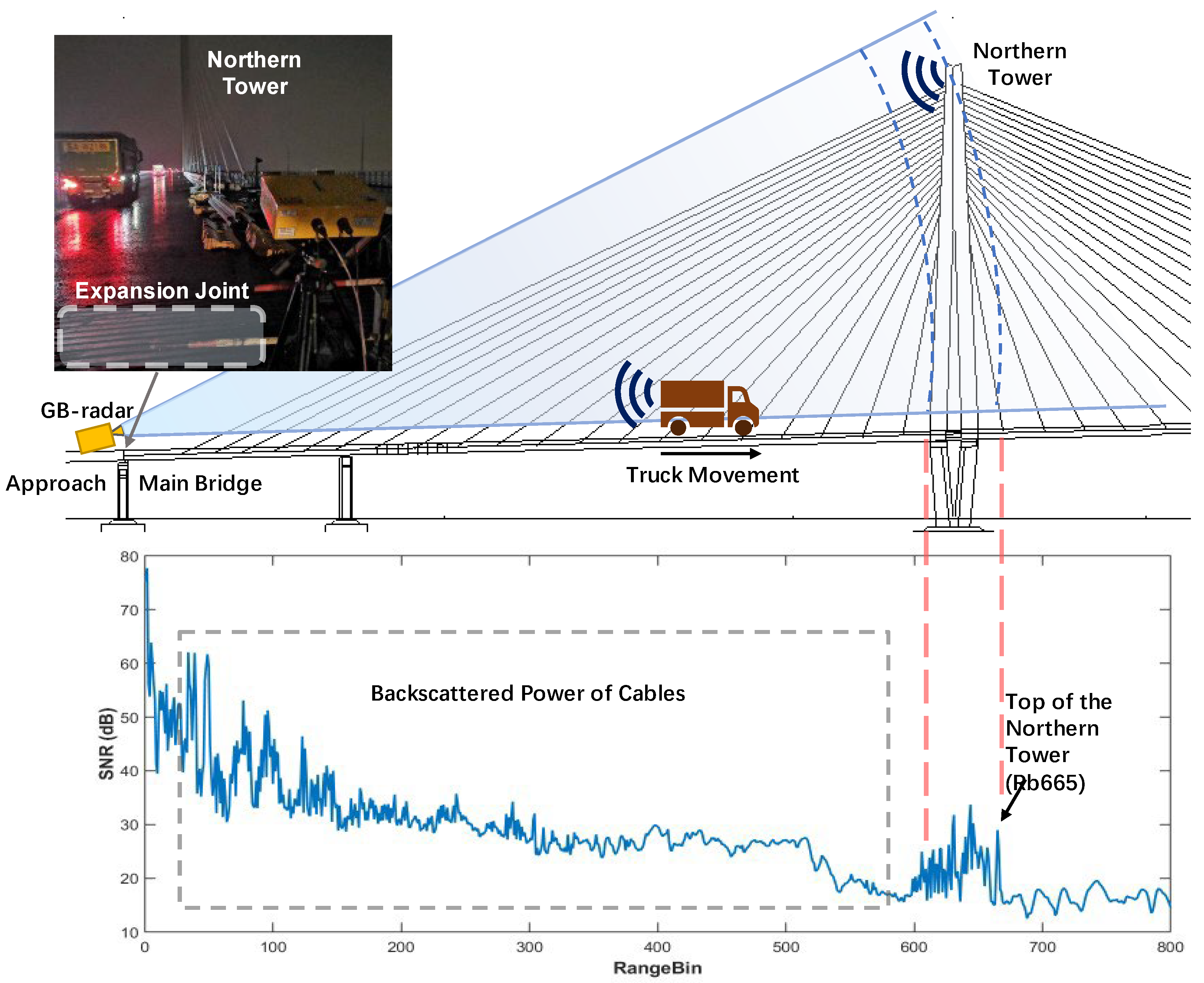
2.2.2. Dynamic Load Test Setting
3. Methodology
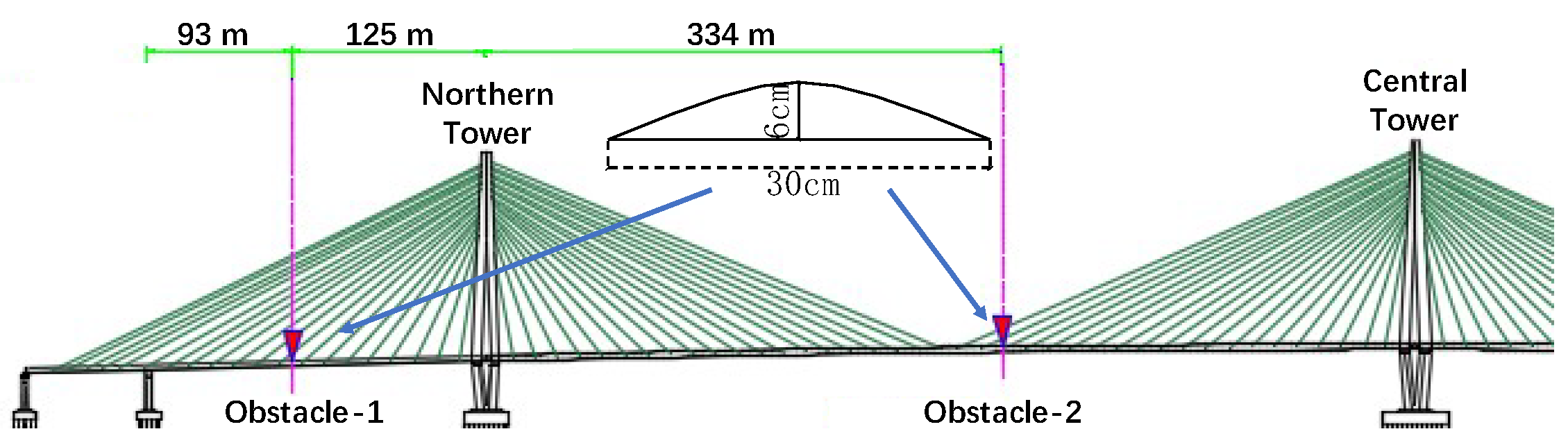
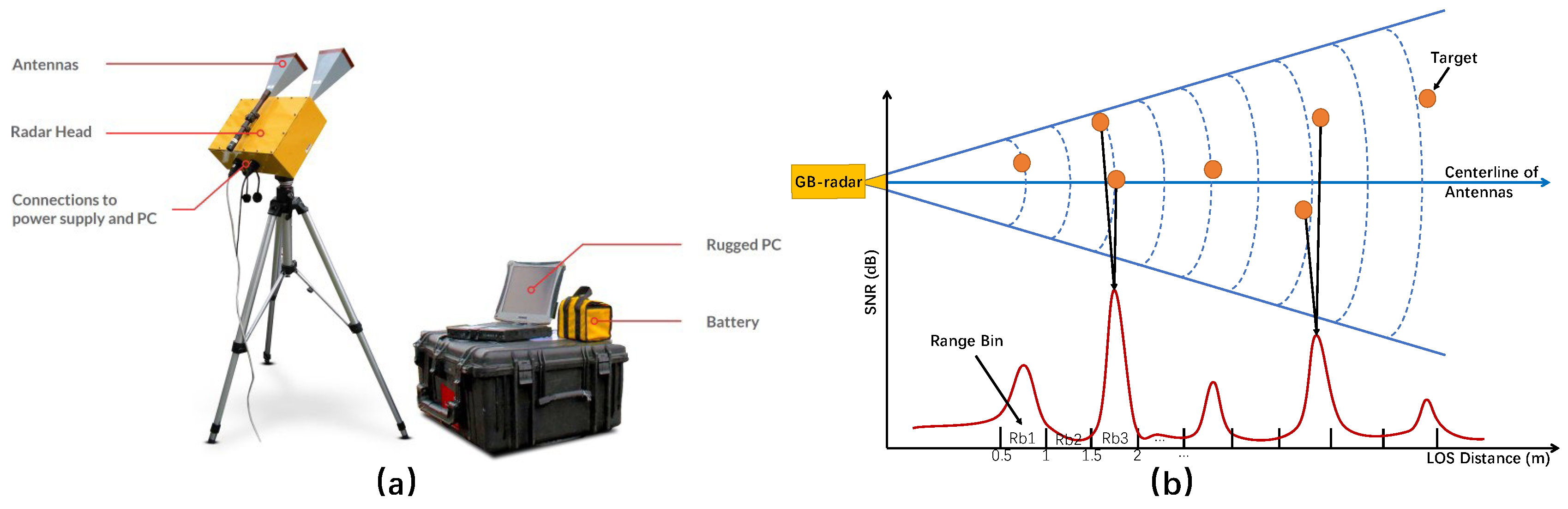
3.1. Ground-Based Radar Interferometry for Displacement Measurement
3.2. Phase Jump Detecting and Recovering
3.3. Geometric Projection Considering Bridge Deformation
4. Results
4.1. Recovery of Phase Jumps
4.2. Static Monitoring
4.3. Dynamic Monitoring
4.4. Ambient Frequencies
5. Discussion
5.1. Implications of Continuous Deformation Observations
5.2. Potential and Limitations of GB-Radar SHM
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cai, H.; Abudayyeh, O.; Abdel-Qader, I.; Attanayake, U.; Barbera, J.; Almaita, E. Bridge Deck Load Testing Using Sensors and Optical Survey Equipment. Adv. Civ. Eng. 2012, 2012, 493983. [Google Scholar] [CrossRef]
- Lantsoght, E.O.L.; Veen, C.v.d.; Boer, A.d.; Hordijk, D.A. State-of-the-art on load testing of concrete bridges. Eng. Struct. 2017, 150, 231–241. [Google Scholar] [CrossRef]
- Sabato, A.; Niezrecki, C.; Fortino, G. Wireless MEMS-Based Accelerometer Sensor Boards for Structural Vibration Monitoring: A Review. IEEE Sens. J. 2017, 17, 226–235. [Google Scholar] [CrossRef]
- Fukuda, Y.; Feng, M.Q.; Narita, Y.; Kaneko, S.i.; Tanaka, T. Vision-Based Displacement Sensor for Monitoring Dynamic Response Using Robust Object Search Algorithm. IEEE Sens. J. 2013, 13, 4725–4732. [Google Scholar] [CrossRef]
- Drumea, A.; Vasile, A.; Comes, M.; Blejan, M. System on Chip Signal Conditioner for LVDT Sensors. In Proceedings of the 2006 1st Electronic Systemintegration Technology Conference, Dresden, Germany, 5–7 September 2006; pp. 629–634. [Google Scholar]
- Colesanti, C.; Ferretti, A.; Prati, C.; Rocca, F. Comparing GPS, optical leveling and permanent scatterers. In Proceedings of the IGARSS 2001. Scanning the Present and Resolving the Future. Proceedings. IEEE 2001 International Geoscience and Remote Sensing Symposium (Cat. No.01CH37217), Sydney, NSW, Australia, 9–13 July 2001; Volume 2626, pp. 2622–2624. [Google Scholar]
- Ribeiro, D.; Calçada, R.; Ferreira, J.; Martins, T. Non-contact measurement of the dynamic displacement of railway bridges using an advanced video-based system. Eng. Struct. 2014, 75, 164–180. [Google Scholar] [CrossRef]
- Shen, N.; Wang, B.; Gao, G.; Chen, L.; Chen, R. 3-D Displacement Detection Based on Enhanced Clustering From GNSS Positioning in a Kinematic Mode for Deformation Monitoring. IEEE Trans. Instrum. Meas. 2023, 72, 6500810. [Google Scholar] [CrossRef]
- Rödelsperger, S.; Läufer, G.; Gerstenecker, C.; Becker, M. Monitoring of displacements with ground-based microwave interferometry: IBIS-S and IBIS-L. J. Appl. Geod. 2010, 4, 41–54. [Google Scholar] [CrossRef]
- Gikas, V. Ambient vibration monitoring of slender structures by microwave interferometer remote sensing. J. Appl. Geod. 2012, 6, 167–176. [Google Scholar] [CrossRef]
- Sofi, M.; Lumantarna, E.; Zhong, A.; Mendis, P.A.; Duffield, C.; Barnes, R. Determining dynamic characteristics of high rise buildings using interferometric radar system. Eng. Struct. 2018, 164, 230–242. [Google Scholar] [CrossRef]
- Zhou, L.; Guo, J.; Wen, X.; Ma, J.; Yang, F.; Wang, C.; Zhang, D. Monitoring and Analysis of Dynamic Characteristics of Super High-rise Buildings using GB-RAR: A Case Study of the WGC under Construction, China. Appl. Sci. 2020, 10, 808. [Google Scholar] [CrossRef]
- Farrar, C.R.; Darling, T.W.; Migliori, A.; Baker, W.E. Microwave interferometers for non-contact vibration measurements on large structures. Mech. Syst. Signal Process. 1999, 13, 241–253. [Google Scholar] [CrossRef]
- Pramudita, A.A.; Lin, D.B.; Dhiyani, A.A.; Ryanu, H.H.; Adiprabowo, T.; Yudha, E.A. FMCW Radar for Noncontact Bridge Structure Displacement Estimation. IEEE Trans. Instrum. Meas. 2023, 72, 8504914. [Google Scholar] [CrossRef]
- Strozzi, T.; Werner, C.; Wiesmann, A.; Wegmuller, U. Topography Mapping with a Portable Real-Aperture Radar Interferometer. IEEE Geosci. Remote Sens. Lett. 2012, 9, 277–281. [Google Scholar] [CrossRef]
- Jiang, L. Ground-Based Radar. In International Encyclopedia of Geography: People, the Earth, Environment and Technology; Wiley-Blackwell: Hoboken, NJ, USA, 2017; pp. 1–4. [Google Scholar]
- Michel, C.; Keller, S. Advancing Ground-Based Radar Processing for Bridge Infrastructure Monitoring. Sensors 2021, 21, 2172. [Google Scholar] [CrossRef] [PubMed]
- Felguera-Martín, D.; González-Partida, J.-T.; Almorox-González, P.; Burgos-García, M.; Dorta-Naranjo, B.-P. Interferometric inverse synthetic aperture radar experiment using an interferometric linear frequency modulated continuous wave millimetre-wave radar. IET Radar Sonar Navig. 2011, 5, 39–47. [Google Scholar] [CrossRef]
- Pieraccini, M.; Fratini, M.; Parrini, F.; Atzeni, C. Dynamic Monitoring of Bridges Using a High-Speed Coherent Radar. IEEE Trans. Geosci. Remote Sens. 2006, 44, 3284–3288. [Google Scholar] [CrossRef]
- Coppi, F.; Gentile, C.; Paolo Ricci, P.; Tomasini, E.P. A Software Tool for Processing the Displacement Time Series Extracted from Raw Radar Data. AIP Conf. Proc. 2010, 1253, 190–201. [Google Scholar] [CrossRef]
- Huang, Q.; Wang, Y.; Luzi, G.; Crosetto, M.; Monserrat, O.; Jiang, J.; Zhao, H.; Ding, Y. Ground-Based Radar Interferometry for Monitoring the Dynamic Performance of a Multitrack Steel Truss High-Speed Railway Bridge. Remote Sens. 2020, 12, 2594. [Google Scholar] [CrossRef]
- Lyu, L.; Cui, B.; Zhong, H.; Gu, Y.; Guo, Z. Study on Nonlinear Stability of Structure for Main Bridge of Fifth Changjiang River Bridge in Nanjing. Bridge Constr. 2019, 49, 40–45. [Google Scholar]
- New Bridge over Yangtze Opens to Traffic in East China. Xinhua 2020. Available online: http://www.xinhuanet.com/english/2020-12/24/c_139616135.htm (accessed on 21 April 2023).
- Jian, B.; Li, M.; Li, M.; Su, Y. Influence of wind yaw angle and pylon interference on the buffeting responses of cable-stayed bridges during construction. Struct. Infrastruct. Eng. 2021, 18, 1350–1364. [Google Scholar] [CrossRef]
- Kampes, B.M. Radar Interferometry; Springer Dordrecht: Dordrecht, The Netherlands, 2006. [Google Scholar]
- Gentile, C.; Bernardini, G. Radar-based measurement of deflections on bridges and large structures. Eur. J. Environ. Civ. Eng. 2010, 14, 495–516. [Google Scholar] [CrossRef]
- Moreira, A.; Prats-Iraola, P.; Younis, M.; Krieger, G.; Hajnsek, I.; Papathanassiou, K.P. A tutorial on synthetic aperture radar. IEEE Geosci. Remote Sens. Mag. 2013, 1, 6–43. [Google Scholar] [CrossRef]
- Akima, H. A New Method of Interpolation and Smooth Curve Fitting Based on Local Procedures. J. ACM 1970, 17, 589–602. [Google Scholar] [CrossRef]
- Senne, J.H.; Smith, T.K. Dynamics of Highway Bridges; HR-67; Iowa Engineering Experiment Station: Ames, IA, USA, 1961. [Google Scholar]
- Swannell, P.; Miller, C. Theoretical and experimental studies of a bridge-vehicle system. Proc. Inst. Civ. Eng. 1987, 83, 613–635. [Google Scholar] [CrossRef]
- Zhang, G.; Wu, Y.; Zhao, W.; Zhang, J. Radar-based multipoint displacement measurements of a 1200-m-long suspension bridge. ISPRS J. Photogramm. Remote Sens. 2020, 167, 71–84. [Google Scholar] [CrossRef]
- Sanayei, M.; Phelps, J.E.; Sipple, J.D.; Bell, E.S.; Brenner, B.R. Instrumentation, nondestructive testing, and finite-element model updating for bridge evaluation using strain measurements. J. Bridge Eng. 2012, 17, 130–138. [Google Scholar] [CrossRef]
- Li, J.; He, H.; He, H.; Li, L.; Xiang, Y. An End-to-End Framework With Multisource Monitoring Data for Bridge Health Anomaly Identification. IEEE Trans. Instrum. Meas. 2021, 70, 99. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Loading Conditions | Num. of Vehicles | No. of Vehicles | Duration | Loading Section | Target Location | GB-Radar Location |
|---|---|---|---|---|---|---|---|
| S1 | 1st Stage Loading | 9 | B1–B9 | 5 min | Middle of the Northern Main Span | Middle of the Northern Main Span | Northern Construction Platform |
| S2 | 2nd Stage Loading | 18 | B1–B9 C1–C9 | 30 min | |||
| S3 | 3rd Stage Loading | 27 | A1–A9 B1–B9 C1–C9 | 30 min | |||
| S4 | 4th Stage Loading | 36 | A1–A9 B1–B9 C1–C9 D1–D9 | 50 min | |||
| S5 | Unloading Process | 0 | / | 40 min | |||
| S6 | Loading Process | 7 | B1–B7 | 462 s | Middle of the Southern Side Span | Top of the Northern Pylon | Northern Bridge Approach |
| Case | Velocity (km/h) | Presence of Obstacles | Num. of Trucks | GB-radar Location |
|---|---|---|---|---|
| D1 | 20 | No | 2 | Northern Construction Platform |
| D2 | 40 | 2 | ||
| D3 | 60 | 2 | ||
| D4 | 80 | 1 | ||
| D5 | 20 | Yes | 1 |
| IBIS-S Parameters | |
|---|---|
| Central Frequency | 17.2 GHz |
| Maximum Operation Range | 1000 m |
| Maximum Range Resolution | 0.5 m * |
| Maximum Acquisition Frequency | 200 Hz |
| Nominal Displacement Accuracy | 0.02 mm |
| Operating Temperature Range | −20 °C to +55 °C |
| Antenna Gain | 19 dBi |
| Antenna Field of View | Horizontal 17° Vertical 15° |
| Point | Start (mm) | S1 (mm) | S2 (mm) | S3 (mm) | S4 (mm) | S5 (mm) |
|---|---|---|---|---|---|---|
| L-1 | 0.0 | −272.3 | −402.8 | −719.8 | −832.4 | −10.3 |
| L-2 | 0.0 | −211.5 | −402.8 | −629.1 | −831.0 | −12.4 |
| R-2 | 0.0 | −179.9 | −401.2 | −585.8 | −831.3 | −11.4 |
| R-1 | 0.0 | −117.5 | −402.5 | −504.1 | −840.2 | −10.3 |
| Rb442 | / | −116.1 | −392.3 | −518.2 | −845.1 | −10.5 |
| Difference * | / | 1.4 | 10.2 | −14.1 | −4.9 | −0.2 |
| Mode * | Frequency (Hz) | ||
|---|---|---|---|
| Theoretical | Accelerometer | IBIS-S | |
| V-A-1 | 0.159 | 0.191 | / |
| L-A-1 | 0.207 | 0.211 | |
| V-S-1 | 0.246 | 0.281 | 0.28247 |
| L-S-1 | 0.266 | 0.306 | 0.30601 |
| V-A-2 | 0.271 | 0.309 | 0.30993 |
| V-S-2 | 0.359 | 0.397 | 0.39624 |
| V-A-3 | 0.406 | 0.474 | 0.47471 |
| V-S-3 | 0.459 | 0.511 | 0.51001 |
| V-A-4 | 0.514 | 0.572 | / |
| V-S-4 | 0.523 | 0.593 | / |
| V-A-5 | 0.580 | 0.634 | 0.63556 |
| V-S-5 | 0.593 | 0.652 | / |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Huang, Q.; Zhang, T.; Zhou, M.; Jiang, L. Measurement Refinements of Ground-Based Radar Interferometry in Bridge Load Test Monitoring: Comprehensive Analysis on a Multi-Span Cable-Stayed Bridge. Remote Sens. 2024, 16, 1882. https://doi.org/10.3390/rs16111882
Chen Y, Huang Q, Zhang T, Zhou M, Jiang L. Measurement Refinements of Ground-Based Radar Interferometry in Bridge Load Test Monitoring: Comprehensive Analysis on a Multi-Span Cable-Stayed Bridge. Remote Sensing. 2024; 16(11):1882. https://doi.org/10.3390/rs16111882
Chicago/Turabian StyleChen, Yaowen, Qihuan Huang, Tingbin Zhang, Ming Zhou, and Liming Jiang. 2024. "Measurement Refinements of Ground-Based Radar Interferometry in Bridge Load Test Monitoring: Comprehensive Analysis on a Multi-Span Cable-Stayed Bridge" Remote Sensing 16, no. 11: 1882. https://doi.org/10.3390/rs16111882
APA StyleChen, Y., Huang, Q., Zhang, T., Zhou, M., & Jiang, L. (2024). Measurement Refinements of Ground-Based Radar Interferometry in Bridge Load Test Monitoring: Comprehensive Analysis on a Multi-Span Cable-Stayed Bridge. Remote Sensing, 16(11), 1882. https://doi.org/10.3390/rs16111882