
Multi-Shot Simultaneous Deghosting for Virtual-Shot Gathers via Integrated Sparse and Nuclear Norm Constraint Inversion

Abstract
:1. Introduction
2. Materials and Methods
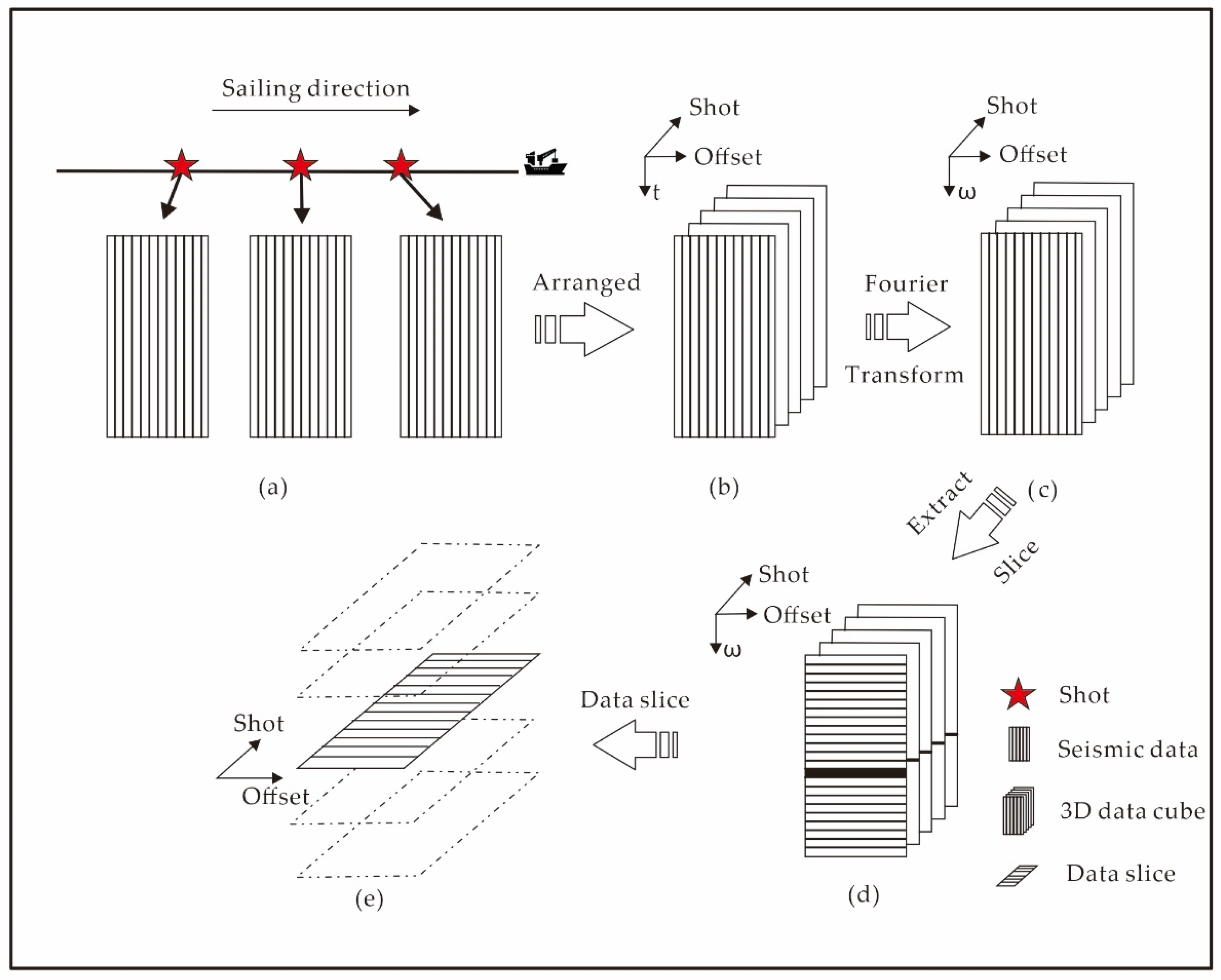
2.1. Foundational Information
2.2. Multi-Shots’ Sparse Inversion with Nuclear Norm Constraint Deghosting Framework
2.2.1. Joint Inversion Framework with Sparse and Nuclear Norm Constraints
2.2.2. Multi-Shots’ Simultaneous Deghosting Framework
2.3. Data Description
2.3.1. Synthetic Data
2.3.2. Field Data
3. Results
3.1. Synthetic Data Result
3.2. Field Data Result
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
References
- Snieder, R.; Miyazawa, M.; Slob, E.; Vasconcelos, I.; Wapenaar, K. A Comparison of Strategies for Seismic Interferometry. Surv. Geophys. 2009, 30, 503–523. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, J.; Guo, C.; Zhao, S.; Cheng, H. Seismic Interferometry in Linear Radon Domain Applying to Noise Passive Data. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Ramirez, A.C.; Weglein, A.B.; Otnes, E.; Hokstad, K. The role of the direct wave and Green’s theorem in seismic interferometry and spurious multiples. In SEG Technical Program Expanded Abstracts 2007; Society of Exploration Geophysicists: Houston, TX, USA, 2007; pp. 2471–2475. [Google Scholar]
- Wang, Y.; Luo, Y.; Schuster, G.T. Interferometric interpolation of missing seismic data. Geophysics 2009, 74, SI37–SI45. [Google Scholar] [CrossRef]
- Melo, G.; Malcolm, A.; Fehler, M. Comparison of microearthquake locations using seismic interferometry principles. In SEG Technical Program Expanded Abstracts 2012; Society of Exploration Geophysicists: Houston, TX, USA, 2012; pp. 1–5. [Google Scholar]
- Gu, N.; Chamarczuk, M.; Gao, J.; Malinowski, M.; Zhang, H. Passive seismic structure imaging of a coal mine by ambient noise seismic interferometry on a dense array. Acta Geol. Sin. Engl. Ed. 2021, 95, 37–39. [Google Scholar] [CrossRef]
- Yu, J.; Kim, B.-Y.; Joo, Y. A processing for ocean-bottom multicomponent data with seismic interferometry: A case study of southern offshore in Korea. Explor. Geophys. 2023, 54, 533–543. [Google Scholar] [CrossRef]
- Zhang, F.; Zhang, P.; Xu, Z.; Gong, X.; Han, L. Multisource Seismic Full Waveform Inversion of Metal Ore Bodies. Minerals 2022, 12, 4. [Google Scholar] [CrossRef]
- Liu, Q.; Feng, X.; Liu, C.; Zhang, M.; Tian, Y.; Hou, H. Metallic mineral exploration by using ambient noise tomography in Ashele copper mine, Xinjiang, China. Geophysics 2022, 87, B221–B231. [Google Scholar] [CrossRef]
- Curtis, A.; Nicolson, H.; Halliday, D.; Trampert, J.; Baptie, B. Virtual seismometers in the subsurface of the Earth from seismic interferometry. Nat. Geosci. 2009, 2, 700–704. [Google Scholar] [CrossRef]
- Brenguier, F.; Baue, P.; Ben-Zion, Y.; Vernon, F.; Johnson, C.W.; Mordret, A.; Coutant, O.; Share, P.E.; Beauce, E.; Hollis, D.; et al. Train Traffic as a Powerful Noise Source for Monitoring Active Faults With Seismic Interferometry. Geophys. Res. Lett. 2019, 46, 9529–9536. [Google Scholar] [CrossRef]
- Mao, S.; Lecointre, A.; van der Hilst, R.D.; Campillo, M. Space-time monitoring of groundwater fluctuations with passive seismic interferometry. Nat. Commun. 2022, 13, 4643. [Google Scholar] [CrossRef]
- King, S.; Curtis, A. Suppressing nonphysical reflections in Green’s function estimates using source-receiver interferometry. Geophysics 2012, 77, Q15–Q25. [Google Scholar] [CrossRef]
- Viens, L.; Van Houtte, C. Denoising ambient seismic field correlation functions with convolutional autoencoders. Geophys. J. Int. 2020, 220, 1521–1535. [Google Scholar] [CrossRef]
- Hu, B.; Wang, D.; Wang, R. An Iterative Focal Denoising Strategy for Passive Seismic Data. Pure Appl. Geophys. 2020, 177, 4607–4622. [Google Scholar] [CrossRef]
- Othman, A.; Iqbal, N.; Hanafy, S.M.; Bin Waheed, U. Automated Event Detection and Denoising Method for Passive Seismic Data Using Residual Deep Convolutional Neural Networks. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–11. [Google Scholar] [CrossRef]
- van Groenestijn, G.J.A.; Verschuur, D.J. Estimation of primaries by sparse inversion from passive seismic data. Geophysics 2010, 75, SA61–SA69. [Google Scholar] [CrossRef]
- Cheng, H.; Wang, D.-L.; Feng, F.; Zhu, H. Estimating primaries from passive seismic data. Explor. Geophys. 2015, 46, 184–191. [Google Scholar] [CrossRef]
- Zhao, B.; Han, L.; Zhang, P.; Yin, Y. Weak Signal Enhancement for Passive Seismic Data Reconstruction Based on Deep Learning. Remote Sens. 2022, 14, 5318. [Google Scholar] [CrossRef]
- Wei, J.; Liu, H.; Xing, L.; Du, D. Application of seismic interferometric migration for shallow seismic high precision data processing: A case study in the Shenhu area. J. Ocean Univ. China 2018, 17, 46–52. [Google Scholar] [CrossRef]
- Ghosh, S.K. Deconvolving the ghost effect of the water surface in marine seismics. Geophysics 2000, 65, 1831–1836. [Google Scholar] [CrossRef]
- Amundsen, L.; Weglein, A.B.; Reitan, A. On seismic deghosting using integral representation for the wave equation: Use of Green’s functions with Neumann or Dirichlet boundary conditions. Geophysics 2013, 78, T89–T98. [Google Scholar] [CrossRef]
- Seher, T.; Ren, Y.; Masoomzadeh, H.; Degel, T.; Cho, E.; Hawke, M.; Baldock, S. Deconvolution of upgoing and downgoing wavefields: A data example from the Utsira OBN survey. In Proceedings of the 83rd EAGE Annual Conference & Exhibition, Madrid, Spain, 6–9 June 2022; pp. 1–5. [Google Scholar]
- Wang, P.; Ray, S.; Nimsaila, K. 3D joint deghosting and crossline interpolation for marine single-component streamer data. In Proceedings of the SEG International Exposition and Annual Meeting, Denver, CO, USA, 26–31 October 2014; p. SEG-2014-0882. [Google Scholar]
- King, S.; Poole, G. Hydrophone-only receiver deghosting using a variable sea surface datum. In Proceedings of the SEG International Exposition and Annual Meeting, New Orleans, Louisiana, 18–23 October 2015; p. SEG-2015-5891123. [Google Scholar]
- Zhang, Z.; Masoomzadeh, H.; Wang, B. Evolution of deghosting process for single-sensor streamer data from 2D to 3D. Geophys. Prospect. 2018, 66, 975–986. [Google Scholar] [CrossRef]
- Cao, J.; Blacquière, G. Receiver Deghosting with Blended Data Using Sparse Inversion. In Proceedings of the 82nd EAGE Annual Conference & Exhibition, Amsterdam, The Netherlands, 18–21 October 2021; pp. 1–5. [Google Scholar]
- Hardwick, A.; Charron, P.; Masoomzadeh, H.; Aiyepeku, A.; Cox, P.; Laha, S. Accounting for sea surface variation in deghosting–a novel approach applied to a 3D dataset offshore west Africa. In SEG Technical Program Expanded Abstracts 2015; Society of Exploration Geophysicists: Houston, TX, USA, 2015; pp. 4615–4619. [Google Scholar]
- Vrolijk, J.-W.; Blacquiere, G. Source deghosting of coarsely sampled common-receiver data using a convolutional neural network. Geophysics 2021, 86, V185–V196. [Google Scholar] [CrossRef]
- de Jonge, T.; Vinje, V.; Poole, G.; Zhao, P.; Iversen, E. Deghosting dual-component streamer data using demigration-based supervised learning. Geophys. Prospect. 2023, 72, 68–91. [Google Scholar] [CrossRef]
- Almuteri, K.; Sava, P. A convolutional neural network approach for ghost removal. In Proceedings of the SEG International Exposition and Annual Meeting, Denver, CO, USA, 26 September–1 October 2021; p. D011S110R001. [Google Scholar]
- Poole, G. Pre-migration receiver de-ghosting and re-datuming for variable depth streamer data. In Proceedings of the SEG International Exposition and Annual Meeting, Houston, TX, USA, 22–27 September 2013; p. SEG-2013-0541. [Google Scholar]
- Curtis, A.; Gerstoft, P.; Sato, H.; Snieder, R.; Wapenaar, K. Seismic interferometry—Turning noise into signal. Lead. Edge 2006, 25, 1082–1092. [Google Scholar] [CrossRef]
- Liu, L.; Liu, Y.; Li, T.; He, Y.; Du, Y.; Luo, Y. Inversion of vehicle-induced signals based on seismic interferometry and recurrent neural networks. Geophysics 2021, 86, Q37–Q45. [Google Scholar] [CrossRef]
- Bleistein, N. Mathematical Methods for Wave Phenomena; Academic Press: Cambridge, MA, USA, 2012. [Google Scholar]
- Nie, W.; Xiang, F.; Li, B.; Wen, X.; Nie, X. Prestack Seismic Inversion via Nonconvex L1-2 Regularization. Appl. Sci. 2021, 11, 12015. [Google Scholar] [CrossRef]
- Liu, L.; Ma, J.; Plonka, G. Sparse graph-regularized dictionary learning for suppressing random seismic noise. Geophysics 2018, 83, V215–V231. [Google Scholar] [CrossRef]
- Hamid, H.; Pidlisecky, A. Multitrace impedance inversion with lateral constraints. Geophysics 2015, 80, M101–M111. [Google Scholar] [CrossRef]
- Shao, O.; Wang, L.; Hu, X.; Long, Z. Seismic denoising via truncated nuclear norm minimization. Geophysics 2021, 86, V153–V169. [Google Scholar] [CrossRef]
- Zhang, W.; Fu, L.; Zhang, M.; Cheng, W. 2-D seismic data reconstruction via truncated nuclear norm regularization. IEEE Trans. Geosci. Remote Sens. 2020, 58, 6336–6343. [Google Scholar] [CrossRef]
- Elad, M. Sparse and Redundant Representations: From Theory to Applications in Signal and Image Processing; Springer: Berlin/Heidelberg, Germany, 2010; Volume 2. [Google Scholar]
- Donoho, D.L.; Maleki, A.; Montanari, A. Message-passing algorithms for compressed sensing. Proc. Natl. Acad. Sci. USA 2009, 106, 18914–18919. [Google Scholar] [CrossRef] [PubMed]
- Davis, G.; Mallat, S.; Avellaneda, M. Adaptive greedy approximations. Constr. Approx. 1997, 13, 57–98. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acquisition System | Parameter Setting |
|---|---|
| Source | 271 |
| Receivers | 271 |
| Trace spacing | 20 m |
| Shot spacing | 20 m |
| Time sampling | 2 ms |
| Total time | 1.6 s |
| Receiver depth | 20 m |
| Acquisition System | Parameter Setting |
|---|---|
| Source | 371 |
| Receivers | 371 |
| Trace spacing | 25 m |
| Shot spacing | 25 m |
| Time sampling | 4 ms |
| Total time | 2.4 s |
| Receiver depth | 7 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Wang, D.; Hu, B.; Gong, X.; Chen, Y.; Zhang, Y. Multi-Shot Simultaneous Deghosting for Virtual-Shot Gathers via Integrated Sparse and Nuclear Norm Constraint Inversion. Remote Sens. 2024, 16, 2075. https://doi.org/10.3390/rs16122075
Zhang J, Wang D, Hu B, Gong X, Chen Y, Zhang Y. Multi-Shot Simultaneous Deghosting for Virtual-Shot Gathers via Integrated Sparse and Nuclear Norm Constraint Inversion. Remote Sensing. 2024; 16(12):2075. https://doi.org/10.3390/rs16122075
Chicago/Turabian StyleZhang, Junming, Deli Wang, Bin Hu, Xiangbo Gong, Yifei Chen, and Yang Zhang. 2024. "Multi-Shot Simultaneous Deghosting for Virtual-Shot Gathers via Integrated Sparse and Nuclear Norm Constraint Inversion" Remote Sensing 16, no. 12: 2075. https://doi.org/10.3390/rs16122075