
Prediction of Deformation in Expansive Soil Landslides Utilizing AMPSO-SVR


Abstract
1. Introduction
2. Displacement Prediction Model of Expansive Soil Landslides
2.1. Displacement Time Series Theory
2.2. Complete Ensemble Empirical Mode Decomposition with Adaptive Noise
2.3. Support Vector Regression (SVR)
2.4. Adaptive Mutation Particle Swarm Optimization (AMPSO)
2.5. The Flow of Prediction Method
2.6. Evaluation Indicators for Displacement Prediction
3. Experimental Analysis—Expansive Soil Landslide on Chongai Highway in Ningming
3.1. Landslide Overview
3.2. Deformation Characteristics
4. Displacement Prediction
4.1. Extraction and Prediction of Trend Displacement
4.2. Extraction and Prediction of Fluctuation Term Displacement
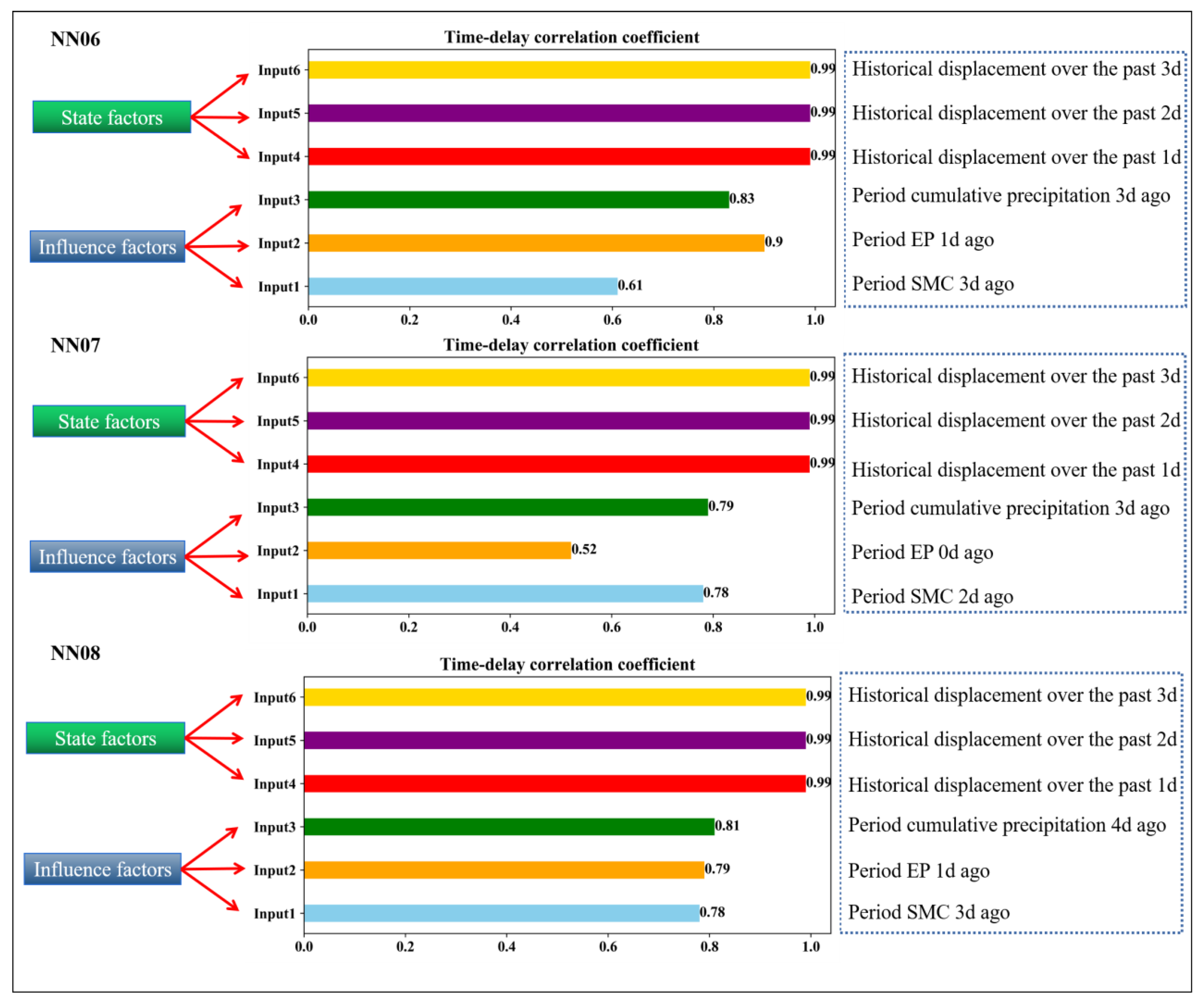
4.2.1. Determination of Key Disaster-Inducing Factors
4.2.2. Time Lag Correlation
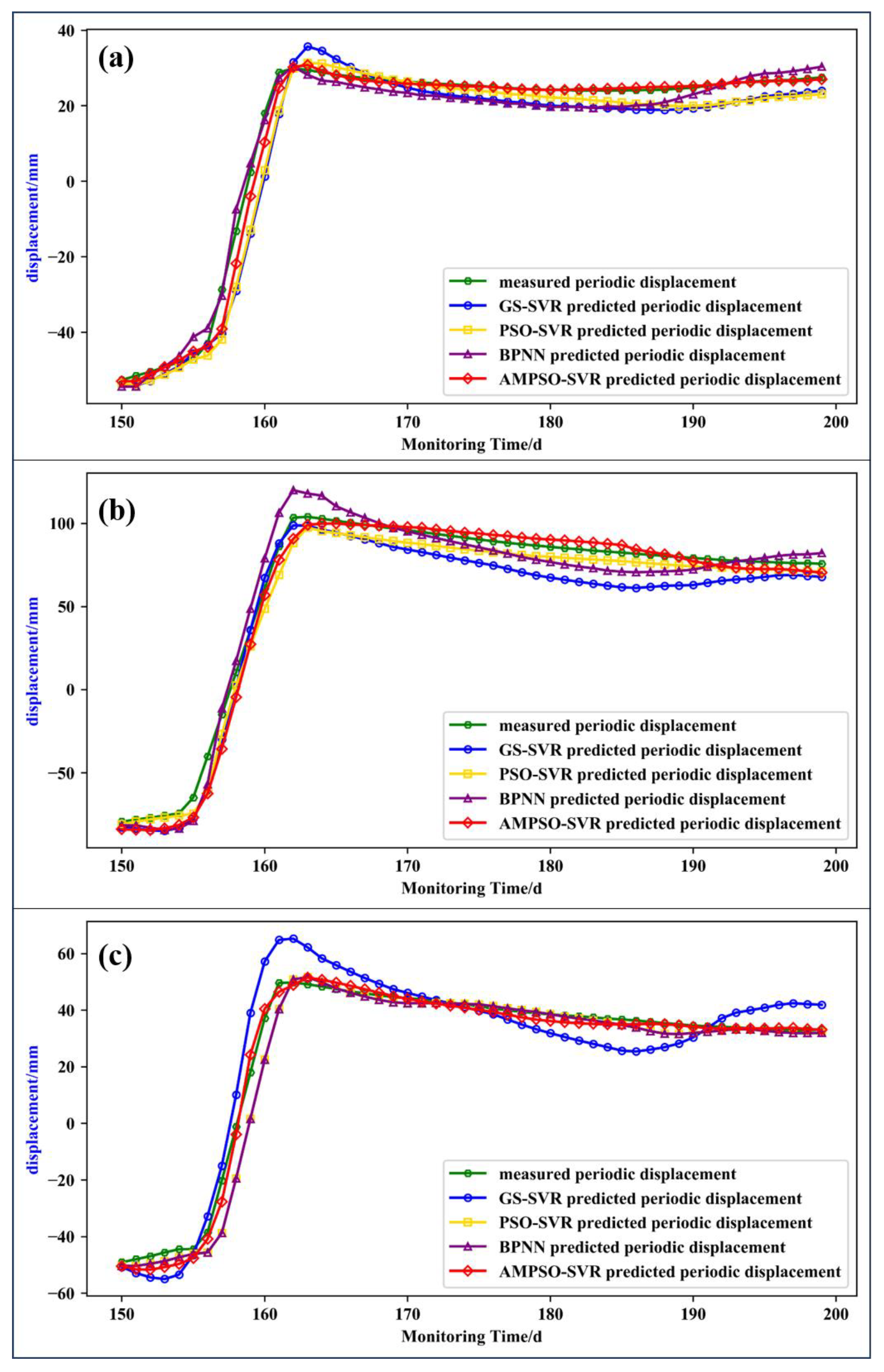
4.2.3. Fluctuation Term Displacement Prediction
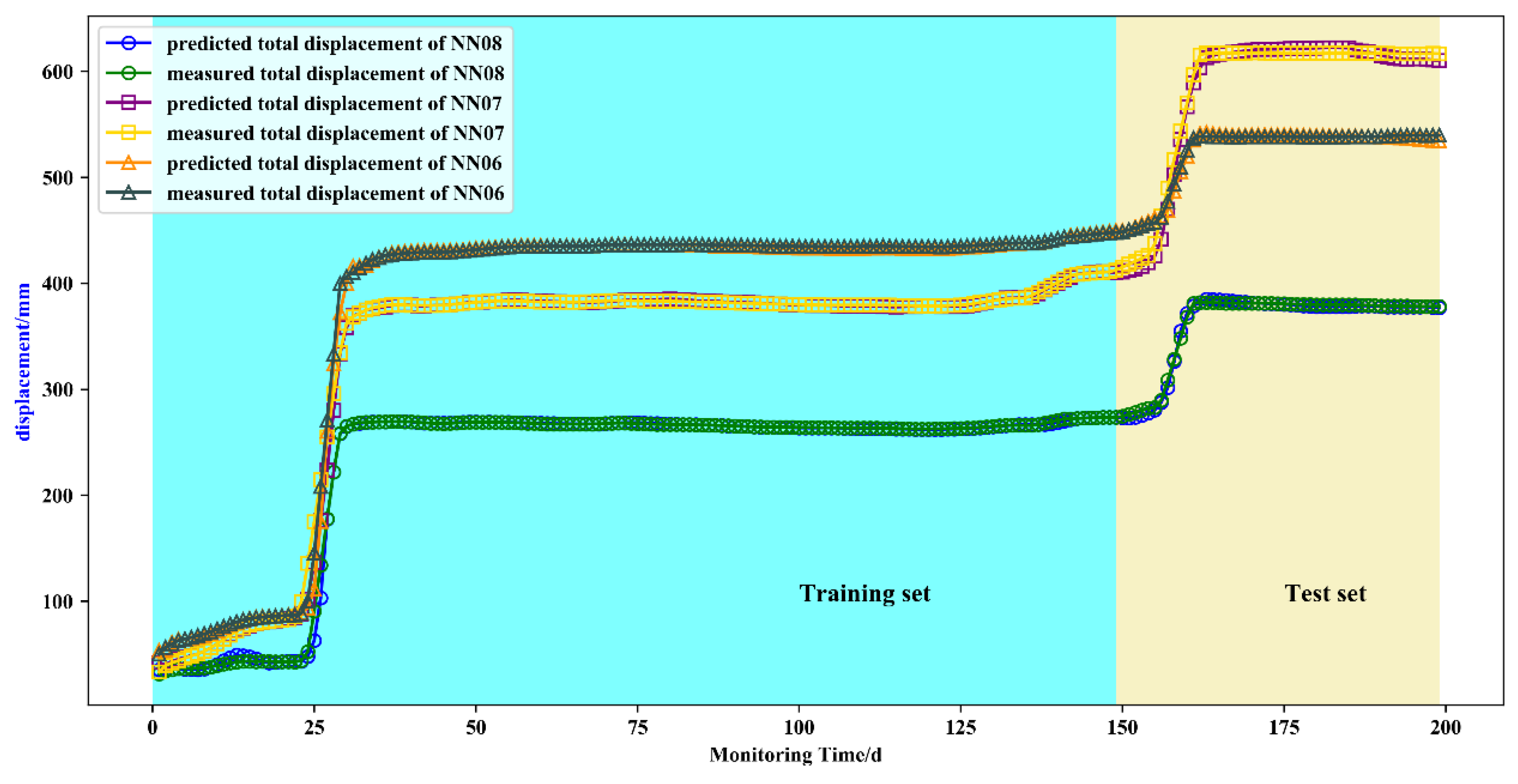
4.3. Total Displacement Prediction and Accuracy Analysis
5. Conclusions
- (1)
- The characteristics of the “ladder-type” deformation of expansive soil landslides due to their non-periodic repeated instability were recorded and analyzed. The important relationship between key influencing factors such as earth pressure, soil moisture content, and cumulative precipitation with this step displacement were also revealed. Meanwhile, the lag response time of landslide displacement and influencing factors was determined. The GNSS displacement of monitoring points at different parts of the Ningming expansive soil slope was different from the lag time of the influencing factors. The average GNSS displacement lagged behind rainfall, soil moisture content, and earth pressure at 3 d, 2 d, and 1 d, respectively. The GNSS displacement sequence corrected by the lag period was in good agreement with the multi-source influence factor sequence.
- (2)
- The displacements of the trend term and fluctuation term were obtained by CEEMDAN decomposition. The displacements of the trend term were predicted by cubic polynomial fitting. Taking into account the non-periodic step of the fluctuation displacement of the expansive soil landslide that was affected by multiple external factors, a dynamic prediction model driven by multi-factors was established to predict the displacement of the fluctuation term. The prediction results were in good agreement with the obtained measurements. The average RMSE predicted by AMPSO-SVR was 3.94 mm, compared with the results of the GS-SVR, PSO-SVR, and BPNN models, it was increased by 58.3%, 38.1%, and 25.2%, respectively.
- (3)
- The proposed model was feasible and reliable in the prediction of step-like and non-periodic expansive soil landslides, and the stepped deformation and external multiple factors could be modeled efficiently, which gives it the potential to be applied to other expansive soil landslide deformation predictions.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zheng, J.L.; Zhang, R. Highway Subgrade Construction in Expansive Soil Areas. J. Mater. Civ. Eng. 2009, 21, 154–162. [Google Scholar] [CrossRef]
- Puppala, A.J.; Congress, S.S.C.; Banerjee, A. Research Advancements in Expansive Soil Characterization, Stabilization and Geoinfrastructure Monitoring. In Frontiers in Geotechnical Engineering: Developments in Geotechnical Engineering; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar] [CrossRef]
- Chen, Z.; Huang, G.W.; Xie, W. GNSS Real-Time Warning Technology for Expansive Soil Landslide—A Case in Ningming Demonstration Area. Remote Sens. 2023, 15, 2772. [Google Scholar] [CrossRef]
- Huang, G.W.; Chen, Z.; Xu, Y.F. GNSS Real-time Monitoring Technology of Expansive Soil Slope. Acta Geod. Cartogr. Sin. 2023, 52, 1873–1882. [Google Scholar]
- Chen, Z.; Huang, G.W.; Bai, Z.W.; Zhang, S.C. Monitoring of expansive soil slope based on low-cost millimeter-sized GNSS technology. J. Cent. South Univ. (Sci. Technol.) 2022, 53, 214–224. [Google Scholar]
- Huang, G.W.; Du, S.; Wang, D. GNSS techniques for real-time monitoring of landslides: A review. Satell. Navig. 2023, 4, 5. [Google Scholar] [CrossRef]
- Zhang, Q.; Bai, Z.W.; Huang, G.W.; Du, Y.; Wang, D. Review of GNSS Landslide Monitoring and Early Warning. Acta Geod. Et Cartogr. Sin. 2022, 51, 1985–2000. [Google Scholar]
- Wang, D.; Huang, G.W.; Du, Y. Stability analysis of reference station and compensation for monitoring stations in GNSS landslide monitoring. Satell. Navig. 2023, 4, 29. [Google Scholar] [CrossRef]
- Miao, L.C.; Liu, S.Y.; Lai, Y.M. Research of soil–water characteristics and shear strength features of Nanyang expansive soil. Eng. Geol. 2002, 65, 261–267. [Google Scholar] [CrossRef]
- Ma, Z.J.; Mei, G. Machine learning for landslides prevention: A survey. Neural Comput. Appl. 2020, 33, 10881–10907. [Google Scholar] [CrossRef]
- Shi, B.; Jiang, H.T.; Liu, Z.B. Engineering geological characteristics of expansive soils in China. Eng. Geol. 2002, 67, 63–71. [Google Scholar] [CrossRef]
- Dai, Z.; Chen, S.; Li, J. The failure characteristics and evolution mechanism of the expansive soil trench slope. 2nd Pan-Am. Conf. Unsaturated Soils 2017, 2017, 196–205. [Google Scholar]
- Zhu, X. A Hybrid Machine Learning Model Coupling Double Exponential Smoothing and ELM to Predict Multi-Factor Landslide Displacement. Remote Sens. 2022, 14, 3384. [Google Scholar] [CrossRef]
- Gao, W. Landslide prediction based on a combination intelligent method using the GM and ENN: Two cases of landslides in the Three Gorges Reservoir, China. Landslides 2020, 17, 111–126. [Google Scholar] [CrossRef]
- Yang, B.B. Time series analysis and long short-term memory neural network to predict landslide displacement. Landslides 2019, 16, 677–694. [Google Scholar] [CrossRef]
- Miao, F.S.; Wu, Y.P. Prediction of landslide displacement with step-like behavior based on multialgorithm optimization and a support vector regression model. Landslides 2017, 15, 475–488. [Google Scholar] [CrossRef]
- Xun, Z.; Wen, J.Y.; Chao, W. Prediction Study of Wind Energy Based on AMPSO Algorithm and Neural Network. East China Electric Power. 2011, 39, 0797–0802. [Google Scholar]
- Cervantes, A.; Galvan, I.M.; Isasi, P. AMPSO: A New Particle Swarm Method for Nearest Neighborhood Classification. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 2009, 39, 1082–1091. [Google Scholar] [CrossRef]
- Chae, B.G.; Park, H.J. Landslide prediction, monitoring and early warning: A concise review of state-of-the-art. Geosci. J. 2017, 21, 1033–1070. [Google Scholar] [CrossRef]
- Wei, X.Y.; Gao, W.W. Forecasting the Failure Time of an Expansive Soil Slope Using Digital Image Correlation under Rainfall Infiltration Conditions. Water 2023, 15, 1328. [Google Scholar] [CrossRef]
- Zhang, Z.; Jiang, Z.; Meng, X. Research on prediction method of api based on the enhanced moving average method. In Proceedings of the International Conference on Systems and Informatics (ICSAI2012), Yantai, China, 19–20 May 2012; pp. 2388–2392. [Google Scholar]
- Huang, Y.; Zhao, L. Review on landslide susceptibility mapping using support vector machines. Catena 2018, 165, 520–529. [Google Scholar] [CrossRef]
- Smola, A.J.; Schölkopf, B. A tutorial on support vector regression. Stat. Comput. 2004, 14, 199–222. [Google Scholar] [CrossRef]
- Jain, M.; Saihjpal, V.; Singh, N. An overview of variants and advancements of PSO algorithm. Appl. Sci. 2022, 12, 8392. [Google Scholar] [CrossRef]
- XU, Y.F.; Cheng, Y.; Tang, H.H. Failure characteristics of expansive soil slope and standardization of slope slide prevention by geotextile bag. J. Cent. South Univ. (Sci. Technol.) 2022, 53, 1–20. [Google Scholar]
- Zhang, Y.; Chen, X.; Liao, R. Research on displacement prediction of step-type landslide under the influence of various environmental factors based on intelligent WCA-ELM in the Three Gorges Reservoir area. Nat. Hazards 2021, 107, 1709–1729. [Google Scholar] [CrossRef]
- Liu, Y.L.; Li, W.Q.; Zhang, J.W. Research on lateral earth pressure acting on retaining wall in expansive soil considering influences of environmental load. J. Cent. South Univ. (Sci. Technol.) 2022, 53, 150–159. [Google Scholar]
- Li, T.; Kong, L.; Guo, A. The deformation and microstructure characteristics of expansive soil under freeze–thaw cycles with loads. Cold Reg. Sci. Technol. 2021, 192, 103393. [Google Scholar] [CrossRef]
- Wang, Y.; Tang, H.; Huang, J. A comparative study of different machine learning methods for reservoir landslide displacement prediction. Eng. Geol. 2022, 298, 106544. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Monitoring Points | R2 | RMSE (mm) | MAPE | Model |
|---|---|---|---|---|
| NN06 | 0.9524 | 5.9 | 0.3131 | GS-SVR |
| 0.9626 | 5.2 | 0.2661 | PSO-SVR | |
| 0.9864 | 3.1 | 0.1273 | BPNN | |
| 0.9907 | 2.6 | 0.1017 | AMPSO-SVR | |
| NN07 | 0.9459 | 13.2 | 0.1793 | GS-SVR |
| 0.9821 | 7.6 | 0.1124 | PSO-SVR | |
| 0.9776 | 8.9 | 0.1254 | BPNN | |
| 0.9857 | 6.6 | 0.1181 | AMPSO-SVR | |
| NN08 | 0.9239 | 8.5 | 0.3766 | GS-SVR |
| 0.9697 | 5.3 | 0.3871 | PSO-SVR | |
| 0.9872 | 3.8 | 0.2135 | BPNN | |
| 0.9934 | 2.5 | 0.0964 | AMPSO-SVR |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Z.; Huang, G.; Zhang, Y. Prediction of Deformation in Expansive Soil Landslides Utilizing AMPSO-SVR. Remote Sens. 2024, 16, 2483. https://doi.org/10.3390/rs16132483
Chen Z, Huang G, Zhang Y. Prediction of Deformation in Expansive Soil Landslides Utilizing AMPSO-SVR. Remote Sensing. 2024; 16(13):2483. https://doi.org/10.3390/rs16132483
Chicago/Turabian StyleChen, Zi, Guanwen Huang, and Yongzhi Zhang. 2024. "Prediction of Deformation in Expansive Soil Landslides Utilizing AMPSO-SVR" Remote Sensing 16, no. 13: 2483. https://doi.org/10.3390/rs16132483
APA StyleChen, Z., Huang, G., & Zhang, Y. (2024). Prediction of Deformation in Expansive Soil Landslides Utilizing AMPSO-SVR. Remote Sensing, 16(13), 2483. https://doi.org/10.3390/rs16132483