Abstract
With the rapid development of the Internet of Things (IoT), the positioning accuracy requirement of the IoT is increasing, especially for those applications without Global Navigation Satellite System (GNSS) signals. Ultra-Wideband (UWB) is treated as a high-accuracy positioning method that can be utilized in GNSS-blocked environments. However, UWB’s performance is still limited when it is applied in practical applications due to errors such as Non-Line-of-Sight (NLOS) errors, multipath errors, and systematic errors in UWB range values. To constrain the impacts of these mentioned errors on UWB positioning accuracy, this work proposes a novel UWB positioning model by introducing a UWB ranging offset calibration algorithm and a moving average filter into a robust extended Kalman filter. In such a UWB positioning model, the ranging offset calibration algorithm is employed to limit the infuence of UWB systematic errors, and the prior residual-based IGG-III weighting model is used to restrain the impacts of NLOS and multipath errors. The moving average filter is to further decrease the impact of the measuring noise on UWB positioning parameter estimation. To investigate the effectiveness of this proposed method, three sets of UWB experiments are arranged in three classic user environments. The experimental results show that (1) after applying the UWB ranging offset calibration algorithm, UWB positioning accuracies in classic environments, namely indoor condition, outdoor condition, and transition area are increased by 50.3%, 20.2%, and 46.9%, respectively; (2) the moving average filter can effectively improve the smoothness of UWB positioning results in terms of standard deviation; (3) the prior residual-based robust theory brings about 49.4% and 25.2% positioning improvements to horizontal and vertical components under poor measurement quality conditions, but such improvements are rather slight when there are good-quality measurements; and (4) after applying the ranging offset calibration algorithm and moving average filter to the robust EKF together, the elevation accuracy of UWB positioning is increased by 67.1%, 22.2%, and 50.5%, respectively, in the three classic user environments.
1. Introduction
The development of the Internet of Things (IoT) brings a requirement for higher positioning accuracy in both indoor and outdoor environments. Currently, the Global Navigation Satellite System (GNSS) is a helpful system to provide positioning services for users in outdoor scenes with different positioning accuracy levels (meter level, decimeter level, centimeter level, even millimeter level), which can satisfy users’ positioning requirements in daily life. However, the precondition for using GNSS is that enough available GNSS satellites (at least four satellites for a single GNSS system, i.e., GPS (Global Positioning System)) are observed at each epoch [1]. However, such a precondition for the usage of GNSS in indoor environments is an unreasonable expectation because of the blocked GNSS signals [2], which makes GNSS unsuitable for indoor positioning [3]. For example, He et al. (2017) tried to realize precision navigation and positioning in a library in Shanghai through GPS/BDS (Beidou Navigation Satellite System), and it was verified that the GPS/BDS positioning structure could not meet the accuracy requirements of indoor positioning [4].
To provide positioning services in indoor conditions, positioning technologies such as Wi-Fi, Bluetooth Low Energy (BLE), Radio Frequency Identification (RFID), ZigBee, Ultra-Wideband (UWB), pseudolites, Global System for Mobile Communication (GSM), cameras, LED lights, ultrasound, gyroscopes, accelerometers, magnetometers, etc., are utilized currently [5]. Among these existing indoor positioning technologies, UWB is based on a signal with a large frequency bandwidth (>500 MHz) for ranging, with the significant characteristics of a high transmission rate, low consumption, and strong anti-interference [6]. The pulse-based distance measuring accuracy is highly related to the bandwidth. Applying a large frequency bandwidth can provide higher temporal and spatial ranges. Currently, UWB is being widely used in indoor positioning [7]. A conventional UWB positioning algorithm is based on the spatial resection principle [8], which is realized by using the distances between UWB base stations and the user tag [9]. The coordinates of the user tag are calculated with the preconditions of the given base stations’ coordinates and the measured distances [10]. Such a method can provide high-accuracy positioning results under line-of-sight conditions, but its signal propagation is susceptible to the external environment, which leads to gross errors in the range value and ultimately decreases the positioning accuracy [11]. UWB positioning is realized by using short pulse signals to measure the messages such as arrival time, arrival angle, and signal strength [12]. However, these short pulse signals are susceptible to multipath and Non-Line-of-Sight (NLOS) errors, which are resulting in positioning accuracy degradation [13].
To minimize the influence of NLOS errors on UWB positioning accuracy, scholars have conducted some studies in the past. For example, the Kalman filter (KF) instead of Least Square (LS) is used to estimate parameters under the assumption that the residuals obey the Gaussian distribution with a mean value of zero [14]. According to the conclusion in [15], the Kalman filter can partially limit the impacts of multipath and NLOS errors. From the works at present, there are three main approaches for handling the two errors. The first one is to directly identify LOS (Line-of-Sight) signals and NLOS signals. In [16], an LOS/NLOS identification scheme based on a hybrid method of deep learning and transfer learning is provided. However, the NLOS signal recognition model based on deep learning is often only applicable in a similar environment and is hardly applied in a changing environment [17]. The second approach is realized by adjusting the weight of the NLOS error-polluted observations, but to eliminate the NLOS error. In this approach, two stages, namely NLOS identification and weight function construction, are included. As shown in [18], the identification of the NLOS error is accomplished by setting a threshold for residuals. Then, the IGGIII model is introduced to reset the weight of these NLOS error-polluted observations, which effectively enhances the robustness of the positioning algorithm. The work in [19] presented the existence of NLOS-caused ranging errors and evaluated the influence of the NLOS error on UWB ranging accuracy through a real indoor field test. This leads to the third approach to reduce the impact of the NLOS error, which estimates the influence of the NLOS on the ranging value by parameter estimation and directly corrects the ranging value before position estimation [20]. In the study of [20], a convolutional neural network-based method is applied to estimate the UWB distance error caused by the NLOS error without prior knowledge of the LOS and NLOS. Nevertheless, such an estimation of ranging deviation based on neural networks is usually sensitive to the environment and needs complex migration algorithms, which makes it hard to deal with complex and variable environments in field applications [21]. In addition to the influence of the NLOS error and multipath error on the UWB ranging value, the measuring noise and UWB ranging offset will also influence the UWB ranging value. For example, even in the LOS and open observation scenarios, UWB ranging residuals still do not obey the zero-centered Gaussian distribution [22]. In the study of [23], the ranging calibration-influencing factors such as the received power level, the ranging distance, the environmental conditions, and LOS/NLOS were evaluated. The experimental results indicated that the received power level and the ranging distance present a notable effect on the ranging error. To improve the smoothness of UWB positioning results, the work in [24] used the moving average filter to smooth the UWB ranging values, resulting in smooth UWB positioning solutions in indoor environments. Based on this work and furtherly limiting the impacts of poor-quality UWB measurements at previous epochs on the moving average filter, this paper constructs a selective moving average filter based on the recognition results of NLOS and/or multipath errors to smooth the UWB ranging value reliably.
With the development of multi-sensor integration, sensors like Inertial Measurement Units (IMU) and GNSS are used to enhance low-accuracy range detection and positioning accuracy upgradation. For example, the work of [18] integrated UWB ranges with IMU data to predict the positioning results in the areas affected by NLOS errors, which weakens the impact of the NLOS on UWB positioning and provides continuous positioning results in complex environments. The IMU-based Pedestrian Dead Reckoning (PDR) was integrated with UWB [25], which can significantly improve the UWB accuracy of positioning in both LOS and NLOS environments. The work in [26] proposed a tight integration among GNSS, UWB, and visual–inertial odometry to improve the accuracy and reliability of the autonomous vehicle’s seamless positioning in challenging environments.
According to the existing works on UWB positioning, researchers pay attention to improving the UWB positioning accuracy by reducing the influences of NLOS and/or multipath errors. However, the UWB ranging based on the short pulse signal measuring leads to a ranging system offset, which may be different for each UWB tag. Such a UWB base–tag pair-dependent offset actually cannot be estimated as parameters in the UWB positioning filter, which will lead to UWB positioning accuracy loss. Therefore, this paper provided a reliable UWB positioning model based on the augmentations of a ranging offset calibration, a prior residual-based robust EKF, and a moving average filter. The main contributions of this paper can be summarized as follows:
- We introduced a ranging offset calibration and moving average filter into the prior residual-based robust extended Kalman filter, which can provide higher accuracy and reliability for UWB positioning solutions.
- This paper has provided a convenient ranging offset calibration scheme, which can effectively improve the positioning accuracy only by using a short period of static UWB observation.
- This paper constructs a robust weight function-based selective moving average filter to smooth the UWB results, by which the UWB positioning accuracy will be hardly influenced by the NLOS-polluted UWB ranges at previous epochs.
- Three sets of UWB datasets from classic user scenarios (indoor, outdoor, and transform areas) are used to investigate the performance of the presented UWB positioning method.
The structure of this paper is arranged as follows: In the Section 2, the mathematical models of the UWB system ranging offset calibration method, the moving average filter model, and the robust EKF based on predictive residuals are presented in detail. Then, the experimental methods and data analysis/discussion follow in the Section 3. Finally, the Section 5 summarizes the conclusions of this contribution.
2. Methods
In this section, mathematical models including conventional UWB positioning functions, the UWB system ranging offset calibration method, the moving average filter model, and the prior residual-based robust EKF are presented in detail.
2.1. Conventional UWB Positioning Model
The extended Kalman filter, which is used under the assumptions of a Gaussian distribution and independent observations, is widely adopted for parameter estimation. The state function and observation function for the EKF-based UWB positioning model can be expressed as
where represents the motion state ( and are the position and speed) of the target at k epoch [27]; is the observation vector ( is the UWB range between the th UWB base station and UWB target at the epoch); and are the state noise and the observation noise, which obey the Gaussian distribution with the mean values of zero and the corresponding variances of and .
For the EKF-based UWB positioning model, can be defined as [28]
where () are the coordinates of the ith UWB base station.
Accordingly, the state model of the UWB positioning model based on EKF is realized by
with
where is the predicted motion state of the UWB target at the kth epoch; F is the state transition matrix, which is established based on the constant velocity model [29]; T is the sampling interval.
The observation function of the EKF-based UWB positioning model can be expressed as
with
and
where is calculated by applying Taylor series expansion to Equation (2) around .
2.2. UWB Ranging Offset Calibration Model
As mentioned, UWB positioning results often exhibit a significant offset in the altitude direction. One of the most important facts for this offset is the UWB ranging offset. Therefore, this paper proposes a UWB ranging offset calibration and compensation method to improve UWB positioning accuracy, particularly in the altitude direction. The method can be described as follows. Under static conditions, the true distances between the UWB base stations and UWB tag can be accurately measured by using a total station, marked as a distance vector . The ranging offset value can be expressed as
where represents the UWB ranging value from the tag to the th base node at the epoch, represents the corresponding ranging offset. In this paper, the root mean square of is used to reflect the ranging offset.
where is the total epoch number for static UWB observations.
According to the calibrated ranging offset for each UWB base station, the observations are compensated by
2.3. Prior Residual-Based Robust Algorithm
As is known, multipath and NLOS errors are the two main factors reducing UWB positioning accuracy and robustness in practical positioning services, which makes UWB positioning accuracy difficult to satisfy high-accuracy positioning requirements while suffering poor observation environments; such two factors are usually mixed and appear as a total ranging error. The conventional method to limit the impacts of the mixed multipath and NLOS errors is to introduce a robust theory based on posterior UWB ranging residuals. In such a kind of method, the posterior residuals would be polluted by poor-quality observations. Therefore, this paper presented a robust model based on the prior residuals, which can theoretically avoid the impacts of multipath and NLOS errors at the current epoch completely. Similarly, the standardized prior residuals are used to detect the quality of observations.
where represents the prior residual of the th UWB base station with respect to the epoch, and is the variance of the th epoch based on the prediction residuals.
Then, the IGG-III weighting function [30] is employed to calculate the robustness factor for each UWB ranging observation.
where and are constants, with setting to 1.0–1.5 and to 2.5–8 [31].
The prior variance in the extended Kalman filter is then updated based on the equation of , which can effectively overcome the impact of multipath and NLOS errors on parameter estimation.
2.4. Moving Average Filter Model
Since the smoothness of UWB positioning solutions is influenced by the observing noise, a moving average filter [32] is applied in this work after applying the ranging offset calibration model and the prior residual-based robust algorithm.
where represents the window size of the moving average filter. The window size will determine the influence of the observation data at previous epochs on those of the current epoch. According to statistical results, the selection of the window size should consider the data rate and motion state. Moreover, such a moving average filter decreases the impact of observation noise obeying Gaussian distribution; therefore, there would be no enhancements to the positioning accuracy but it would make the positioning results smoother. However, when there is poor-quality observation (observation noise does not obey the Gaussian distribution) at previous epochs, they could even decrease the accuracy of observation at the current epoch.
2.5. Algorithm Overview
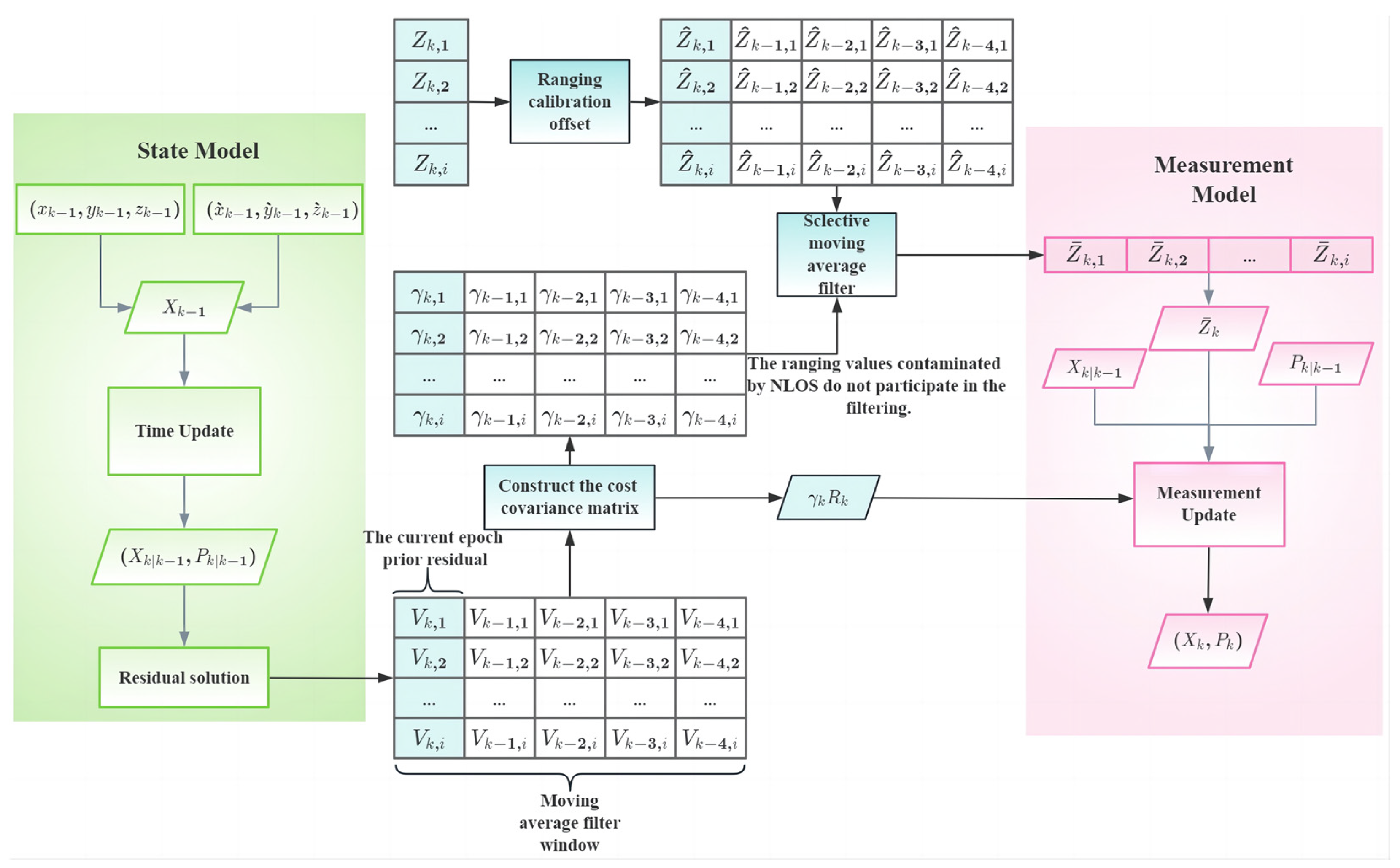
The algorithm used in this paper can be mainly divided into four parts (as shown in Figure 1), namely ranging offset generation, ranging offset calibration, prior residual-based EKF, and moving average filter, respectively. Before applying UWB positioning, static UWB data are collected to calculate the UWB ranging offsets for each base–tag pair based on Equation (10). Then, such ranging offsets are used to compensate for the ranging offsets of the UWB range values based on Equation (11) before they are used to estimate coordinates. After the ranging offset calibration, the prior residual-based robust theory is used to detect the poor-quality UWB measurements based on Equation (13). Finally, the moving average filter is further applied to smooth the noise of these UWB range series without poor-quality ranges. Then, reliable and accurate UWB positioning solutions can be obtained.
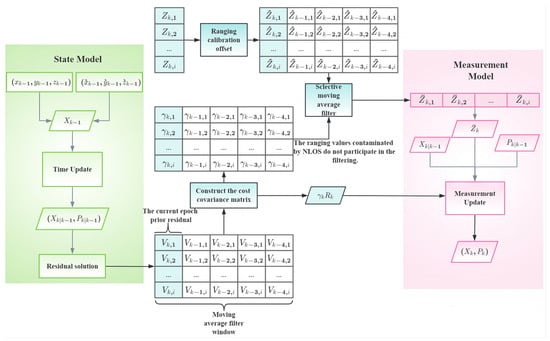
Figure 1.
Algorithm structure of the ranging offset calibration and moving average filter enhanced the reliable UWB positioning model.
3. Experiments and Results
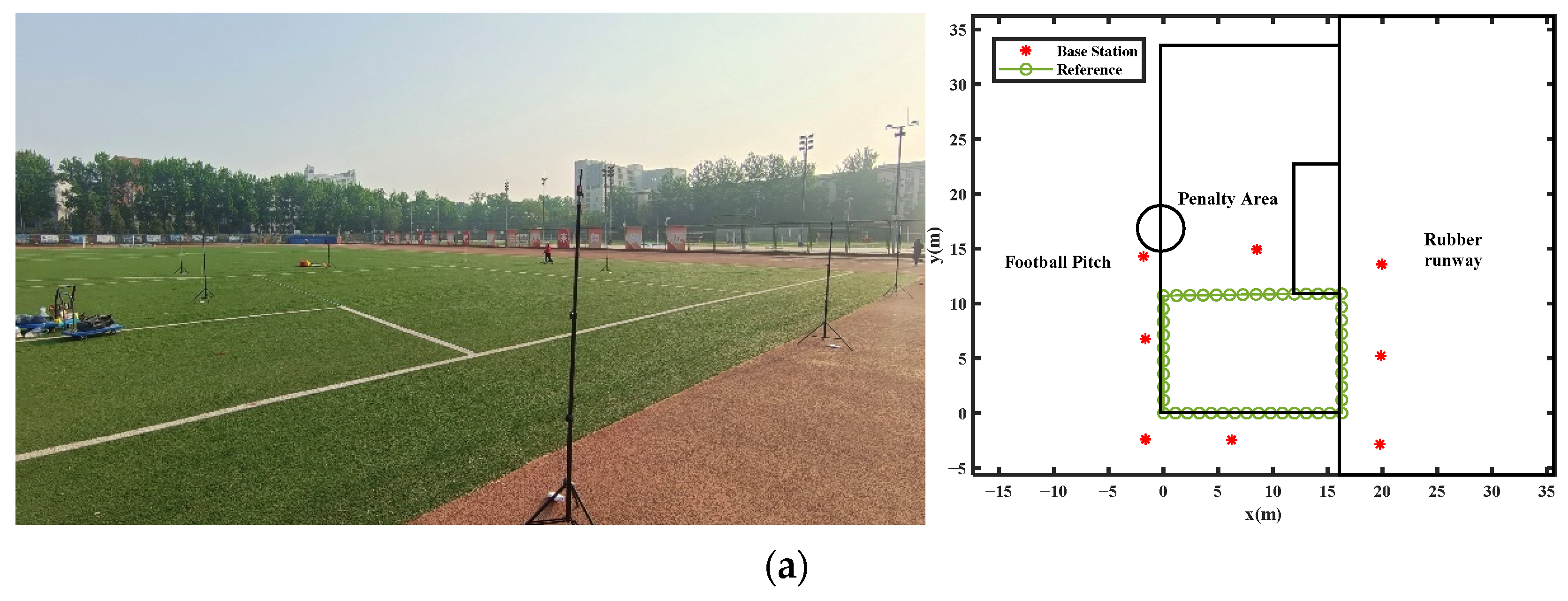
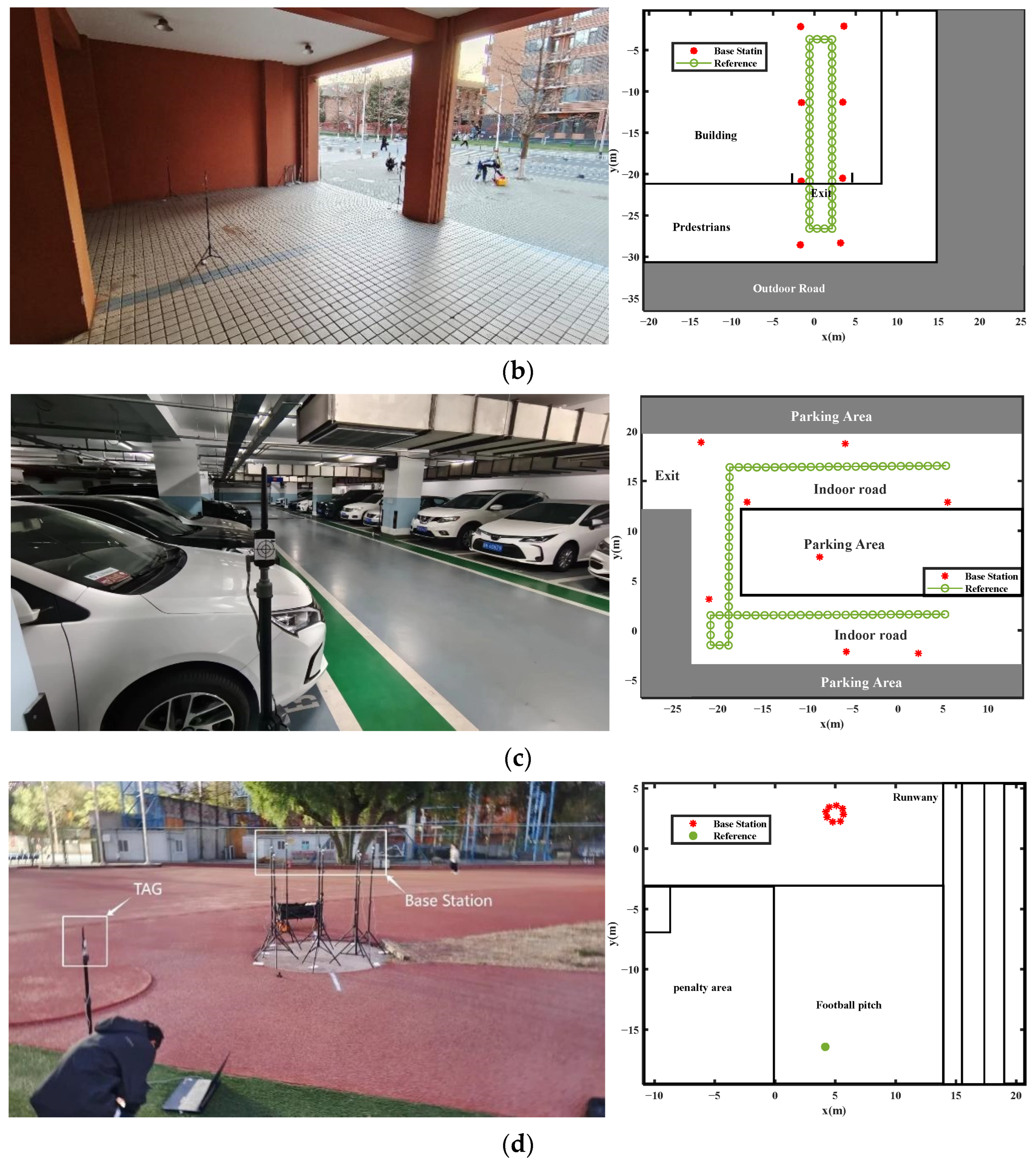
To validate the performance of the proposed method, four sets of UWB/INS (Inertial Navigation System) data collection experiments in different environments were arranged on the campus of the China University of Geosciences Beijing by using the Link Track UWB sensors (Table 1) which is provided by the Nooploop company (https://www.nooploop.com, accessed on 26 April 2024), including a dynamic test in an open outdoor environment (Figure 2a), a dynamic test in an indoor–outdoor transition area (Figure 2b), a dynamic test in a complex indoor environment (Figure 2c), and a static test in an outdoor open-sky environment (Figure 2d). As is shown in Figure 2, the experiment environments and the sketch maps of the exhibition of these four tests are presented. Here, the static experiment was to verify the existence of a UWB ranging error, and the three dynamic tests were to validate the effectiveness of the proposed methods on the UWB positioning performance in terms of accuracy and smoothness. The dynamic test in an outdoor environment is mainly to validate enhancements in the ranging offset calibration and the moving average filter because no NLOS errors exist here. The dynamic tests in the indoor and indoor–outdoor transition area environments are mainly to validate enhancements in the ranging offset calibration and the prior residual-based robust algorithm. During each test, certain epochs at the beginning or end were to collect the static UWB data that were used to calculate the UWB ranging offsets.

Table 1.
Typical specifications of Link Track UWB sensor.
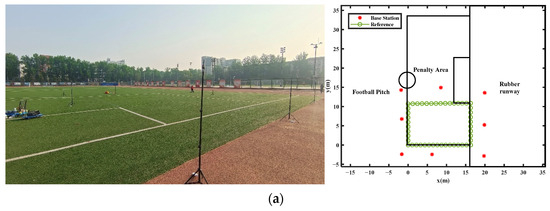
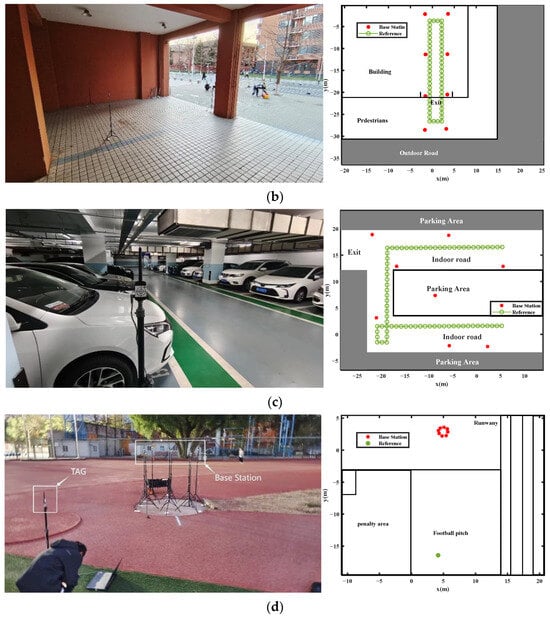
Figure 2.
UWB experiments environments and the sketch maps of the exhibitions. (a) Outdoor environment. (b) Transition area. (c) Indoor environment. (d) UWB ranging offset existence test.
3.1. UWB Positioning Accuracy Evaluation Method
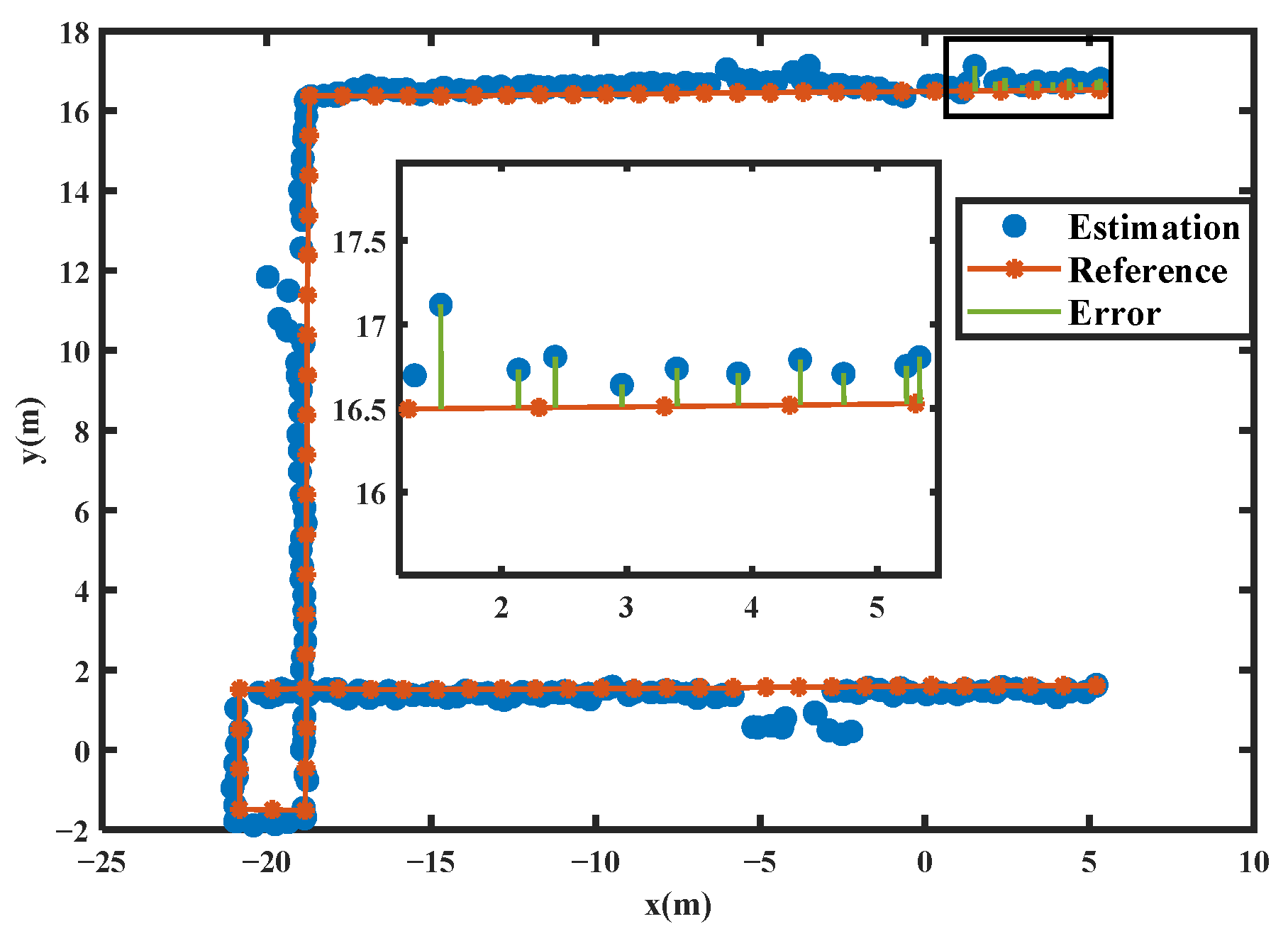
During each test, nine UWB hardware were used, wherein eight of them were used as base stations and marked as A0, A1, A2... A7. The left one was used as a user tag. The distributions of these UWB hardware are shown in Figure 2. As is shown, due to the poor observabilities in the indoor and indoor–outdoor transition area environments, it is impossible to evaluate the UWB positioning accuracy through GNSS solutions. Meanwhile, since the standard deviation obtained based on parameter estimation is an internal coincidence accuracy index, it cannot reflect the actual positioning accuracy. Therefore, this paper uses a total station to measure the 3D coordinates of the reference route with a distance interval of 1 m. Then, the 3D coordinates of the route can be calculated by using linear interpolation. Finally, we evaluate the UWB positioning accuracy by calculating the Euclidean distance from the UWB tag to the measured reference route. The principle of such an accuracy evaluation method of UWB positioning is illustrated in Figure 3. ‘Reference’ represents the coordinates on the reference route, ‘Estimation’ represents the UWB positioning results, and ‘Error’ represents the corresponding Euclidean distance. The position error can be defined by
where denotes the UWB positioning error, and and are the two points on the reference route closest to the UWB positioning result .
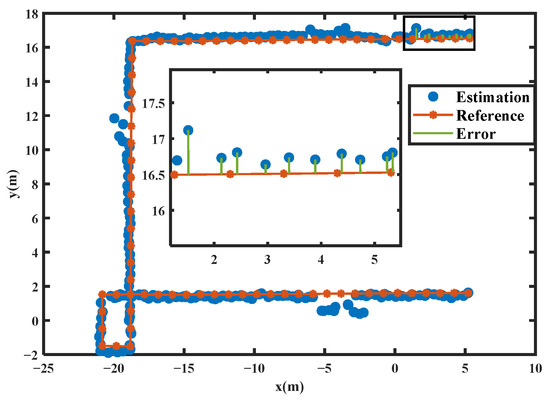
Figure 3.
UWB positioning accuracy evaluation method.
3.2. UWB Ranging Data Quality Analysis
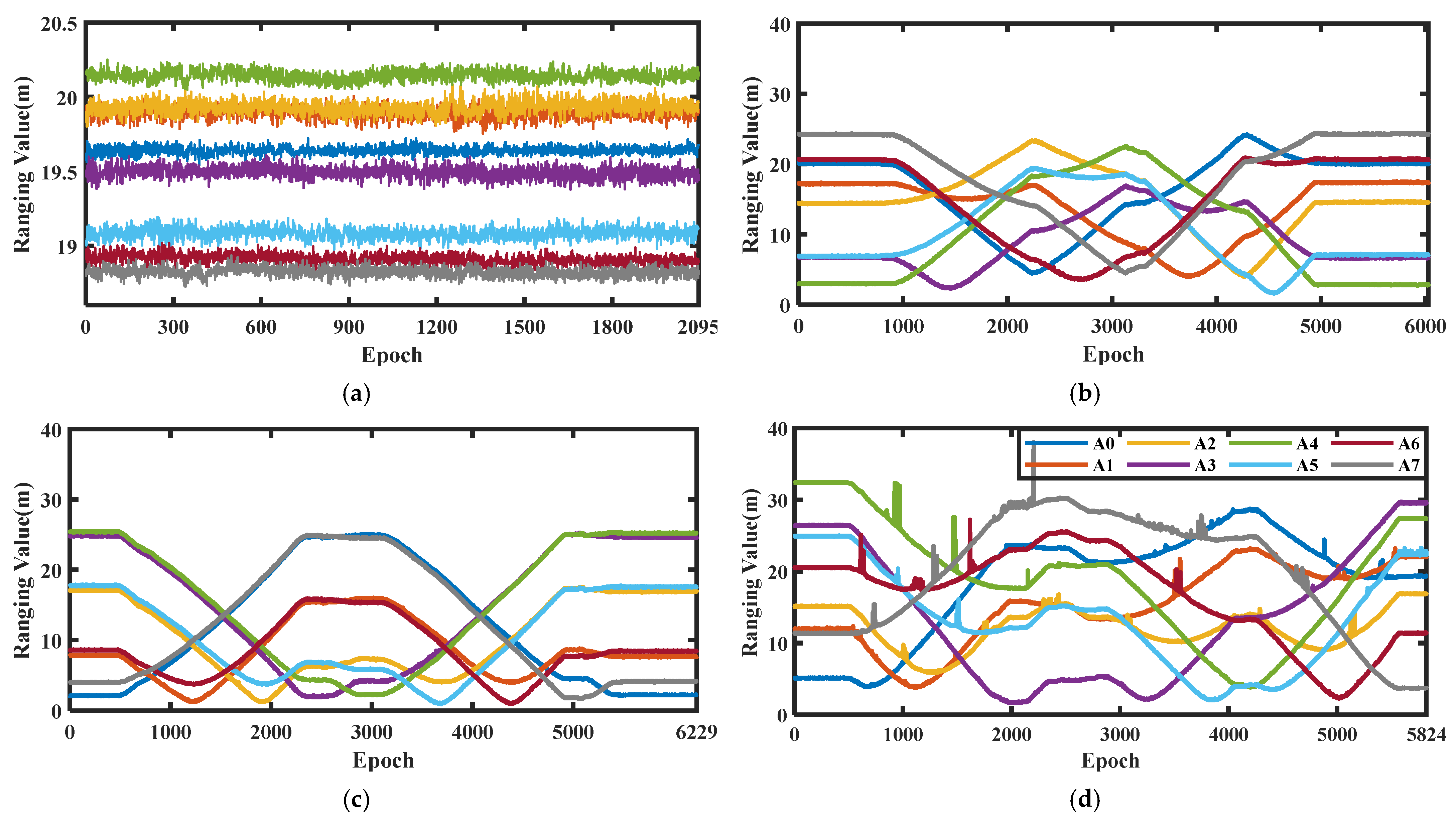
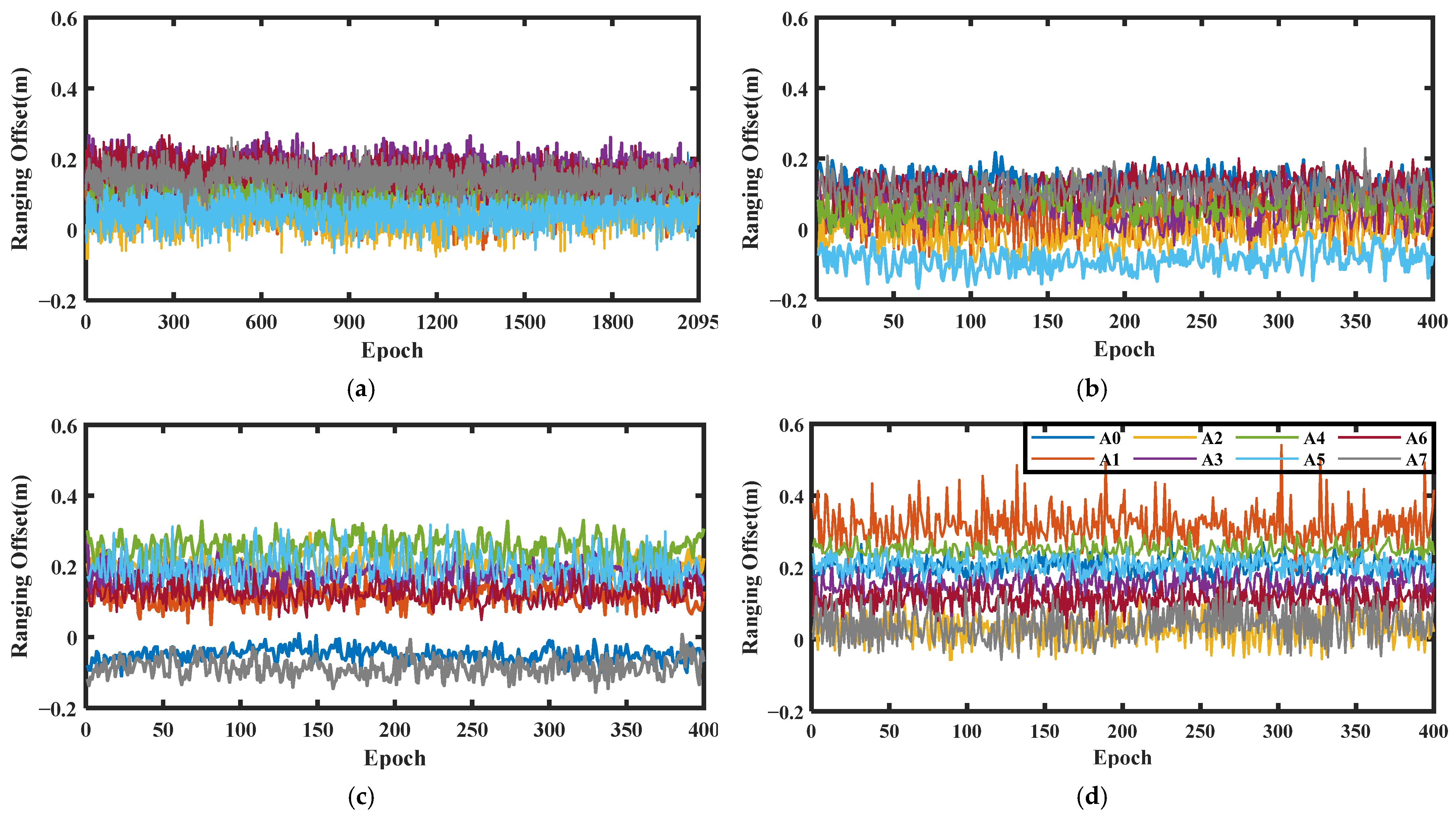
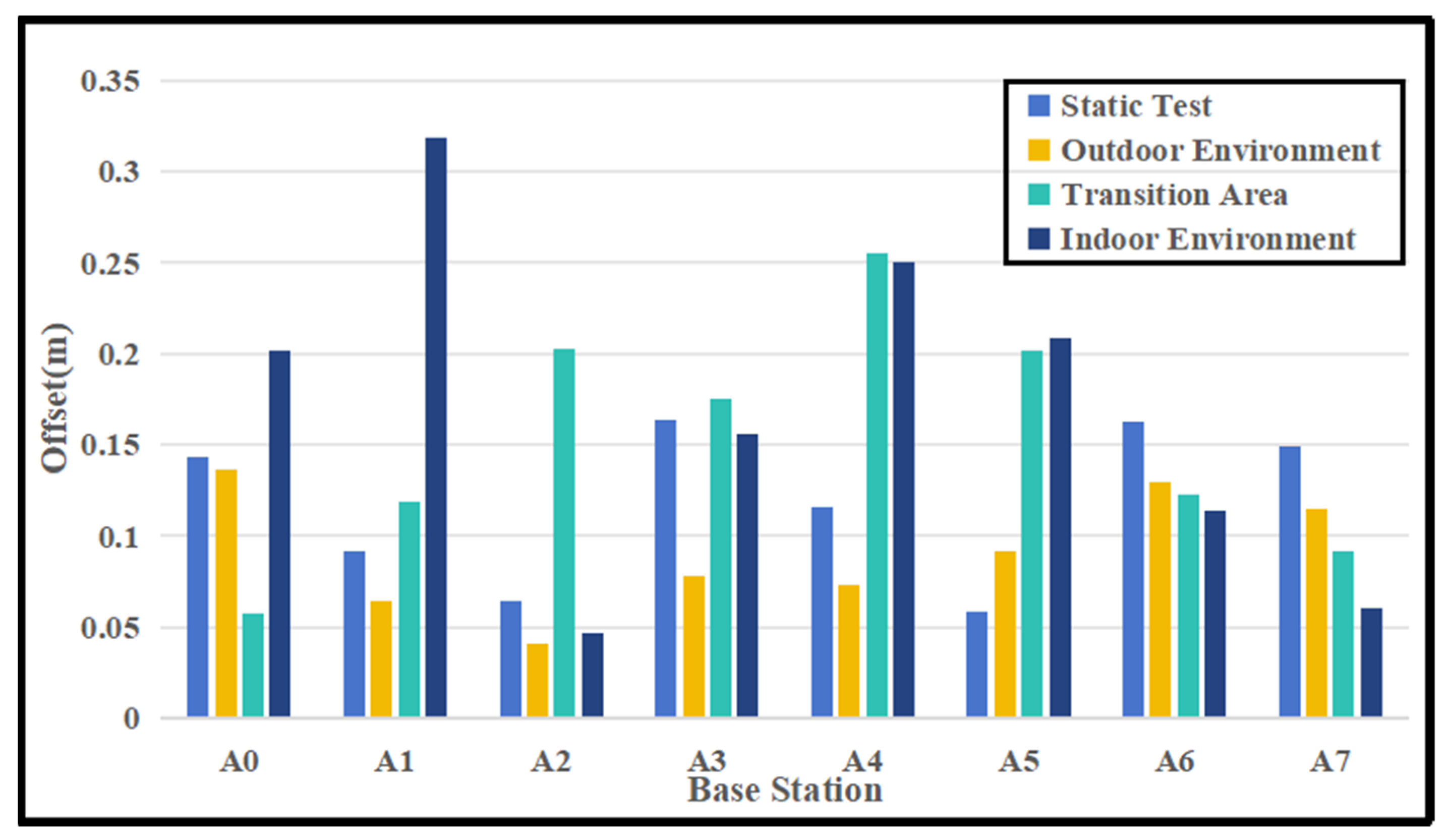
The UWB ranging measurements of the eight base stations in an open outdoor dynamic test, indoor–outdoor transition area dynamic test, complex indoor dynamic test, and static test are shown in Figure 4. Accordingly, it can be seen that the quality of the UWB measurements is highly dependent on the user environments. For example, visible poor-quality measurements exist in indoor environments, and the quality of UWB ranges in other environments is much higher. As is widely known, the quality of measurements is the major factor that determines the final UWB positioning accuracy. Meanwhile, the UWB ranging offsets of these four tests calculated based on Equation (9) are plotted in Figure 5 and the corresponding statistics are listed in Figure 6. Significantly, it can be found that the calculated UWB ranging errors do not satisfy the unbiasedness of Gaussian distribution with a mean of nonzero, which proves the existence of ranging offsets. What is more, it can be seen that such ranging offsets are different for different base–tag pairs. According to the calculated RMS values, the ranging offset could be centimeters to decimeters, and the values for the same base–tag pair could also be different in different tests. Such differences are visible in most of the base–tag pairs. Therefore, such ranging offsets should be calibrated before UWB ranges are used in positioning.
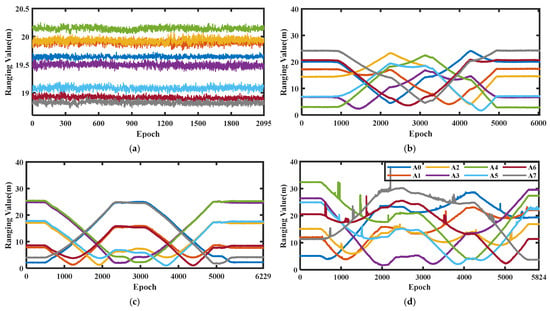
Figure 4.
UWB ranging values of each base–tag pair in different tests. (a) UWB ranges in the static test. (b) UWB ranges in the outdoor environments. (c) UWB ranges in the transition area. (d) UWB ranges in the indoor environments.
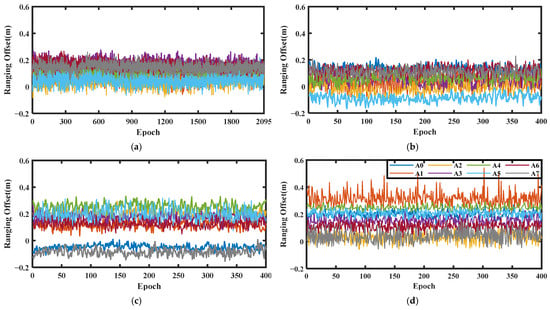
Figure 5.
Ranging offset time series in different conditions. (a) Ranging offsets in the static test. (b) Ranging offsets in the outdoor environments. (c) Ranging offsets in the transition area. (d) Ranging offsets in the indoor environments.
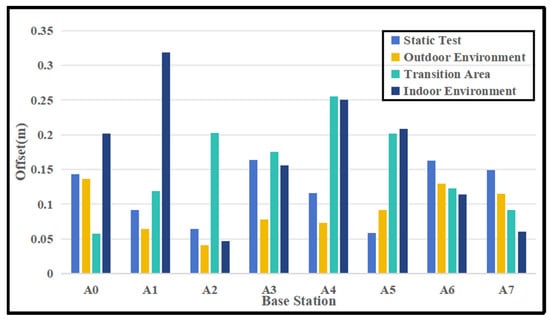
Figure 6.
Statistical results of ranging offsets in the four experiments.
3.3. UWB Positioning Accuracy Analysis
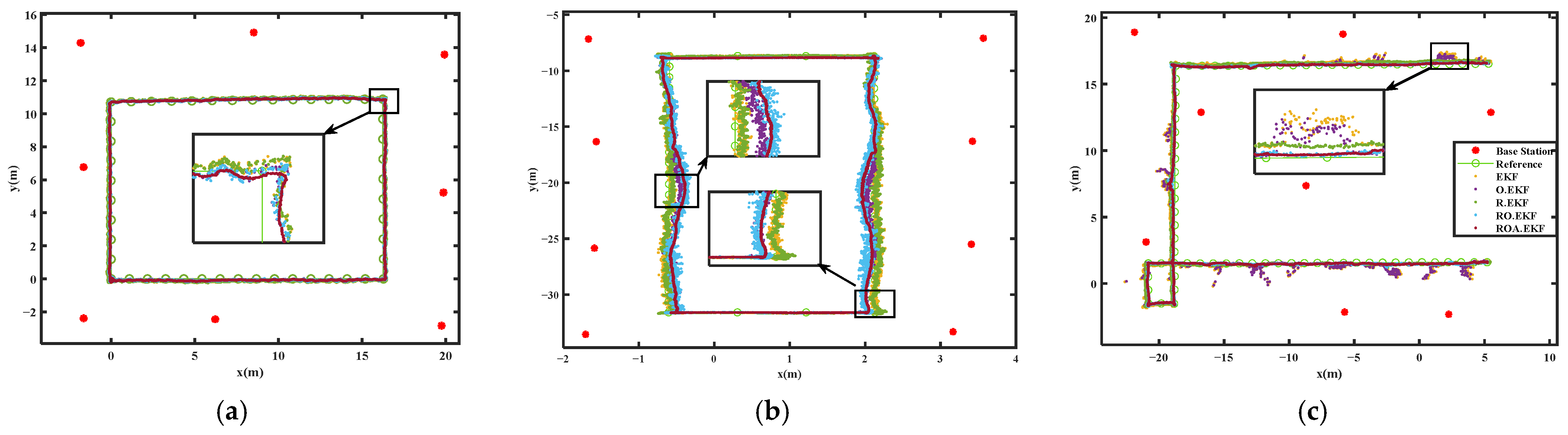
To further evaluate the impacts of each presented algorithm on UWB positioning accuracy, these collected UWB dynamic data are processed by conventional EKF, prior residual-based robust theory-augmented EKF (R.EKF), ranging offset calibrated-enhanced EKF (O.EKF), prior residual-based robust theory and ranging offset calibration-enhanced (RO.EKF), and moving average filter-enhanced RS.EKF (ROA.EKF), respectively. The corresponding results are displayed in Figure 7.
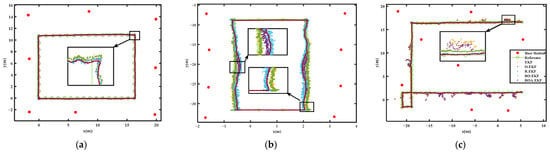
Figure 7.
Trajectories calculated by different schemes in the three different tests. (a) Outdoor test. (b) Transition area test. (c) Indoor test.
3.3.1. UWB Ranging Offset Calibration Algorithm Enhanced UWB Positioning
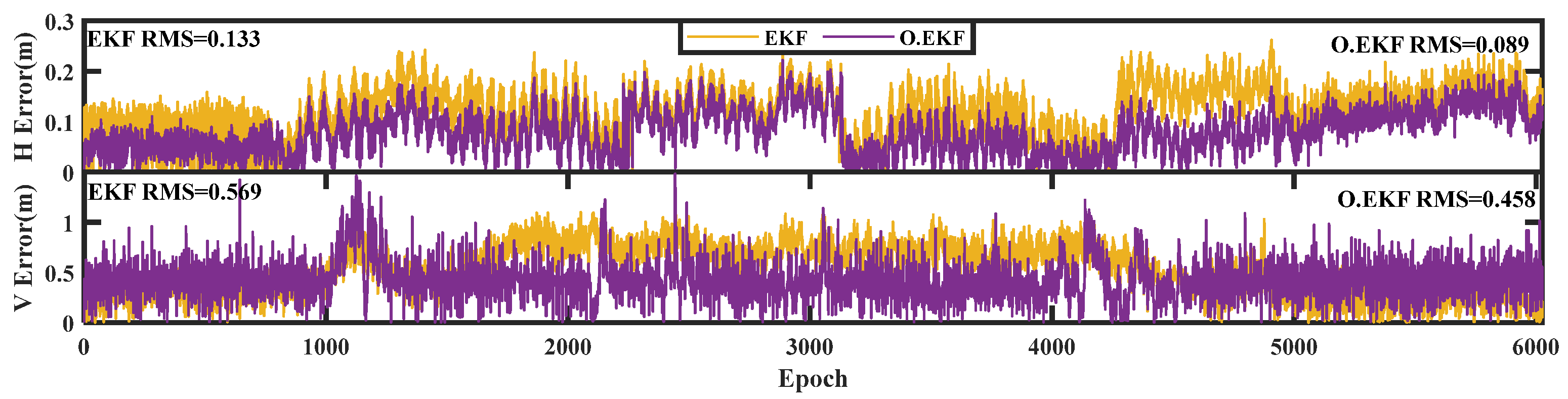
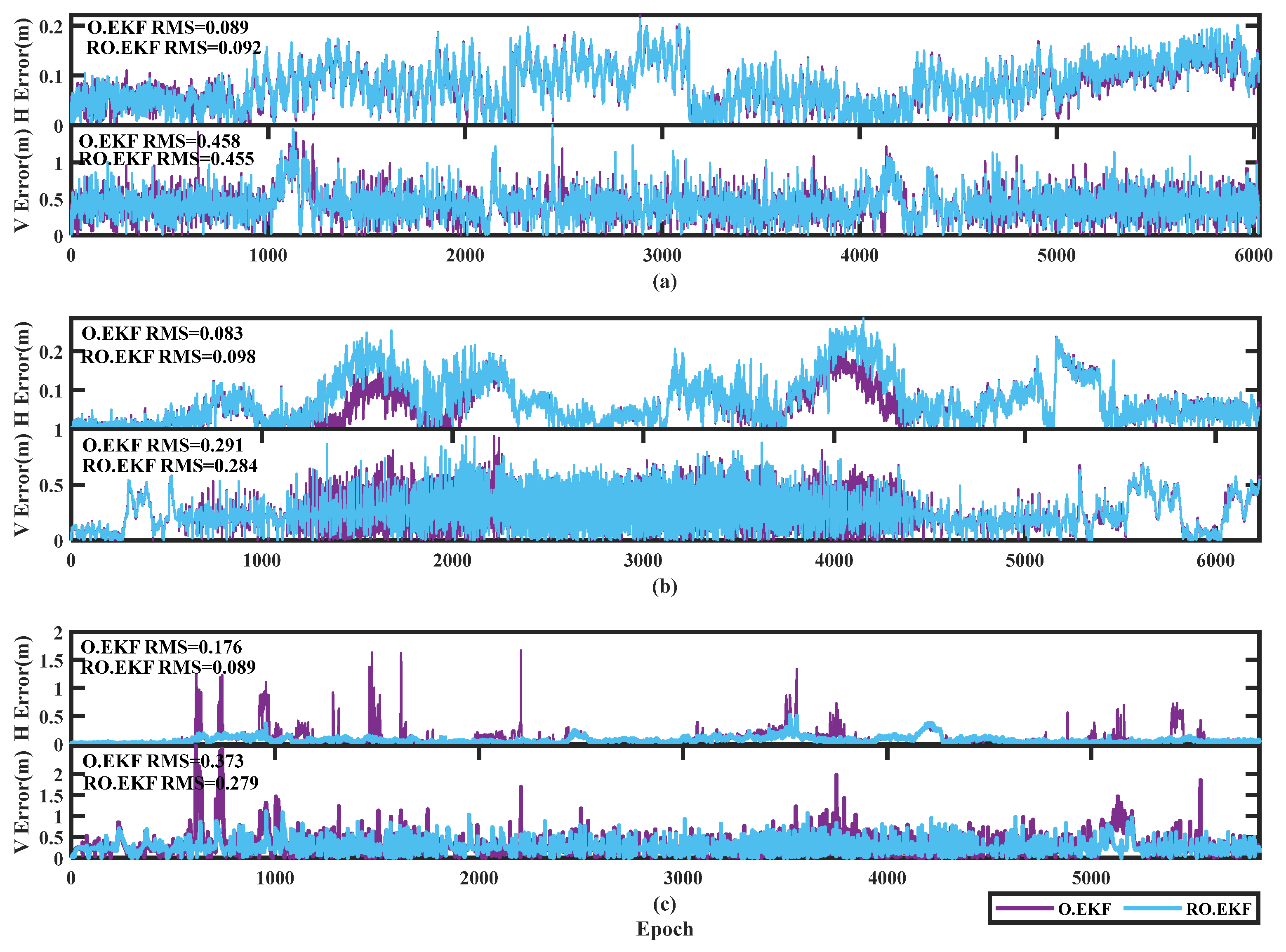
Firstly, the impact of the UWB ranging offset on the UWB positioning accuracy is analyzed. Figure 8, Figure 9 and Figure 10 show the time series of the position errors in the horizontal and vertical directions of the three dynamic tests, which are calculated by the EKF with and without the ranging offset calibration. As mentioned above, the UWB ranging offsets in each test are calculated by using the static data that are collected at the beginning or the end of each test. Significantly, after the compensation of ranging offsets, the position accuracy in different environments in both the horizontal and vertical components is improved.
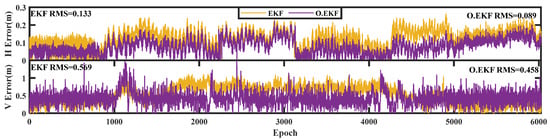
Figure 8.
Time series of position errors using EKF with and without ranging offset calibration in the outdoor environment.
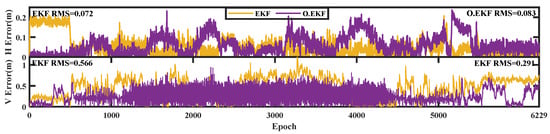
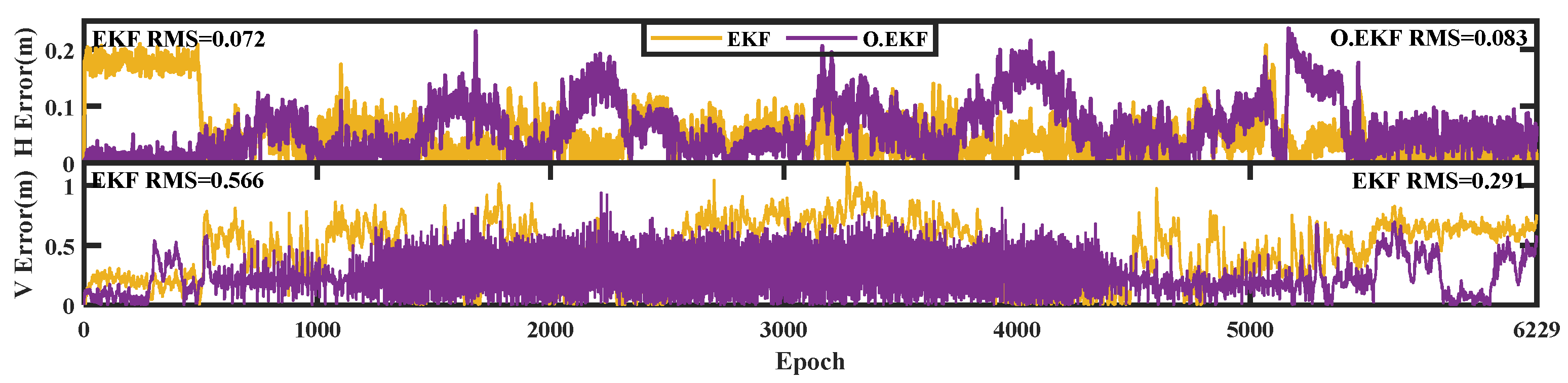
Figure 9.
Time series of position errors using EKF with and without ranging offset calibration in the transition area.
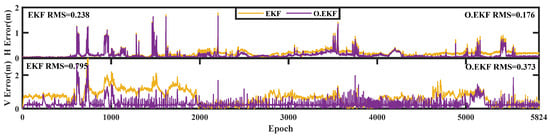
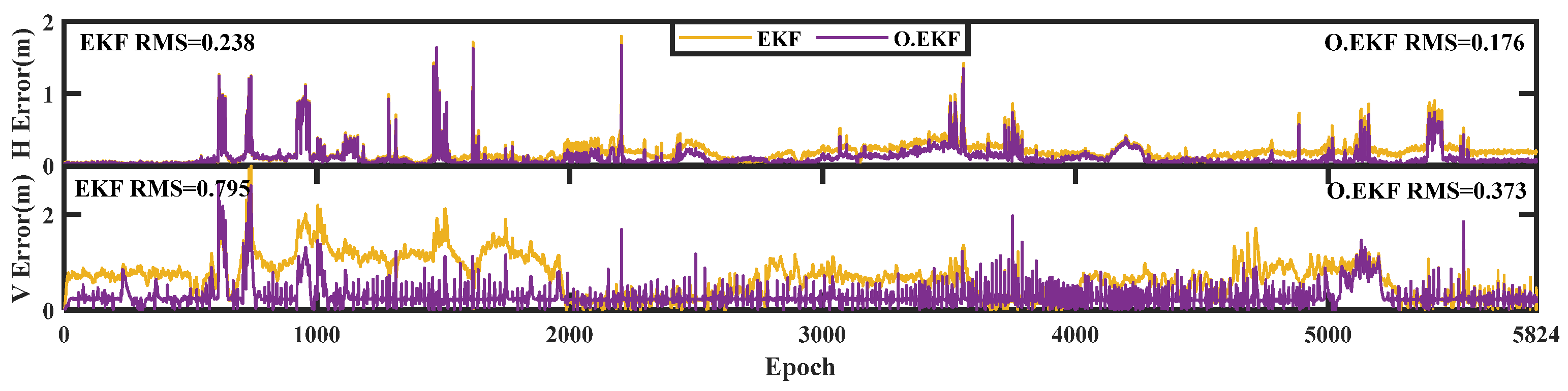
Figure 10.
Time series of position errors using EKF with and without ranging offset calibration in the indoor environment.
According to the statistical results, the position error in terms of the RMS in the horizontal and vertical components for the indoor environment experiment is improved from 0.238 m and 0.795 m to 0.176 m and 0.373 m, respectively, with the corresponding improvement percentages of 26.1% and 53.1%. For the outdoor environment experiment, such position RMSs in the two directions are 0.089 m and 0.458 m, which brings 33.1% and 19.5% enhancements compared to the solutions (0.133 m and 0.569 m) of the EKF without ranging offset calibration. For the transitional area experiment, there are visible position improvements in the vertical direction (vertical RMS is improved from 0.566 m to 0.291 m), which results in about a 48.6% position accuracy upgradation in the vertical direction. However, there is no accuracy enhancement in the horizontal component. The main reason for such an appearance is that there are NLOS errors in the transitional area. In general, according to these results based on the three tests arranged in different environments, we can know that the existence of the UWB ranging offset will actually limit the UWB positioning accuracy, and such an accuracy limitation is much more visible in the vertical direction rather than in the horizontal components. After calibrating such a range offset, the corrected range can lead to a higher accuracy parameter estimation.
3.3.2. Prior Residual-Based Robust Theory Enhanced UWB Positioning
According to the data quality analysis results, we know that there are poor-quality measurements. This means that the UWB positioning accuracy is still polluted even when applying the ranging offset calibration. Therefore, we further presented the impacts of a robust algorithm on the UWB positioning accuracy. As mentioned above, the conventional robust theory based on posterior UWB ranging residuals would be polluted by a bad UWB measurement at the previous epoch. Therefore, the prior residual-based robust algorithm is adopted here. In contrast, the prior residual-based robust theory-augmented EKF (R.EKF) as well as the prior residual-based robust theory and ranging offset calibration algorithm-enhanced EKF (RO.EKF) schemes are used. However, it should be noted that the performance of a robust model could be ineffective even with a slight accuracy degradation while the observation quality is high. In this study, the observation quality for the indoor test was poor, while the observation qualities for the transition and outdoor routes were higher. The time series of the position errors and the corresponding statistics are shown in Figure 11.
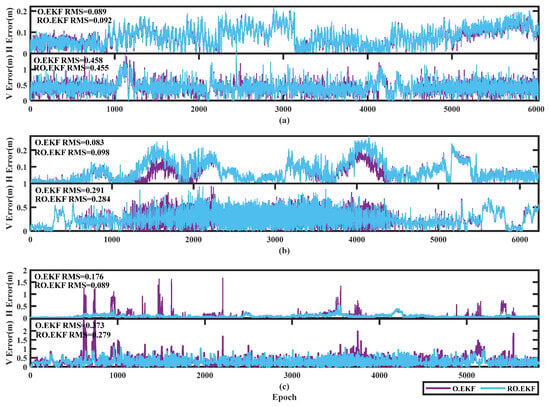
Figure 11.
Time series of position errors using EKF with and without ranging offset calibration in outdoor (a), transition area (b), and indoor (c) environments.
Obviously, it can be seen that the prior residual-based robust theory performs more visibly with existing poor-quality observations like in indoor environments. According to the statistical RMS values in Table 2, the position accuracy improvement percentages in the horizontal and vertical directions are 49.4% and 25.2% compared to the position errors with the ranging offset calibration-enhanced UWB (0.176 m and 0.373 m in horizontal and vertical directions) and with those of RO.EKF (0.089 m and 0.279 m in horizontal and vertical directions). The effect is rather clear in Figure 11c. However, in the transition area and outdoor conditions where there are high-quality observations, there are no significant improvements even in accuracy degradation. In fact, besides 2.4% position accuracy improvements in the vertical direction in the transition area, there are no more position accuracy improvements in such two environments.
Table 2.
RMS values of different positioning methods in the three different environments.
3.3.3. Moving Average Filter Enhanced UWB Positioning
After applying the ranging offset calibration and the prior residual-based robust algorithm, UWB can theoretically provide high-precision indoor positioning solutions. However, due to the influence of observation noise, the positioning results would be noised. To make the solutions smoother, a moving average filter is introduced to denoise the positioning results obtained from the above sections.
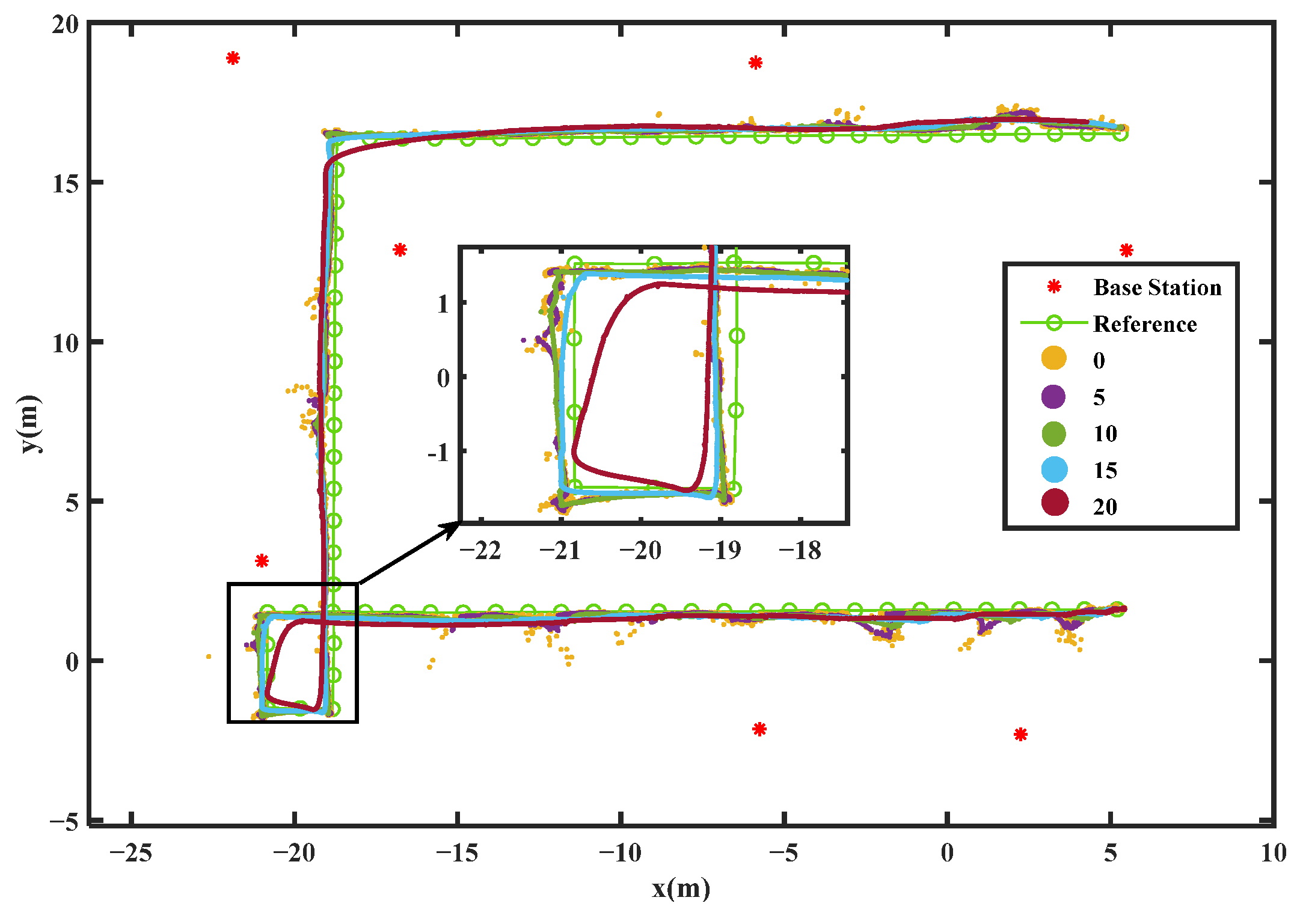
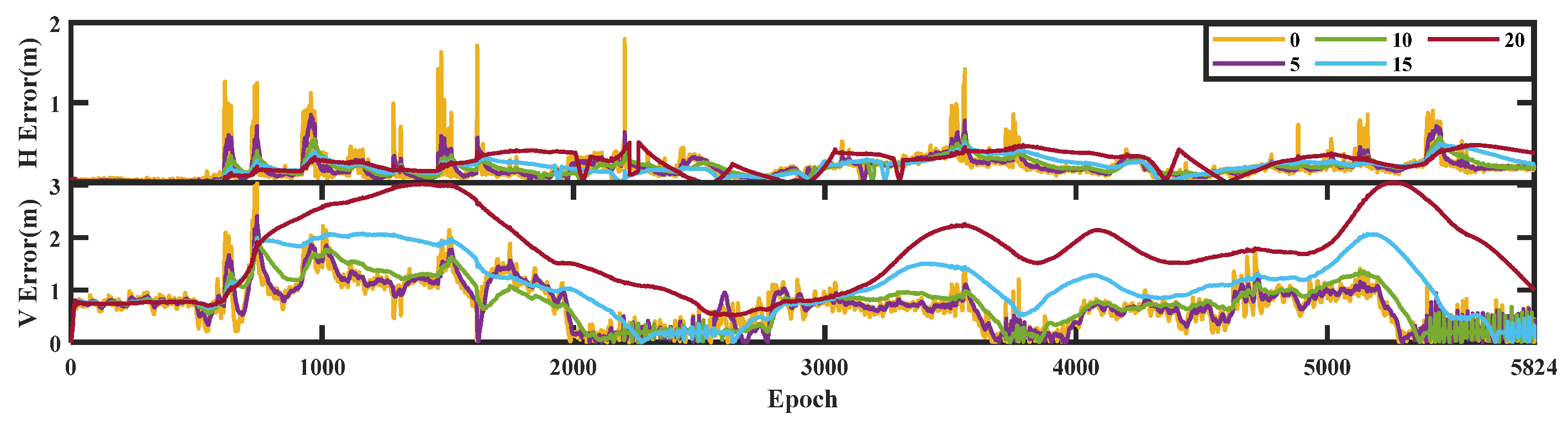
Before applying the moving average filter for denoising, it is necessary to set the window size. Shown in Figure 12 are the trajectories calculated by setting the window sizes to 5, 10, 15, and 20 epochs based on the data from the indoor test, and the corresponding positioning errors are plotted in Figure 13. According to the results based on different window sizes, it can be known that the smoothness is highly dependent on the window size. It demonstrates that a small window size would not take effect on denoising, and a large window size would make the observations at the current epoch heavily influenced by observations at previous epochs. Based on these results, this study ultimately selects a window size of 5 epochs for the moving average filter to denoise the UWB data.
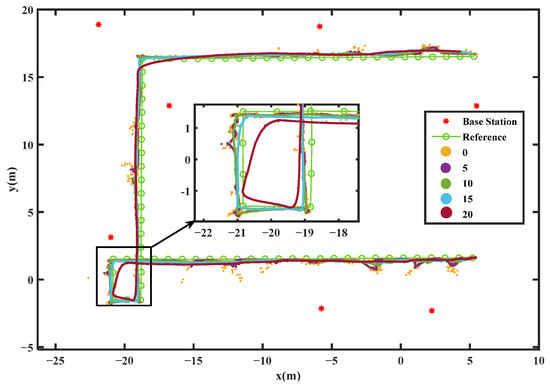
Figure 12.
Trajectories calculated by setting different window sizes.
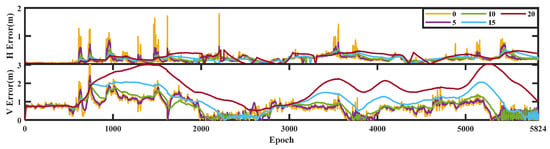
Figure 13.
Time series of position errors with setting different window sizes.
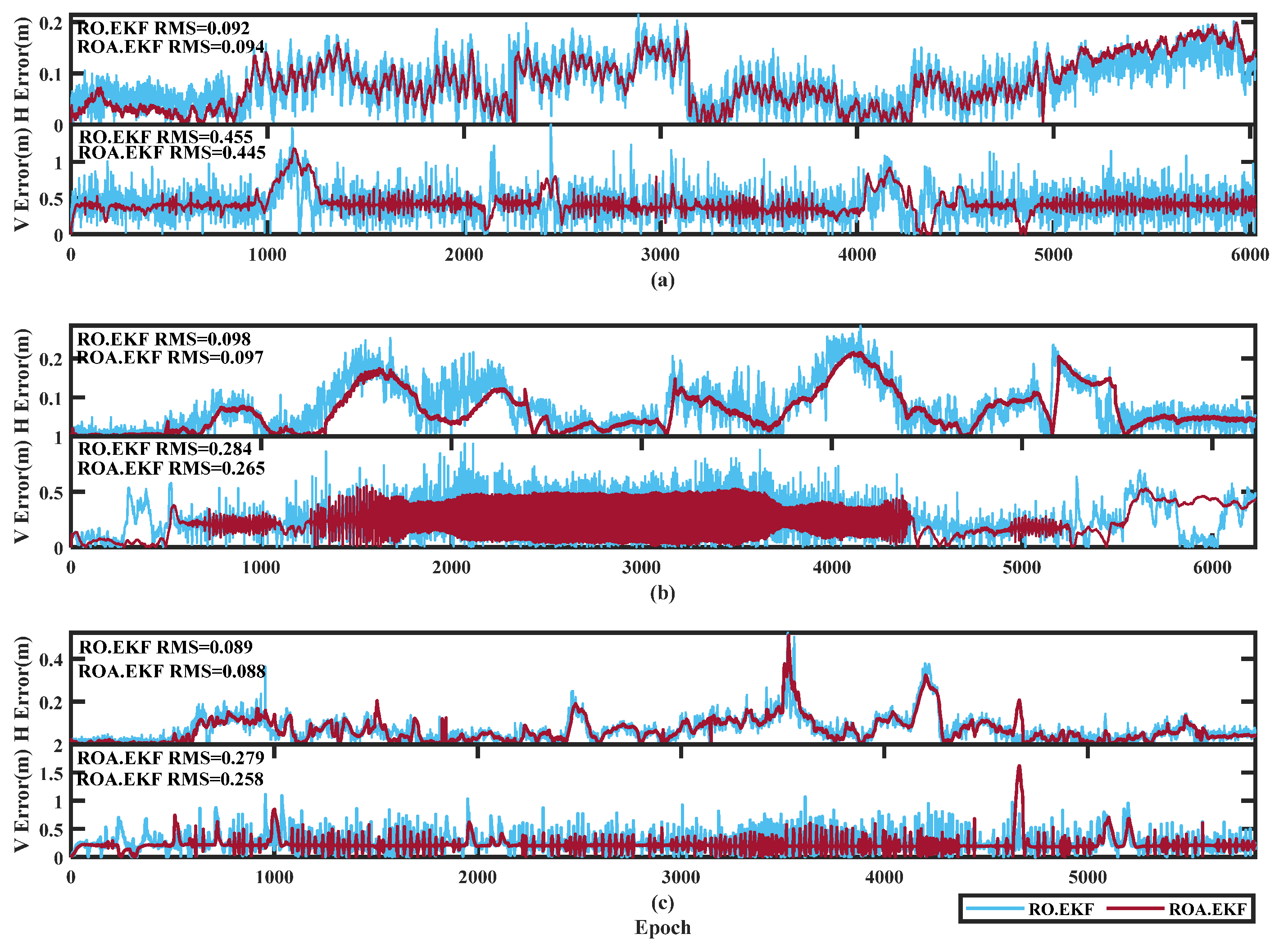
From the results shown in Figure 14, it can be known that there were almost no improvements in the positioning RMS values, with even a slight accuracy loss. Specifically, when the observations are without visible influences by NLOS or multipath errors (i.e., the data from the outdoor test), the positioning RMS value is slightly improved because of the denoising operation in Equation (14) to the UWB range’s random noise. However, the positioning accuracy could be lost while the observations are polluted such as in the indoor and transition areas, which can be identified by making a comparison with the results in Figure 14 and the data qualities in Figure 4. In general, such a moving average filter can theoretically make the positioning solutions smoother, but such an effect could be limited while the measurements suffer NLOS and/or multipath errors.
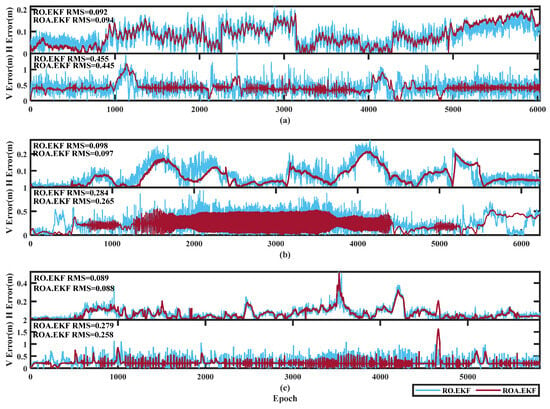
Figure 14.
Time series of position errors of the three dynamic tests after applying moving average filter: (a) outdoor environment, (b) transition area, and (c) indoor environment.
4. Discussion
The results presented above show that the proposed UWB positioning method to improve the positioning accuracy of UWB is feasible and effective. Our purpose is to improve the accuracy, robustness, and smoothness of UWB positioning results gradually by introducing UWB ranging offset calibration, the prior residual-based robust theory, and moving average filter, respectively, step by step.
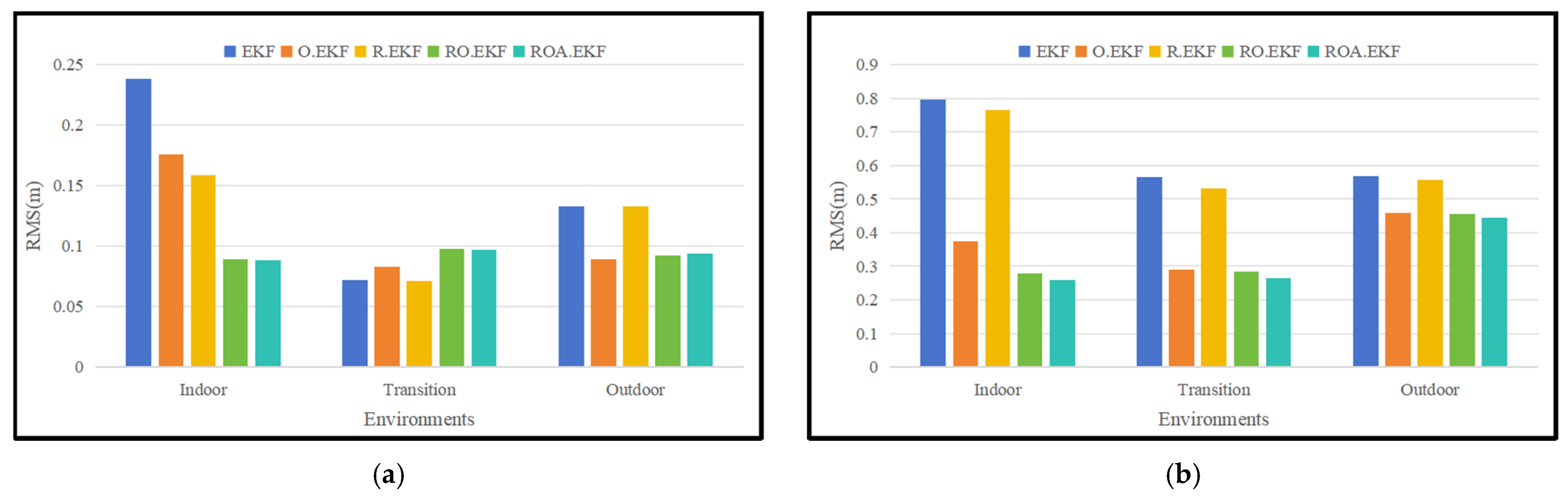
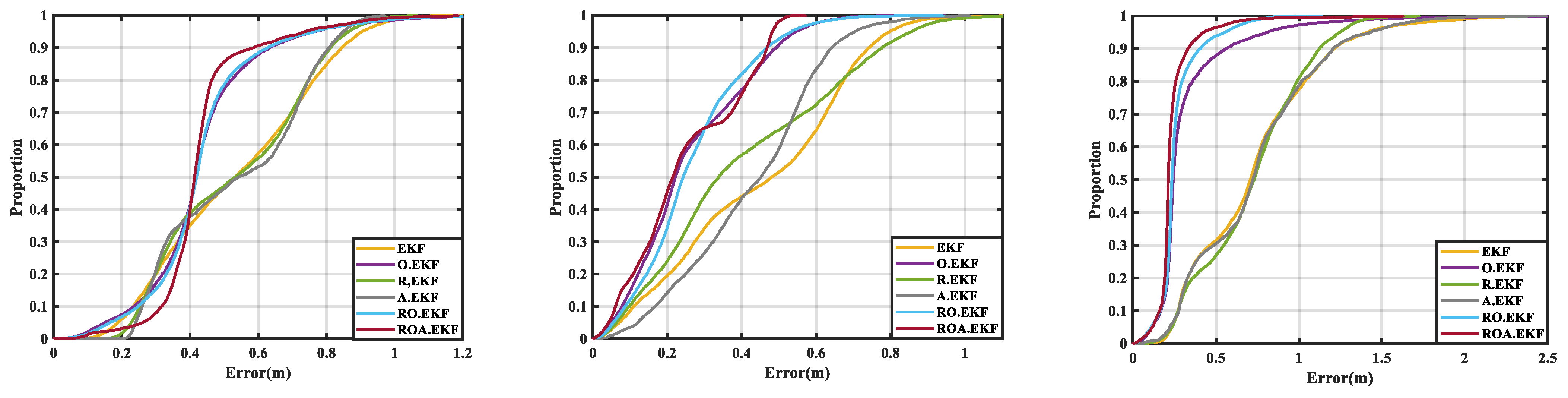
According to the statistical results shown in Figure 15, the positioning accuracy upgradation amplitudes brought by applying ranging offset calibration in the three classic user environments are clearly distinguishable. Meanwhile, the impact of the ranging offset calibration on the horizontal position and the vertical position are also different. In general, the position enhancements in the vertical direction are much more visible than those in the horizontal components, with about 19.5% to 53.1% in the vertical direction and about 33.1% in the horizontal directions, respectively. Wherein, such an improvement is more visible when using high-quality observations (i.e., in the outdoor environment) and the improvement will be limited while observations suffer multipath and/or NLOS errors (i.e., indoor environment). While further introducing the prior residual-based robust theory to the ranging offset-calibrated UWB positioning model, the UWB position accuracy is also further improved especially for the epochs with visible gross observation (i.e., indoor environment) or without gross observation but with some low-accuracy observations (i.e., outdoor environment). When there are too many low-accuracy observations (i.e., transition area), the impact of the adopted robust method would be limited. Generally, such an appearance owes to the basic assumption in Equation (13). As is well known, the robust method, no matter whether it is based on posterior residuals or prior residuals, assumes the percentage of low-accuracy and gross observations is no more than 50%. Therefore, when the assumption is satisfied, the robustness would appear; otherwise, the robustness may be limited. The moving average filter only takes effect on observation denoising, which is to improve the smoothness of the positioning results but not the accuracy improvements. As the statistics show, the impact of the moving average filter on the UWB positioning accuracy is only millimeter level to centimeter level in the three different experiments. To make the conclusions clearer, we provided the cumulative distribution function (CDF) of the UWB 3D position errors in different environments in Figure 16. The CDF demonstrates clearly that (1) the UWB positioning accuracy is effectively improved after applying ranging offset calibration, which proves the ranging offset plays a main determination in the UWB positioning accuracy; (2) the prior residual-based robust theory mainly contributes to positioning accuracy improvements, especially in challenging environments; and (3) the impact of the moving average filter on accuracy improvement is relatively slight but significant in improving the smoothness of the positioning results.
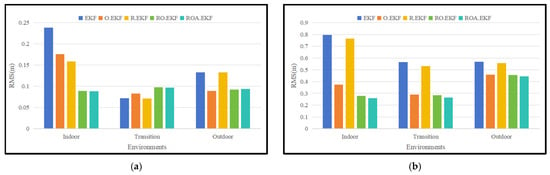
Figure 15.
Statistical results of position error of the three dynamic tests. (a) RMSE in the horizontal component. (b) RMSE in the vertical direction.
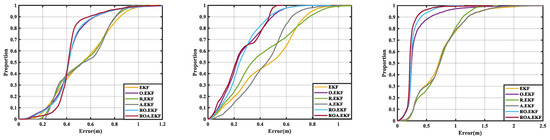
Figure 16.
Cumulative distribution function of 3D positioning errors for the outdoor test (left), transition test (middle), and indoor test (right).
5. Conclusions
This contribution proposed a novel UWB positioning model by introducing a UWB ranging offset calibration algorithm, a prior residual-based robust algorithm, and a moving average filter into the extended Kalman filter, which is proven to be helpful in upgrading UWB positioning accuracy and reliability. The experimental results collected under three classic user scenes (indoor, outdoor, and their transition area) demonstrated the validity of the proposed method.
In general, after applying our method, the UWB positioning accuracy in terms of the root mean square error values can be improved with position improvement percentages of 67.1%, 22.2%, and 50.5% in the environments of indoor, outdoor, and transition areas, respectively. Specifically, (1) after applying the ranging offset compensation, the positioning accuracy can be improved by 20% to 50%. Wherein, the vertical accuracy was increased by 53.1%, 19.5%, and 48.6%, respectively, in indoor, outdoor, and transition areas, while the horizontal accuracy was increased by 26.1% and 33.1%, respectively, in indoor and outdoor environments. In the transition area, the horizontal accuracy decreased slightly, but only produced centimeter-level or even millimeter-level changes. (2) The prior residual-based robust algorithm brings about 5.9%, 1.8%, and 5.9% position improvements in indoor, outdoor, and transition areas, respectively. (3) The moving average filter can effectively optimize the positioning results only in terms of smoothness but without significantly impacting the positioning accuracy.
In general, the proposed UWB positioning method is proven to be effective in upgrading the UWB positioning accuracy in classic user environments (indoor, outdoor, and transition areas). Even so, UWB will fail to provide position service while suffering serious signal blocking. Moreover, UWB positioning accuracy evaluations are based on the Euclidean distance and three classic environments, which cannot comprehensively show the positioning accuracy. Therefore, our works in the future are (1) to introduce multi-sensors such as inertial sensors, camera, and LiDAR into our UWB positioning system, by which the continuity, reliability, and accuracy can be further upgraded in more complex user environments by introducing external heterogeneous measurements and (2) finding a more credible accuracy evaluation method under situations with more persons and more obstacles.
Author Contributions
Conceptualization, J.L. (Junhao Liu) and Z.G.; data curation, J.L. (Junhao Liu), S.L. and J.L. (Jia Liu); funding acquisition, Z.G.; investigation, Z.G. and Y.L.; methodology, J.L. (Junhao Liu), Z.G. and Y.L.; software, J.L. (Junhao Liu) and Y.L.; validation, J.L. (Junhao Liu); visualization, Z.G. and C.Y.; writing—original draft, J.L. (Junhao Liu); writing—review and editing, J.L. (Junhao Liu), Z.G. and C.Y. All authors have read and agreed to the published version of the manuscript.
Funding
This work was partially funded by the National Natural Science Foundation of China (NSFC) (Grants No. 42274022 and 42274024).
Data Availability Statement
The datasets adopted in this paper can be available on request from the corresponding author.
Acknowledgments
The authors would like to thank anonymous reviewers who gave valuable suggestions that helped to improve the quality of the manuscript.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Teunissen, P.J.G. Integer least-squares theory for the GNSS compass. J. Geod. 2010, 84, 433–447. [Google Scholar] [CrossRef]
- Lachapelle, G. GNSS indoor location technologies. J. Glob. Position. Syst. 2004, 3, 2–11. [Google Scholar] [CrossRef]
- Ghinamo, G.; Detoma, E.; Cavallo, D.; Boiero, G.; Lovisolo, P.; Torre, A.D. Analysis of the Accuracy of Indoor GNSS Measurements and Positioning Solution. In Proceedings of the European Navigation Conference 2008, Toulouse, France, 22–25 April 2008. [Google Scholar]
- Zhe, H.; Petovello, M.; Ling, P.; Olesen, D.M. Evaluation of GPS/BDS indoor positioning performance and enhancement. Adv. Space Res. 2017, 59, 870–876. [Google Scholar]
- Mautz, R. Indoor Positioning Technologies. Ph.D. Thesis, ETH Zürich, Zürich, Switzerland, 2012. [Google Scholar]
- Dabove, P.; Pietra, V.D.; Piras, M.; Jabbar, A.A.; Kazim, S.A. Indoor positioning using Ultra-wide band (UWB) technologies: Positioning accuracies and sensors’ performances. In Proceedings of the 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 26 April 2018; pp. 175–184. [Google Scholar]
- Ledergerber, A.; D’Andrea, R. Ultra-wideband range measurement model with Gaussian processes. In Proceedings of the 2017 IEEE Conference on Control Technology and Applications (CCTA), Kohala Coast, HI, USA, 27–30 August 2017; pp. 1929–1934. [Google Scholar]
- Wang, Y.; Yang, X.; Zhao, Y.; Liu, Y.; Cuthbert, L. Bluetooth positioning using RSSI and triangulation methods. In Proceedings of the 2013 IEEE 10th Consumer Communications and Networking Conference (CCNC), Las Vegas, NV, USA, 11–14 January 2013; pp. 837–842. [Google Scholar]
- Cheng, Y.; Zhou, T. UWB Indoor Positioning Algorithm Based on TDOA Technology. In Proceedings of the 2019 10th International Conference on Information Technology in Medicine and Education (ITME), Qingdao, China, 23–25 August 2019; pp. 777–782. [Google Scholar]
- Tian, Z.; Wang, Z.; Li, Z.; Zhou, M. RTIL: A Real-Time Indoor Localization System by Using Angle of Arrival of Commodity WiFi Signal. In Proceedings of the 2019 11th International Conference on Wireless Communications and Signal Processing (WCSP), Xi’an, China, 23–25 October 2019; pp. 1–6. [Google Scholar]
- Schmid, L.; Salido-Monzú, D.; Wieser, A. Accuracy Assessment and Learned Error Mitigation of UWB ToF Ranging. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 September–3 October 2019; pp. 1–8. [Google Scholar]
- Mahfouz, M.R.; Fathy, A.E.; Kuhn, M.J.; Wang, Y. Recent trends and advances in UWB positioning. In Proceedings of the 2009 IEEE MTT-S International Microwave Workshop on Wireless Sensing, Local Positioning, and RFID, Cavtat, Croatia, 24–25 September 2009; pp. 1–4. [Google Scholar]
- Poulose, A.; Eyobu, O.S.; Kim, M.; Han, D.S. Localization Error Analysis of Indoor Positioning System Based on UWB Measurements. In Proceedings of the 2019 Eleventh International Conference on Ubiquitous and Future Networks (ICUFN), Zagreb, Croatia, 2–5 July 2019; pp. 84–88. [Google Scholar]
- Dierenbach, K.; Ostrowski, S.; Jozkow, G.; Toth, C.K.; Grejner-Brzezinska, D.A.; Koppanyi, Z. UWB for navigation in GNSS compromised environments. In Proceedings of the 28th international technical meeting of the satellite division of the institute of navigation (ION GNSS+ 2015), Tampa, FL, USA, 14–18 September 2015; pp. 2380–2389. [Google Scholar]
- Yang, G.; Zhao, L.; Dai, Y.; Xu, Y. A KFL-TOA UWB indoor positioning method for complex environment. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; pp. 3010–3014. [Google Scholar]
- Park, J.W.; Nam, S.C.; Choi, H.B.; Ko, Y.E.; Ko, Y.B. Improving deep learning-based UWB LOS/NLOS identification with transfer learning: An empirical approach. Electronics 2020, 9, 1714. [Google Scholar] [CrossRef]
- Barral, V.; Escudero, C.J.; García-Naya, J.A.; Suárez-Casal, P. Environmental cross-validation of NLOS machine learning classification/mitigation with low-cost UWB positioning systems. Sensors 2019, 19, 5438. [Google Scholar] [CrossRef] [PubMed]
- Chen, L.; Gao, Z.; Xu, Q.; Yang, C.; Li, Y. Comprehensive Evaluation of Robust and Tight Integration of UWB and Low-cost IMU. IEEE Sens. J. 2023, 23, 26411–26422. [Google Scholar] [CrossRef]
- Denis, B.; Keignart, J.; Daniele, N. Impact of NLOS propagation upon ranging precision in UWB systems. In Proceedings of the IEEE Conference on Ultra Wideband Systems and Technologies, Reston, VA, USA, 16–19 November 2003; pp. 379–383. [Google Scholar]
- Dong, M. A low-cost NLOS identification and mitigation method for UWB ranging in static and dynamic environments. IEEE Commun. Lett. 2021, 25, 2420–2424. [Google Scholar] [CrossRef]
- Nguyen, D.T.A.; Lee, H.G.; Jeong, E.R.; Lee, H.L.; Joung, J. Deep learning-based localization for UWB systems. Electronics 2020, 9, 1712. [Google Scholar] [CrossRef]
- Tian, Q.; Kevin, I.; Wang, K.; Salcic, Z. An INS and UWB fusion approach with adaptive ranging error mitigation for pedestrian tracking. IEEE Sens. J. 2020, 20, 4372–4381. [Google Scholar] [CrossRef]
- Smaoui, N.; Gnawali, O.; Kim, K. Study and mitigation of platform related uwb ranging errors. In Proceedings of the 2020 International Conference on COMmunication Systems & NETworkS (COMSNETS), Bengaluru, India, 7–11 January 2020; pp. 346–353. [Google Scholar]
- Borhan, N.; Saleh, I.; Yunus, A.; Rahiman, W.; Novaliendry, D. Reducing UWB Indoor Localization Error Using the Fusion of Kalman Filter with Moving Average Filter. In Proceedings of the 2023 IEEE International Conference on Automatic Control and Intelligent Systems (I2CACIS), Shah Alam, Malaysia, 17 June 2023; pp. 55–59. [Google Scholar]
- Guo, S.; Zhang, Y.; Gui, X.; Han, L. An Improved PDR/UWB Integrated System for Indoor Navigation Applications. IEEE Sens. J. 2020, 20, 8046–8061. [Google Scholar] [CrossRef]
- Liu, T.; Li, B.; Chen, G.; Yang, L.; Qiao, J.; Chen, W. Tightly Coupled Integration of GNSS/UWB/VIO for Reliable and Seamless Positioning. IEEE Trans. Intell. Transp. Syst. 2024, 25, 2116–2128. [Google Scholar] [CrossRef]
- Han, H.; Wang, J.; Liu, F.; Zhang, J.; Yang, D.; Li, B. An Emergency Seamless Positioning Technique Based on ad hoc UWB Networking Using Robust EKF. Sensors 2019, 19, 3135. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Han, H.; Wang, J.; Yu, H.; Yang, D. A Robust Extended Kalman Filter Applied to Ultrawideband Positioning. Math. Probl. Eng. 2020, 2020, 1809262. [Google Scholar] [CrossRef]
- Ghanem, E.; O’Keefe, K.; Klukas, R. Testing vehicle-to-vehicle relative position and attitude estimation using multiple UWB ranging. In Proceedings of the 2020 IEEE 92nd Vehicular Technology Conference (VTC2020-Fall), Victoria, BC, Canada, 18 November–16 December 2020; pp. 1–5. [Google Scholar]
- Jiang, Y.; Pan, S.; Meng, Q.; Zhang, M.; Gao, W.; Ma, C. Performance Analysis of Robust Tightly Coupled GNSS/INS Integration Positioning Based on M Estimation in Challenging Environments. In Proceedings of the China Satellite Navigation Conference (CSNC 2022) Proceedings, Singapore, 25 May 2022; pp. 400–414. [Google Scholar]
- Li, Y.; Gao, Z.; Xu, Q.; Yang, C. Comprehensive Evaluations of NLOS and Linearization Errors on UWB Positioning. Appl. Sci. 2023, 13, 6187. [Google Scholar] [CrossRef]
- Koswatta, R.; Karmakar, N.C. Moving average filtering technique for signal processing in digital section of UWB chipless RFID reader. In Proceedings of the 2010 Asia-Pacific Microwave Conference, Yokohama, Japan, 7–10 December 2010; pp. 1304–1307. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).