
An Efficient Sparse Recovery STAP Algorithm for Airborne Bistatic Radars Based on Atomic Selection under the Bayesian Framework

Abstract

1. Introduction
- (a)
- An efficient SR STAP algorithm for airborne bistatic radars based on atomic selection under the Bayesian framework is proposed; it has low computational complexity and addresses the issue of grid mismatch when applying the MSBL-STAP algorithm to an airborne bistatic radar.
- (b)
- Under the new hierarchical Bayesian model, the noise term is integrated out to avoid the adverse effects caused by inaccurate noise power estimations in the iterative process of the traditional MSBL-STAP algorithm when the number of atoms in the dictionary is much larger than the system’s degrees of freedom under encrypted grid conditions, further improving the algorithm’s performance.
- (c)
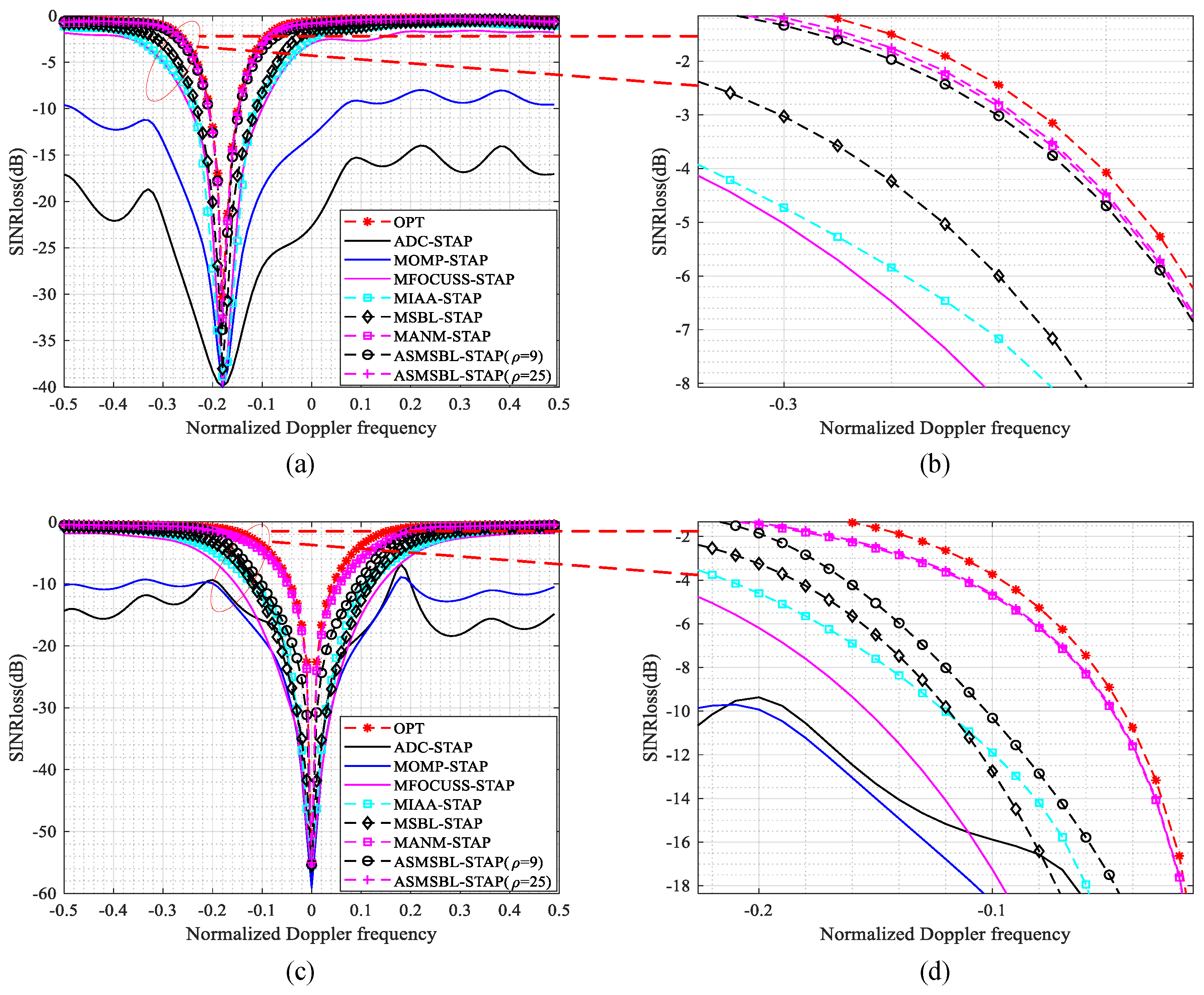
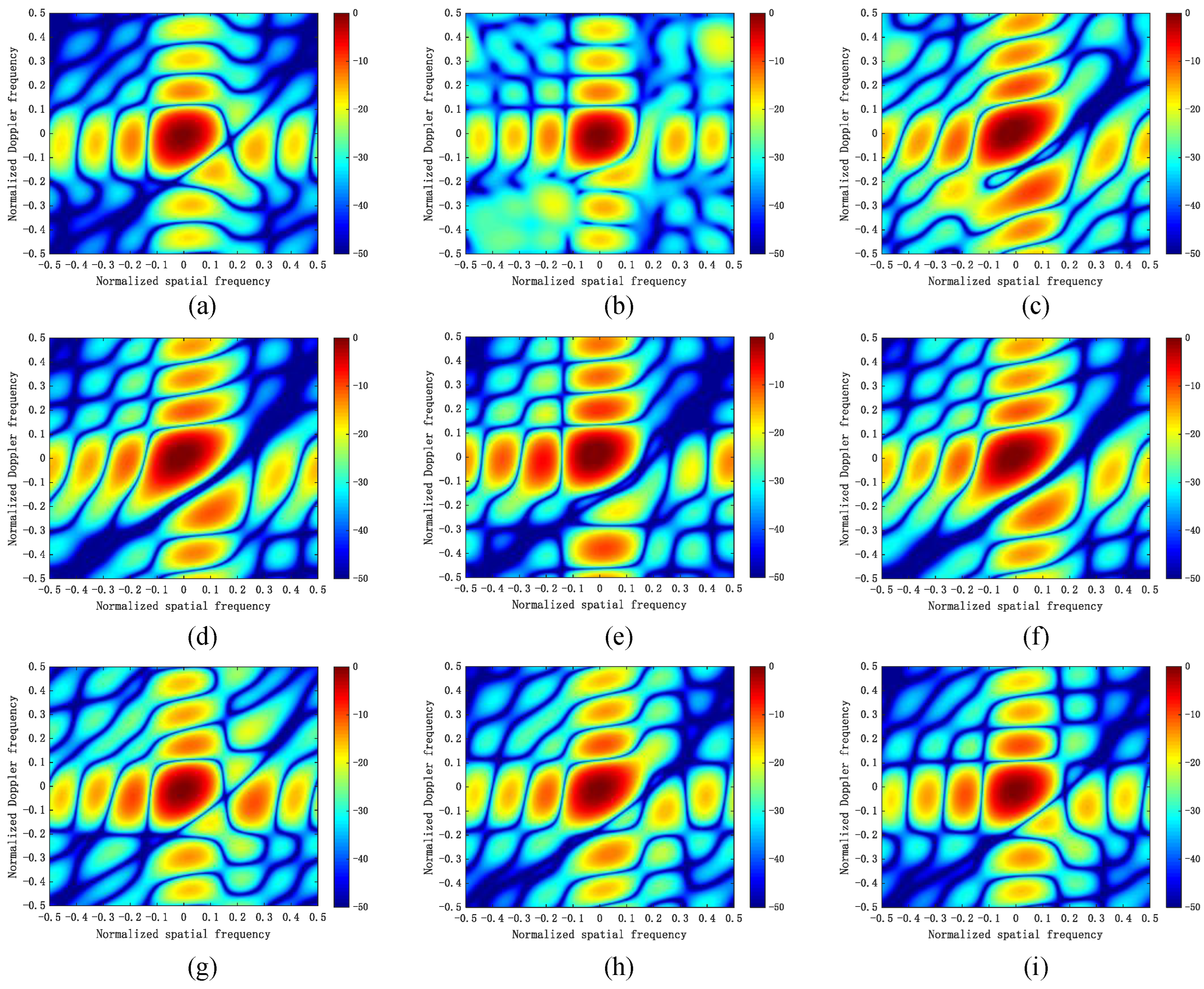
- We conducted a large number of simulation experiments to validate the efficiency, clutter suppression performance and target detection performance of our algorithm. The simulation results show that, compared to other traditional STAP and SR STAP algorithms, our algorithm demonstrates high efficiency and good clutter suppression performance and target detection performance.
2. Signal Model
2.1. Signal Model of SR STAP for Airborne Bistatic Radars
2.2. Grid Mismatch Analysis
3. Proposed Algorithm
3.1. Hierarchical Bayesian Framework
3.2. New Bayesian Inference
- (1)
- If and , add to and add to , i.e., , ;
- (2)
- If and , update in , ;
- (3)
- If and , remove in and remove in ;
- (4)
- If and , terminate the iteration as the algorithm has converged.
| Algorithm 1 Pseudocode of the proposed ASMSBL-STAP algorithm |
| Input: training data , space-time dictionary |
| Initialization:,, , setting , utilizing (30) and (32) to get and . |
| Repeat: |
| Step1: Using (58) to get the initial atom index , using (54) get . |
| Step2: If and , , . else if and , update in , . else if and , remove in and remove in . end |
| Step3: Update , , and using formulas in the Appendix A. Until the algorithm converged Using (33) to get reconstructed CNCM . Using (14) to get optimal STAP weight vector . |
4. Convergence and Computational Complexity Analysis
4.1. Convergence Analysis of the Proposed ASMSBL-STAP Algorithm
4.2. Computational Complexity Analysis of the Proposed ASMSBL-STAP Algorithm
5. Numerical Simulation
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Klemm, R. Comparison between monostatic and bistatic antenna configurations for STAP. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 596–608. [Google Scholar] [CrossRef]
- Himed, B.; James, H.M.; Zhang, Y.H. Bistatic STAP performance analysis in radar applications. In Proceedings of the 2001 IEEE Radar Conference, Atlanta, GA, USA, 3 May 2001; pp. 198–203. [Google Scholar]
- Gelli, S.; Bacci, A.; Martorella, M.; Berizzi, F. Clutter suppression and high-resolution imaging of noncooperative ground targets for bistatic airborne radar. IEEE Trans. Aerosp. Electron. Syst. 2017, 54, 932–949. [Google Scholar] [CrossRef]
- Klemm, R. Effect of bistatic radar configurations on STAP. In Proceedings of the European Synthetic Aperture Radar Conference, Munich, Germany, 23–25 May 2000; pp. 817–820. [Google Scholar]
- Duan, R.; Wang, X.; Chen, Z. Space-time clutter model for airborne bistatic radar with non-Gaussian statistics. In Proceedings of the 2008 IEEE Radar Conference, Adelaide, SA, Australia, 2–5 September 2008; pp. 1–6. [Google Scholar]
- Reed, I.S.; Mallett, J.D.; Brennan, L.E. Rapid convergence rate in adaptive arrays. IEEE Trans. Aerosp. Electron. Syst. 1974, 10, 853–863. [Google Scholar] [CrossRef]
- Klemm, R. Principles of Space-Time Adaptive Processing; The Institution of Electrical Engineers: London, UK, 2002. [Google Scholar]
- Brennan, L.E.; Mallett, J.D.; Reed, I.S. Theory of adaptive radar. IEEE Trans. Aerosp. Electron. Syst. 1973, 9, 237–251. [Google Scholar] [CrossRef]
- Melvin, W.L. Space-time adaptive radar performance in heterogeneous clutter. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 621–633. [Google Scholar] [CrossRef]
- DiPietro, R. Extended factored space–time processing for airborne radar systems. Signals Syst. Comput. 1992, 1, 425–430. [Google Scholar]
- Song, D.; Feng, Q.; Chen, S.; Xi, F.; Liu, Z. Space-time adaptive processing using deep neural network-based shrinkage algorithm under small training samples. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 9697–9703. [Google Scholar] [CrossRef]
- Klintberg, J.; McKelvey, T.; Dammert, P. A parametric approach to space-time adaptive processing in bistatic radar systems. IEEE Trans. Aerosp. Electron. Syst. 2021, 58, 1149–1160. [Google Scholar] [CrossRef]
- Song, D.; Feng, Q.; Chen, S.; Xi, F.; Liu, Z. Random matrix theory-based reduced-dimension space-time adaptive processing under finite training samples. Remote Sens. 2022, 14, 3959. [Google Scholar] [CrossRef]
- Liu, W.J.; Xie, W.C.; Liu, J.; Wang, Y. Adaptive double subspace signal detection in Gaussian background-Part I: Homogeneous environments. IEEE Trans. Signal Process. 2014, 62, 2345–2357. [Google Scholar] [CrossRef]
- Liu, W.J.; Liu, J.; Gao, Y.C.; Wang, G.; Wang, Y.-L. Multichannel signal detection in interference and noise when signal mismatch happens. Signal Process. 2020, 166, 107268. [Google Scholar] [CrossRef]
- Liu, W.J.; Liu, J.; Du, Q.L.; Wang, Y.-L. Distributed target detection in partially homogeneous environment when signal mismatch occurs. IEEE Trans. Signal Process. 2018, 66, 3918–3928. [Google Scholar] [CrossRef]
- Meng, Z.; Shen, F. Robust space-time adaptive processing method for GNSS receivers in coherent signal environments. Remote Sens. 2023, 15, 4212. [Google Scholar] [CrossRef]
- Huang, P.; Zou, Z.; Xia, X.G.; Liu, X.; Liao, G. A novel dimension-reduced space-time adaptive processing algorithm for spaceborne multichannel surveillance radar systems based on spatial–temporal 2-D sliding window. IEEE Geosci. Remote Sens. 2022, 60, 1–21. [Google Scholar] [CrossRef]
- Ward, J.; Steinhardt, A.O. Multiwindow post-Doppler space-time adaptive processing. In Proceedings of the IEEE Signal Processing Workshop Statistical Signal Array Processing, Quebec, QC, Canada, 26–29 June 1994. [Google Scholar]
- Ward, J. Space-Time Adaptive Processing for Airborne Radar; MIT Lincoln Laboratory: Lexington, KY, USA, 1994. [Google Scholar]
- Borsari, G.K. Mitigating effects on STAP processing caused by an inclined array. In Proceedings of the 1998 IEEE Radar Conference, Dallas, TX, USA, 14 May 1998; pp. 135–140. [Google Scholar]
- Zhao, H.; Shi, Y.; Zhang, B.; Shi, M. Analysis and simulation of interference suppression for space-time adaptive processing. In Proceedings of the IEEE International Conference on Signal Processing, Communications and Computing, Guilin, China, 5–8 August 2014; pp. 724–727. [Google Scholar]
- Himed, B.; Zhang, Y.; Hajjari, A. STAP with angle-Doppler compensation for bistatic airborne radars. In Proceedings of the 2002 IEEE Radar Conference, Long Beach, CA, USA, 25 April 2002; pp. 311–317. [Google Scholar]
- Melvin, W.L.; Davis, M.E. Adaptive cancellation method for geometry-induced nonstationary bistatic clutter environments. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 651–672. [Google Scholar] [CrossRef]
- Shen, M.; Yu, J.; Wu, D.; Zhu, D. An efficient adaptive angle-Doppler compensation approach for non-sidelooking airborne radar STAP. Sensors 2015, 15, 13121–13131. [Google Scholar] [CrossRef] [PubMed]
- Lapierre, F.D.; Verly, J.G.; Van Droogenbroeck, M. New solutions to the problem of range dependence in bistatic STAP radars. In Proceedings of the 2003 IEEE Radar Conference, Huntsville, AL, USA, 8 May 2003; pp. 452–459. [Google Scholar]
- Varadarajan, V.; Krolik, J.L. Space-time interpolation for adaptive arrays with limited training data. In Proceedings of the 2003 IEEE International Conference on Acoustics, Speech, and Signal Processing, Hong Kong, China, 6–10 April 2003; pp. V–353. [Google Scholar]
- Varadarajan, V.; Krolik, J.L. Joint space-time interpolation for bistatic STAP. In Proceedings of the Thrity-Seventh Asilomar Conference on Signals, Systems & Computers, Pacific Grove, CA, USA, 9–12 November 2003; pp. 60–65. [Google Scholar]
- Zatman, M. Performance analysis of the derivative based updating method. In Proceedings of the Adaptive Sensor Array Processing Workshop, MIT Lincoln Lab., Lexington, MA, USA, 13–14 March 2001. [Google Scholar]
- Baraniuk, R.G. Compressive sensing. IEEE Signal Proc. Mag. 2007, 24, 118–121. [Google Scholar] [CrossRef]
- Trzasko, J.; Manduca, A. Relaxed conditions for sparse signal recovery with general concave priors. IEEE Trans. Signal Process. 2009, 57, 4347–4354. [Google Scholar] [CrossRef]
- Mallat, S.G.; Zhang, Z. Matching pursuits with time-frequency dictionaries. IEEE Trans. Signal Process. 1993, 41, 3397–3415. [Google Scholar] [CrossRef]
- Tropp, J.A.; Gilbert, A.C. Signal recovery from random measurements via orthogonal matching pursuit. IEEE Trans. Inf. Theory 2007, 53, 4655–4666. [Google Scholar] [CrossRef]
- Koh, K.; Kim, S.J.; Boyd, S. An interior-point method for large-scale ℓ1-regularized logistic regression. J. Mach. Learn. Res. 2007, 1, 606–617. [Google Scholar]
- Gorodnitsky, I.F.; Rao, B.D. Sparse signal reconstruction from limited data using FOCUSS: A re-weighted minimum norm algorithm. IEEE Trans. Signal Process. 1997, 45, 600–616. [Google Scholar] [CrossRef]
- Yardibi, T.; Li, J.; Stoica, P.; Xue, M.; Baggeroer, A.B. Source localization and sensing: A nonparametric iterative adaptive approach based on weighted least squares. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 425–443. [Google Scholar] [CrossRef]
- Yang, Z.C.; Li, X.; Wang, H.Q.; Jiang, W.D. On clutter sparsity analysis in space-time adaptive processing airborne radar. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1214–1218. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, T.; Liu, C.; Ren, B. A fast IAA−based SR−STAP method for airborne radar. Remote Sens. 2024, 16, 1388. [Google Scholar] [CrossRef]
- Li, X.; Yang, X.; Wang, Y.; Duan, K. Gridless sparse clutter nulling STAP based on particle swarm optimization. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Ślesicka, A.; Kawalec, A. An application of the orthogonal matching pursuit algorithm in space-time adaptive processing. Sensors 2020, 20, 3468. [Google Scholar] [CrossRef]
- Yang, X.; Sun, Y.; Zeng, T.; Long, T. Iterative roubust sparse recoery method based on focuss for space-time adaptive processing. In Proceedings of the IET International Radar Conference, Hangzhou, China, 14–16 October 2015; pp. 1–6. [Google Scholar]
- Yang, Z.C.; Li, X.; Wang, H.; Jiang, W. Adaptive clutter suppression based on iterative adaptive approach for airborne radar. Signal Process. 2013, 93, 3567–3577. [Google Scholar] [CrossRef]
- Feng, W.; Guo, Y.; Zhang, Y.; Gong, J. Airborne radar space time adaptive processing based on atomic norm minimization. Signal Process. 2018, 148, 31–40. [Google Scholar] [CrossRef]
- Grant, M.; Boyd, S. CVX: Matlab Software for Disciplined Convex Programing, Version 2.0 Beta. Available online: http://cvxr.com/cvx (accessed on 10 April 2024).
- Tipping, M.E. Sparse Bayesian learning and the relevance vector machine. J. Mach. Learn. 2001, 1, 211–244. [Google Scholar]
- Ji, S.; Xue, Y.; Carin, L. Bayesian compressive sensing. IEEE Trans. Signal Process. 2008, 56, 2346–2356. [Google Scholar] [CrossRef]
- Wipf, D.P.; Rao, B.D. Sparse Bayesian learning for basis selection. IEEE Trans. Signal Process. 2004, 52, 2153–2164. [Google Scholar] [CrossRef]
- Wipf, D.P.; Rao, B.D. An empirical Bayesian strategy for solving the simultaneous sparse approximation problem. IEEE Trans. Signal Process. 2007, 55, 3704–3716. [Google Scholar] [CrossRef]
- Duan, K.Q.; Wang, Z.T.; Xie, W.C.; Chen, H.; Wang, Y.L. Sparsity-based STAP algorithm with multiple measurement vectors via sparse Bayesian learning strategy for airborne radar. IET Signal Process. 2017, 11, 544–553. [Google Scholar] [CrossRef]
- Cui, N.; Xing, K.; Yu, Z.; Duan, K. Tensor-based sparse recovery space-time adaptive processing for large size data clutter suppression in airborne radar. IEEE Trans. Aerosp. Electron. Syst. 2022, 59, 907–922. [Google Scholar] [CrossRef]
- Liu, C.; Wang, T.; Zhang, S.; Ren, B. Clutter suppression based on iterative reweighted methods with multiple measurement vectors for airborne radar. IET Radar Sonar Navig. 2022, 59, 907–922. [Google Scholar] [CrossRef]
- Liu, K.; Wang, T.; Wu, J.; Liu, C.; Cui, W. On the efficient implementation of sparse Bayesian learning-based STAP algorithms. Remote Sens. 2022, 14, 3931. [Google Scholar] [CrossRef]
- Wang, D.; Wang, T.; Cui, W.; Zhang, X. A clutter suppression algorithm via enhanced sparse bayesian learning for airborne radar. IEEE Sens. J. 2023, 23, 10900–10911. [Google Scholar] [CrossRef]
- Cao, J.; Wang, T.; Wang, D. Beam-space post-Doppler reduced-dimension STAP based on sparse Bayesian learning. Remote Sens. 2024, 16, 307. [Google Scholar] [CrossRef]
- Cui, W.; Wang, T.; Wang, D.; Zhang, X. A novel sparse recovery-based space-time adaptive processing algorithm based on gridless sparse Bayesian learning for non-sidelooking airborne radar. IET Radar Sonar Navig. 2023, 17, 1380–1390. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, T.; Wang, D. On efficient maximum likelihood algorithm for clutter suppression. IEEE Signal Process. Lett. 2024, 31, 1399–1403. [Google Scholar] [CrossRef]
- Dunson, D.B. Empirical Bayes density regression. Stat. Sin. 2007, 17, 481–504. [Google Scholar]
- Ji, S.; Dunson, D.; Carin, L. Multitask compressive sensing. IEEE Trans. Signal Process. 2008, 57, 92–106. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, Y.D.; Amin, M.G.; Himed, B. Complex multitask Bayesian compressive sensing. In Proceedings of the 2014 IEEE International Conference on Acoustics, Speech and Signal Processing, Florence, Italy, 4–9 May 2014; pp. 3375–3379. [Google Scholar]
- Golub, G.H.; Van Loan, C.F. Matrix Computations; Johns Hopkins Univ. Press: Baltimore, MD, USA, 2013. [Google Scholar]
- Wipf, D.P.; Nagarajan, S.S. A New View of Automatic Relevance Determination. In Proceedings of the International Conference on Neural Information Processing Systems, Auckland, New Zealand, 25–28 November 2008; Curran Associates Inc.: Red Hook, NY, USA, 2008; pp. 1–9. [Google Scholar]
- Wang, Z.; Xie, W.; Duan, K.; Wang, Y. Clutter suppression algorithm based on fast converging sparse Bayesian learning for airborne radar. Signal Process. 2017, 130, 159–168. [Google Scholar] [CrossRef]
- Robey, F.C.; Fuhrmann, D.R.; Kelly, E.J.; Nitzberg, R. A CFAR adaptive matched filter detector. IEEE Trans. Aerosp. Electron. Syst. 1992, 28, 208–216. [Google Scholar] [CrossRef]
- Liu, W.J.; Liu, J.; Hao, C.; Gao, Y.; Wang, Y.-L. Multichannel adaptive signal detection: Basic theory and literature review. Sci. China Inf. Sci. 2022, 65, 121301. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | The Number of Multiplications in a Single Iteration |
|---|---|
| MOMP-STAP | |
| MFOCUSS-STAP | |
| MIAA-STAP | |
| MSBL-STAP | |
| MANM-STAP | |
| ASMSBL-STAP |
| Parameters | Symbols | Values |
|---|---|---|
| Bandwidth | B | 2.5 M |
| Wavelength | 0.3 m | |
| PRF | 2000 Hz | |
| Velocity of transmit/receive platform | 150 m/s | |
| Height of transmit/receive platform | 9 km | |
| Number of array element of transmit/receive platform | 8 | |
| Pulse number in the CPI of transmit/receive platform | 8 | |
| CNR | CNR | 40 dB |
| Algorithm | Running Time |
|---|---|
| ADC-STAP | 0.2886 s |
| MOMP-STAP | 0.2717 s |
| MFOCUSS-STAP | 4.7805 s |
| MIAA-STAP | 1.3196 s |
| MSBL-STAP | 77.9928 s |
| MANM-STAP | 881.2042 s |
| ASMSBL-STAP | 3.9539 s |
| ASMSBL-STAP | 31.2608 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, K.; Wang, T.; Huang, W. An Efficient Sparse Recovery STAP Algorithm for Airborne Bistatic Radars Based on Atomic Selection under the Bayesian Framework. Remote Sens. 2024, 16, 2534. https://doi.org/10.3390/rs16142534
Liu K, Wang T, Huang W. An Efficient Sparse Recovery STAP Algorithm for Airborne Bistatic Radars Based on Atomic Selection under the Bayesian Framework. Remote Sensing. 2024; 16(14):2534. https://doi.org/10.3390/rs16142534
Chicago/Turabian StyleLiu, Kun, Tong Wang, and Weijun Huang. 2024. "An Efficient Sparse Recovery STAP Algorithm for Airborne Bistatic Radars Based on Atomic Selection under the Bayesian Framework" Remote Sensing 16, no. 14: 2534. https://doi.org/10.3390/rs16142534
APA StyleLiu, K., Wang, T., & Huang, W. (2024). An Efficient Sparse Recovery STAP Algorithm for Airborne Bistatic Radars Based on Atomic Selection under the Bayesian Framework. Remote Sensing, 16(14), 2534. https://doi.org/10.3390/rs16142534