
DEDNet: Dual-Encoder DeeplabV3+ Network for Rock Glacier Recognition Based on Multispectral Remote Sensing Image
 , ,
, ,  ,
,
Abstract
:1. Introduction
2. Study Area and Materials
2.1. Study Area
2.2. Imagery
3. Methodology
3.1. Delineating Rock Glaciers with GF1/6 Images and Google Earth
3.2. Designing the DEDNet
3.3. Training and Validating the DEDNet
3.3.1. Preparing the Training and Validation Dataset
3.3.2. Training and Validating the DEDNet
3.3.3. Evaluating Metrics
3.4. Testing the Well-Trained Model
3.4.1. Preparing the Test Dataset
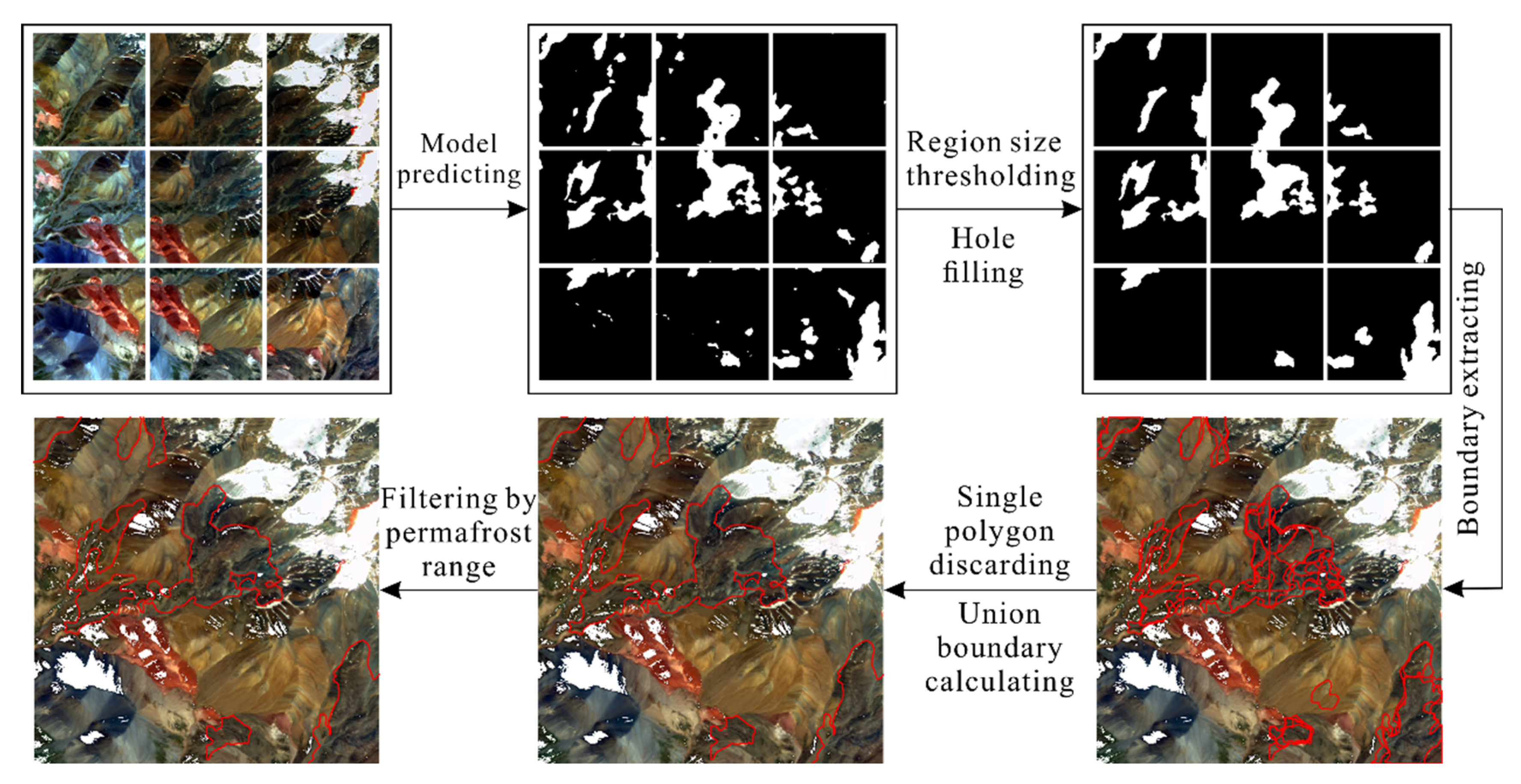
3.4.2. Mapping and Post-Processing Rock Glaciers
3.4.3. Testing Method and Metrics
4. Results
4.1. Mapping Rock Glaciers in VIAs
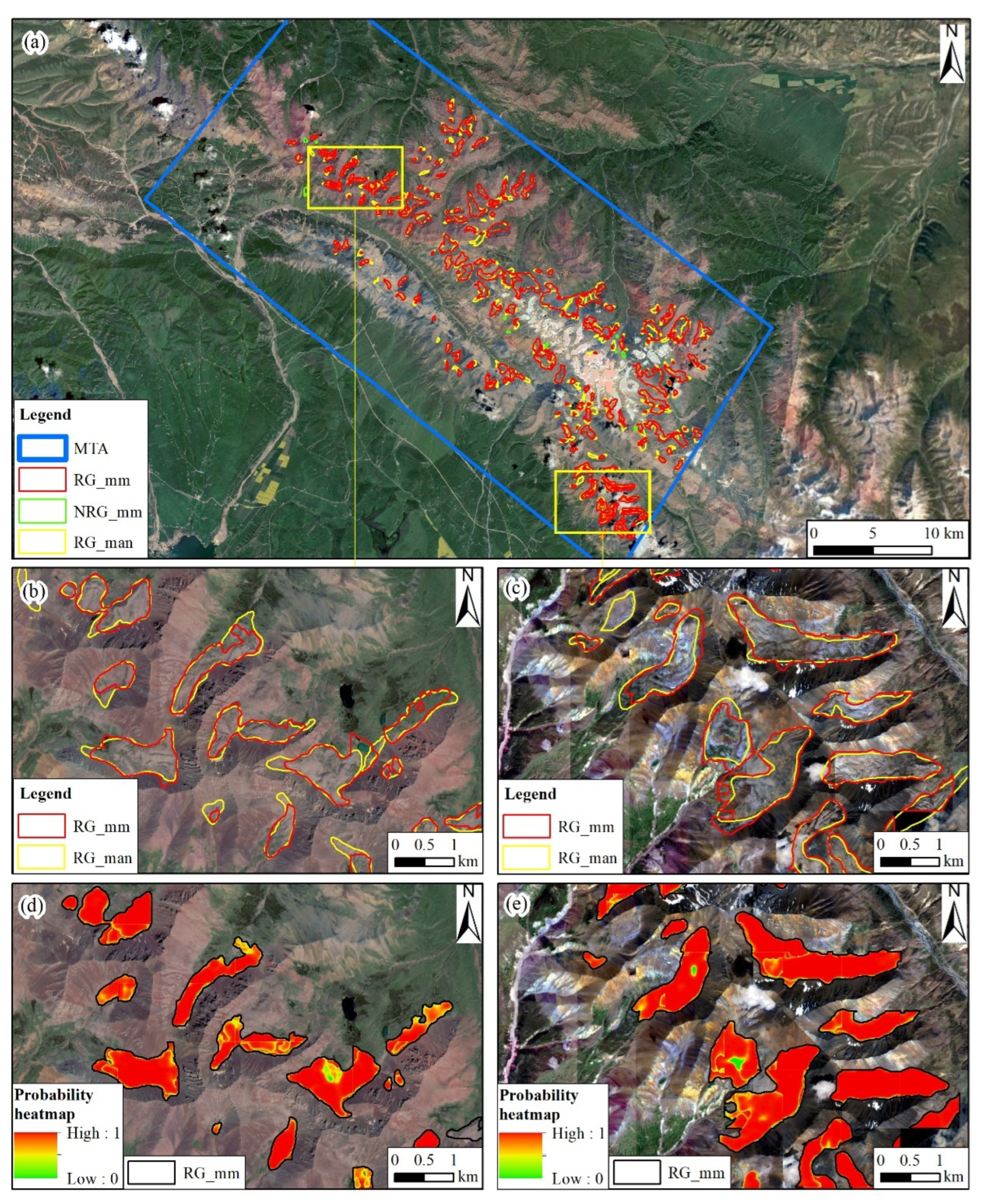
4.2. Mapping Rock Glaciers in MTA
5. Discussion
5.1. Ablation Experiment
5.2. Model Performance Comparison
5.3. Transferability of the Model
5.4. Contribution and Limitation
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Azócar, G.F.; Brenning, A. Hydrological and Geomorphological Significance of Rock Glaciers in the Dry Andes, Chile (27°–33°S): Rock Glaciers in the Dry Andes. Permafr. Periglac. Process. 2010, 21, 42–53. [Google Scholar] [CrossRef]
- Yan, M.; Tian, X.; Li, Z.; Chen, E.; Li, C.; Fan, W. A Long-Term Simulation of Forest Carbon Fluxes over the Qilian Mountains. Int. J. Appl. Earth Obs. Geoinf. 2016, 52, 515–526. [Google Scholar] [CrossRef]
- Jones, D.B.; Harrison, S.; Anderson, K.; Whalley, W.B. Rock Glaciers and Mountain Hydrology: A Review. Earth-Sci. Rev. 2019, 193, 66–90. [Google Scholar] [CrossRef]
- Humlum, O. The Climatic Significance of Rock Glaciers. Permafr. Periglac. Process. 1998, 9, 375–395. [Google Scholar] [CrossRef]
- Humlum, O. Rock Glacier Appearance Level and Rock Glacier Initiation Line Altitude: A Methodological Approach to the Study of Rock Glaciers. Arct. Alp. Res. 1988, 20, 160–178. [Google Scholar] [CrossRef]
- Konrad, S.K.; Humphrey, N.F.; Steig, E.J.; Clark, D.H.; Potter, N.; Pfeffer, W.T. Rock Glacier Dynamics and Paleoclimatic Implications. Geology 1999, 27, 1131. [Google Scholar] [CrossRef]
- Harris, C.; Arenson, L.U.; Christiansen, H.H.; Etzelmüller, B.; Frauenfelder, R.; Gruber, S.; Haeberli, W.; Hauck, C.; Hölzle, M.; Humlum, O.; et al. Permafrost and Climate in Europe: Monitoring and Modelling Thermal, Geomorphological and Geotechnical Responses. Earth-Sci. Rev. 2009, 92, 117–171. [Google Scholar] [CrossRef]
- Petersen, E.I.; Levy, J.S.; Holt, J.W.; Stuurman, C.M. New Insights into Ice Accumulation at Galena Creek Rock Glacier from Radar Imaging of Its Internal Structure. J. Glaciol. 2020, 66, 1–10. [Google Scholar] [CrossRef]
- Bolch, T.; Gorbunov, A.P. Characteristics and Origin of Rock Glaciers in Northern Tien Shan (Kazakhstan/Kyrgyzstan). Permafr. Periglac. Process. 2014, 25, 320–332. [Google Scholar] [CrossRef]
- Feng, M.; Xu, J.; Wang, J.; Ran, Y.; Li, X. Identifying Rock Glacier in Western China Using Deep Learning and Satellite Data. In Proceedings of the AGU Fall Meeting Abstracts, San Francisco, CA, USA, 9–13 December 2019; Volume 2019, p. GC53G-1249. [Google Scholar]
- Marcer, M. Rock Glaciers Automatic Mapping Using Optical Imagery and Convolutional Neural Networks. Permafr. Periglac. Process. 2020, 31, 561–566. [Google Scholar] [CrossRef]
- Robson, B.A.; Bolch, T.; MacDonell, S.; Hölbling, D.; Rastner, P.; Schaffer, N. Automated Detection of Rock Glaciers Using Deep Learning and Object-Based Image Analysis. Remote Sens. Environ. 2020, 250, 112033. [Google Scholar] [CrossRef]
- Hu, Y.; Liu, L.; Huang, L.; Zhao, L.; Wu, T.; Wang, X.; Cai, J. Mapping and Characterizing Rock Glaciers in the Arid West Kunlun of China. Authorea Prepr. 2023. [Google Scholar] [CrossRef]
- Sun, Z.; Hu, Y.; Liu, L.; Racoviteanu, A.; Harrison, S. Mapping Rock Glaciers on the Tibetan Plateau from Planet Basemaps Using Deep Learning. In Proceedings of the AGU Fall Meeting Abstracts, Chicago, IL, USA, 12–16 December 2022; Volume 2022, p. C42E-1078. [Google Scholar]
- Sun, Z.; Hu, Y.; Racoviteanu, A.; Liu, L.; Harrison, S.; Wang, X.; Cai, J.; Guo, X.; He, Y.; Yuan, H. TPRoGI: A Comprehensive Rock Glacier Inventory for the Tibetan Plateau Using Deep Learning. Earth Syst. Sci. Data Discuss. 2024, 2024, 1–32. [Google Scholar]
- Sun, Z.; Hu, Y.; Liu, L.; Racoviteanu, A.; Harrison, S. Mapping and Inventorying Rock Glaciers on the Tibetan Plateau from Planet Basemaps Using Deep Learning. In Proceedings of the EGU General Assembly Conference Abstracts, Vienna, Austria, 23–28 April 2023; p. EGU-6816. [Google Scholar]
- Jiang, J.; Feng, X.; Liu, F.; Xu, Y.; Huang, H. Multi-Spectral RGB-NIR Image Classification Using Double-Channel CNN. IEEE Access 2019, 7, 20607–20613. [Google Scholar] [CrossRef]
- Barsch, D. Permafrost Creep and Rockglaciers. Permafr. Periglac. Process. 1992, 3, 175–188. [Google Scholar] [CrossRef]
- IPA Action Group Rock Glacier Inventories and Kinematics towards Standard Guidelines for Inventorying Rock Glaciers: Baseline Concepts (Version 4.2.2). 2022. 13p. Available online: https://bigweb.unifr.ch/Science/Geosciences/Geomorphology/Pub/Website/IPA/Guidelines/V4/220331_Baseline_Concepts_Inventorying_Rock_Glaciers_V4.2.2.pdf (accessed on 8 September 2023).
- Pan, B.; Shi, Z.; Xu, X.; Shi, T.; Zhang, N.; Zhu, X. CoinNet: Copy Initialization Network for Multispectral Imagery Semantic Segmentation. IEEE Geosci. Remote Sens. Lett. 2019, 16, 816–820. [Google Scholar] [CrossRef]
- Tao, C.; Meng, Y.; Li, J.; Yang, B.; Hu, F.; Li, Y.; Cui, C.; Zhang, W. MSNet: Multispectral Semantic Segmentation Network for Remote Sensing Images. GIScience Remote Sens. 2022, 59, 1177–1198. [Google Scholar] [CrossRef]
- Wang, J.; Sun, K.; Cheng, T.; Jiang, B.; Deng, C.; Zhao, Y.; Liu, D.; Mu, Y.; Tan, M.; Wang, X.; et al. Deep High-Resolution Representation Learning for Visual Recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 43, 3349–3364. [Google Scholar] [CrossRef]
- Yang, X.; Fan, X.; Peng, M.; Guan, Q.; Tang, L. Semantic Segmentation for Remote Sensing Images Based on an AD-HRNet Model. Int. J. Digit. Earth 2022, 15, 2376–2399. [Google Scholar] [CrossRef]
- Wu, H.; Liang, C.; Liu, M.; Wen, Z. Optimized HRNet for Image Semantic Segmentation. Expert Syst. Appl. 2021, 174, 114532. [Google Scholar] [CrossRef]
- Xu, Z.; Zhang, W.; Zhang, T.; Li, J. HRCNet: High-Resolution Context Extraction Network for Semantic Segmentation of Remote Sensing Images. Remote Sens. 2020, 13, 71. [Google Scholar] [CrossRef]
- Whalley, W.B. Enhancing the Digital Earth via Digital Decimal Geolocation and the FAIR Data Principles. Earth Sci. Syst. Soc. 2024, 4, 10110. [Google Scholar] [CrossRef]
- Lou, P.; Wu, T.; Chen, J.; Fu, B.; Zhu, X.; Chen, J.; Wu, X.; Yang, S.; Li, R.; Lin, X.; et al. Recognition of Thaw Slumps Based on Machine Learning and UAVs: A Case Study in the Qilian Mountains, Northeastern Qinghai-Tibet Plateau. Int. J. Appl. Earth Obs. Geoinf. 2023, 116, 103163. [Google Scholar] [CrossRef]
- Hu, Z.; Yan, D.; Feng, M.; Xu, J.; Liang, S.; Sheng, Y. Enhancing Mountainous Permafrost Mapping by Leveraging a Rock Glacier Inventory in Northeastern Tibetan Plateau. Int. J. Digit. Earth 2024, 17, 2304077. [Google Scholar] [CrossRef]
- Gilabert, M.A.; González-Piqueras, J.; García-Haro, F.J.; Meliá, J. A Generalized Soil-Adjusted Vegetation Index. Remote Sens. Environ. 2002, 82, 303–310. [Google Scholar] [CrossRef]
- Jiang, Z.; Huete, A.; Didan, K.; Miura, T. Development of a Two-Band Enhanced Vegetation Index without a Blue Band. Remote Sens. Environ. 2008, 112, 3833–3845. [Google Scholar] [CrossRef]
- Zhu, L.; Ji, D.; Zhu, S.; Gan, W.; Wu, W.; Yan, J. Learning Statistical Texture for Semantic Segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 12975–12984. [Google Scholar]
- Long, J.; Shelhamer, E.; Darrell, T. Fully Convolutional Networks for Semantic Segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Su, R.; Xu, D.; Sheng, L.; Ouyang, W. PCG-TAL: Progressive Cross-Granularity Cooperation for Temporal Action Localization. IEEE Trans. Image Process. 2021, 30, 2103–2113. [Google Scholar] [CrossRef]
- Yan, J.; Liu, J.; Liang, D.; Wang, Y.; Li, J.; Wang, L. Semantic Segmentation of Land Cover in Urban Areas by Fusing Multisource Satellite Image Time Series. IEEE Trans. Geosci. Remote Sens. 2023, 61, 4410315. [Google Scholar] [CrossRef]
- Chen, L.-C.; Papandreou, G.; Kokkinos, I.; Murphy, K.; Yuille, A.L. DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution, and Fully Connected CRFs. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 834–848. [Google Scholar] [CrossRef]
- Zhao, R.; Qian, B.; Zhang, X.; Li, Y.; Wei, R.; Liu, Y.; Pan, Y. Rethinking Dice Loss for Medical Image Segmentation. In Proceedings of the 2020 IEEE International Conference on Data Mining (ICDM), Sorrento, Italy, 17–20 November 2020; pp. 851–860. [Google Scholar]
- Li, J.; Wang, Q.; Zhang, Y.; Yang, S.; Gao, G. An Improved Active Layer Thickness Retrieval Method over Qinghai-Tibet Permafrost Using InSAR Technology: With Emphasis on Two-Dimensional Deformation and Unfrozen Water. Int. J. Appl. Earth Obs. Geoinf. 2023, 124, 103530. [Google Scholar] [CrossRef]
- Carvalho, O.L.F.D.; De Carvalho Júnior, O.A.; Albuquerque, A.O.D.; Bem, P.P.D.; Silva, C.R.; Ferreira, P.H.G.; Moura, R.D.S.D.; Gomes, R.A.T.; Guimarães, R.F.; Borges, D.L. Instance Segmentation for Large, Multi-Channel Remote Sensing Imagery Using Mask-RCNN and a Mosaicking Approach. Remote Sens. 2020, 13, 39. [Google Scholar] [CrossRef]
- Han, W.; Li, J.; Wang, S.; Zhang, X.; Dong, Y.; Fan, R.; Zhang, X.; Wang, L. Geological Remote Sensing Interpretation Using Deep Learning Feature and an Adaptive Multisource Data Fusion Network. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4510314. [Google Scholar] [CrossRef]
- Sun, Y.; Zuo, W.; Liu, M. RTFNet: RGB-Thermal Fusion Network for Semantic Segmentation of Urban Scenes. IEEE Robot. Autom. Lett. 2019, 4, 2576–2583. [Google Scholar] [CrossRef]
- Xu, F.; Shang, Z.; Wu, Q.; Zhang, X.; Lin, Z.; Shao, S. MUFNet: Toward Semantic Segmentation of Multi-Spectral Remote Sensing Images. In Proceedings of the 2021 4th Artificial Intelligence and Cloud Computing Conference, Kyoto Japan, 17–19 December 2021; pp. 39–46. [Google Scholar]
- Ha, Q.; Watanabe, K.; Karasawa, T.; Ushiku, Y.; Harada, T. MFNet: Towards Real-Time Semantic Segmentation for Autonomous Vehicles with Multi-Spectral Scenes. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 5108–5115. [Google Scholar]
- Bertone, A.; Barboux, C.; Bodin, X.; Bolch, T.; Brardinoni, F.; Caduff, R.; Christiansen, H.H.; Darrow, M.M.; Delaloye, R.; Etzelmüller, B.; et al. Incorporating InSAR Kinematics into Rock Glacier Inventories: Insights from 11 Regions Worldwide. Cryosphere 2022, 16, 2769–2792. [Google Scholar] [CrossRef]
- Ran, Z.; Liu, G. Rock Glaciers in Daxue Shan, South-Eastern Tibetan Plateau: An Inventory, Their Distribution, and Their Environmental Controls. Cryosphere 2018, 12, 2327–2340. [Google Scholar] [CrossRef]
- Colucci, R.R.; Forte, E.; Žebre, M.; Maset, E.; Zanettini, C.; Guglielmin, M. Is That a Relict Rock Glacier? Geomorphology 2019, 330, 177–189. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | Sensor | Sensor ID | Resolution |
|---|---|---|---|
| 26 August 2015 | GF1 | GF1_PMS1_E101.4_N37.5_20150826_L1A0000999810 | 2/8 m |
| 26 August 2015 | GF1 | GF1_PMS2_E101.8_N37.4_20150826_L1A0000999891 | |
| 26 August 2015 | GF1 | GF1_PMS2_E101.8_N37.7_20150826_L1A0000999890 | |
| 26 August 2015 | GF1 | GF1_PMS1_E101.5_N37.8_20150826_L1A0000999809 | |
| 28 August 2020 | GF1 | GF1_PMS2_E100.4_N38.2_20200828_L1A0005019914 | |
| 28 August 2020 | GF1 | GF1_PMS1_E100.0_N38.3_20200828_L1A0005019873 | |
| 26 July 2020 | GF1 | GF1_PMS2_E101.4_N37.7_20200726_L1A0004951368 | |
| 28 August 2020 | GF1 | GF1_PMS1_E99.9_N38.0_20200828_L1A0005019874 | |
| 28 August 2020 | GF1 | GF1_PMS2_E100.3_N38.0_20200828_L1A0005019915 | |
| 26 July 2020 | GF1 | GF1_PMS2_E101.4_N37.4_20200726_L1A0004951369 | |
| 29 July 2020 | GF1 | GF1_PMS1_E101.0_N37.5_20200726_L1A0004951209 | |
| 7 September 2021 | GF6 | GF6_PMS_E100.9_N37.3_20210907_L1A1120139417 | |
| 26 August 2020 | GF6 | GF6_PMS_E100.0_N38.7_20200826_L1A1120029769 | |
| 3 May 2020 | GF6 | GF6_PMS_E101.0_N38.0_20200503_L1A1119993834 | |
| 1 June 2021 | GF6 | GF6_PMS_E99.3_N38.0_20210601_L1A1120110250 | |
| 1 August 2021 | GF6 | GF6_PMS_E101.5_N37.3_20210801_L1A1120127842 | |
| 26 August 2020 | GF6 | GF6_PMS_E99.8_N38.0_20200826_L1A1120030072 |
| Metrics | Note | Result |
|---|---|---|
| True positive (TP) | Number of correct RG_mm | 178 |
| False positive (FP) | Number of wrong RG_mm | 11 |
| False negative (FN) | Number of missed RG_man | 12 |
| Producer’s accuracy | TP/(TP + FN) | 0.9368 |
| User’s accuracy | TP/(TP + FP) | 0.9418 |
| Network | RGB | NIR-EVI-SAVI | Block 1 | Block 2 | Negative Sample | mIoU |
|---|---|---|---|---|---|---|
| CDNet | √ | 0.8469 | ||||
| CDNet | √ | 0.8464 | ||||
| DEDNet | √ | √ | √ | 0.8348 | ||
| DEDNet | √ | √ | √ | 0.8509 | ||
| DEDNet | √ | √ | √ | √ | 0.8519 | |
| CDNet | √ | √ | 0.8457 | |||
| DEDNet | √ | √ | √ | √ | √ | 0.8601 |
| Network | Backbone | Pretrained | Accuracy | mIOU | Precision | Recall | Specificity |
|---|---|---|---|---|---|---|---|
| DEDNet | HRNet V2 | True | 0.9131 | 0.8601 | 0.9130 | 0.9270 | 0.9195 |
| CDNet | HRNet V2 | True | 0.9047 | 0.8457 | 0.9045 | 0.9155 | 0.9095 |
| MI_CDNet | HRNet V2 | False | 0.7874 | 0.6944 | 0.7875 | 0.7900 | 0.7885 |
| AC_CDNet | HRNet V2 | True | 0.8073 | 0.7112 | 0.8075 | 0.8020 | 0.8045 |
| MSNet | ResNet 50 | True | 0.9022 | 0.8413 | 0.9025 | 0.9125 | 0.9070 |
| DEDNet | ResNet 50 | True | 0.9056 | 0.8455 | 0.9055 | 0.9145 | 0.9095 |
| DEDNet | ResNet 101 | True | 0.9073 | 0.8490 | 0.9070 | 0.9175 | 0.9112 |
| DEDNet | DRN | True | 0.9062 | 0.8490 | 0.9060 | 0.9190 | 0.9120 |
| DEDNet | Xception | True | 0.7563 | 0.6061 | 0.7560 | 0.6660 | 0.6990 |
| DEDNet | VIT | True | 0.8393 | 0.6405 | 0.8390 | 0.6900 | 0.7395 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, L.; Liu, L.; Liu, M.; Zhang, Q.; Feng, M.; Khalil, Y.S.; Yin, F. DEDNet: Dual-Encoder DeeplabV3+ Network for Rock Glacier Recognition Based on Multispectral Remote Sensing Image. Remote Sens. 2024, 16, 2603. https://doi.org/10.3390/rs16142603
Lin L, Liu L, Liu M, Zhang Q, Feng M, Khalil YS, Yin F. DEDNet: Dual-Encoder DeeplabV3+ Network for Rock Glacier Recognition Based on Multispectral Remote Sensing Image. Remote Sensing. 2024; 16(14):2603. https://doi.org/10.3390/rs16142603
Chicago/Turabian StyleLin, Lujun, Lei Liu, Ming Liu, Qunjia Zhang, Min Feng, Yasir Shaheen Khalil, and Fang Yin. 2024. "DEDNet: Dual-Encoder DeeplabV3+ Network for Rock Glacier Recognition Based on Multispectral Remote Sensing Image" Remote Sensing 16, no. 14: 2603. https://doi.org/10.3390/rs16142603
APA StyleLin, L., Liu, L., Liu, M., Zhang, Q., Feng, M., Khalil, Y. S., & Yin, F. (2024). DEDNet: Dual-Encoder DeeplabV3+ Network for Rock Glacier Recognition Based on Multispectral Remote Sensing Image. Remote Sensing, 16(14), 2603. https://doi.org/10.3390/rs16142603