

A Combination of Remote Sensing Datasets for Coastal Marine Habitat Mapping Using Random Forest Algorithm in Pistolet Bay, Canada
 , and
, and 
Abstract
1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Ground Truth Datasets
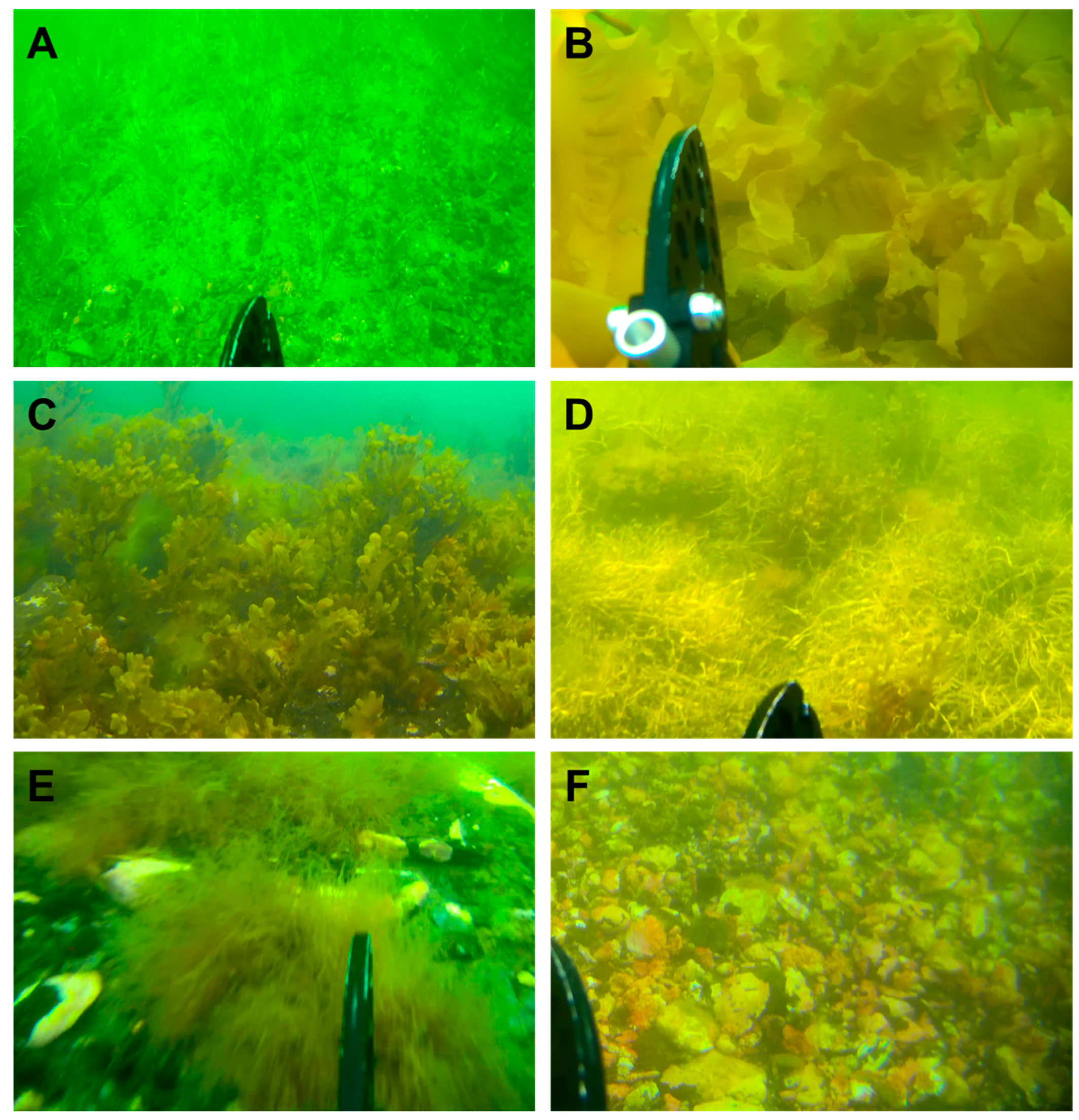
2.2.1. Underwater Survey
Transect Survey
Point Survey
2.2.2. Multispectral Drone Survey
2.2.3. Shoreline Ancillary Survey
2.3. Airborne Bathymetric LiDAR Data
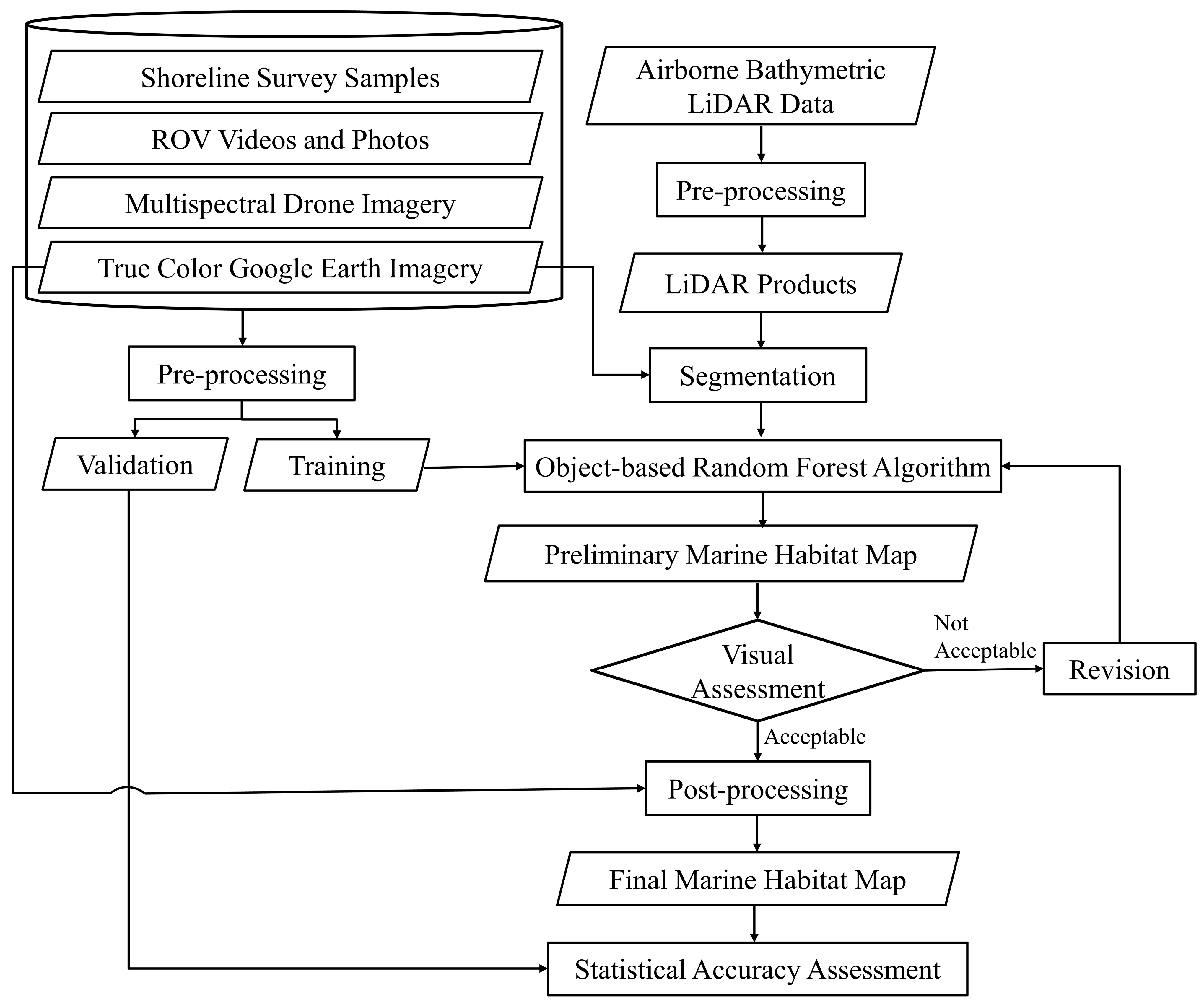
2.4. Methodology
2.4.1. Determining Marine Habitat Classes
General Categorization of Classes
Marine Habitat Classes Considered for Classification
2.4.2. Ground Truth Data Preparation
Generating Polygons from Field Survey Data
Generating Polygons through Visual Interpretation of Multispectral Drone Imagery
Generating Polygons through Visual Interpretation of True Color GE Imagery and Other Products
Total Generated Polygons
2.4.3. Airborne Bathymetric LiDAR Data Processing
2.4.4. Classification
2.4.5. Accuracy Assessment
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Klemas, V. Remote sensing of coastal and ocean currents: An overview. J. Coast. Res. 2012, 28, 576–586. [Google Scholar]
- Rani, M.; Seenipandi, K.; Rehman, S.; Kumar, P.; Sajjad, H. Remote Sensing of Ocean and Coastal Environments; Elsevier: Amsterdam, The Netherlands, 2020. [Google Scholar]
- Koch, E.W. Beyond light: Physical, geological, and geochemical parameters as possible submersed aquatic vegetation habitat requirements. Estuaries 2001, 24, 1–17. [Google Scholar] [CrossRef]
- Klemas, V.V. Remote sensing of submerged aquatic vegetation. In Seafloor Mapping along Continental Shelves: Research and Techniques for Visualizing Benthic Environments; Springer: Cham, Switzerland, 2016; pp. 125–140. [Google Scholar]
- Rowan, G.; Kalacska, M. Remote sensing of submerged aquatic vegetation: An introduction and best practices review. Preprints 2020. [Google Scholar] [CrossRef]
- Amani, M.; Ghorbanian, A.; Asgarimehr, M.; Yekkehkhany, B.; Moghimi, A.; Jin, S.; Naboureh, A.; Mohseni, F.; Mahdavi, S.; Layegh, N.F. Remote sensing systems for ocean: A review (Part 1: Passive systems). IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 15, 210–234. [Google Scholar] [CrossRef]
- Amani, M.; Mohseni, F.; Layegh, N.F.; Nazari, M.E.; Fatolazadeh, F.; Salehi, A.; Ahmadi, S.A.; Ebrahimy, H.; Ghorbanian, A.; Jin, S.; et al. Remote sensing systems for ocean: A review (part 2: Active systems). IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 1421–1453. [Google Scholar] [CrossRef]
- Li, X.; Liu, B.; Zheng, G.; Ren, Y.; Zhang, S.; Liu, Y.; Gao, L.; Liu, Y.; Zhang, B.; Wang, F. Deep-learning-based information mining from ocean remote-sensing imagery. Natl. Sci. Rev. 2020, 7, 1584–1605. [Google Scholar] [CrossRef] [PubMed]
- McCarthy, M.J.; Colna, K.E.; El-Mezayen, M.M.; Laureano-Rosario, A.E.; Méndez-Lázaro, P.; Otis, D.B.; Toro-Farmer, G.; Vega-Rodriguez, M.; Muller-Karger, F.E. Satellite remote sensing for coastal management: A review of successful applications. Environ. Manag. 2017, 60, 323–339. [Google Scholar] [CrossRef] [PubMed]
- Hostetler, C.A.; Behrenfeld, M.J.; Hu, Y.; Hair, J.W.; Schulien, J.A. Spaceborne lidar in the study of marine systems. Ann. Rev. Mar. Sci. 2018, 10, 121–147. [Google Scholar] [CrossRef] [PubMed]
- Le Quilleuc, A.; Collin, A.; Jasinski, M.F.; Devillers, R. Very high-resolution satellite-derived bathymetry and habitat mapping using pleiades-1 and ICESat-2. Remote Sens. 2021, 14, 133. [Google Scholar] [CrossRef]
- Amani, M.; Macdonald, C.; Salehi, A.; Mahdavi, S.; Gullage, M. Marine Habitat Mapping Using Bathymetric LiDAR Data: A Case Study from Bonne Bay, Newfoundland. Water 2022, 14, 3809. [Google Scholar] [CrossRef]
- Conti, L.A.; da Mota, G.T.; Barcellos, R.L. High-resolution optical remote sensing for coastal benthic habitat mapping: A case study of the Suape Estuarine-Bay, Pernambuco, Brazil. Ocean. Coast. Manag. 2020, 193, 105205. [Google Scholar] [CrossRef]
- Brock, J.C.; Purkis, S.J. The emerging role of lidar remote sensing in coastal research and resource management. J. Coast. Res. 2009, 1–5. [Google Scholar] [CrossRef]
- Pe’eri, S.; Long, B. LIDAR technology applied in coastal studies and management. J. Coast. Res. 2011, 1–5. [Google Scholar] [CrossRef]
- Monteiro, J.G.; Jiménez, J.L.; Gizzi, F.; Přikryl, P.; Lefcheck, J.S.; Santos, R.S.; Canning-Clode, J. Novel approach to enhance coastal habitat and biotope mapping with drone aerial imagery analysis. Sci. Rep. 2021, 11, 574. [Google Scholar] [CrossRef] [PubMed]
- Ventura, D.; Bonifazi, A.; Gravina, M.F.; Belluscio, A.; Ardizzone, G. Mapping and classification of ecologically sensitive marine habitats using unmanned aerial vehicle (UAV) imagery and object-based image analysis (OBIA). Remote Sens. 2018, 10, 1331. [Google Scholar] [CrossRef]
- Ventura, D.; Grosso, L.; Pensa, D.; Casoli, E.; Mancini, G.; Valente, T.; Scardi, M.; Rakaj, A. Coastal benthic habitat mapping and monitoring by integrating aerial and water surface low-cost drones. Front. Mar. Sci. 2023, 9, 1096594. [Google Scholar] [CrossRef]
- Greene, H.G. Habitat characterization of a tidal energy site using an ROV: Overcoming difficulties in a harsh environment. Cont. Shelf Res. 2015, 106, 85–96. [Google Scholar] [CrossRef]
- Macreadie, P.I.; McLean, D.L.; Thomson, P.G.; Partridge, J.C.; Jones, D.O.; Gates, A.R.; Benfield, M.C.; Collin, S.P.; Booth, D.J.; Smith, L.L.; et al. Eyes in the sea: Unlocking the mysteries of the ocean using industrial, remotely operated vehicles (ROVs). Sci. Total Environ. 2018, 634, 1077–1091. [Google Scholar] [CrossRef]
- McLean, D.L.; Parsons, M.J.; Gates, A.R.; Benfield, M.C.; Bond, T.; Booth, D.J.; Bunce, M.; Fowler, A.M.; Harvey, E.S.; Macreadie, P.I.; et al. Enhancing the scientific value of industry remotely operated vehicles (ROVs) in our oceans. Front. Mar. Sci. 2020, 7, 220. [Google Scholar] [CrossRef]
- Da Silveira, C.B.L.; Strenzel, G.M.R.; Maida, M.; Gaspar, A.L.B.; Ferreira, B.P. Coral reef mapping with remote sensing and machine learning: A nurture and nature analysis in marine protected areas. Remote Sens. 2021, 13, 2907. [Google Scholar] [CrossRef]
- Papachristopoulou, I.; Filippides, A.; Fakiris, E.; Papatheodorou, G. Vessel-based photographic assessment of beach litter in remote coasts. A wide scale application in Saronikos Gulf, Greece. Mar. Pollut. Bull. 2020, 150, 110684. [Google Scholar] [CrossRef] [PubMed]
- ParksNL. Pistolet Bay Provincial Park. Available online: https://www.parksnl.ca/parks/pistolet-bay-provincial-park/ (accessed on 20 July 2022).
- Wentworth, C.K. A scale of grade and class terms for clastic sediments. J. Geol. 1922, 30, 377–392. [Google Scholar] [CrossRef]
- Gosner, K.L. A Field Guide to the Atlantic Seashore: From the Bay of Fundy to Cape Hatteras; Houghton Mifflin Harcourt: Boston, MA, USA, 1999; Volume 24. [Google Scholar]
- Janowski, L.; Wroblewski, R.; Dworniczak, J.; Kolakowski, M.; Rogowska, K.; Wojcik, M.; Gajewski, J. Offshore benthic habitat mapping based on object-based image analysis and geomorphometric approach. A case study from the Slupsk Bank, Southern Baltic Sea. Sci. Total Environ. 2021, 801, 149712. [Google Scholar] [CrossRef] [PubMed]
- Amani, M.; Salehi, B.; Mahdavi, S.; Granger, J.E.; Brisco, B.; Hanson, A. Wetland classification using multi-source and multi-temporal optical remote sensing data in Newfoundland and Labrador, Canada. Can. J. Remote Sens. 2017, 43, 360–373. [Google Scholar] [CrossRef]
- McLaren, K.; McIntyre, K.; Prospere, K. Using the random forest algorithm to integrate hydroacoustic data with satellite images to improve the mapping of shallow nearshore benthic features in a marine protected area in Jamaica. GIsci. Remote Sens. 2019, 56, 1065–1092. [Google Scholar] [CrossRef]
- Wicaksono, P.; Aryaguna, P.A.; Lazuardi, W. Benthic habitat mapping model and cross validation using machine-learning classification algorithms. Remote Sens. 2019, 11, 1279. [Google Scholar] [CrossRef]
- Cohen, J. A coefficient of agreement for nominal scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Randell, Z.; Kenner, M.; Tomoleoni, J.; Yee, J.; Novak, M. Kelp-forest dynamics controlled by substrate complexity. Proc. Natl. Acad. Sci. USA 2022, 119, e2103483119. [Google Scholar] [CrossRef] [PubMed]
- Mathieson, A.C.; Dawes, C.J. Seaweeds of the Northwest Atlantic; University Massachusetts Press: Amherst, MA, USA, 2017. [Google Scholar]
- Eriander, L.; Infantes, E.; Olofsson, M.; Olsen, J.L.; Moksnes, P.-O. Assessing methods for restoration of eelgrass (Zostera marina L.) in a cold temperate region. J. Exp. Mar. Biol. Ecol. 2016, 479, 76–88. [Google Scholar] [CrossRef]
- Pratomo, D.G.; Putranto, B.F.E. Analysis of the green light penetration from Airborne LiDAR Bathymetry in Shallow Water Area. IOP Conf. Ser. Earth Environ. Sci. 2019, 389, 012003. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Substrate Class | Substrate Type | Definition |
|---|---|---|
| Bedrock | Continuous solid bedrock | |
| Coarse | Boulder | Rocks greater than 250 mm |
| Rubble | Rocks ranging from 130 mm to 250 mm | |
| Medium | Cobble | Rocks ranging from 30 mm to 130 mm |
| Gravel | Granule size or coarser, 2 mm to 30 mm | |
| Fine | Sand | Fine deposits ranging from 0.06 mm to 2 mm |
| Mud | Material encompassing both silt and clay < 0.06 mm | |
| Organic/Detritus | A soft material containing 85 percent or more organic materials | |
| Shells | Calcareous remains of shellfish or invertebrates containing shells | |
| Category | Group | Species |
|---|---|---|
| Brown Algae | Kelp (Laminariaceae) | Agarum clathratum Alaria esculenta Laminaria digitata/Hedophyllum nigripes Saccharina lattisima |
| Sourweed (Desmarestiaceae) | Desmarestia aculeata | |
| Brown Filamentous Algae (Phaeophyceae) | ||
| Rockweed (Fucaceae) | Ascophyllum nodosum Fucus sp. Fucus vesiculosus | |
| Red Algae | Coralline Algae (Corallinaceae) | Lithothamnion sp. |
| Seagrass | Eelgrass (Zosteraceae) | Zostera marina |
| Other species | Ulva sp. Ptilota sp. Green filamentous algae | |
| Primary Category | Definition |
|---|---|
| Eelgrass | Area dominated by eelgrass (>75% coverage). |
| Kelp | Area dominated by kelp species (>75% coverage). Substrate may not be visible. Kelp may be comprised of multiple species. |
| Non-Vegetation | Non-Vegetation areas with little to no flora coverage (<50%). Secondary category dependent on dominant substrate type and includes fine (mud, sand), medium (gravel, cobble), coarse (rubble, boulder), and bedrock substrates. |
| Other Vegetation | Areas dominated by other flora species (>75%). Secondary category describes dominant flora. Dominant substrate may vary. |
| Rockweed | Area dominated by rockweeds (>75% coverage). May be either dominated by Fucus sp. or Ascophyllum sp. or be a mixture of both. |
| Class | Number of Ground Truth Polygons | Total Area (m2) |
|---|---|---|
| Non-Vegetation | 37 | 516,755 |
| Eelgrass | 3 | 77,513 |
| Rockweed | 4 | 52,204 |
| Kelp | 4 | 72,472 |
| Other Vegetation | 6 | 27,043 |
| Class | Number of Ground Truth Polygons | Total Area (m2) |
|---|---|---|
| Non-Vegetation | 39 | 144,859 |
| Eelgrass | 2 | 16,742 |
| Rockweed | 37 | 59,963 |
| Kelp | 0 | 0 |
| Other Vegetation | 20 | 5308 |
| Class | Number of Ground Truth Polygons | Total Area (m2) |
|---|---|---|
| Non-Vegetation | 24 | 382,554 |
| Eelgrass | 5 | 61,396 |
| Rockweed | 18 | 202,401 |
| Kelp | 3 | 38,320 |
| Other Vegetation | 2 | 9130 |
| Class | Number of Ground Truth Polygons | Total Area (m2) |
|---|---|---|
| Non-Vegetation | 100 | 1,044,167 |
| Eelgrass | 10 | 155,652 |
| Rockweed | 59 | 314,569 |
| Kelp | 7 | 110,792 |
| Other Vegetation | 28 | 41,481 |
| Class | Area (km2) | Percentage Area (%) |
|---|---|---|
| Rockweed | 17.89 | 11.09 |
| Kelp | 36.93 | 22.89 |
| Other Vegetation | 14.64 | 9.07 |
| Eelgrass | 16.65 | 10.32 |
| Non-Vegetation | 75.23 | 46.63 |
| Mapped Class | Ground Truth Validation Sample | ||||||||
| Rockweed | Kelp | Other Vegetation | Eelgrass | Non-Vegetation | Row Total | UA (%) | CE (%) | ||
| Rockweed | 55,200 | 0 | 88 | 70 | 8183 | 63,541 | 86.87 | 13.13 | |
| Kelp | 0 | 30,499 | 0 | 0 | 42 | 30,541 | 99.86 | 0.14 | |
| Other Vegetation | 974 | 0 | 333 | 747 | 107 | 2161 | 15.41 | 84.59 | |
| Eelgrass | 77 | 0 | 0 | 80,601 | 250 | 80,928 | 99.60 | 0.40 | |
| Non-Vegetation | 24,318 | 754 | 11 | 8775 | 185,577 | 219,435 | 84.57 | 15.43 | |
| Column Total | 80,569 | 31,253 | 432 | 90,193 | 194,159 | 396,606 | |||
| PA (%) | 68.51 | 97.59 | 77.08 | 89.37 | 95.57 | ||||
| OE (%) | 31.49 | 2.41 | 22.92 | 10.63 | 4.43 | OA = 88.81% KC = 0.83 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mahdavi, S.; Amani, M.; Parsian, S.; MacDonald, C.; Teasdale, M.; So, J.; Zhang, F.; Gullage, M. A Combination of Remote Sensing Datasets for Coastal Marine Habitat Mapping Using Random Forest Algorithm in Pistolet Bay, Canada. Remote Sens. 2024, 16, 2654. https://doi.org/10.3390/rs16142654
Mahdavi S, Amani M, Parsian S, MacDonald C, Teasdale M, So J, Zhang F, Gullage M. A Combination of Remote Sensing Datasets for Coastal Marine Habitat Mapping Using Random Forest Algorithm in Pistolet Bay, Canada. Remote Sensing. 2024; 16(14):2654. https://doi.org/10.3390/rs16142654
Chicago/Turabian StyleMahdavi, Sahel, Meisam Amani, Saeid Parsian, Candace MacDonald, Michael Teasdale, Justin So, Fan Zhang, and Mardi Gullage. 2024. "A Combination of Remote Sensing Datasets for Coastal Marine Habitat Mapping Using Random Forest Algorithm in Pistolet Bay, Canada" Remote Sensing 16, no. 14: 2654. https://doi.org/10.3390/rs16142654
APA StyleMahdavi, S., Amani, M., Parsian, S., MacDonald, C., Teasdale, M., So, J., Zhang, F., & Gullage, M. (2024). A Combination of Remote Sensing Datasets for Coastal Marine Habitat Mapping Using Random Forest Algorithm in Pistolet Bay, Canada. Remote Sensing, 16(14), 2654. https://doi.org/10.3390/rs16142654