
Interrupted-Sampling Repeater Jamming Countermeasure Based on Intrapulse Frequency–Coded Joint Frequency Modulation Slope Agile Waveform
 , ,
, ,
Abstract
:1. Introduction
- (1)
- A novel intrapulse frequency-coded joint FM slope agile waveform is designed. Dual-parameter agility can reduce the correlation between subpulses. The inserted delay between adjacent subpulses considers the engineering needs of parameter updating and logical reset during waveform generation. The ambiguity function diagram of the transmitted waveform is approximately the ideal thumbtack type.
- (2)
- The proposed method makes full use of the echo data. The target and interference in the interfered echo slices are reconstructed by the compressed sensing method, which reduces the target energy loss. The range sidelobes of the echo PC output are suppressed by the time-domain narrowband filter constructed from the interference-free echo slices, which improves the interference suppression performance at high jamming-to-signal ratio (JSR).
- (3)
- The proposed method has a good suppression effect on three typical types of ISRJ generated by jammer synchronous and non-synchronous sampling scenarios.
2. Signal Model
2.1. Intrapulse Frequency-Coded Joint FM Slope Agile Waveform
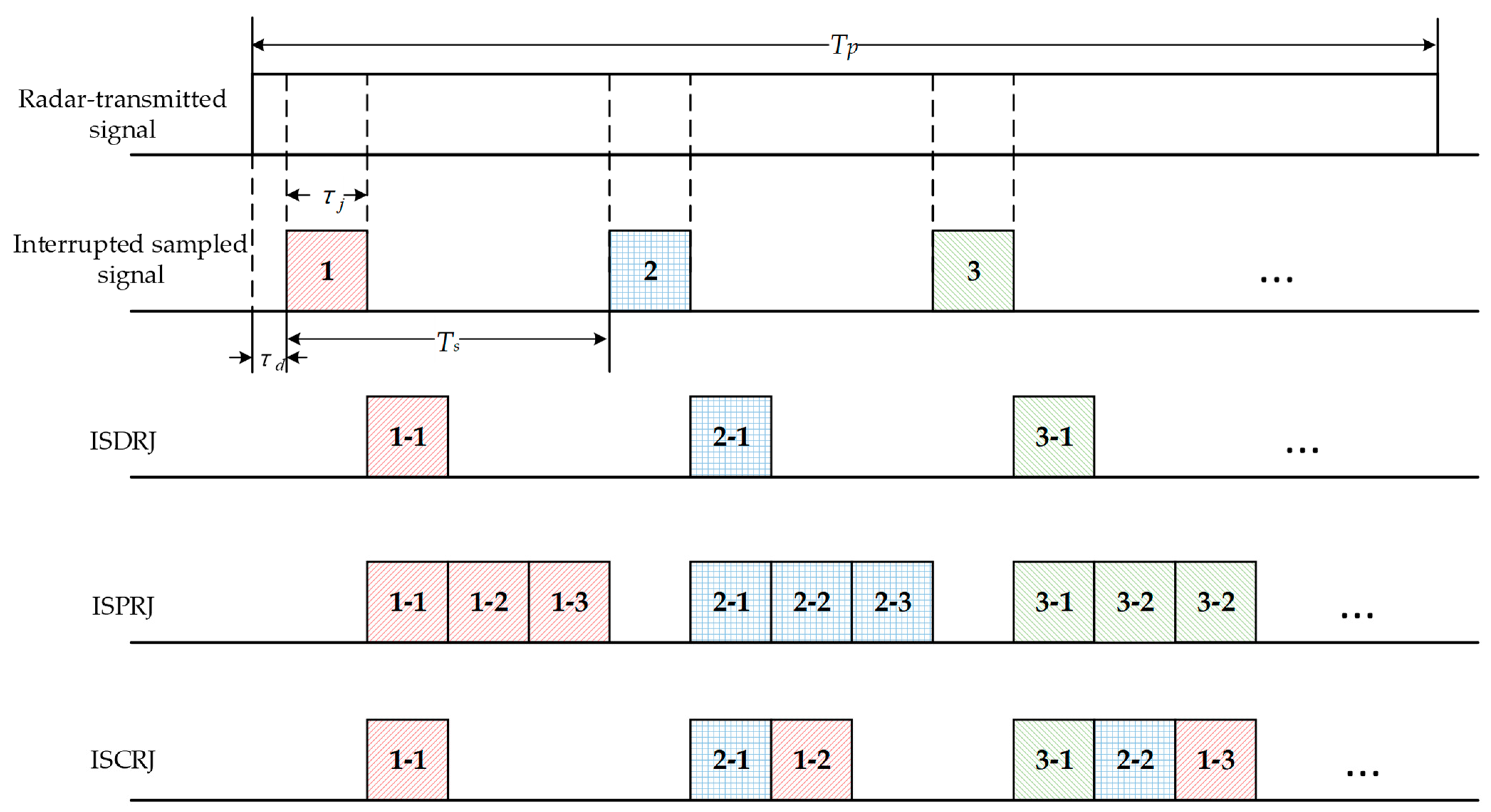
2.2. ISRJ Model
2.3. Echo Signal Model
3. Dual-Parameter Agile Waveform Characteristics Analysis
4. ISRJ Suppression Method
4.1. Interfered Echo Slice Identification Based on FrFT
4.2. Interference Suppression Based on Signal Reconstruction Joint Time-Domain Filtering
- I.
- Time-domain preliminary filtering. The echo signal is divided into several slices according to the width of the transmitted signal subpulse. According to the delay position inserted between the adjacent subpulses, the echo signal at the corresponding position is zeroed.
- II.
- Echo slice classification. Each remaining echo slice is classified to determine whether it is an interfered echo slice or an interference-free echo slice. The specific steps are as follows:
- (a)
- The set of echo slices to be classified is . Set the fractional order traversal range to 0~2 and the step size to . The FrFT of each echo slice is traversed to find the fractional order corresponding to the maximum FrFT output of the echo slice. The pseudo-code of the specific algorithm (Algorithm 1) is as follows:
Algorithm 1: Fractional Order Search Input: echo slice set , number of slices , upper and lower bounds for order traversal D,
step size
Output: optimal fractional order set of echo slices .
Initialize: ;1: for (i =1 to ) do 2: for (p = 0 to 2 with step size ) do 3: Compute the FrFT of at order p according to Equation (9); 4: end for 5: Search for the maximum value of the FrFT of in the traversal range; 6: ; // is the FrFT operator at order p 7: end for 8: return - (b)
- The optimal transform orders of the subpulses in the radar-transmitted signal are known as the prior information. The optimal transform order set of the transmitted subpulses is denoted as . Comparing the optimal order set of the echo slice in step 2.1 with , the error of the ith slice is . Set the threshold to . When , it is judged that the echo slice contains only the target, and when , it is judged that the echo slice is jammed.
- III.
- Signal reconstruction. After step 2, we know the optimal transform orders of the interference and the target in interfered echo slices. According to the focusing property of FrFT for chirp signals, the FrFT outputs of the target and interference signal are approximately sparse under their respective optimal transform order. Therefore, the fractional sparse matrix can be constructed, and the target and interference can be reconstructed by the compressed sensing algorithm. The specific steps are as follows:
- (a)
- Target-jamming joint dictionary construction. We used the Pei-type discrete FrFT algorithm [29] to construct the sparse matrix. Take the sparse matrix construction of as an example.
- (b)
- Observation of interfered echo slice. The observation matrix has rows and columns, and ≪. is an independent and identically distributed Gaussian random matrix. The observed signal vector obtained by measuring the ith echo slice is
- (c)
- The solution of can be converted to the following norm optimization problem, i.e.,
- IV.
- Reconstruct the target and interference in each interfered echo slice. Subsequently, the echo signal after target reconstruction is obtained as .
- V.
- Further time-domain filtering. The interference-free echo slices identified in step 2 are extracted and noted as . Convolve with the radar-transmitted signal, and a normalized time-domain filter [22] is constructed as
5. Simulation Result
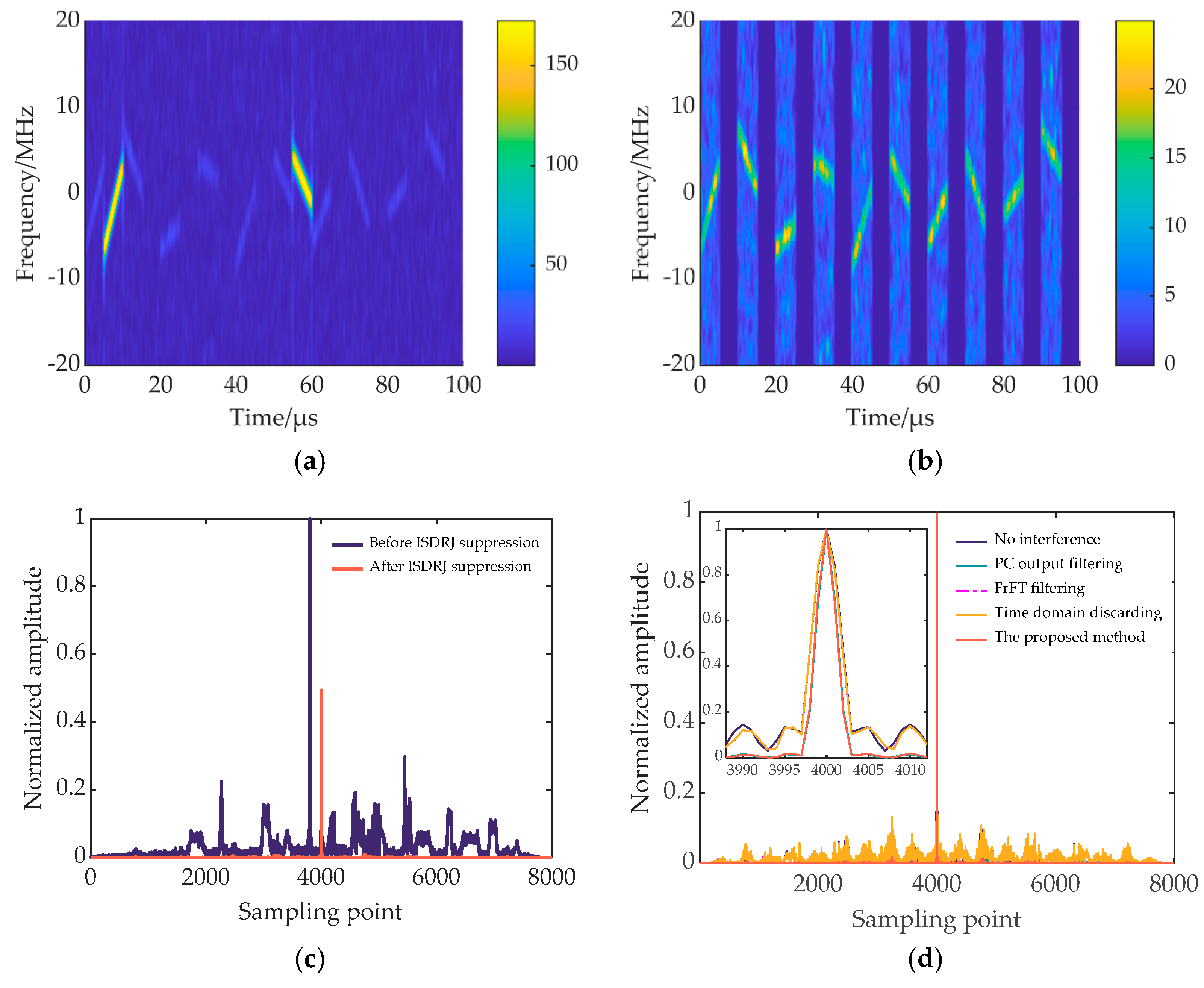
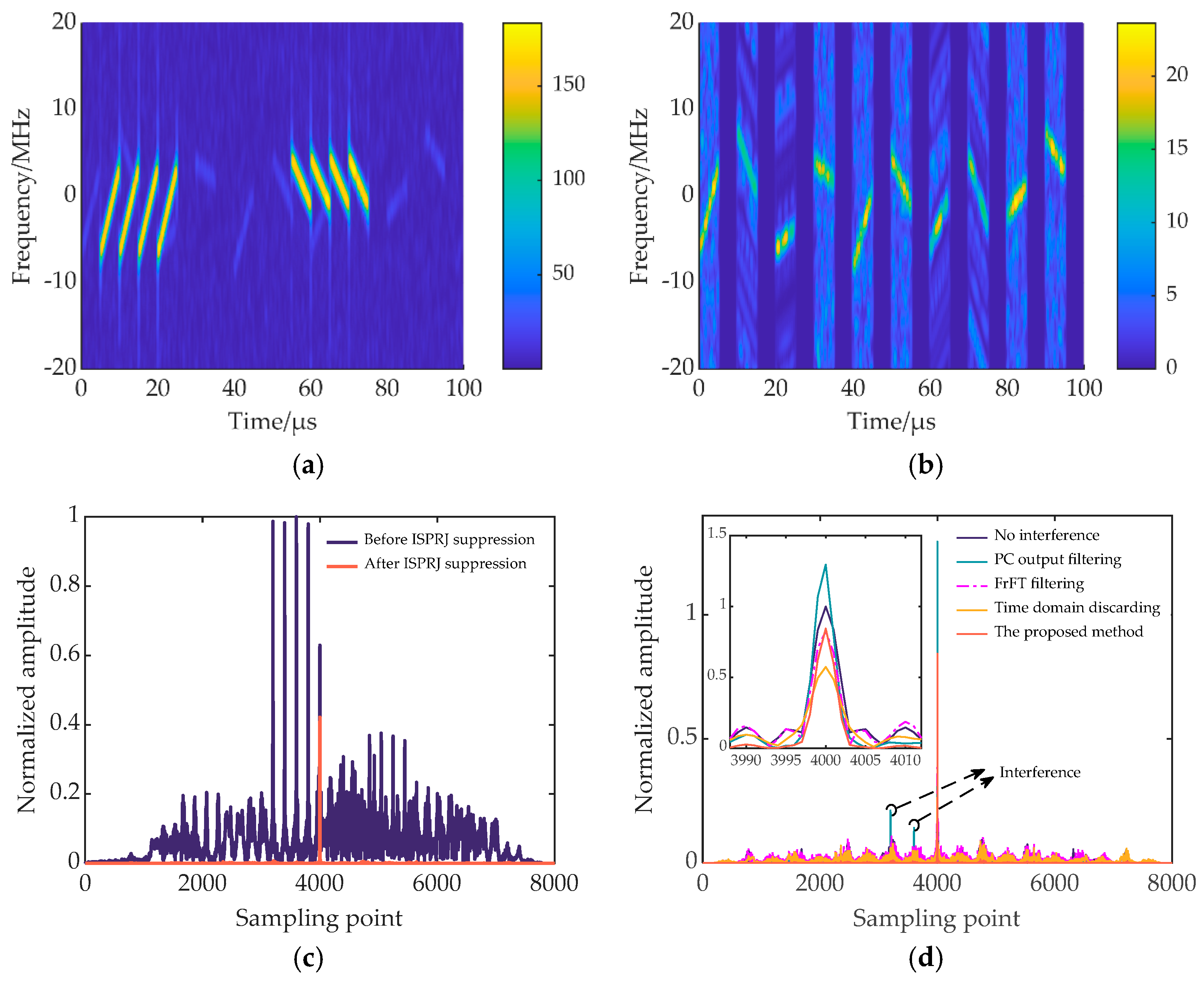
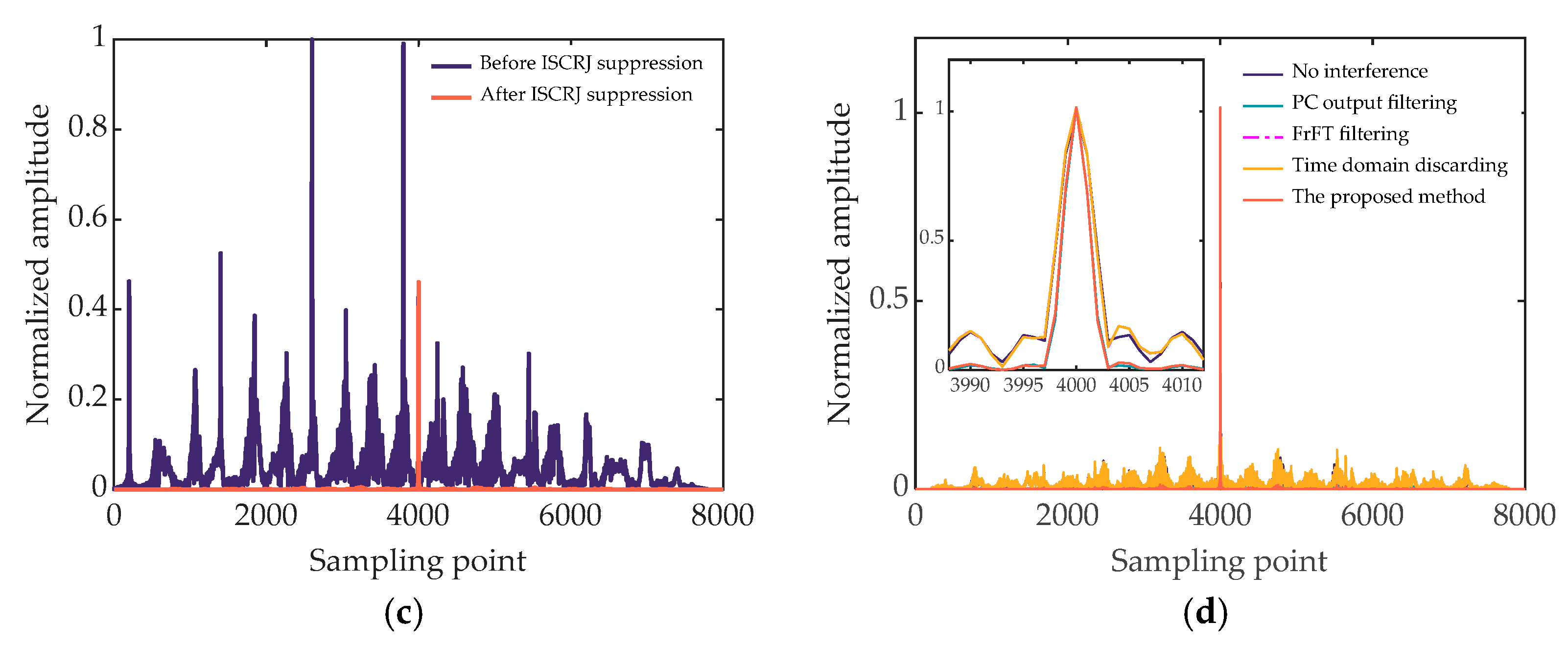
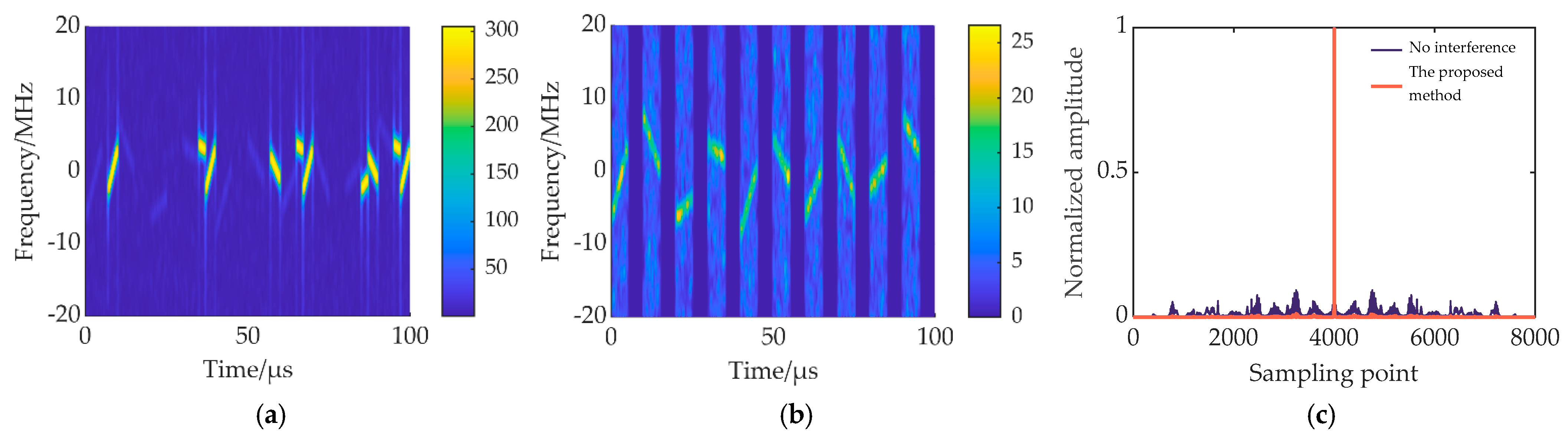
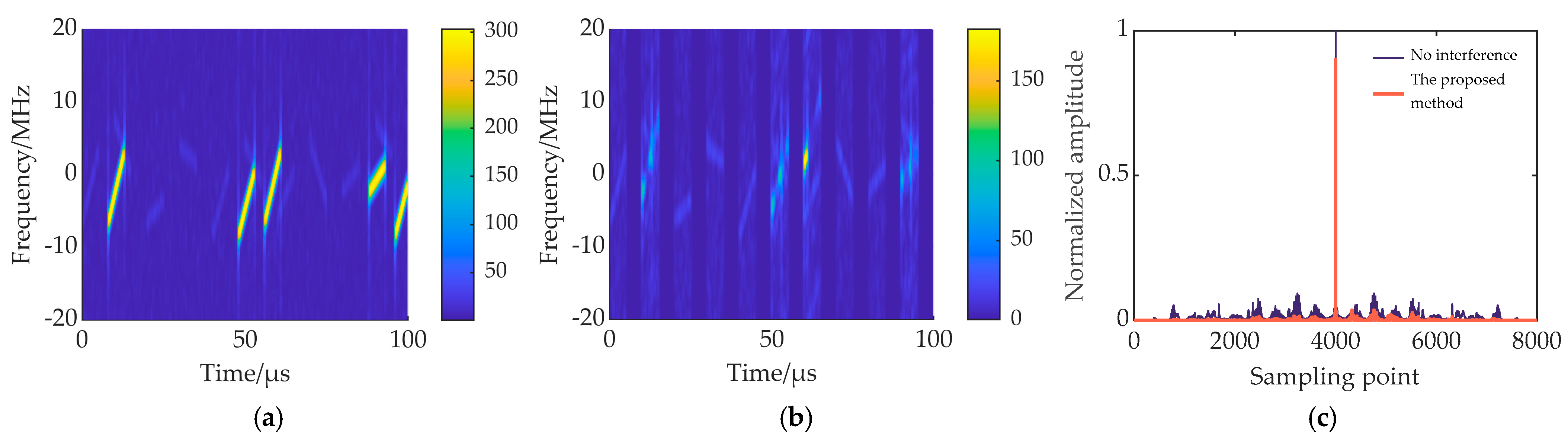
5.1. Interference Suppression Effect
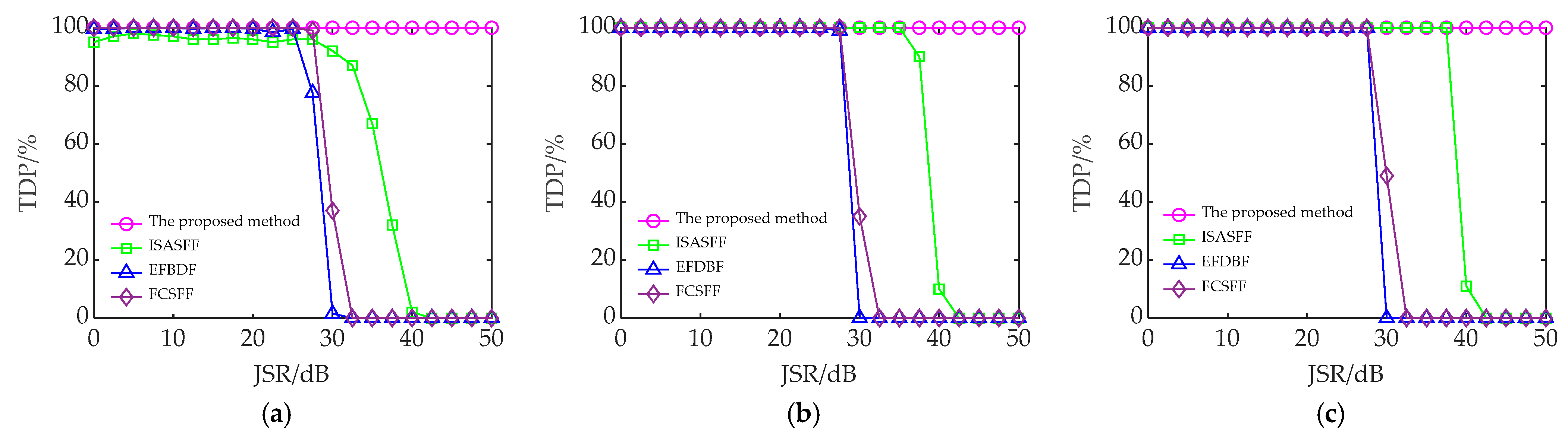
5.2. Performance Analysis of the Proposed Method
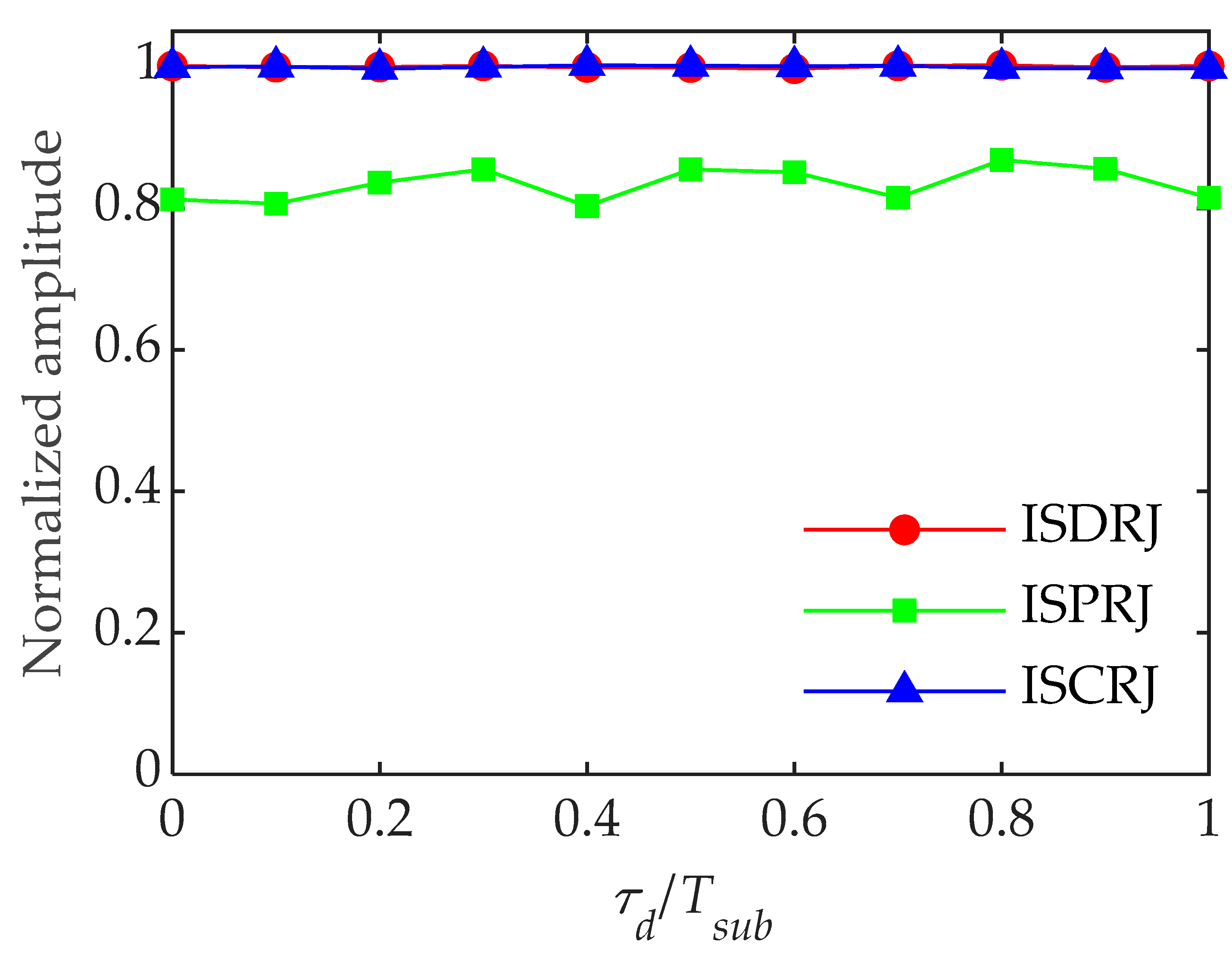
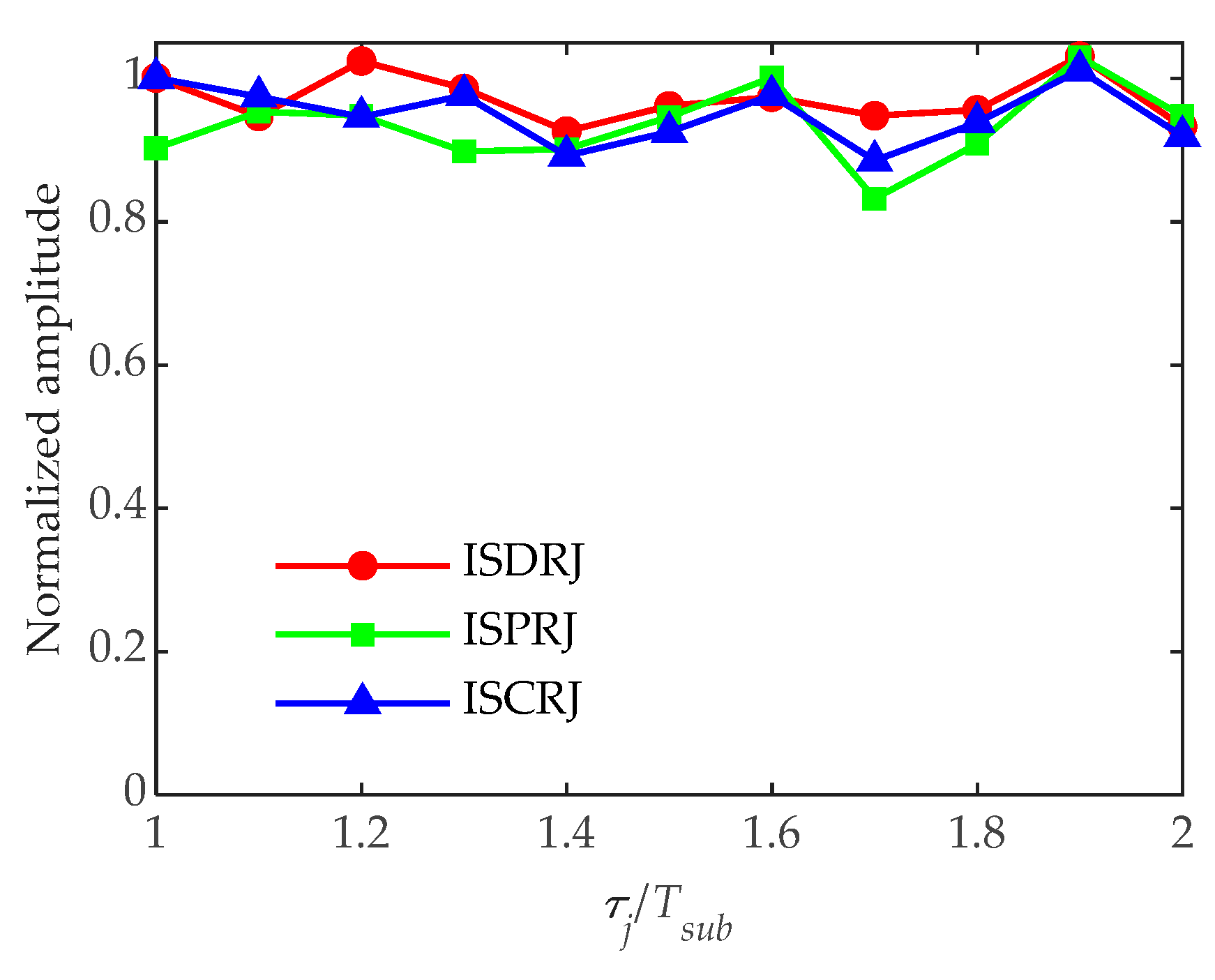
5.3. Influence of Jammer Sampling Delay
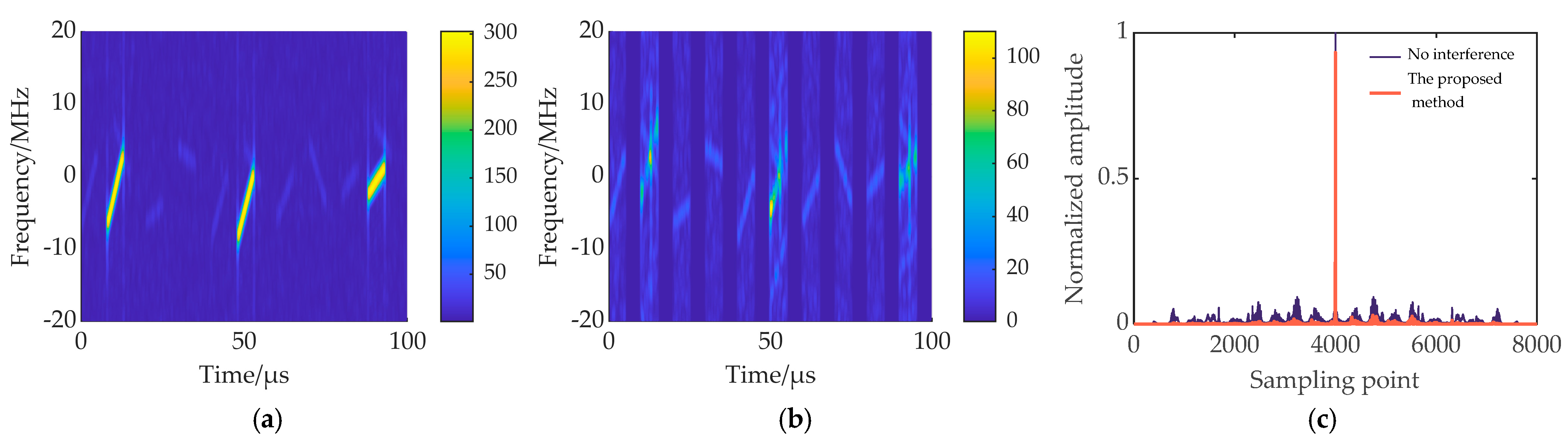
5.4. Influence of Jammer Sampling Pulse Width
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Riabukha, V.P.; Semeniaka, A.V.; Katiushyn, Y.A.; Atamanskiy, D.V. Pulse DRFM Jamming Formation and Its Mathematical Simulation. In Proceedings of the 2022 IEEE 2nd Ukrainian Microwave Week (UkrMW), Kharkiv, Ukraine, 14–18 November 2022; pp. 654–659. [Google Scholar]
- Hanbali, S.B.S.; Kastantin, R. A review of self-protection deceptive jamming against chirp radars. Int. J. Microw. Wirel. Technol. 2017, 9, 1853–1861. [Google Scholar] [CrossRef]
- Wang, X.; Liu, J.; Zhang, W.; Fu, Q.; Liu, Z.; Xie, X. Mathematic principles of interrupted-sampling repeater jamming (ISRJ). Sci. China Ser. F Inf. Sci. 2007, 50, 113–123. [Google Scholar] [CrossRef]
- Lan, L.; Marino, A.; Aubry, A.; Maio, A.D.; Liao, G.; Xu, J.; Zhang, Y. GLRT-Based Adaptive Target Detection in FDA-MIMO Radar. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 597–613. [Google Scholar] [CrossRef]
- Lan, L.; Xu, J.; Liao, G.; Zhang, Y.; Fioranelli, F.; So, H.C. Suppression of Mainbeam Deceptive Jammer With FDA-MIMO Radar. IEEE Trans. Veh. Technol. 2020, 69, 11584–11598. [Google Scholar] [CrossRef]
- Wang, X.; Chen, H.; Ni, M.; Ni, L.; Li, B. Radar anti-false target jamming method based on phase modulation. Syst. Eng. Electron. 2021, 43, 2476–2483. [Google Scholar]
- Wang, X.; Chen, H.; Ni, L.; Ni, M.; Shen, W.; Zhang, J. False target suppression method based on stepped frequency and Doppler filtering. In Proceedings of the ICFEICT 2021: International Conference on Frontiers of Electronics, Information and Computation Technologies, Changsha, China, 21–23 May 2021; pp. 1–5. [Google Scholar]
- Yuan, H.; Wang, C.; Li, X.; An, L. A Method against Interrupted-Sampling Repeater Jamming Based on Energy Function Detection and Band-Pass Filtering. Int. J. Antennas Propag. 2017, 2017, 6759169. [Google Scholar] [CrossRef]
- Chen, J.; Wu, W.; Xu, S.; Chen, Z.; Zou, J. Band pass filter design against interrupted-sampling repeater jamming based on time-frequency analysis. IET Radar Sonar Navig. 2019, 13, 1646–1654. [Google Scholar] [CrossRef]
- Wang, Z.; Li, J.; Yu, W.; Luo, Y.; Zhao, Y.; Yu, Z. Energy function-guided histogram analysis for interrupted sampling repeater jamming suppression. Electron. Lett. 2023, 59, e12778. [Google Scholar] [CrossRef]
- Yang, S.; Tian, B.; Zhou, R. ECCM against Interrupted Sampling Repeater Jamming based on Time-frequency Analysis. J. Signal Process. 2016, 32, 1244–1251. [Google Scholar] [CrossRef]
- Wan, P.; Bai, W.; Fu, X. Fractional Fourier Transform-based LFM Radars for Countering Interrupted-sampling Repeater Jamming. Fire Control Command Control 2018, 43, 35–39. [Google Scholar]
- Zhang, J.; Mu, H.; Wen, S.; Li, Y.; Gao, H. Anti-Intermittent Sampling Repeater Jamming Method Based on LFM Segmented Pulse Compression. J. Electron. Inf. Technol. 2019, 41, 1712–1720. [Google Scholar] [CrossRef]
- Zhou, C.; Liu, Q.; Chen, X. Parameter estimation and suppression for DRFM-based interrupted sampling repeater jammer. IET Radar Sonar Navig. 2018, 12, 56–63. [Google Scholar] [CrossRef]
- Zhou, C.; Liu, Q.; Hu, C. Time-frequency analysis techniques for recognition and suppression of interrupted sampling repeater jamming. J. Radars 2019, 8, 100–106. [Google Scholar] [CrossRef]
- Lu, L.; Gao, M. An Improved Sliding Matched Filter Method for Interrupted Sampling Repeater Jamming Suppression Based on Jamming Reconstruction. IEEE Sens. J. 2022, 22, 9675–9684. [Google Scholar] [CrossRef]
- Zhou, K.; He, F.; Su, Y. Fast algorithm for joint waveform and filter design against interrupted sampling repeater jamming. J. Radars 2022, 11, 264–277. [Google Scholar] [CrossRef]
- Zhou, K.; Li, D.; Su, Y.; Liu, T. Joint Design of Transmit Waveform and Mismatch Filter in the Presence of Interrupted Sampling Repeater Jamming. IEEE Signal Process. Lett. 2020, 27, 1610–1614. [Google Scholar] [CrossRef]
- Wang, F.; Li, N.; Pang, C.; Li, C.; Li, Y.; Wang, X. Complementary Sequences and Receiving Filters Design for Suppressing Interrupted Sampling Repeater Jamming. IEEE Geosci. Remote Sens. Lett. 2022, 19, 4022305. [Google Scholar] [CrossRef]
- Yu, T.; Zhou, Z.; Du, X.; Bao, Q.; He, Y. An Anti-Interrupted Sampling Repeater Jamming Method Based on Complete Complementary Code Waveform Design. J. Electron. Inf. Technol. 2023, 45, 3896–3905. [Google Scholar] [CrossRef]
- Zhang, J.; Mu, H.; Wen, S.; Li, Y. Anti interrupted-sampling repeater jamming method based on stepped LFM waveform. Syst. Eng. Electron. 2019, 41, 1013–1020. [Google Scholar] [CrossRef]
- Du, S.; Liu, Z.; Wu, Y.; Sha, M.; Quan, Y. Frequency agility waveform combined with time-frequency filter to suppress interrupted-sampling repeater jamming. Syst. Eng. Electron. 2023, 45, 3819–3827. [Google Scholar] [CrossRef]
- Dong, S.; Wu, Y.; Fang, W.; Quan, Y. Anti-interrupted sampling repeater jamming method based on frequency-agile radar joint fuzzy C-means. J. Radars 2022, 11, 289–300. [Google Scholar] [CrossRef]
- Liu, Z.; Du, S.; Wu, Y.; Sha, M.; Xing, M.; Quan, Y. Anti-interrupted sampling repeater jamming method for interpulse and intrapulse frequency-agile radar. J. Radars 2022, 11, 301–312. [Google Scholar] [CrossRef]
- Wang, X.; Li, B.; Liu, W.; Chen, H.; Zhu, Y.; Ni, M. Anti-interrupted Sampling Repeater Jamming Based on Intra-pulse Frequency Modulation Slope Agile Radar Waveform Joint FrFT. Digit. Signal Process. 2024, 147, 104418. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, G.; Zhang, X.; Li, S.; Xin, T. Interrupted-sampling repeater jamming adaptive suppression algorithm based on fractional dictionary. Syst. Eng. Electron. 2020, 42, 1439–1448. [Google Scholar] [CrossRef]
- Nadav, L.; Eli, M. Ambiguity Function. In Radar Signals; IEEE: New York, NY, USA, 2004; pp. 34–52. [Google Scholar]
- Almeida, L.B. The fractional Fourier transform and time-frequency representations. IEEE Trans. Signal Process. 1994, 42, 3084–3091. [Google Scholar] [CrossRef]
- Ozaktas, H.M.; Arikan, O.; Kutay, M.A.; Bozdagt, G. Digital computation of the fractional Fourier transform. IEEE Trans. Signal Process. 1996, 44, 2141–2150. [Google Scholar] [CrossRef]
- Fang, B.; Huang, G.; Gao, J.; Zuo, W. Compressive sensing of linear frequency modulated echo signals in fractional Fourier domains. J. Xidian Univ. 2015, 42, 200–206. [Google Scholar] [CrossRef]
- Wang, X.; Chen, H.; Liu, W.; Zhang, L.; Li, B.; Ni, M. Echo Preprocessing-Based Smeared Spectrum Interference Suppression. Electronics 2023, 12, 3690. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Radar-transmitted waveform duration | 100 μs | |
| Subpulse duration | 5 μs | |
| Inserted delay duration | 5 μs | |
| The number of subpulses | 10 | |
| Minimum bandwidth of subpulse | 2 MHz | |
| Maximum bandwidth of subpulse | 10 MHz | |
| Maximum carrier frequency interval of subpulse | 10 MHz | |
| Sampling frequency | 40 MHz | |
| Jammer sampling pulse width | 5 μs | |
| Interrupted-sampling repetition period | 25 μs | |
| Subpulse bandwidth coding sequence | a | [10,7,2,1,9,5,6,8,3,4] |
| Subpulse frequency coding sequence | b | [4,9,1,8,2,7,3,6,5,10] |
| Jamming-to-signal ratio | JSR | 20 dB |
| Signal-to-noise ratio | SNR | 0 dB |
| Type | ISDRJ | ISPRJ | ISCRJ | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| SNR | −10 dB | −5 dB | 0 dB | −10 dB | −5 dB | 0 dB | −10 dB | −5 dB | 0 dB | ||
| Method | |||||||||||
| Intrapulse slope agile signal joint fractional filtering (ISASFF) | 30 | 35 | 37.5 | 27.5 | 30 | 32.5 | 27.5 | 30 | 30 | ||
| Energy function detection and band-pass filtering (EFDBF) | 25 | 27.5 | 27.5 | 22.5 | 22.5 | 22.5 | 25 | 25 | 27.5 | ||
| Frequency-coded signal joint fractional filtering (FCSFF) | 27.5 | 27.5 | 27.5 | 27.5 | 27.5 | 27.5 | 27.5 | 30 | 30 | ||
| The proposed method | 50 | 50 | 50 | 50 | 50 | 50 | 50 | 50 | 50 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Li, B.; Chen, H.; Liu, W.; Zhu, Y.; Luo, J.; Ni, L. Interrupted-Sampling Repeater Jamming Countermeasure Based on Intrapulse Frequency–Coded Joint Frequency Modulation Slope Agile Waveform. Remote Sens. 2024, 16, 2810. https://doi.org/10.3390/rs16152810
Wang X, Li B, Chen H, Liu W, Zhu Y, Luo J, Ni L. Interrupted-Sampling Repeater Jamming Countermeasure Based on Intrapulse Frequency–Coded Joint Frequency Modulation Slope Agile Waveform. Remote Sensing. 2024; 16(15):2810. https://doi.org/10.3390/rs16152810
Chicago/Turabian StyleWang, Xiaoge, Binbin Li, Hui Chen, Weijian Liu, Yongzhe Zhu, Jun Luo, and Liuliu Ni. 2024. "Interrupted-Sampling Repeater Jamming Countermeasure Based on Intrapulse Frequency–Coded Joint Frequency Modulation Slope Agile Waveform" Remote Sensing 16, no. 15: 2810. https://doi.org/10.3390/rs16152810