
Multi-Target Pairing Method Based on PM-ESPRIT-like DOA Estimation for T/R-R HFSWR


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
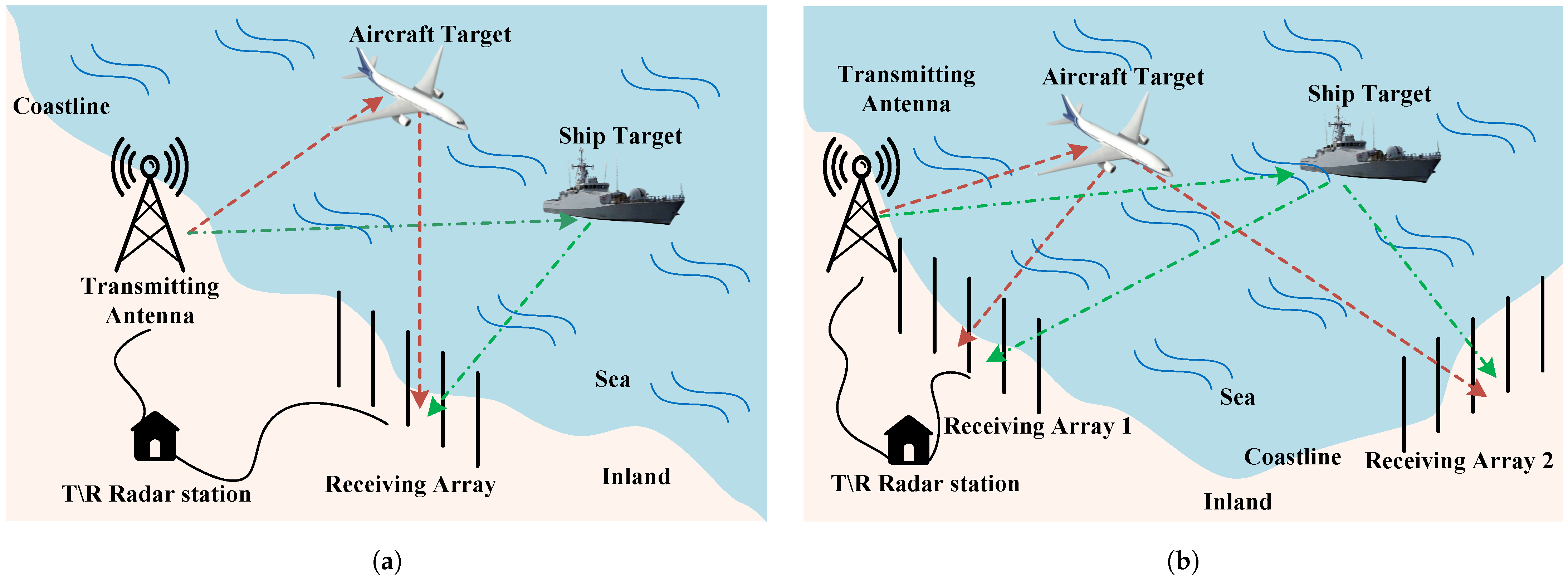
1. Introduction
- (1)
- The proposed method belongs to the class of DOA estimation algorithms and relies solely on angle information for multi-target pairing.
- (2)
- Unlike track association methods, the proposed method eliminates the need for multiframe association operations and complex mathematical computations. Moreover, the proposed method does not require iterative operations or spectral peak searching, making it computationally efficient.
- (3)
- If the two subarrays are considered as a single non-uniform linear array for angle estimation and multi-target pairing, the long baseline can lead to grating lobes and angle ambiguity. The proposed method can avoid these issues.
- (4)
- By employing the generalized virtual array aperture extension, we construct a large generalized received data matrix, which enables the proposed method to maintain robust angle estimation and multi-target pairing performance under small angular interval target conditions.
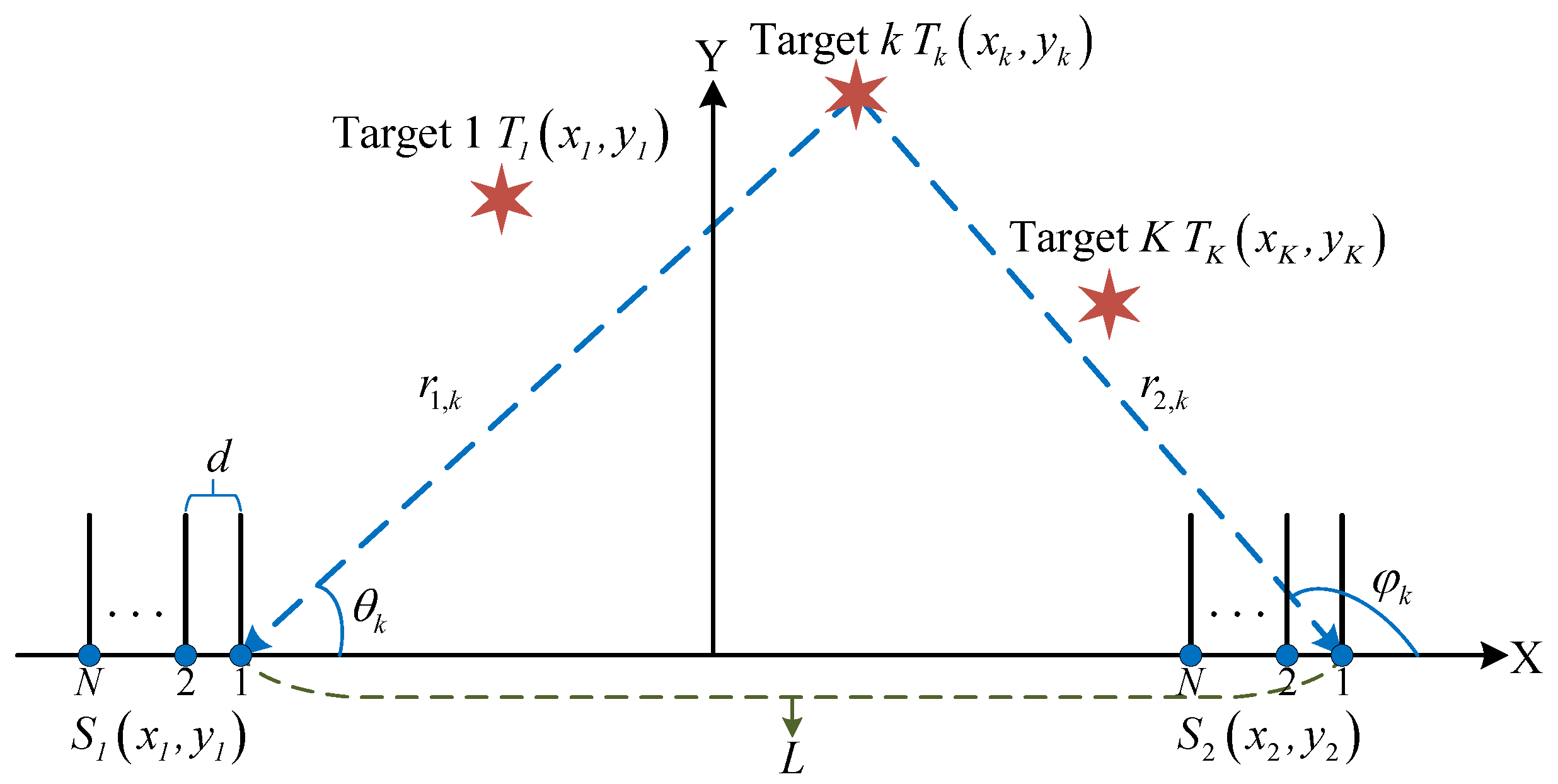
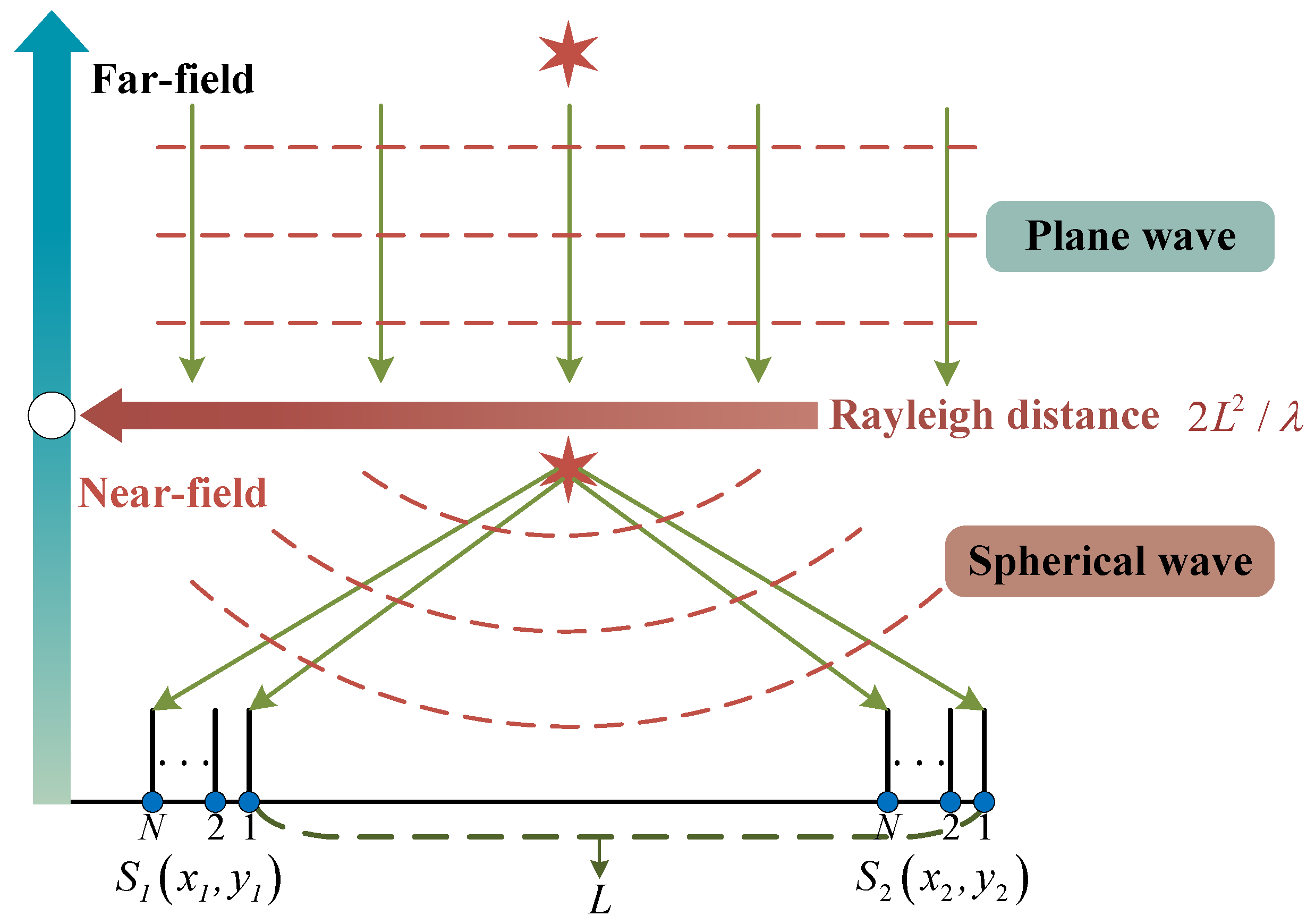
2. Signal Model
- (1)
- The K targets are mutually uncorrelated, and the number of targets is less than the number of sensors in the subarray, i.e., .
- (2)
- The additive noises and on the two subarrays are both zero-mean, Gaussian white noises with a variance of in time and space. The noises are statistically independent from each other, i.e., , and their covariance matrix is as follows: , .
- (3)
- To facilitate theoretical performance analysis, the incident signal at the -subarray is modeled as the zero-mean, temporally complex Gaussian random process, and the associated variance is determined by and for .
- (4)
- The incident signals and are statistically independent from the additive noise and at the two subarrays.
3. Proposed Method
3.1. Construction of Cross-Correlation Matrix Based on Long Baseline Array Signals
3.2. Generalized Virtual Array Aperture Extension Technique
3.3. Multi-Target Pairing with DOA Estimation
3.4. Complexity Analysis
4. Simulation Results
4.1. Simulation Parameter Settings
4.2. Simulation Results and Analysis
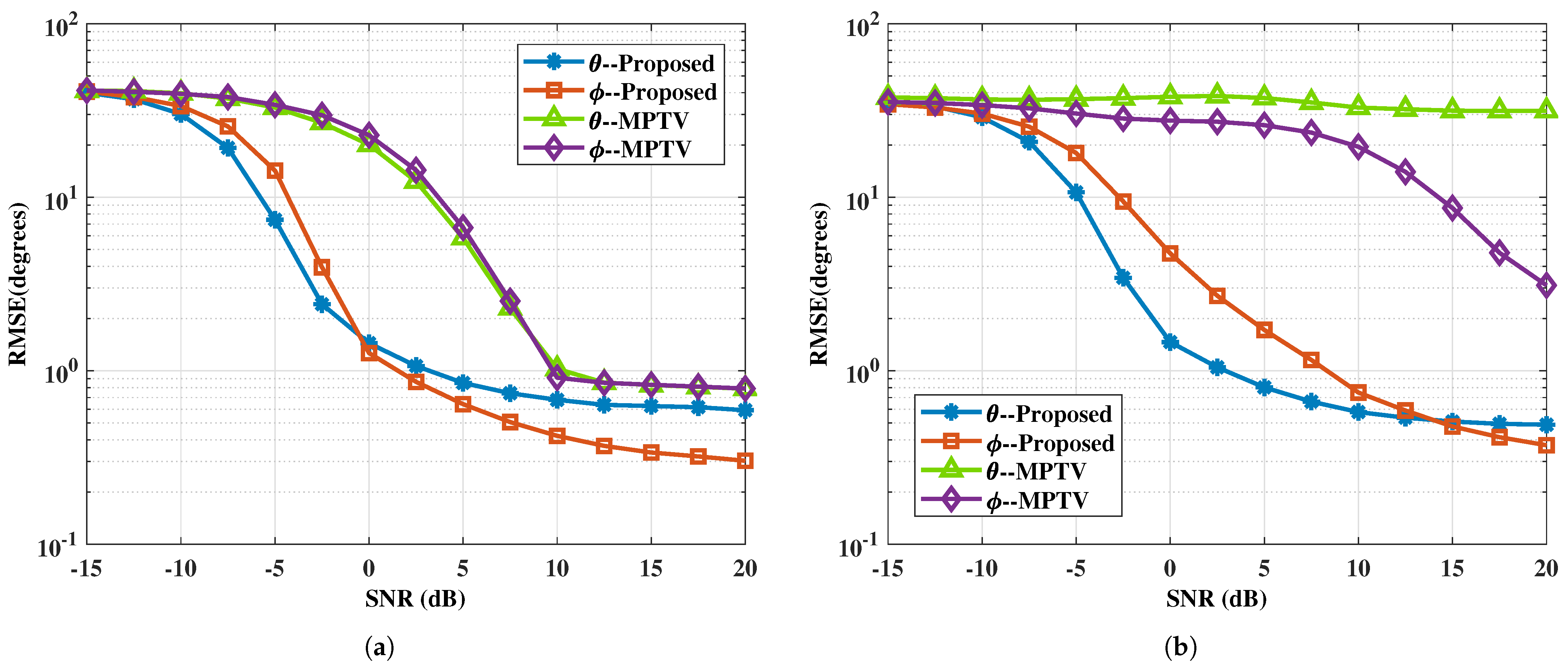
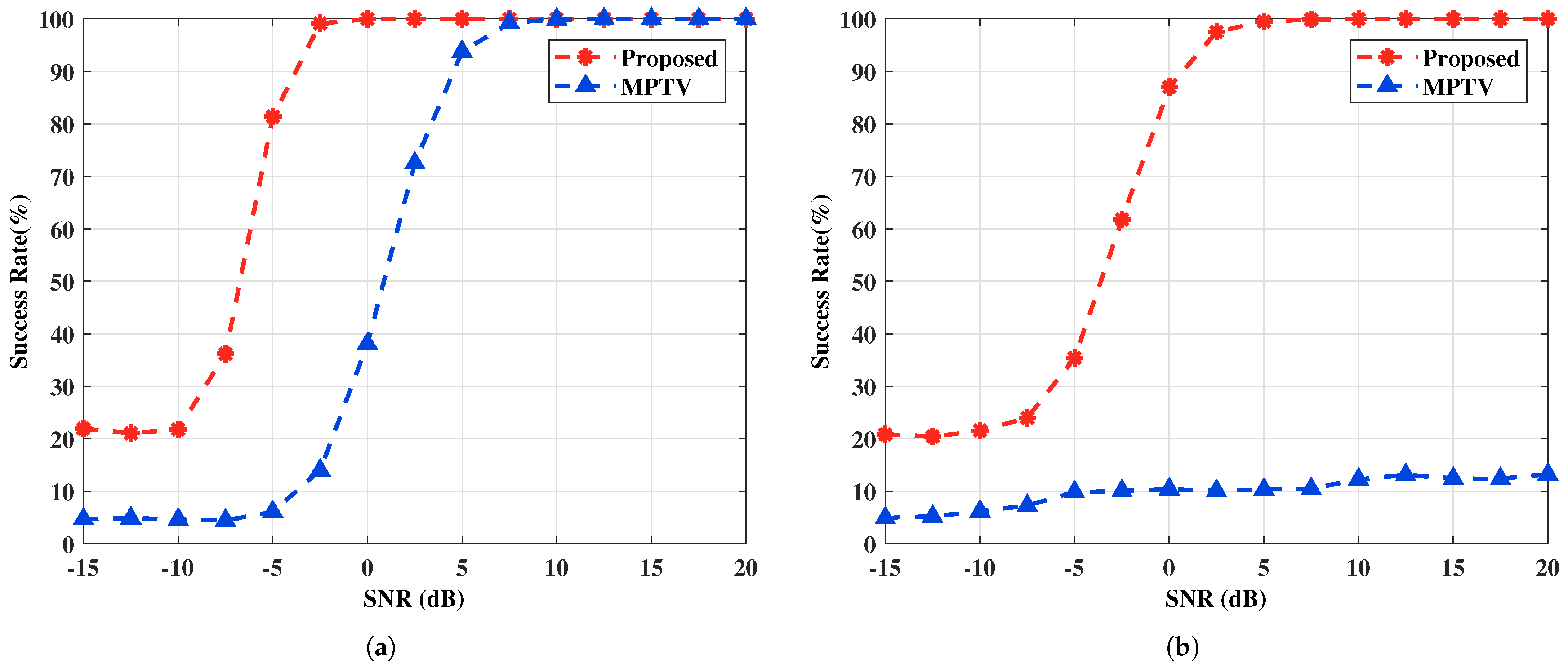
4.2.1. Performance vs. SNR: Example 1
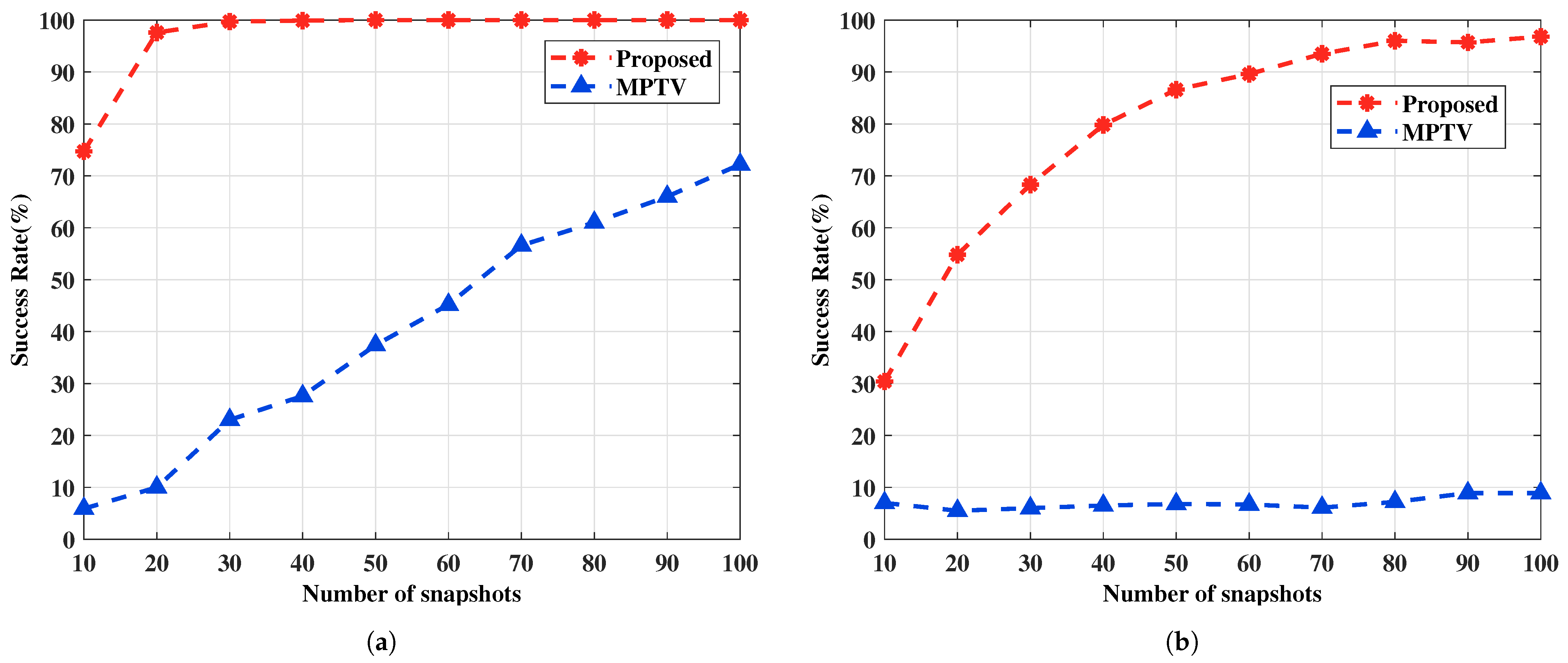
4.2.2. Performance vs. Number of Snapshots: Example 2
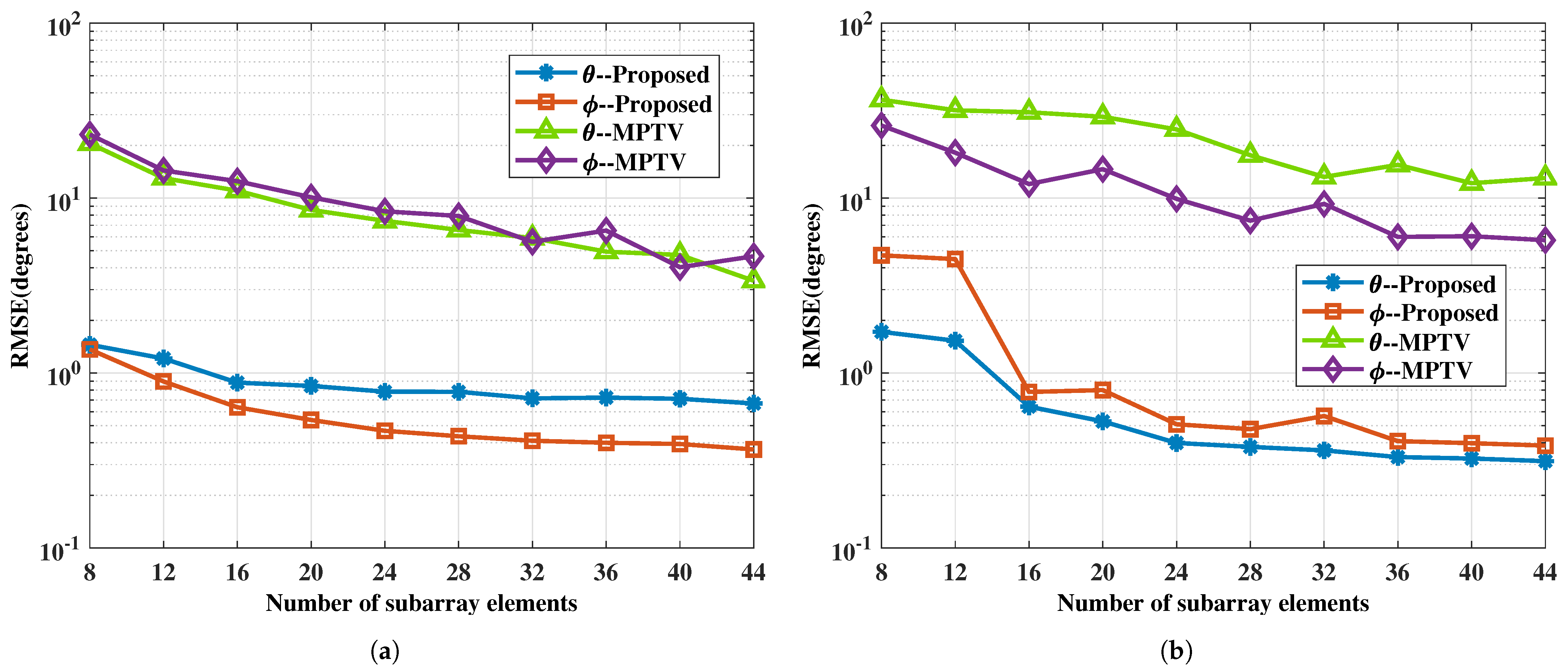
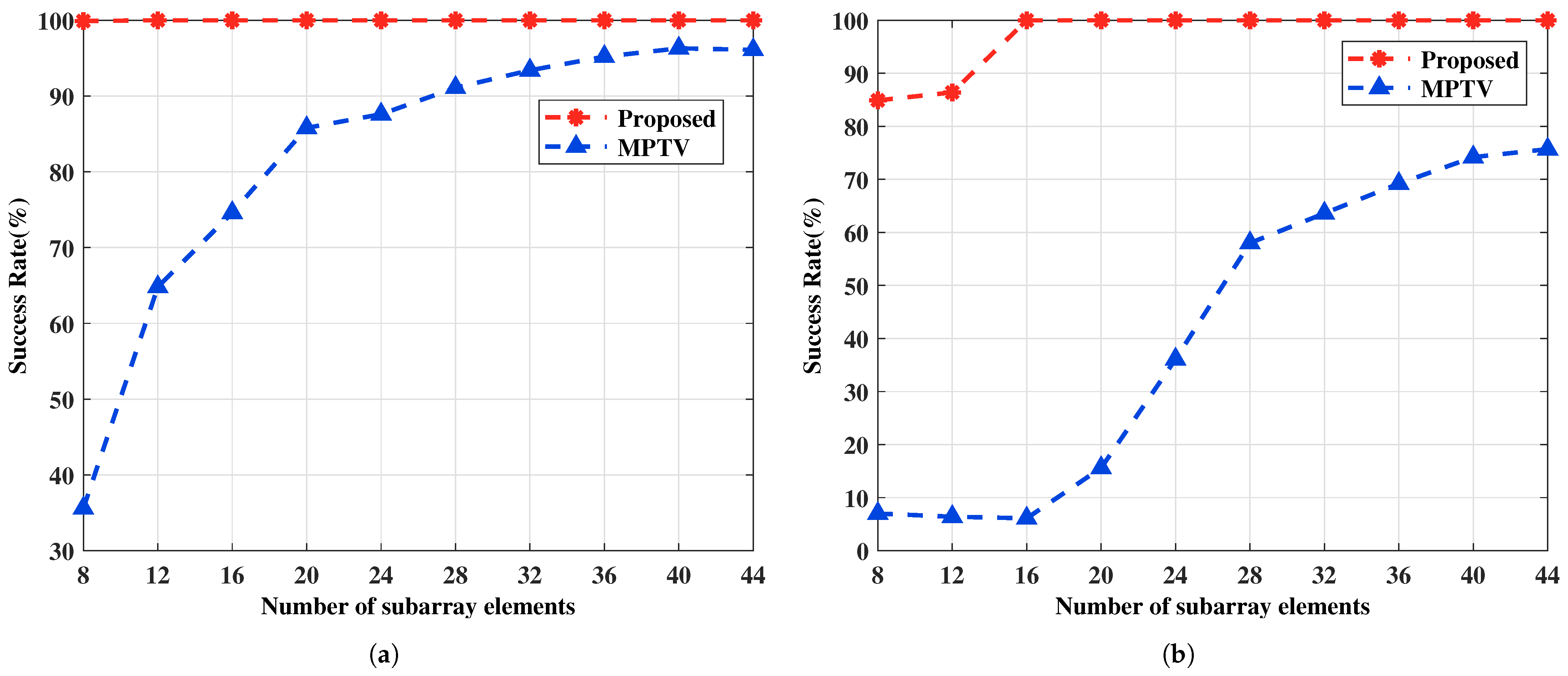
4.2.3. Performance vs. Number of Subarray Elements: Example 3
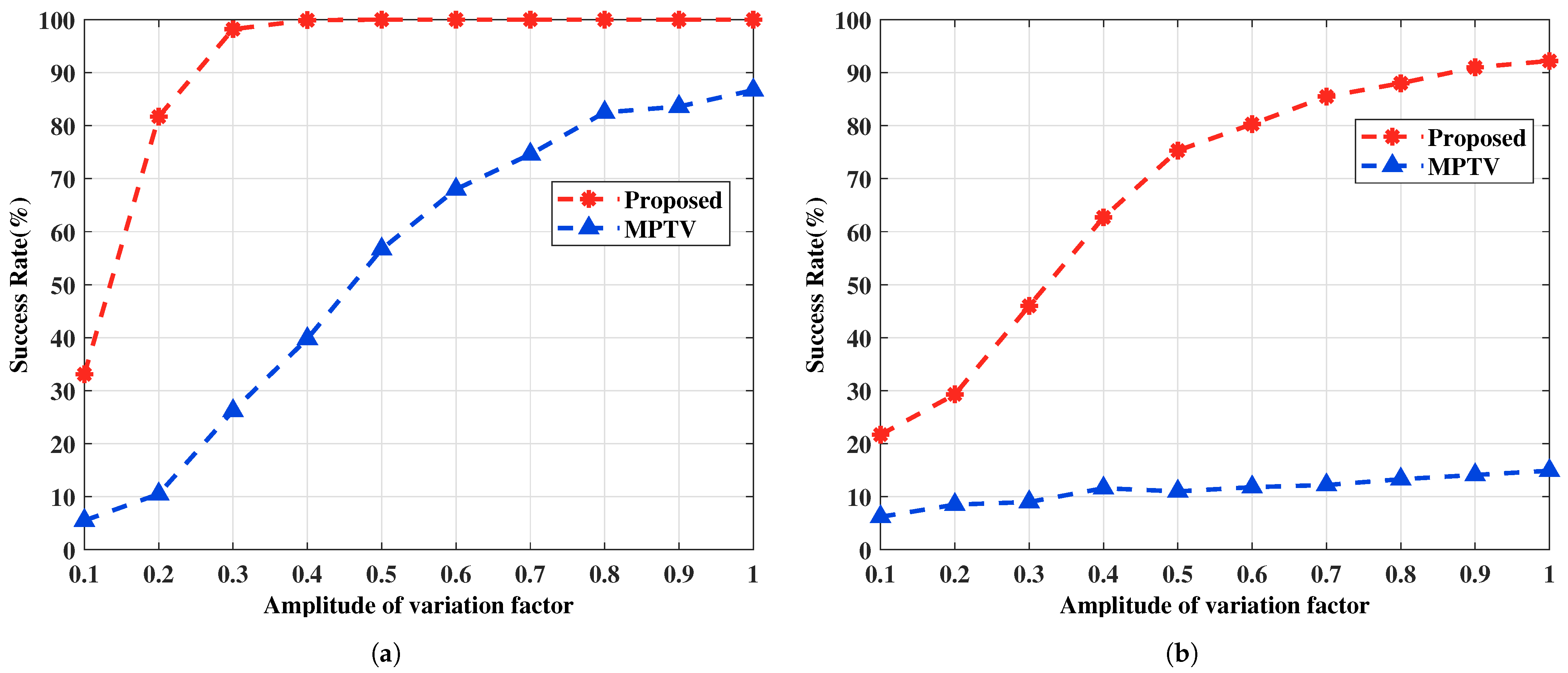
4.2.4. Performance vs. Amplitude and Phase Variation Factor: Example 4
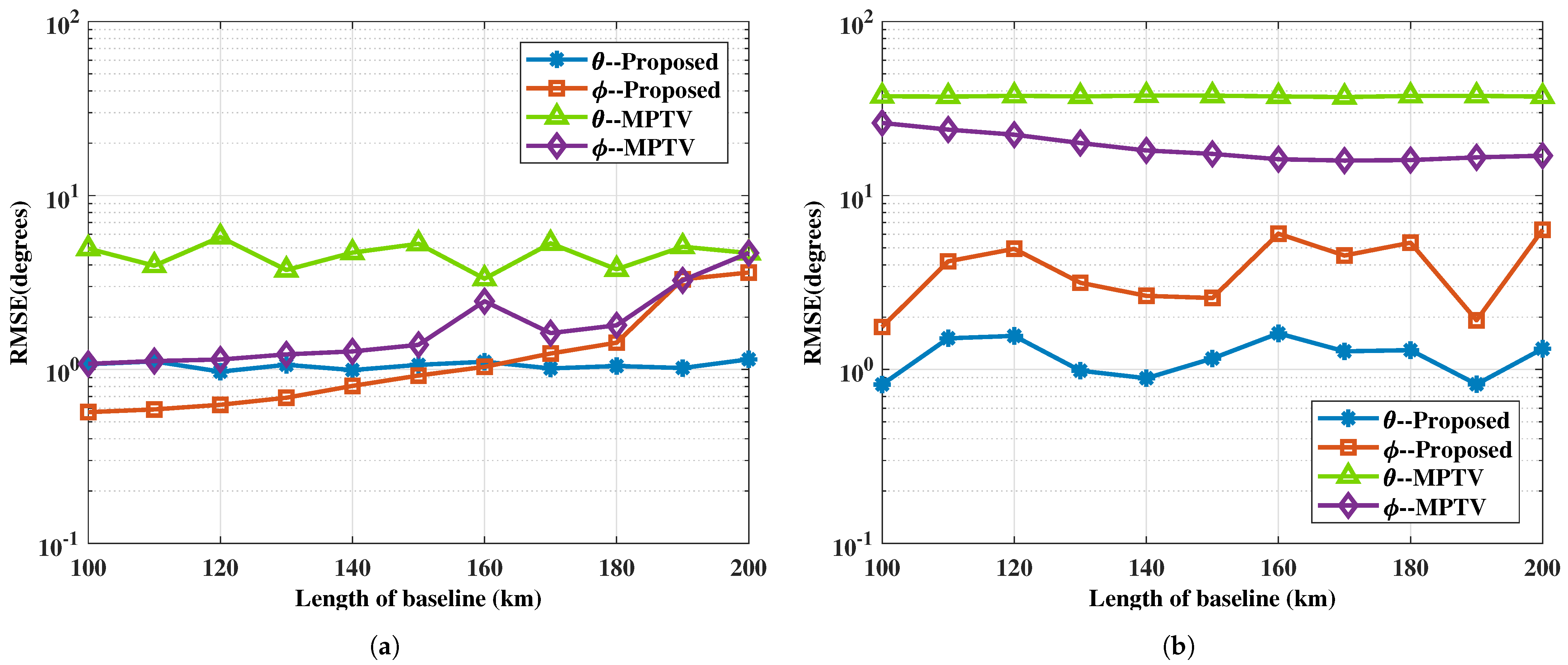
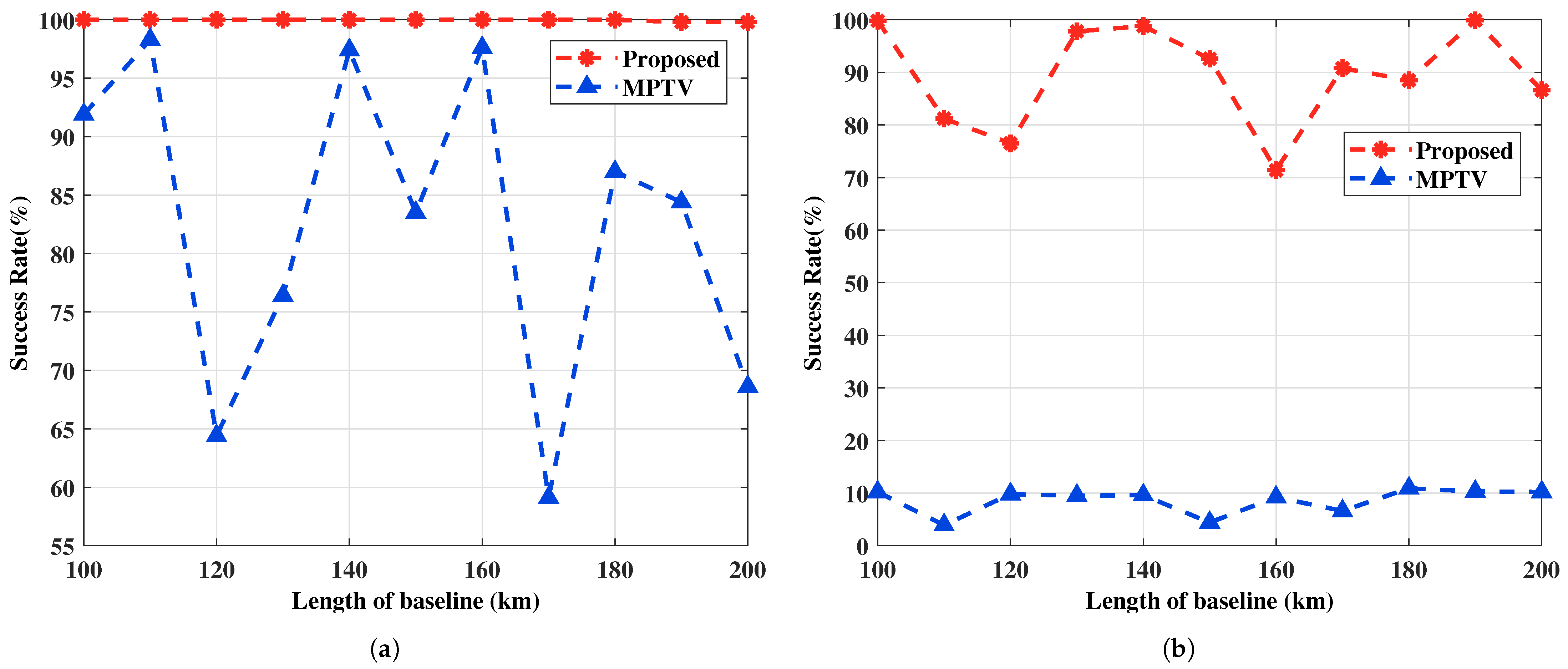
4.2.5. Performance vs. Length of Baseline: Example 5
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, J.; Yang, Q.; Zhang, X.; Ji, X.; Xiao, D. Space-Time Adaptive Processing Clutter-Suppression Algorithm Based on Beam Reshaping for High-Frequency Surface Wave Radar. Remote Sens. 2022, 14, 2935. [Google Scholar] [CrossRef]
- Ji, Y.; Cheng, X.; Wang, Y.; Sun, W.; Zhang, X.; Jiang, M.; Ren, J.; Li, F. Motion compensation method using direct wave signal for CTSR bistatic HFSWR. IEEE Geosci. Remote Sens. Lett. 2023, 20, 1–5. [Google Scholar] [CrossRef]
- Li, Y.; Wang, Z.; Zhang, W.; Lu, Z.; Xu, L.; Wang, Z. Joint correction method for ionospheric phase pollution of high-frequency sky-surface wave radar based on adaptive optimal path. IET Radar Sonar Navig. 2023, 17, 701–718. [Google Scholar] [CrossRef]
- Yang, Z.; Lai, Y.; Zhou, H.; Tian, Y.; Qin, Y.; Lv, Z. Improving Ship Detection Based on Decision Tree Classification for High Frequency Surface Wave Radar. J. Mar. Sci. Eng. 2023, 11, 493. [Google Scholar] [CrossRef]
- Sun, H. Conceptual study on bistatic shipborne high frequency surface wave radar. IEEE Aerosp. Electron. Syst. Mag. 2018, 33, 4–13. [Google Scholar] [CrossRef]
- Wyatt, L.R.; Green, J.J.; Middleditch, A.; Moorhead, M.D.; Howarth, J.; Holt, M.; Keogh, S. Operational wave, current, and wind measurements with the Pisces HF radar. IEEE J. Ocean. Eng. 2006, 31, 819–834. [Google Scholar] [CrossRef]
- Moo, P.; Ponsford, T.; DiFilippo, D.; McKerracher, R.; Kashyap, N.; Allard, Y. Canada’s Third Generation High Frequency Surface Wave Radar System. J. Ocean Technol. 2015, 10, 21. [Google Scholar]
- Helzel, T.; Hansen, B.; Kniephoff, M.; Petersen, L.; Valentin, M. Introduction of the compact HF radar WERA-S. In Proceedings of the 2012 IEEE/OES Baltic International Symposium (BALTIC), Klaipeda, Lithuania, 8–10 May 2012; pp. 1–3. [Google Scholar]
- Chuang, L.Z.; Chung, Y.J.; Tang, S. A simple ship echo identification procedure with SeaSonde HF radar. IEEE Geosci. Remote Sens. Lett. 2015, 12, 2491–2495. [Google Scholar] [CrossRef]
- Sun, W.; Pang, Z.; Huang, W.; Ma, P.; Ji, Y.; Dai, Y.; Li, X. A multi-stage vessel tracklet association method for compact high-frequency surface wave radar. Remote Sens. 2022, 14, 1601. [Google Scholar] [CrossRef]
- di Bisceglie, M.; Galdi, C. Ocean Remote Sensing Technologies: High frequency, marine and GNSS-based radar. In Ocean Remote Sensing Technologies: High Frequency, Marine and GNSS-Based Radar; IET The Institution of Engineering and Technology: Cambridge, UK, 2021. [Google Scholar]
- Huang, W.; Gill, E.; Wu, X.; Li, L. Measurement of sea surface wind direction using bistatic high-frequency radar. IEEE Trans. Geosci. Remote Sens. 2012, 50, 4117–4122. [Google Scholar] [CrossRef]
- Ji, Y.; Zhang, J.; Wang, Y.; Yue, C.; Gong, W.; Liu, J.; Sun, H.; Yu, C.; Li, M. Coast–ship bistatic HF surface wave radar: Simulation analysis and experimental verification. Remote Sens. 2020, 12, 470. [Google Scholar] [CrossRef]
- Ji, Y.; Zhang, J.; Wang, Y.; Meng, J.; Yu, C.; Li, M.; Sun, W. Vessel target monitoring with bistatic compact HF surface wave radar. In Proceedings of the IGARSS 2020–2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 17 February 2021; pp. 296–299. [Google Scholar]
- Adve, R.S.; Applebaum, L.; Wicks, M.C.; Schneible, R.A. Space-time-waveform adaptive processing for frequency diverse distributed radar apertures. In Proceedings of the 2006 40th Annual Conference on Information Sciences and Systems, Princeton, NJ, USA, 22–24 March 2006; pp. 1413–1417. [Google Scholar]
- Park, S.; Cho, C.J.; Lee, Y.; Da Costa, A.; Lee, S.; Ko, H. Coastal ship monitoring based on multiple compact high frequency surface wave radars. In Proceedings of the 2017 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI), Daegu, Republic of Korea, 16–18 November 2017; pp. 565–569. [Google Scholar]
- Lee, E.H.; Song, T.L. Multi-sensor track-to-track fusion with target existence in cluttered environments. IET Radar Sonar Navig. 2017, 11, 1108–1115. [Google Scholar] [CrossRef]
- Zhao, K.; Yu, C.; Zhou, G.; Quan, T. Simultaneous Target Flying Mode Identification and Altitude Estimation in Bistatic T/R-R HFSWR. Asian J. Control 2016, 18, 1062–1074. [Google Scholar] [CrossRef]
- Silva, M.T.; Shahidi, R.; Gill, E.W.; Huang, W. Nonlinear extraction of directional ocean wave spectrum from synthetic bistatic high-frequency surface wave radar data. IEEE J. Ocean. Eng. 2019, 45, 1004–1021. [Google Scholar] [CrossRef]
- Ai, X.; Huang, Y.; Zhao, F.; Yang, J.; Li, Y.; Xiao, S. Imaging of spinning targets via narrow-band T/RR bistatic radars. IEEE Geosci. Remote Sens. Lett. 2012, 10, 362–366. [Google Scholar]
- Sun, W.; Ji, M.; Huang, W.; Ji, Y.; Dai, Y. Vessel tracking using bistatic compact HFSWR. Remote Sens. 2020, 12, 1266. [Google Scholar] [CrossRef]
- Sun, W.; Pang, Z.; Huang, W.; Ji, Y.; Dai, Y. Vessel velocity estimation and tracking from Doppler echoes of T/RR composite compact HFSWR. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 4427–4440. [Google Scholar] [CrossRef]
- Xu, B.; Zhao, Y. Transmit beamspace-based DOD and DOA estimation method for bistatic MIMO radar. Signal Process. 2019, 157, 88–96. [Google Scholar] [CrossRef]
- Xu, B.; Zhao, Y. Joint transmit-receive B-PARAFAC method for angle estimation in bistatic MIMO radar. Digit. Signal Process. 2019, 92, 54–61. [Google Scholar] [CrossRef]
- Dang, X.; Chen, B.; Yang, M.; Zheng, G. Beamspace unitary ESPRIT algorithm for angle estimation in bistatic MIMO radar. Int. J. Antennas Propag. 2015, 2015, 621358. [Google Scholar]
- Hoffmann, R.; Neuberger, N.; Vehmas, R. Rx beamforming for long baseline multistatic radar networks. In Proceedings of the 2021 IEEE Radar Conference (RadarConf21), Atlanta, GA, USA, 7–14 May 2021; pp. 1–6. [Google Scholar]
- Zhou, E.; Jiang, H.; Qi, H. 4-D parameter estimation in bistatic MIMO radar for near-field target localization. In Proceedings of the 2015 IEEE International Wireless Symposium (IWS 2015), Shenzhen, China, 30 March–1 April 2015; pp. 1–4. [Google Scholar]
- Wang, S.; Feng, J.; Wang, F.; Zhang, J.; Liang, X. Research on location accuracy in bistatic radar network. In Proceedings of the 2011 IEEE 2nd International Conference on Computing, Control and Industrial Engineering, Wuhan, China, 20–21 August 2011; Volume 1, pp. 98–101. [Google Scholar]
- Sun, W.; Li, X.; Pang, Z.; Ji, Y.; Dai, Y.; Huang, W. Track-to-Track association based on maximum likelihood estimation for T/RR composite compact HFSWR. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–12. [Google Scholar]
- Xu, Z.; Fang, L. An improved track association algorithm based on AdaBoost and decision tree. In Proceedings of the 2021 4th International Conference on Advanced Electronic Materials, Computers and Software Engineering (AEMCSE), Changsha, China, 26–28 March 2021; pp. 794–800. [Google Scholar]
- Chen, T.; Yang, P.; Peng, H.; Qian, Z. Multi-target tracking algorithm based on PHD filter against multi-range-false-target jamming. J. Syst. Eng. Electron. 2020, 31, 859–870. [Google Scholar] [CrossRef]
- Tang, H.; Zhao, Y.; Wang, Y. The multi-target association algorithm based on multi-feature. In Proceedings of the 2018 IEEE International Conference on Computational Electromagnetics (ICCEM), Chengdu, China, 26–28 March 2018; pp. 1–3. [Google Scholar]
- Hao, L. A possibilistic data association based algorithm for multi-target tracking. In Proceedings of the 2013 Third International Conference on Intelligent System Design and Engineering Applications, Hong Kong, China, 16–18 January 2013; pp. 158–162. [Google Scholar]
- Bai, Y.; Wu, X.; Deng, W.; Zhang, X. Multi-target pair-matching method based on angle information in transmit/receive-receive synergetic High Frequency Surface Wave Radar. IET Radar Sonar Navig. 2022, 16, 1188–1197. [Google Scholar] [CrossRef]
- Wu, R.; Zhang, Z. Convex optimization-based 2-D DOA estimation with enhanced virtual aperture and virtual snapshots extension for l-shaped array. IEEE Trans. Veh. Technol. 2020, 69, 6473–6484. [Google Scholar] [CrossRef]
- Dong, Y.Y.; Dong, C.x.; Xu, J.; Zhao, G.q. Computationally efficient 2-D DOA estimation for L-shaped array with automatic pairing. IEEE Antennas Wirel. Propag. Lett. 2016, 15, 1669–1672. [Google Scholar] [CrossRef]
- Nie, X.; Li, L. A computationally efficient subspace algorithm for 2-D DOA estimation with L-shaped array. IEEE Signal Process. Lett. 2014, 21, 971–974. [Google Scholar]
- Wang, G.; Xin, J.; Wang, J.; Zheng, N.; Sano, A. Subspace-based two-dimensional direction estimation and tracking of multiple targets. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 1386–1402. [Google Scholar] [CrossRef]
- Cui, M.; Dai, L. Channel estimation for extremely large-scale MIMO: Far-field or near-field? IEEE Trans. Commun. 2022, 70, 2663–2677. [Google Scholar] [CrossRef]
- Mailloux, R.J. Phased Array Antenna Handbook; Artech House: Norwood, MA, USA, 2017. [Google Scholar]
- Ryan, J.G.; Goubran, R.A. Array optimization applied in the near field of a microphone array. IEEE Trans. Speech Audio Process. 2000, 8, 173–176. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, S.; Wu, X.; Chen, S.; Deng, W.; Zhang, X. Multi-Target Pairing Method Based on PM-ESPRIT-like DOA Estimation for T/R-R HFSWR. Remote Sens. 2024, 16, 3128. https://doi.org/10.3390/rs16173128
Li S, Wu X, Chen S, Deng W, Zhang X. Multi-Target Pairing Method Based on PM-ESPRIT-like DOA Estimation for T/R-R HFSWR. Remote Sensing. 2024; 16(17):3128. https://doi.org/10.3390/rs16173128
Chicago/Turabian StyleLi, Shujie, Xiaochuan Wu, Siming Chen, Weibo Deng, and Xin Zhang. 2024. "Multi-Target Pairing Method Based on PM-ESPRIT-like DOA Estimation for T/R-R HFSWR" Remote Sensing 16, no. 17: 3128. https://doi.org/10.3390/rs16173128
APA StyleLi, S., Wu, X., Chen, S., Deng, W., & Zhang, X. (2024). Multi-Target Pairing Method Based on PM-ESPRIT-like DOA Estimation for T/R-R HFSWR. Remote Sensing, 16(17), 3128. https://doi.org/10.3390/rs16173128