

Comparative Study of Seafloor Topography Prediction from Gravity–Geologic Method and Analytical Algorithm


Abstract
1. Introduction
2. Theories and Methods
2.1. Gravity–Geologic Method
2.2. Analytical Algorithm
3. Simulation Experiments
3.1. Simulated Data
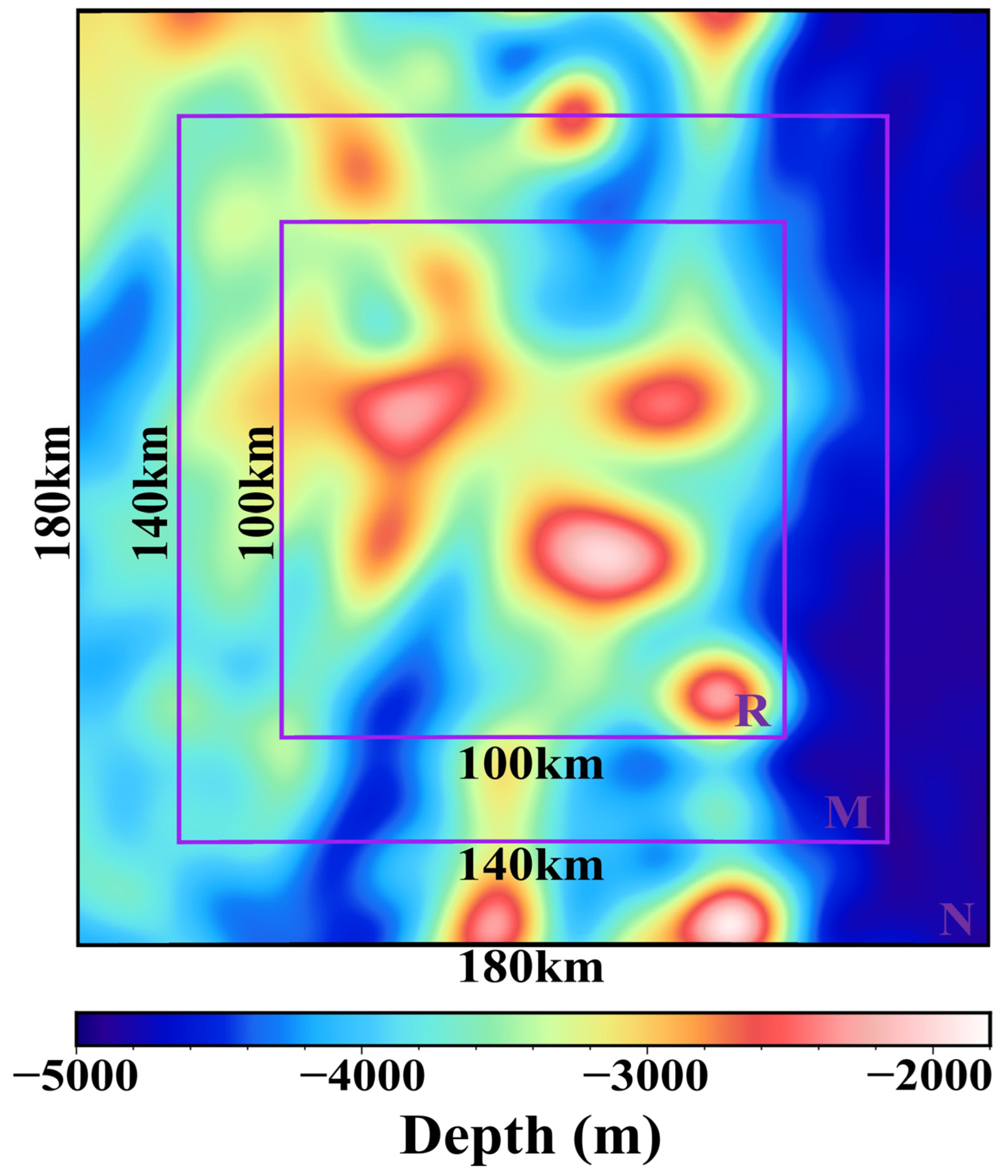
3.1.1. Simulated Seafloor Topography and Gravity Anomaly
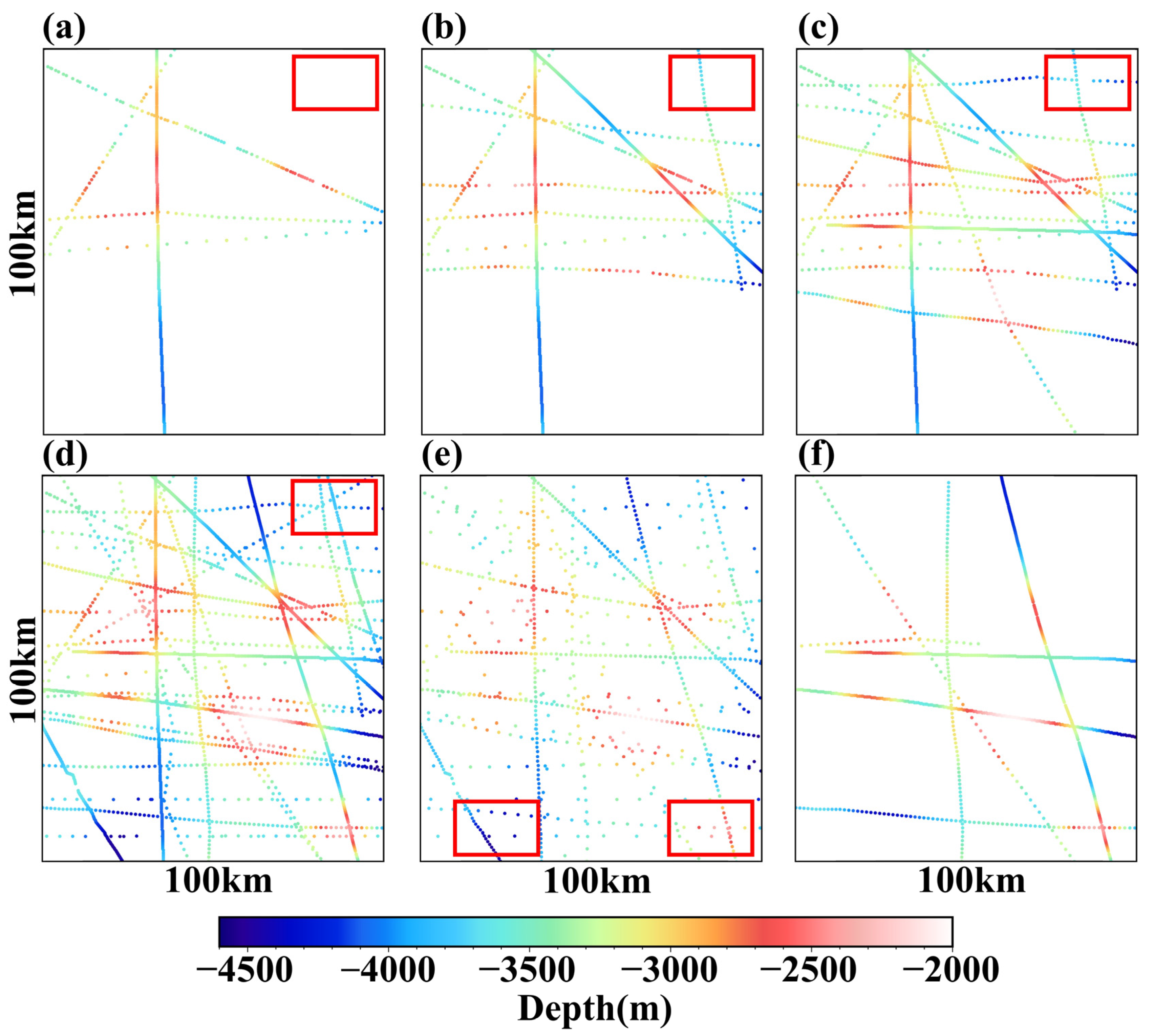
3.1.2. Simulated Ship Soundings
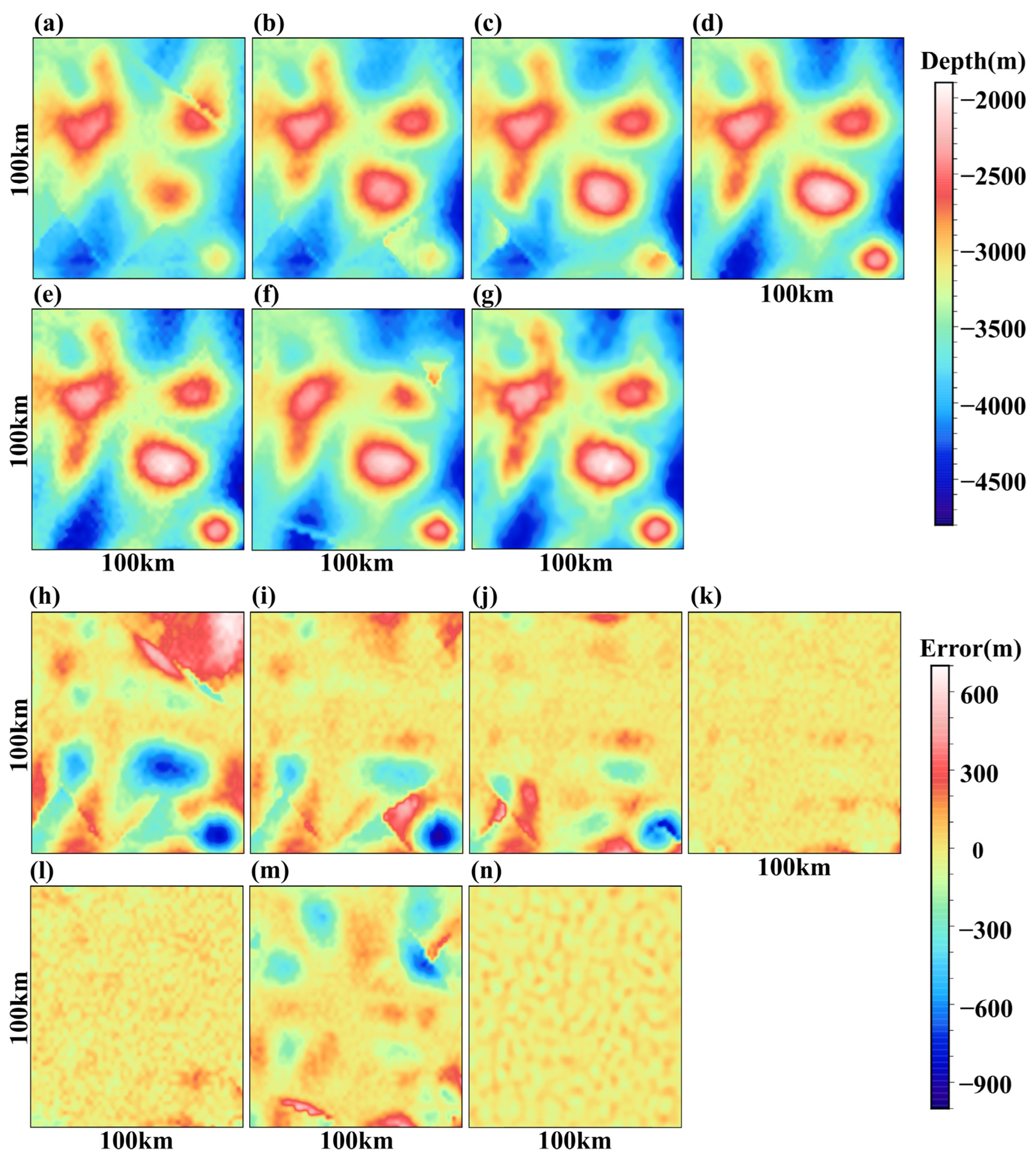
3.2. Impact of Ship Soundings on the GGM
3.3. Stability of Two Algorithms
4. Realistic Examples
4.1. Gravity Anomaly and Ship Soundings
4.2. Analysis of Realistic Case Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Weatherall, P.; Marks, K.M.; Jakobsson, M.; Schmitt, T.; Tani, S.; Arndt, J.E.; Rovere, M.; Chayes, D.; Ferrini, V.; Wigley, R. A New Digital Bathymetric Model of the World’s Oceans. Earth Space Sci. 2015, 2, 331–345. [Google Scholar] [CrossRef]
- Sandwell, D.T.; Smith, W.H.F.; Gille, S.; Kappel, E.; Jayne, S.; Soofi, K.; Coakley, B.; Géli, L. Bathymetry from Space: Rationale and Requirements for a New, High-Resolution Altimetric Mission. Comptes Rendus. Géosci. 2006, 338, 1049–1062. [Google Scholar] [CrossRef]
- Hsiao, Y.-S.; Kim, J.W.; Kim, K.B.; Lee, B.Y.; Hwang, C. Bathymetry Estimation Using the Gravity–Geologic Method: An Investigation of Density Contrast Predicted by the Downward Continuation Method. Terr. Atmos. Ocean. Sci. 2011, 22, 347. [Google Scholar] [CrossRef]
- Hsiao, Y.-S.; Hwang, C.; Cheng, Y.-S.; Chen, L.-C.; Hsu, H.-J.; Tsai, J.-H.; Liu, C.-L.; Wang, C.-C.; Liu, Y.-C.; Kao, Y.-C. High-Resolution Depth and Coastline over Major Atolls of South China Sea from Satellite Altimetry and Imagery. Remote Sens. Environ. 2016, 176, 69–83. [Google Scholar] [CrossRef]
- Hwang, C. A Bathymetric Model for the South China Sea from Satellite Altimetry and Depth Data. Mar. Geod. 1999, 22, 37–51. [Google Scholar] [CrossRef]
- Ibrahim, A.; Hinze, W.J. Mapping Buried Bedrock Topography with Gravity. Groundwater 1972, 10, 18–23. [Google Scholar] [CrossRef]
- Kim, J.W.; Von Frese, R.R.B.; Lee, B.Y.; Roman, D.R.; Doh, S.-J. Altimetry-Derived Gravity Predictions of Bathymetry by the Gravity-Geologic Method. Pure Appl. Geophys. 2011, 168, 815–826. [Google Scholar] [CrossRef]
- Kim, K.B.; Yun, H.S. Satellite-Derived Bathymetry Prediction in Shallow Waters Using the Gravity-Geologic Method: A Case Study in the West Sea of Korea. KSCE J. Civ. Eng. 2018, 22, 2560–2568. [Google Scholar] [CrossRef]
- Ouyang, M.-D.; Sun, Z.-M.; Zhai, Z.-H. Predicting bathymetry in South China Sea using the gravity–geologic method. Chin. J. Geophys. 2014, 57, 2756–2765. [Google Scholar]
- Wan, X.; Han, W.; Ran, J.; Ma, W.; Annan, R.F.; Li, B. Seafloor Density Contrast Derived From Gravity and Shipborne Depth Observations: A Case Study in a Local Area of Atlantic Ocean. Front. Earth Sci. 2021, 9, 668863. [Google Scholar] [CrossRef]
- Wei, Z.; Guo, J.; Zhu, C.; Yuan, J.; Chang, X.; Ji, B. Evaluating Accuracy of HY-2A/GM-Derived Gravity Data With the Gravity-Geologic Method to Predict Bathymetry. Front. Earth Sci. 2021, 9, 636246. [Google Scholar] [CrossRef]
- Xiang, X.; Wan, X.; Zhang, R.; Li, Y.; Sui, X.; Wang, W. Bathymetry Inversion with the Gravity-Geologic Method: A Study of Long-Wavelength Gravity Modeling Based on Adaptive Mesh. Mar. Geod. 2017, 40, 329–340. [Google Scholar] [CrossRef]
- An, D.; Guo, J.; Chang, X.; Wang, Z.; Jia, Y.; Liu, X.; Bondur, V.; Sun, H. High-Precision 1′ × 1′ Bathymetric Model of Philippine Sea Inversed from Marine Gravity Anomalies. Geosci. Model Dev. 2024, 17, 2039–2052. [Google Scholar] [CrossRef]
- An, D.; Guo, J.; Li, Z.; Ji, B.; Liu, X.; Chang, X. Improved Gravity-Geologic Method Reliably Removing the Long-Wavelength Gravity Effect of Regional Seafloor Topography: A Case of Bathymetric Prediction in the South China Sea. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–12. [Google Scholar] [CrossRef]
- Dixon, T.H.; Naraghi, M.; McNutt, M.K.; Smith, S.M. Bathymetric Prediction from SEASAT Altimeter Data. J. Geophys. Res. 1983, 88, 1563–1571. [Google Scholar] [CrossRef]
- Parker, R.L. The Rapid Calculation of Potential Anomalies. Geophys. J. Int. 1973, 31, 447–455. [Google Scholar] [CrossRef]
- Ramillien, G.; Cazenave, A. Global Bathymetry Derived from Altimeter Data of the ERS-1 Geodetic Mission. J. Geodyn. 1997, 23, 129–149. [Google Scholar] [CrossRef]
- Sandwell, D.T.; Smith, W.H.F. Marine Gravity Anomaly from Geosat and ERS 1 Satellite Altimetry. J. Geophys. Res. 1997, 102, 10039–10054. [Google Scholar] [CrossRef]
- Smith, W.H.F.; Sandwell, D.T. Bathymetric Prediction from Dense Satellite Altimetry and Sparse Shipboard Bathymetry. J. Geophys. Res. 1994, 99, 21803–21824. [Google Scholar] [CrossRef]
- Smith, W.H.F.; Sandwell, D.T. Global Sea Floor Topography from Satellite Altimetry and Ship Depth Soundings. Science 1997, 277, 1956–1962. [Google Scholar] [CrossRef]
- Minzhang, H.; Jiancheng, L.; Hui, L.; Lelin, X. Bathymetry Predicted from Vertical Gravity Gradient Anomalies and Ship Soundings. Geod. Geodyn. 2014, 5, 41–46. [Google Scholar] [CrossRef]
- Sandwell, D.T.; Goff, J.A.; Gevorgian, J.; Harper, H.; Kim, S.; Yu, Y.; Tozer, B.; Wessel, P.; Smith, W.H.F. Improved Bathymetric Prediction Using Geological Information: SYNBATH. Earth Space Sci. 2022, 9, e2021EA002069. [Google Scholar] [CrossRef]
- Wang, Y.M. Predicting Bathymetry from the Earth’s Gravity Gradient Anomalies. Mar. Geod. 2000, 23, 251–258. [Google Scholar] [CrossRef]
- Xu, N.; Ma, X.; Ma, Y.; Zhao, P.; Yang, J.; Wang, X.H. Deriving Highly Accurate Shallow Water Bathymetry From Sentinel-2 and ICESat-2 Datasets by a Multitemporal Stacking Method. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 6677–6685. [Google Scholar] [CrossRef]
- Hamlington, B.D.; Willis, J.K.; Vinogradova, N. The Emerging Golden Age of Satellite Altimetry to Prepare Humanity for Rising Seas. Earth’s Future 2023, 11, e2023EF003673. [Google Scholar] [CrossRef]
- Kim, S.-S.; Wessel, P. New Analytic Solutions for Modeling Vertical Gravity Gradient Anomalies. Geochem. Geophys. Geosyst. 2016, 17, 1915–1924. [Google Scholar] [CrossRef]
- Yang, J.; Jekeli, C.; Liu, L. Seafloor Topography Estimation From Gravity Gradients Using Simulated Annealing. JGR Solid Earth 2018, 123, 6958–6975. [Google Scholar] [CrossRef]
- Xu, H.; Yu, J. Using an Iterative Algorithm to Predict Topography From Vertical Gravity Gradients and Ship Soundings. Earth Space Sci. 2022, 9, e2022EA002437. [Google Scholar] [CrossRef]
- Fan, D.; Li, S.; Feng, J.; Sun, Y.; Xu, Z.; Huang, Z. A New Global Bathymetry Model: STO_IEU2020. Remote Sens. 2022, 14, 5744. [Google Scholar] [CrossRef]
- Becker, J.J.; Sandwell, D.T.; Smith, W.H.F.; Braud, J.; Binder, B.; Depner, J.L.; Fabre, D.; Factor, J.; Ingalls, S.; Kim, S.H.; et al. Global Bathymetry and Elevation Data at 30 Arc Seconds Resolution: SRTM30_PLUS. Mar. Geod. 2009, 32, 355–371. [Google Scholar] [CrossRef]
- Jakobsson, M.; Mayer, L.A.; Bringensparr, C.; Castro, C.F.; Mohammad, R.; Johnson, P.; Ketter, T.; Accettella, D.; Amblas, D.; An, L.; et al. The International Bathymetric Chart of the Arctic Ocean Version 4.0. Sci Data 2020, 7, 176. [Google Scholar] [CrossRef]
- Tozer, B.; Sandwell, D.T.; Smith, W.H.F.; Olson, C.; Beale, J.R.; Wessel, P. Global Bathymetry and Topography at 15 Arc Sec: SRTM15+. Earth Space Sci. 2019, 6, 1847–1864. [Google Scholar] [CrossRef]
- Kim, K.B.; Hsiao, Y.-S.; Kim, J.W.; Lee, B.Y.; Kwon, Y.K.; Kim, C.H. Bathymetry Enhancement by Altimetry-Derived Gravity Anomalies in the East Sea (Sea of Japan). Mar. Geophys. Res. 2010, 31, 285–298. [Google Scholar] [CrossRef]
- Li, Q.; Bao, L. Comparative Analysis of Methods for Bathymetry Prediction from Altimeter-derived Gravity Anomalies. Hydrogr. Surv. Charting 2016, 36, 1–4+18. [Google Scholar]
- Yu, J.; Xu, H.; Wan, X. An Analytical Method to Estimate Seabed Topography Only from Vertical Gravitational Gradient. Mar. Geod. 2021, 44, 306–326. [Google Scholar] [CrossRef]
- Yu, J.; An, B.; Xu, H.; Sun, Z.; Tian, Y.; Wang, Q. An Iterative Algorithm for Predicting Seafloor Topography from Gravity Anomalies. Remote Sens. 2023, 15, 1069. [Google Scholar] [CrossRef]
- Xu, H.; Tian, Y.; Yu, J.; Anderson, O.B.; Wang, Q.; Sun, Z. Comparative Study on Predicting Topography from Gravity Anomaly and Gravity Gradient Anomaly. Remote Sens. 2024, 16, 166. [Google Scholar] [CrossRef]
- Xu, H.; Yu, J.; Zeng, Y.; Wang, Q.; Tian, Y.; Sun, Z. Predicting Bathymetry Based on Vertical Gravity Gradient Anomaly and Analyses for Various Influential Factors. Geod. Geodyn. 2024, 15, 386–396. [Google Scholar] [CrossRef]
- Nagy, D.; Papp, G.; Benedek, J. The Gravitational Potential and Its Derivatives for the Prism. J. Geod. 2000, 74, 552–560. [Google Scholar] [CrossRef]
- Wan, X.; Annan, R.F.; Ziggah, Y.Y. Altimetry-Derived Gravity Gradients Using Spectral Method and Their Performance in Bathymetry Inversion Using Back-Propagation Neural Network. JGR Solid Earth 2023, 128, e2022JB025785. [Google Scholar] [CrossRef]
- Talwani, M. Computer Usage in the Computation of Gravity Anomalies1 1Contribution No. 1995. In Methods in Computational Physics: Advances in Research and Applications; Bolt, B.A., Ed.; Elsevier: Amsterdam, The Netherlands, 1973; Volume 13, pp. 343–389. ISBN 0076-6860. [Google Scholar]
- Laske, G.; Masters, G.; Ma, Z.; Pasyanos, M.E. Update on CRUST1.0—A 1-Degree Global Model of Earth’s Crust. Geophys. Res. Abstr. 2013, 15, 2658. [Google Scholar]
- Marks, K.M.; Smith, W.H.F. An Uncertainty Model for Deep Ocean Single Beam and Multibeam Echo Sounder Data. Mar. Geophys. Res. 2008, 29, 239–250. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Area | Max (mGal) | Min (mGal) | Avg (mGal) | Range (mGal) | SD (mGal) |
|---|---|---|---|---|---|
| Study Area R | 234.22 | 13.66 | 108.29 | 220.56 | 46.88 |
| Boundary Area M | 108.07 | 2.67 | 14.82 | 105.4 | 16.10 |
| Far Area N | 8.84 | 1.27 | 2.65 | 7.57 | 1.24 |
| Groups | Number | Coverage | Max (m) | Min (m) | Avg (m) |
|---|---|---|---|---|---|
| Group 1 | 434 | 5.4% | −2471.3 | −4103.39 | −3299.1 |
| Group 2 | 858 | 10.76% | −2304.39 | −4401.61 | −3338.99 |
| Group 3 | 1331 | 17.68% | −4585.58 | −2134.43 | −3309.82 |
| Group 4 | 2614 | 31.80% | −4585.95 | −2050.43 | −3357.43 |
| Group 5 | 872 | 16.12% | −4585.58 | −2057.5 | 3356.58 |
| Group 6 | 872 | 10.88% | −4525.84 | −2050.43 | −3298.86 |
| Groups | RMSGGM (m) | RMSAA (m) | (g/cm3) | ||
|---|---|---|---|---|---|
| Checking Points | Grid Points | Checking Points | Grid Points | ||
| Group 1 | 14.17 | 238.68 | 33.90 | 40.39 | 3.30 |
| Group 2 | 13.66 | 158.07 | 31.52 | 40.39 | 3.00 |
| Group 3 | 13.08 | 126.01 | 31.15 | 40.39 | 3.40 |
| Group 4 | 15.03 | 42.90 | 32.09 | 40.39 | 2.60 |
| Group 5 | 30.51 | 52.60 | 31.77 | 40.39 | 1.80 |
| Group 6 | 8.89 | 142.88 | 30.99 | 40.39 | 3.50 |
| Depths | Number | Coverage | Max (m) | Min (m) | Avg (m) |
|---|---|---|---|---|---|
| Part I | 820 | 8.19% | −4761 | −3946 | −4391.19 |
| Part II | 1626 | 33.19% | −5080 | −3250 | −4393.34 |
| All | 2446 | 38.53% | −5080 | −3250 | −4392.62 |
| Algorithms | RMSPart I (m) | RMSPart II (m) |
|---|---|---|
| GGMPart I | 29.83 | 204.17 |
| GGMPart II | 91.81 | 126.95 |
| Analytical Algorithm | 115.79 | 167.94 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, Y.; Xu, H.; Yu, J.; Wang, Q.; Jia, Y.; Chen, X. Comparative Study of Seafloor Topography Prediction from Gravity–Geologic Method and Analytical Algorithm. Remote Sens. 2024, 16, 3154. https://doi.org/10.3390/rs16173154
Tian Y, Xu H, Yu J, Wang Q, Jia Y, Chen X. Comparative Study of Seafloor Topography Prediction from Gravity–Geologic Method and Analytical Algorithm. Remote Sensing. 2024; 16(17):3154. https://doi.org/10.3390/rs16173154
Chicago/Turabian StyleTian, Yuwei, Huan Xu, Jinhai Yu, Qiuyu Wang, Yongjun Jia, and Xin Chen. 2024. "Comparative Study of Seafloor Topography Prediction from Gravity–Geologic Method and Analytical Algorithm" Remote Sensing 16, no. 17: 3154. https://doi.org/10.3390/rs16173154
APA StyleTian, Y., Xu, H., Yu, J., Wang, Q., Jia, Y., & Chen, X. (2024). Comparative Study of Seafloor Topography Prediction from Gravity–Geologic Method and Analytical Algorithm. Remote Sensing, 16(17), 3154. https://doi.org/10.3390/rs16173154