
Generalization of the Synthetic Aperture Radar Azimuth Multi-Aperture Processing Scheme—MAPS

 , ,
, ,
Abstract
1. Introduction
2. Canonical MAPS Theory
2.1. Recall of Canonical MAPS Problem
2.2. Limitations of the Current Models
3. MAPS in Bistatic SAR
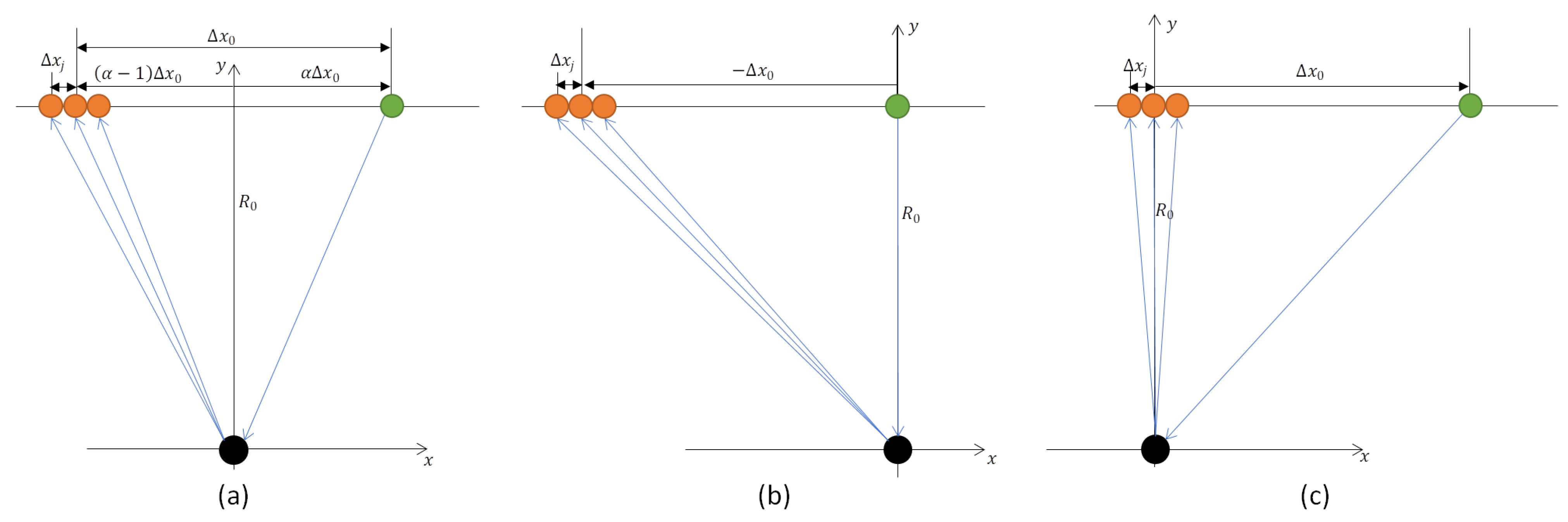
3.1. Geometry and General Hypotheses
- is the closest approach distance between the satellite and the center of the acquired swath. According to the previous hypotheses, is the same for both Tx and Rx satellites.
- is the along-track distance between the Tx and the Rx satellites. No hypothesis or constraint is assumed on its value that can even be of the same order of magnitude as the slant range .
- is the along-track constant separation between the N receiving azimuth channels of the Rx satellite. Unlike , is supposed to be much smaller than the slant range . This is likely, since we deal with channels mounted on the same physical platform.
- is a factor that defines the fraction of the along-track distance () that is between the Tx and the target placed at the origin of the reference frame. Then, is the along-track distance between the Rx and the target.
- By interpreting the relation between the single-channel, non-aliased data and the multichannel, aliased data as a Linear, Time-Invariant (LTI) filter;
- By interpreting each frequency of the azimuth SAR data as the direction of arrival (DoA) of one useful signal (to be preserved), superimposed onto () ambiguities (to be canceled out).
3.2. MAPS as an LTI Filter
3.2.1. Mathematical Modeling
- Take Taylor’s series, up to the 2nd order and around the position corresponding to the Doppler centroid of the acquisition of the hodographs, for both the jth channel and the equivalent phase center of the single Rx channel after the MAPS;
- Take the FT of the polynomial approximation of the hodographs from the previous step;
- Linearize the FT of each of the N Rx channels;
- is the time corresponding to the Doppler centroid of the acquisition using the jth channel:
- The first and the second derivative of the hodograph from Equation (12) are:
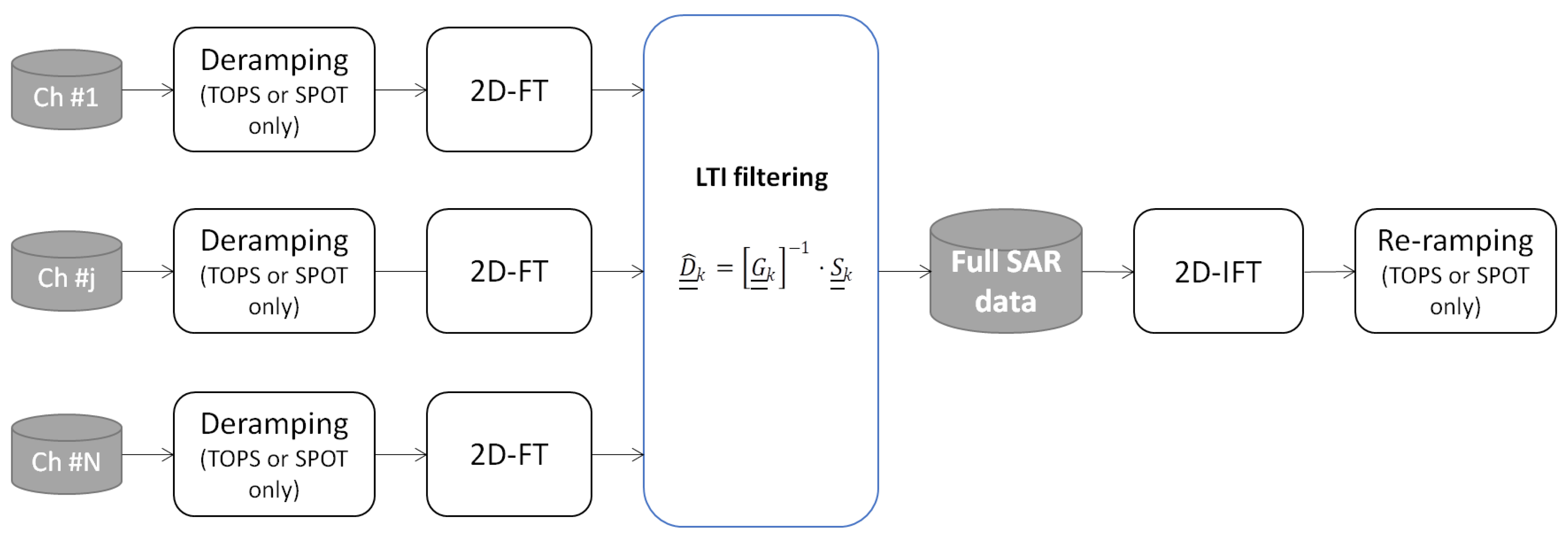
3.2.2. Processing Scheme
- Calculate a double Fourier transform of each receiving dataset and concatenate them in an (where P is the number of samples along range) matrix ;
- Make a loop on the Doppler frequency bins and for each Doppler frequency (i.e., with ), extract the samples corresponding to the multiples of PRF (i.e., ) of both data and recombination matrix .
- Determine the pseudo-inversion of the matrix to estimate the spectrum of the data corresponding to the current Doppler frequency bins, i.e.,
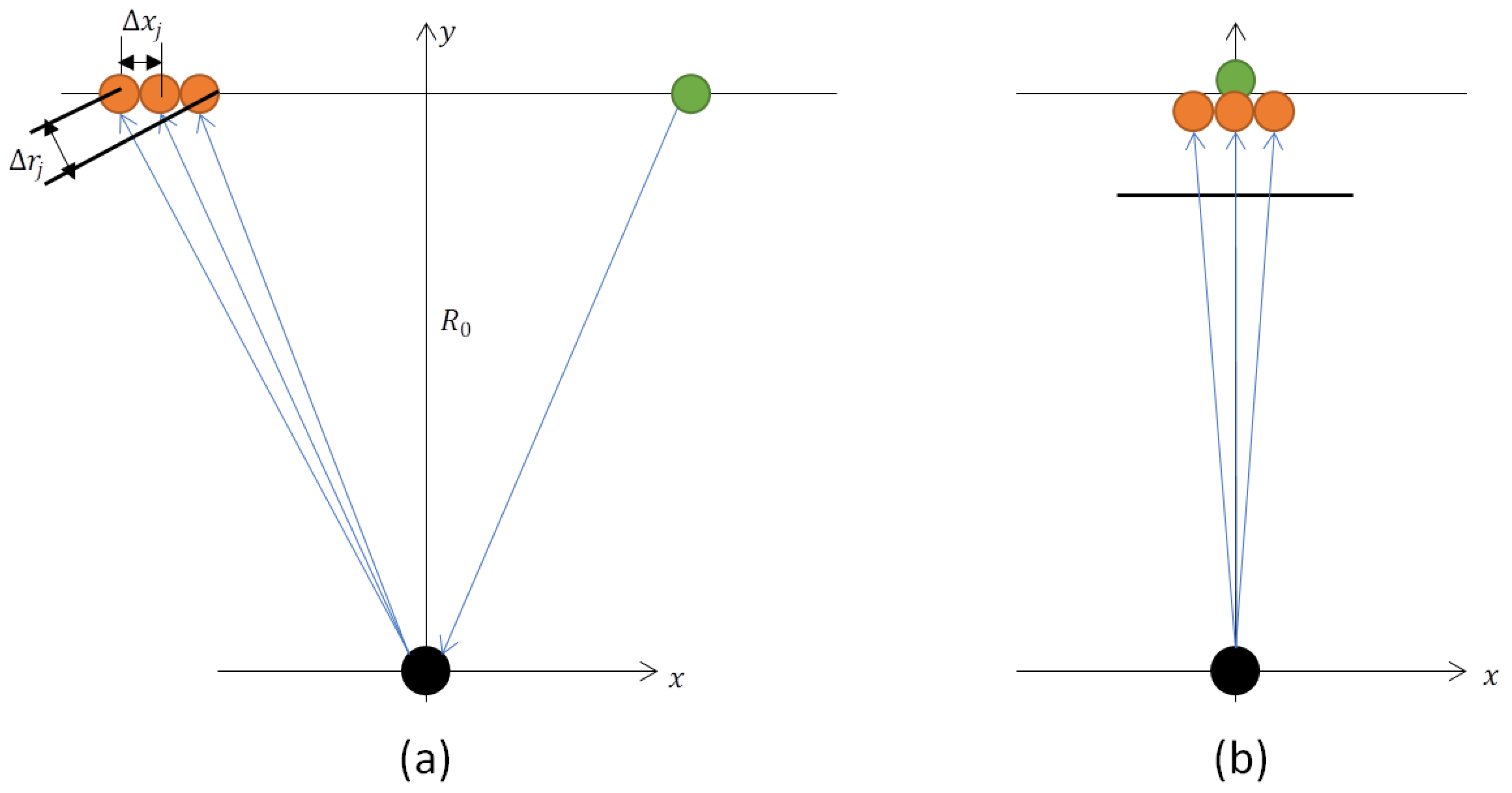
3.3. MAPS as DoA
- and are the unit vectors from the point target to the Tx and Rx sensors, respectively;
- The squint angles and are defined with respect to the zero Doppler direction of each sensor and the convention is that negative squint angles are for forward-looking sensors (thus generating a positive Doppler frequency).
- is the covariance matrix of the observations. In practical cases, the sampled correlation matrix is used instead, i.e., is the squared matrix defined as the sum of K DoAs corresponding to the nominal frequency f:K is a generic number that, according to Equation (25), goes to ∞. In practice, it is limited by the number N of azimuth channels, and increasing K over N does not bring advantages. When , there is the useful signal.
- is the vector of the main signal’s DoA. It is formally equal to the first line in Equation (26), where is computed according to the current Doppler frequency.
3.3.1. Extra Phase Compensation
3.3.2. Frequency-to-DoA Conversion in Bistatic Geometry
3.3.3. Processing Scheme
- The data from each receive channel are compensated for the phase term defined in Equation (30);
- In case of TOPS or SPOT acquisitions, deramping is applied;
- The Doppler spectrum is demodulated (i.e., centered) in the base-band interval;
- Data are transformed in the Doppler domain;
- MVDR coefficients from Equation (28) are applied to make the reconstruction;
- MAPS-recombined data go through the inverse operations of steps (4), (3), and (2), i.e., Az-IFT, azimuth modulation to nominal Doppler centroid, and re-ramping.
4. Simulation Results for Bistatic MAPS
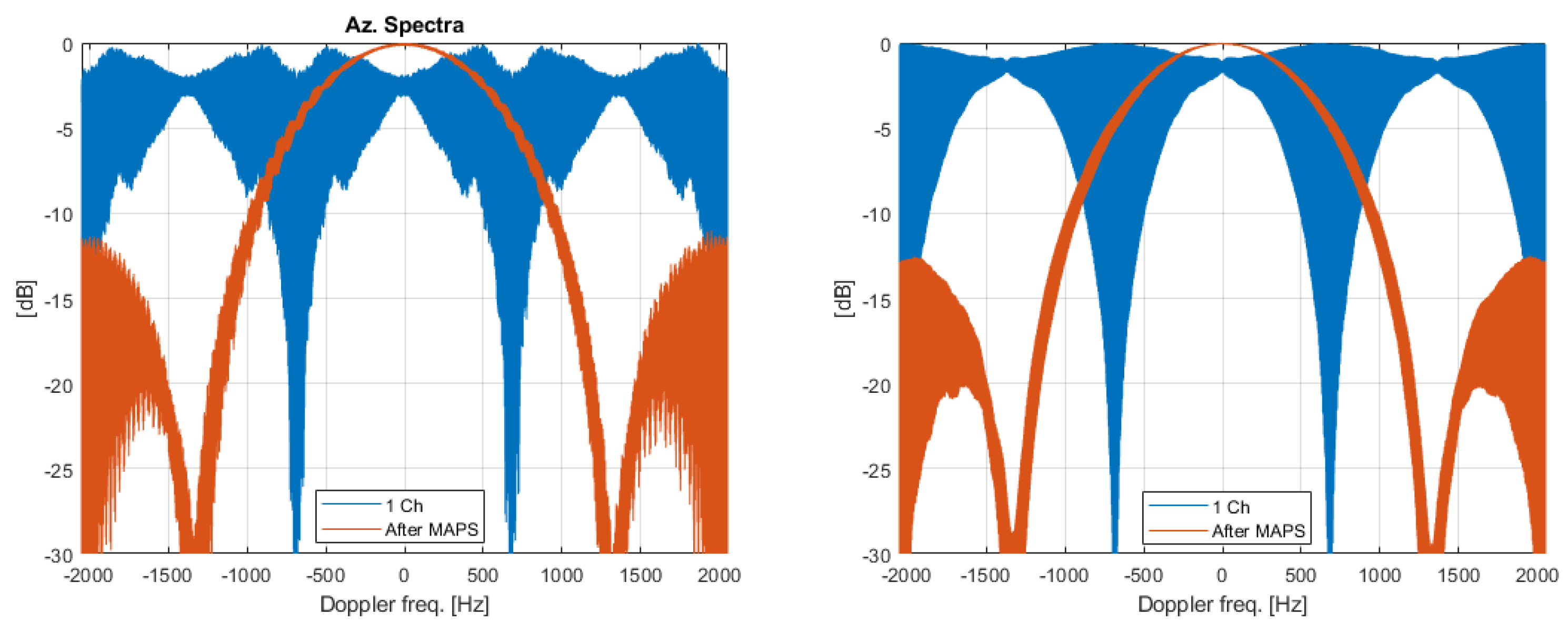
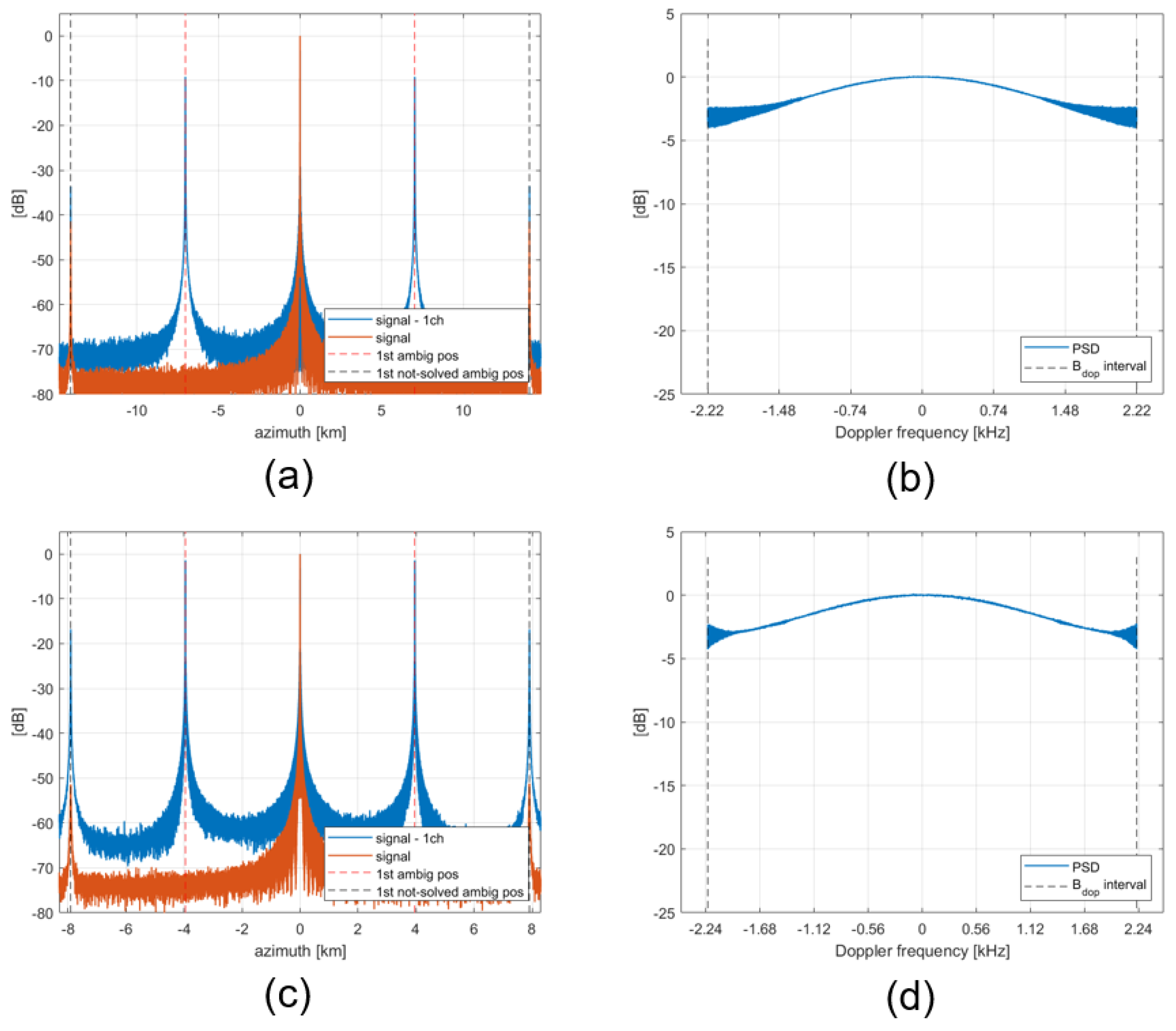
4.1. Results for MAPS as LTI Filter
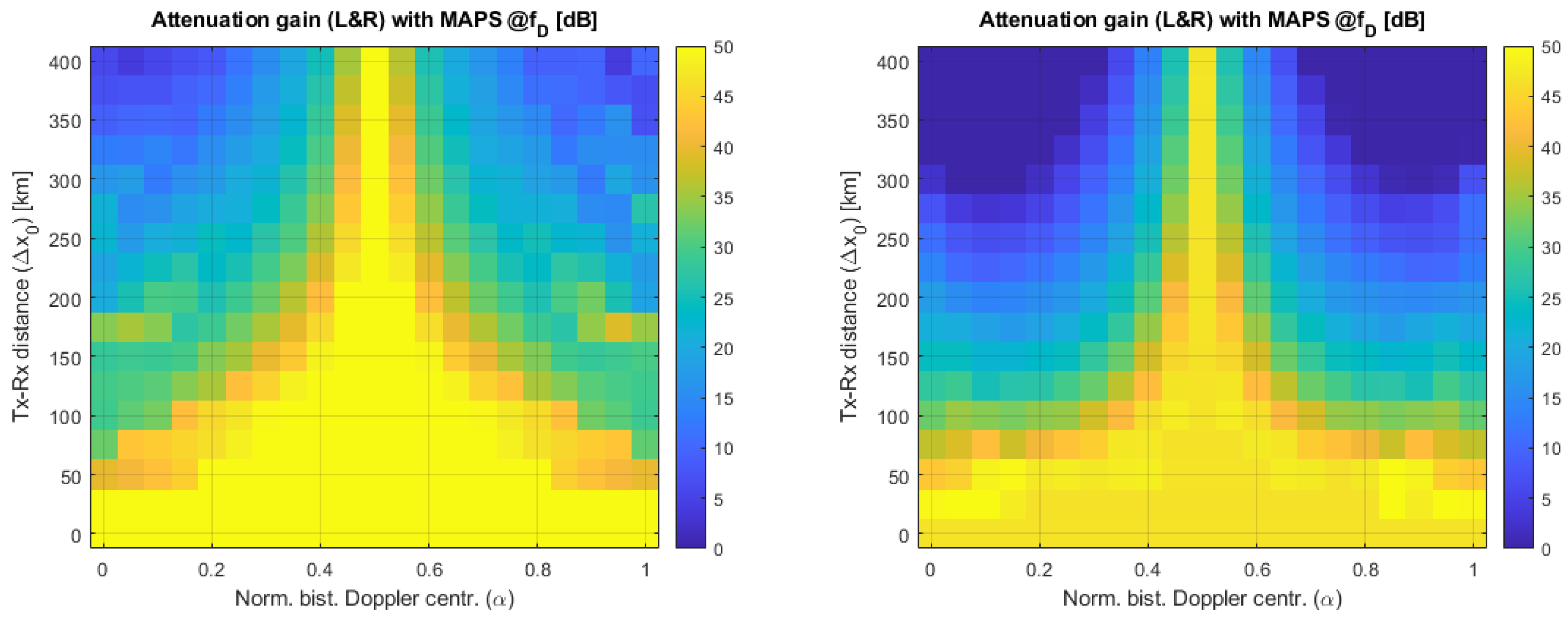
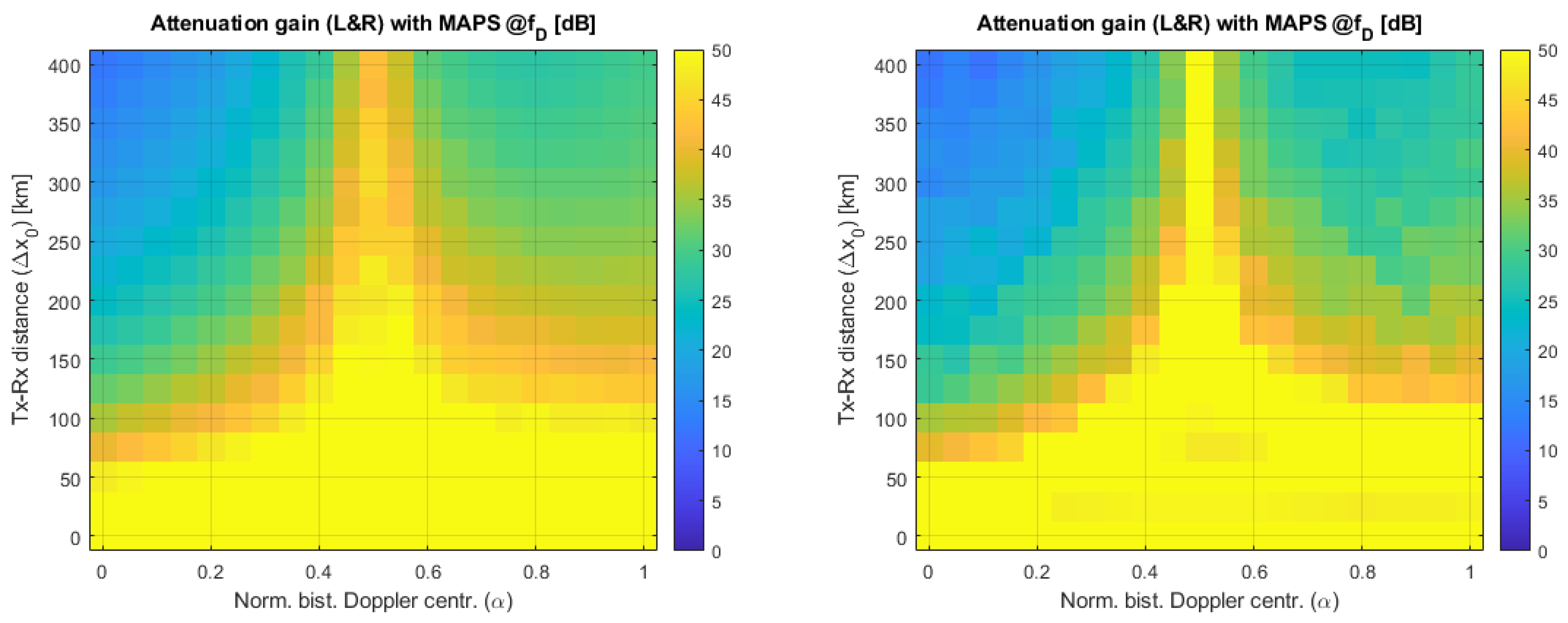
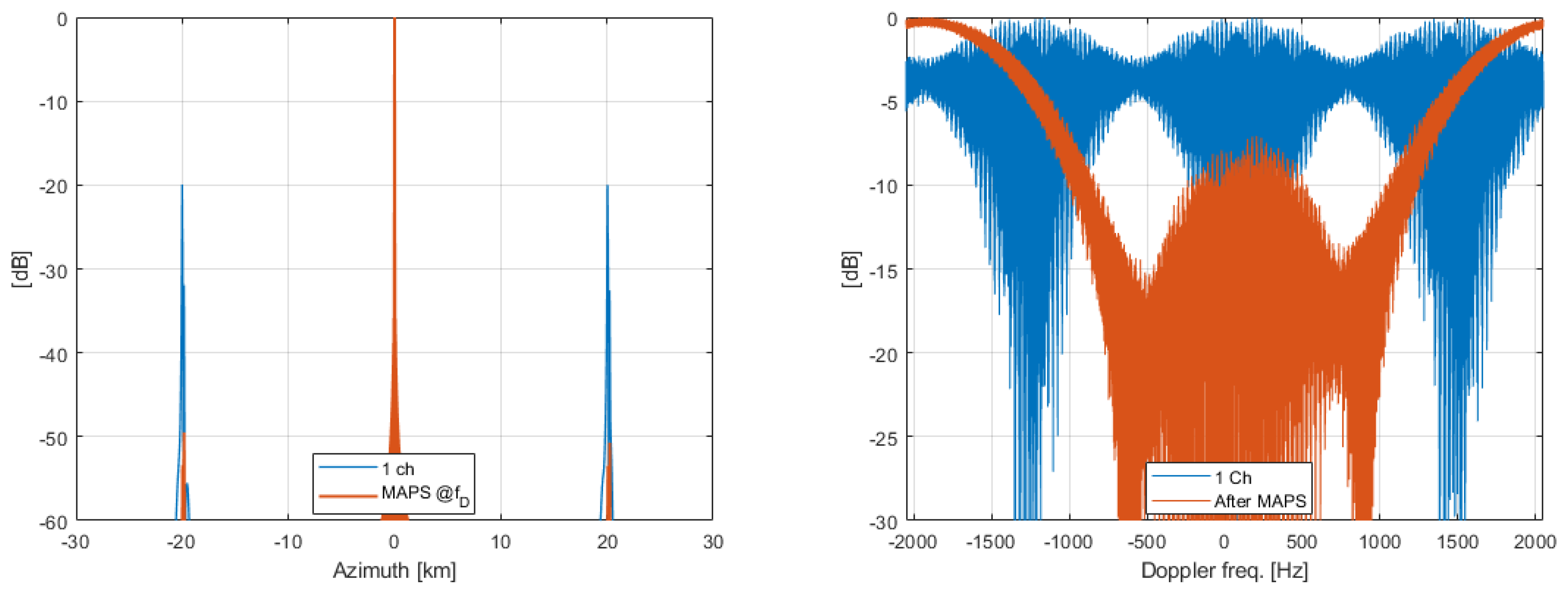
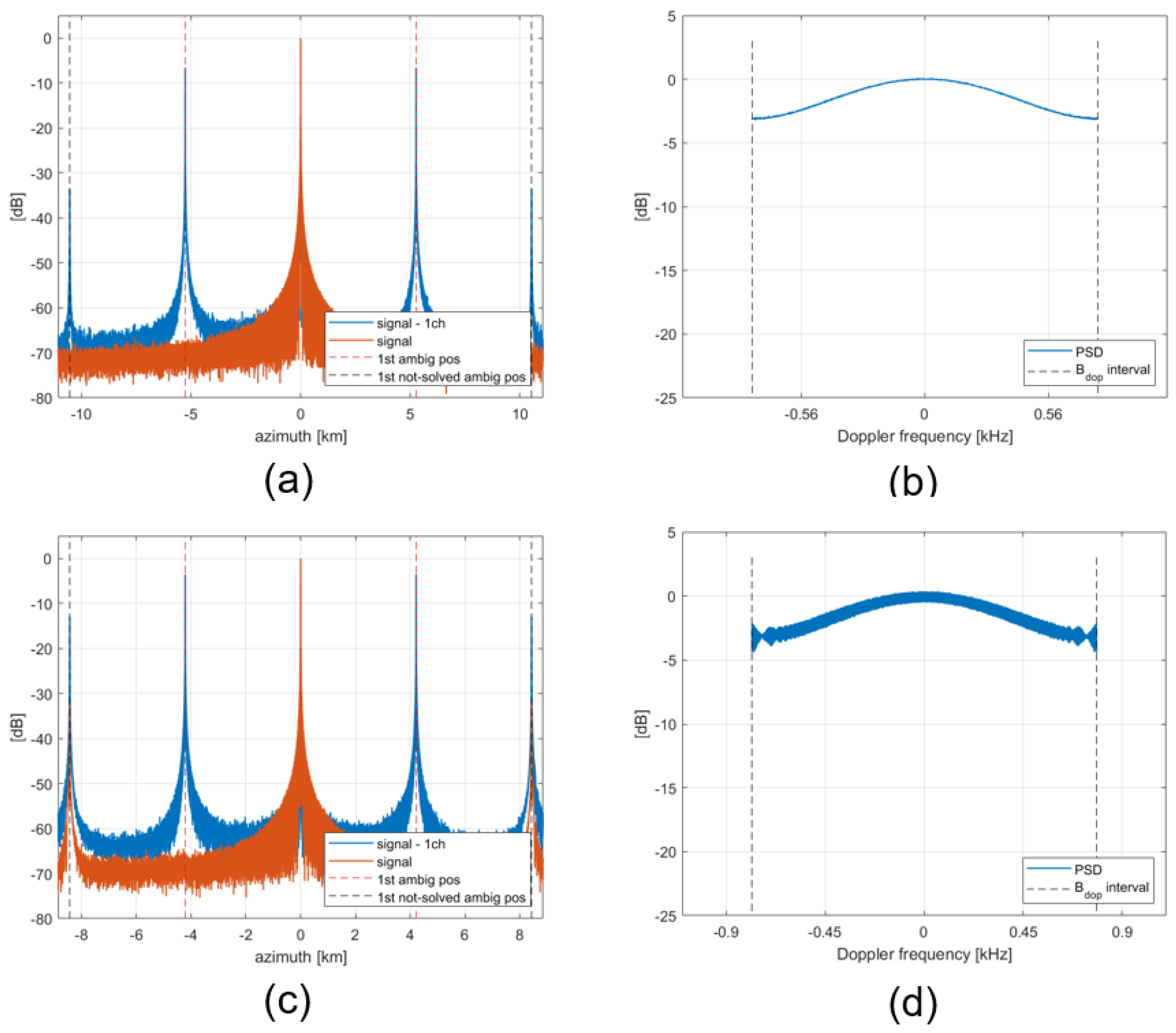
4.2. Results for MAPS as DoA Estimation
- The gain on FAAzPTAR is almost insensitive to the carrier frequency. The left and right panels of Figure 8 are fully comparable in terms of colors.
- The gain on FAAzPTAR does not nullify for extreme geometries (large Tx-Rx distances and Doppler centroid far from zero) but a significant gain on the FAAzPTAR is feasible (e.g., about 30 dB for km).
5. Generalized MAPS
5.1. Generalized Uniform PRF
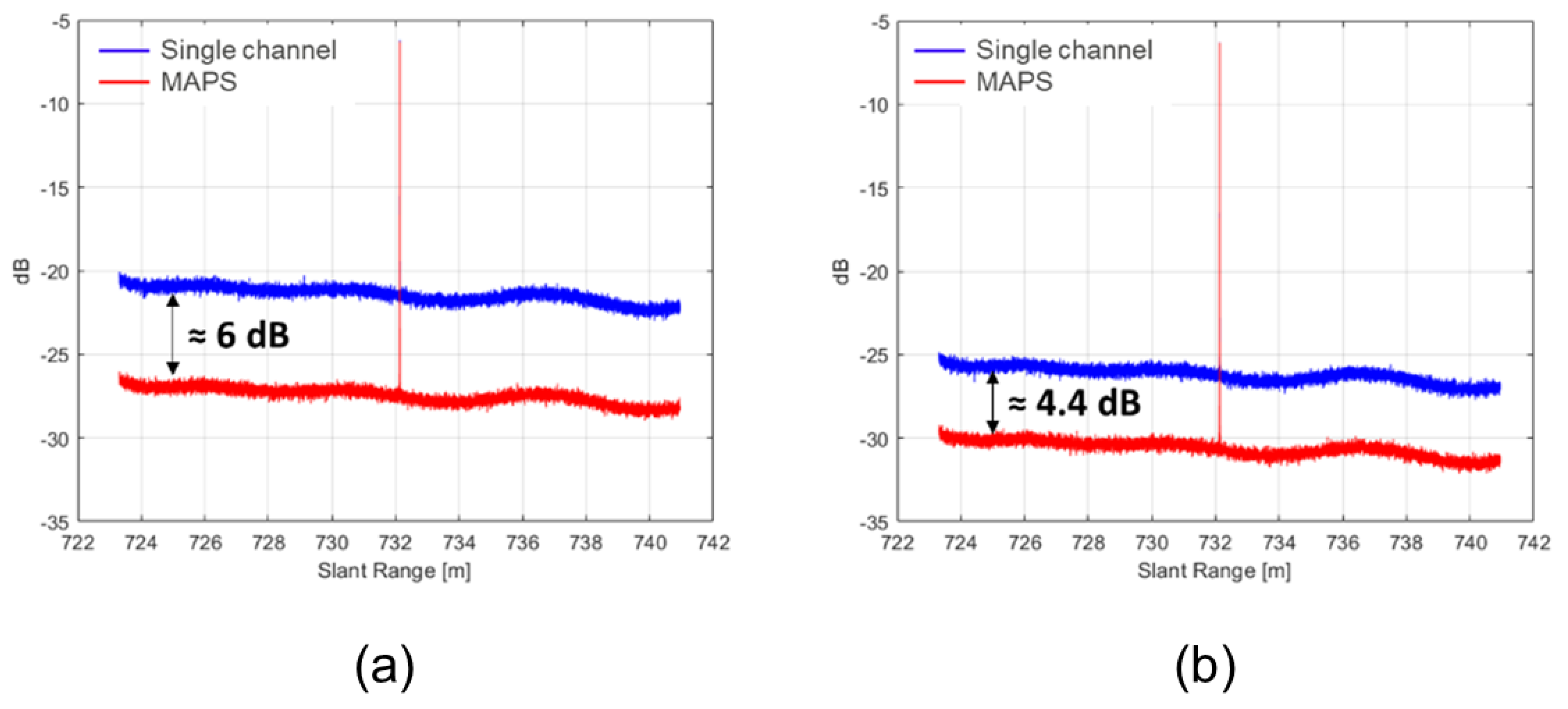
5.2. Recombination Gain for Overlapped MAPS
- The received power is still evaluated as a coherent sum, but it is achieved by summing all the terms coming from the receiving tiles in matrix multiplied by the number of digital channels N:
- The noise is now partially correlated among the digital channels, so its covariance matrix is no longer diagonal, but we can still compute the total power by summing all the elements of the covariance matrix of the noise ():
5.3. Recombination Gain for Asymmetric MAPS
6. Simulation Results for Ov-MAPS and As-MAPS
6.1. Overlapped MAPS
6.2. Asymmetric MAPS
7. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gebert, N.; Krieger, G.; Moreira, A. Digital Beamforming on Receive: Techniques and Optimization Strategies for High-Resolution Wide-Swath SAR Imaging. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 564–592. [Google Scholar] [CrossRef]
- Geudtner, D.; Tossaint, M.; Davidson, M.; Torres, R. Copernicus Sentinel-1 Next Generation Mission. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 874–876. [Google Scholar] [CrossRef]
- Davidson, M.; Kubanek, J.; Iannini, L.; Furnell, R.; Di Cosimo, G.; Gebert, N.; Petrolati, D.; Geudtner, D.; Osborne, S. Rose-L—The Copernicus L-Band Synthetic Aperture Radar Imaging Mission. In Proceedings of the IGARSS 2023—2023 IEEE International Geoscience and Remote Sensing Symposium, Pasadena, CA, USA, 16–21 July 2023; pp. 4568–4571. [Google Scholar] [CrossRef]
- Krieger, G.; Gebert, N.; Moreira, A. Unambiguous SAR signal reconstruction from nonuniform displaced phase center sampling. IEEE Geosci. Remote Sens. Lett. 2004, 1, 260–264. [Google Scholar] [CrossRef]
- Giudici, D.; Guccione, P.; Manzoni, M.; Guarnieri, A.M.; Rocca, F. Compact and Free-Floating Satellite MIMO SAR Formations. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1000212. [Google Scholar] [CrossRef]
- Guccione, P.; Monti Guarnieri, A.; Rocca, F.; Giudici, D.; Gebert, N. Along-Track Multistatic Synthetic Aperture Radar Formations of Minisatellites. Remote Sens. 2020, 12, 124. [Google Scholar] [CrossRef]
- Aguttes, J. The SAR train concept: Required antenna area distributed over N smaller satellites, increase of performance by N. In Proceedings of the IGARSS 2003. 2003 IEEE International Geoscience and Remote Sensing Symposium, Toulouse, France, 21–25 July 2023; Proceedings (IEEE Cat. No.03CH37477). IEEE: New York, NY, USA, 2003; Volume 1, pp. 542–544. [Google Scholar] [CrossRef]
- Gebert, N.; Krieger, G.; Moreira, A. Multichannel Azimuth Processing in ScanSAR and TOPS Mode Operation. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2994–3008. [Google Scholar] [CrossRef]
- Kraus, T.; Krieger, G.; Bachmann, M.; Moreira, A. Spaceborne Demonstration of Distributed SAR Imaging With TerraSAR-X and TanDEM-X. IEEE Geosci. Remote Sens. Lett. 2019, 16, 1731–1735. [Google Scholar] [CrossRef]
- Gebert, N.; Krieger, G. Azimuth Phase Center Adaptation on Transmit for High-Resolution Wide-Swath SAR Imaging. IEEE Geosci. Remote Sens. Lett. 2009, 6, 782–786. [Google Scholar] [CrossRef]
- Neo, Y.L.; Wong, F.; Cumming, I.G. A Two-Dimensional Spectrum for Bistatic SAR Processing Using Series Reversion. IEEE Geosci. Remote Sens. Lett. 2007, 4, 93–96. [Google Scholar] [CrossRef]
- D’Aria, D.; Monti Guarnieri, A. High-Resolution Spaceborne SAR Focusing by SVD-Stolt. IEEE Geosci. Remote Sens. Lett. 2007, 4, 639–643. [Google Scholar] [CrossRef]
- McDonough, R.N.; Curlander, J.C. Synthetic Aperture Radar: Systems and Signal Processing; John Wiley and Sons: Hoboken, NJ, USA, 1992; p. 672. [Google Scholar]
- Eranti, P.K.; Barkana, B.D. An Overview of Direction-of-Arrival Estimation Methods Using Adaptive Directional Time-Frequency Distributions. Electronics 2022, 11, 1321. [Google Scholar] [CrossRef]
- Jeong, S.H.; Son, B.k.; Lee, J.H. Asymptotic Performance Analysis of the MUSIC Algorithm for Direction-of-Arrival Estimation. Appl. Sci. 2020, 10, 63. [Google Scholar] [CrossRef]
- Capon, J. High-resolution frequency-wavenumber spectrum analysis. Proc. IEEE 1969, 57, 1408–1418. [Google Scholar] [CrossRef]
- Guo, X.; Wan, Q.; Zhang, Y.; Liang, J. Teaching notes of MVDR in digital signal processing (DSP). In Proceedings of the IEEE International Conference on Teaching, Assessment, and Learning for Engineering (TALE) 2012, Hong Kong, China, 20–23 August 2012; pp. H3A-5–H3A-8. [Google Scholar] [CrossRef]
- Mora, O.; Agustí, O.; Bara, M.; Broquetas, A. Direct geocoding for generation of precise wide-area elevation models with ERS SAR data. In Proceedings of the Fringe’99: Advancing ERS, SAR Interferometry from Applications towards Operations, Liège, Belgium, 10–12 November 1999; ESA: Paris, France, 2000. [Google Scholar]
- Small, D.; Schubert, A. Guide to Sentinel-1 Geocoding; Technical Report UZHS1-GC-AD; Remote Sensing Laboratory University of Zurich (RSL): Zurich, Swetzerland, 2022; p. 42. [Google Scholar]
- Villano, M.; Krieger, G. Impact of Azimuth Ambiguities on Interferometric Performance. IEEE Geosci. Remote Sens. Lett. 2012, 9, 896–900. [Google Scholar] [CrossRef]
- Zonno, M.; Richter, D.; Thaniyil Prabhakaran, A.; Rodriguez Cassola, M.; Zurita Campos, A.; Del Castillo Mena, J.; Olea Garcia, A. Impact of coherent ambiguities on InSAR performance for bistatic SAR missions: The Harmony mission case. In Proceedings of the EUSAR 2022, 14th European Conference on Synthetic Aperture Radar, Leipzig, Germany, 25–27 July 2022; pp. 1–6. [Google Scholar]
- López-Dekker, P.; Li, Y.; Iannini, L.; Prats-Iraola, P.; Rodríguez-Cassola, M. On Azimuth Ambiguities Suppression for Short-Baseline Along-Track Interferometry: The Stereoid Case. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 110–113. [Google Scholar] [CrossRef]
- Yi, N.; He, Y.; Liu, B. Improved Method to Suppress Azimuth Ambiguity for Current Velocity Measurement in Coastal Waters Based on ATI-SAR Systems. Remote Sens. 2020, 12, 3288. [Google Scholar] [CrossRef]
- Guarnieri, A. Adaptive removal of azimuth ambiguities in SAR images. IEEE Trans. Geosci. Remote Sens. 2005, 43, 625–633. [Google Scholar] [CrossRef]
- Richter, D.; Rodriguez-Cassola, M.; Zonno, M.; Prats-Iraola, P. Coherent Azimuth Ambiguity Suppression Based on Linear Optimum Filtering of Short Along-Track Baseline SAR Interferograms. In Proceedings of the EUSAR 2022, 14th European Conference on Synthetic Aperture Radar, Leipzig, Germany, 25–27 July 2022; pp. 1–5. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | UoM |
|---|---|---|---|
| Slant range zero Doppler | 650.0 | km | |
| Satellite velocity | 7500.0 | m/s | |
| Antenna length | 11.0 | m | |
| Number of MAPS channels | N | 3 | - |
| Pulse rep. freq. | 1365.4 | Hz | |
| Tx-Rx distance | km | ||
| Normalized bistatic Doppler centroid | - | ||
| Target Doppler bandwidth | Hz | ||
| Acquisition mode | - | Stripmap | - |
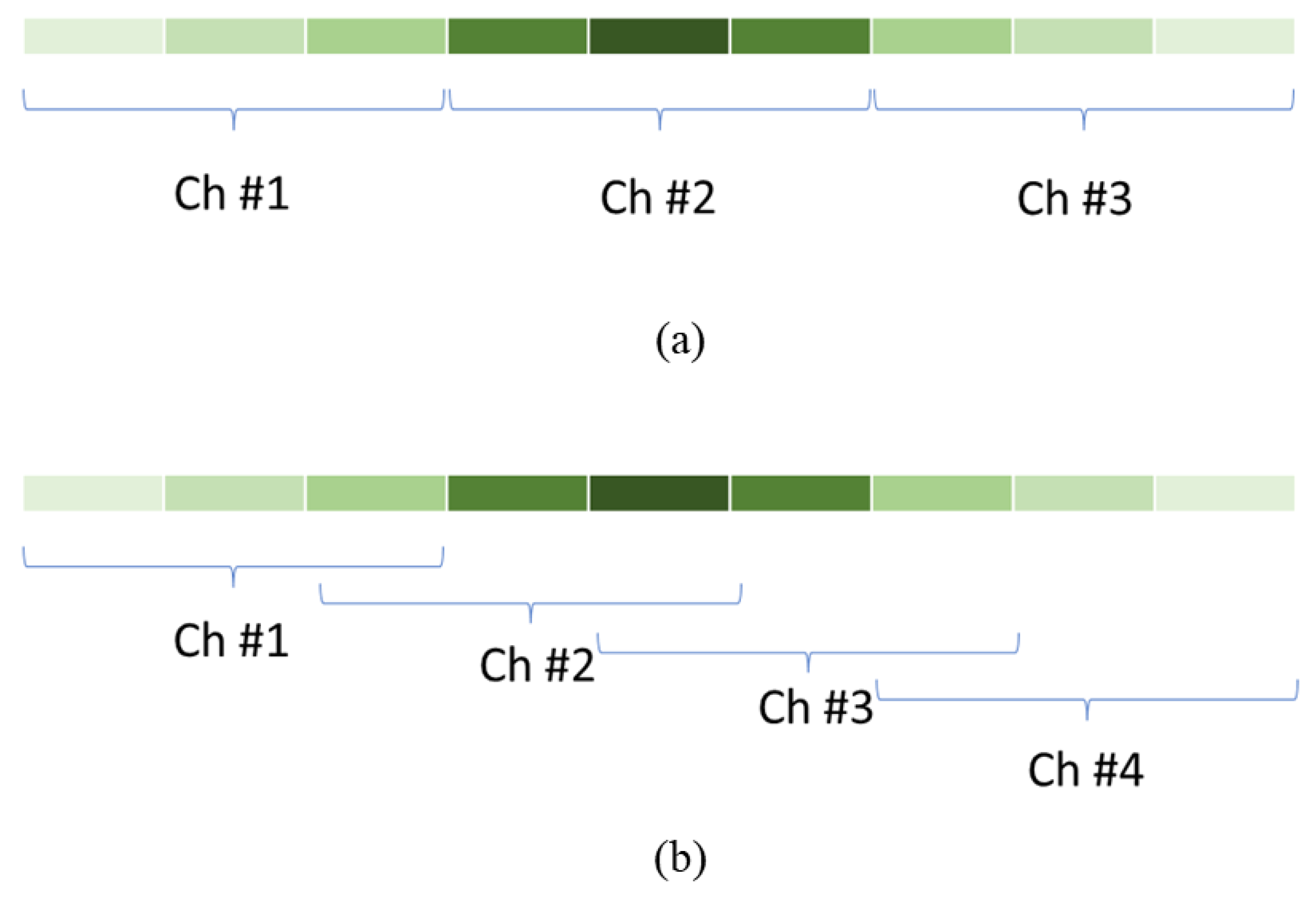
| Case | # Az. Channels | Uniform PRF | Reconstructed Spectrum |
|---|---|---|---|
| non-Ov-MAPS | 3 | ||
| Ov-MAPS | 4 |
| Parameter | Non-Ov-MAPS | Ov-MAPS | UoM |
|---|---|---|---|
| Carrier frequency | 5.405 | GHz | |
| Antenna size | 12.3 | m | |
| Uniform PRF | 1237.4 | 1392.0 | Hz |
| Actual PRF | 2474.8 | 1392.0 | Hz |
| PRF after reconstr. | 7424.4 | 5568.0 | Hz |
| # tiles | 9 | - | |
| # digital channels | 3 | 4 | - |
| RG | 4.77 | 4.26 | dB |
| AzPTAR | −41.43 | −51.19 | dB |
| AzDTAR | −30.74 | −34.99 | dB |
| Azimuth res. | 1.47 | 1.28 | m |
| Parameter | Ov-MAPS | As-MAPS | UoM |
|---|---|---|---|
| Carrier frequency | 5.405 | GHz | |
| Antenna size | 9.55 | m | |
| Uniform PRF | 1856.1 | 1484.9 | Hz |
| Actual PRF | 1856.1 | 1484.9 | Hz |
| PRF after reconstr. | 5568.3 | 4454.7 | Hz |
| # tiles | 7 | - | |
| # digital channels | 3 | - | |
| RG | 3.17 | 4.77 | dB |
| AzPTAR | −67.18 | −31.99 | dB |
| AzDTAR | −40.28 | −27.04 | dB |
| Azimuth res. | 4.52 | 4.58 | m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mapelli, D.; Guccione, P.; Giudici, D.; Stasi, M.; Imbembo, E. Generalization of the Synthetic Aperture Radar Azimuth Multi-Aperture Processing Scheme—MAPS. Remote Sens. 2024, 16, 3170. https://doi.org/10.3390/rs16173170
Mapelli D, Guccione P, Giudici D, Stasi M, Imbembo E. Generalization of the Synthetic Aperture Radar Azimuth Multi-Aperture Processing Scheme—MAPS. Remote Sensing. 2024; 16(17):3170. https://doi.org/10.3390/rs16173170
Chicago/Turabian StyleMapelli, Daniele, Pietro Guccione, Davide Giudici, Martina Stasi, and Ernesto Imbembo. 2024. "Generalization of the Synthetic Aperture Radar Azimuth Multi-Aperture Processing Scheme—MAPS" Remote Sensing 16, no. 17: 3170. https://doi.org/10.3390/rs16173170
APA StyleMapelli, D., Guccione, P., Giudici, D., Stasi, M., & Imbembo, E. (2024). Generalization of the Synthetic Aperture Radar Azimuth Multi-Aperture Processing Scheme—MAPS. Remote Sensing, 16(17), 3170. https://doi.org/10.3390/rs16173170