

Ship Lock Extraction from High-Resolution Remote Sensing Images Based on Fuzzy Theory and Prior Knowledge

 ,
, 

Abstract
1. Introduction
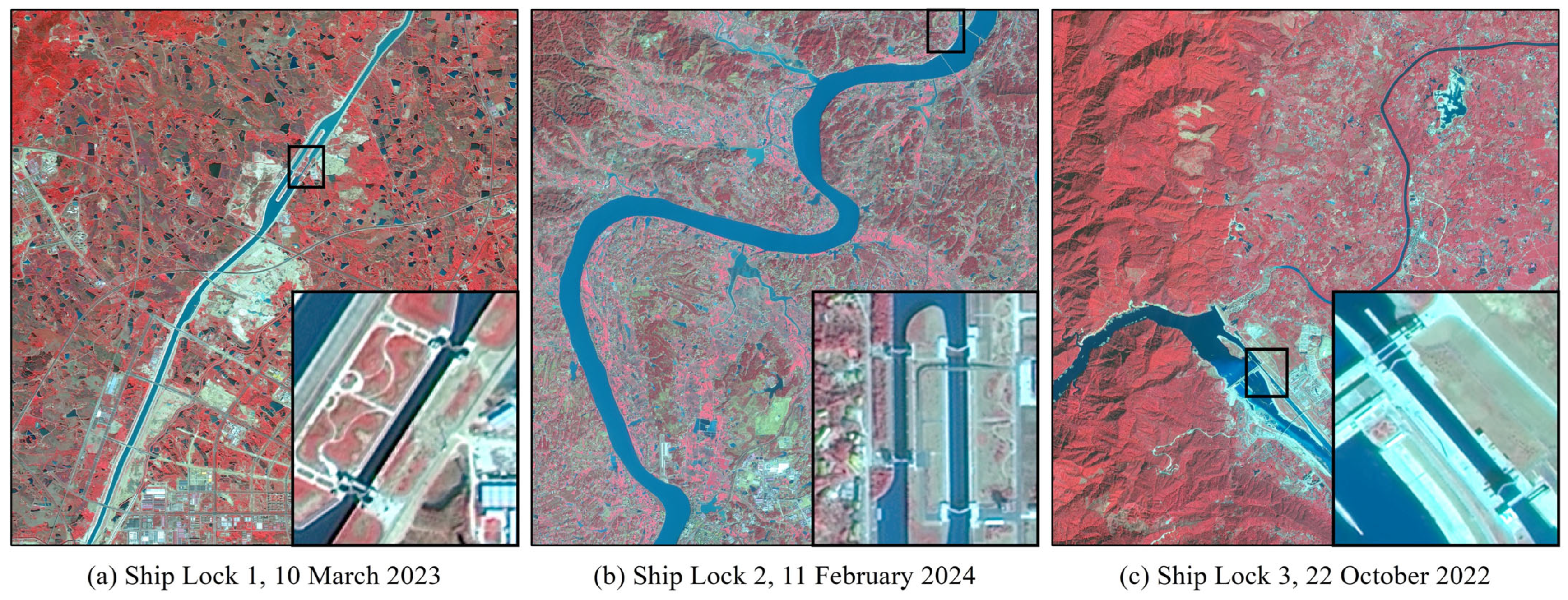
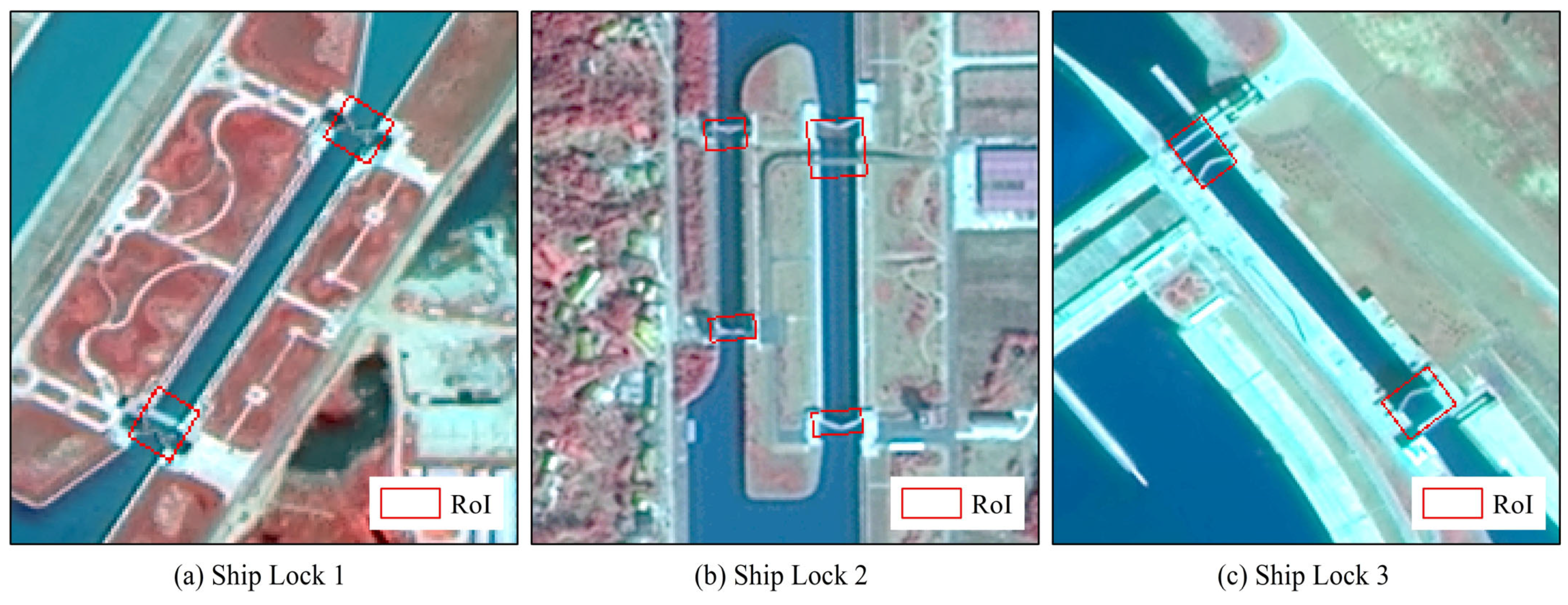
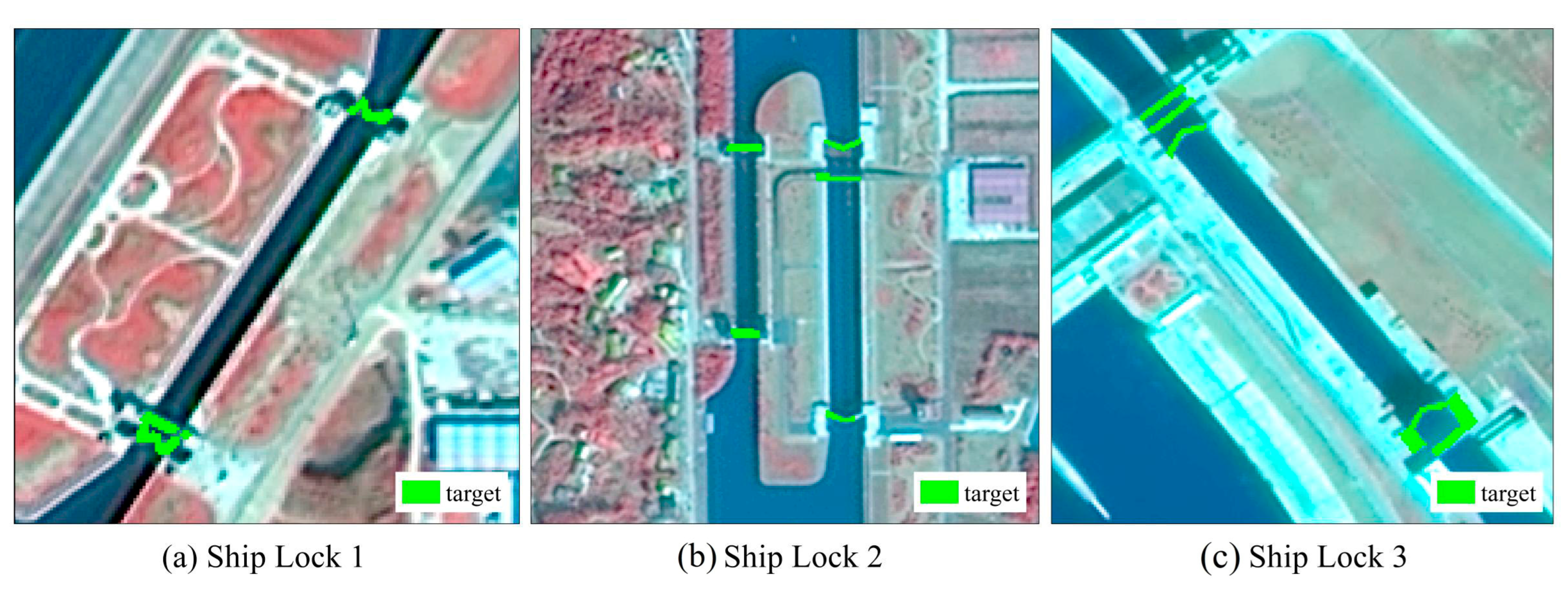
2. Materials
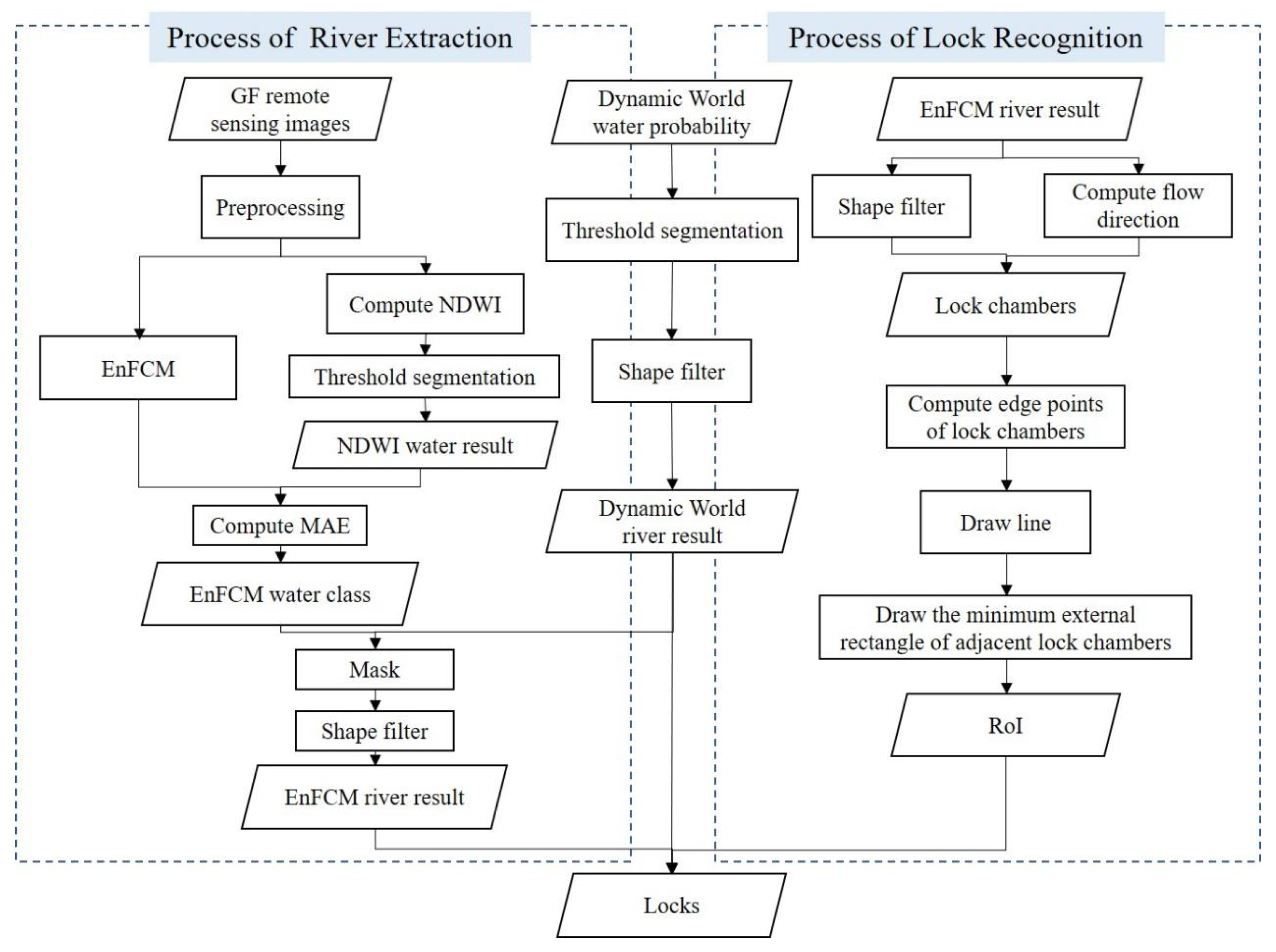
3. Methodology
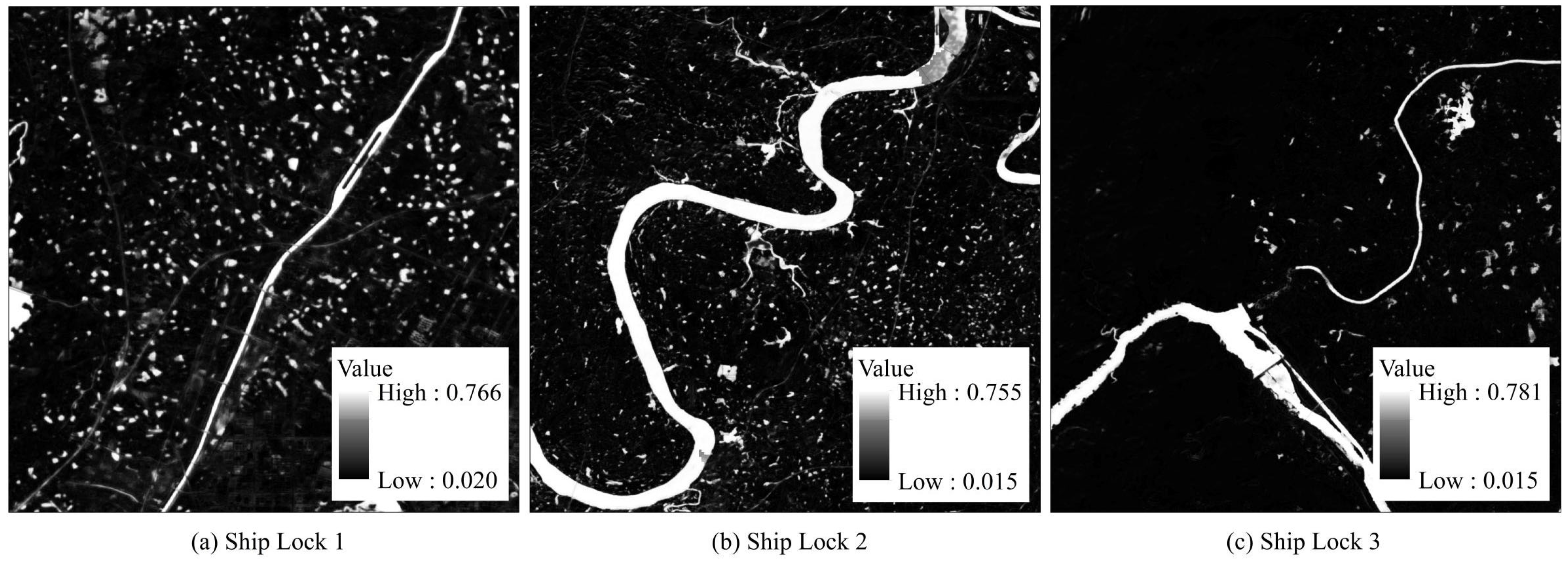
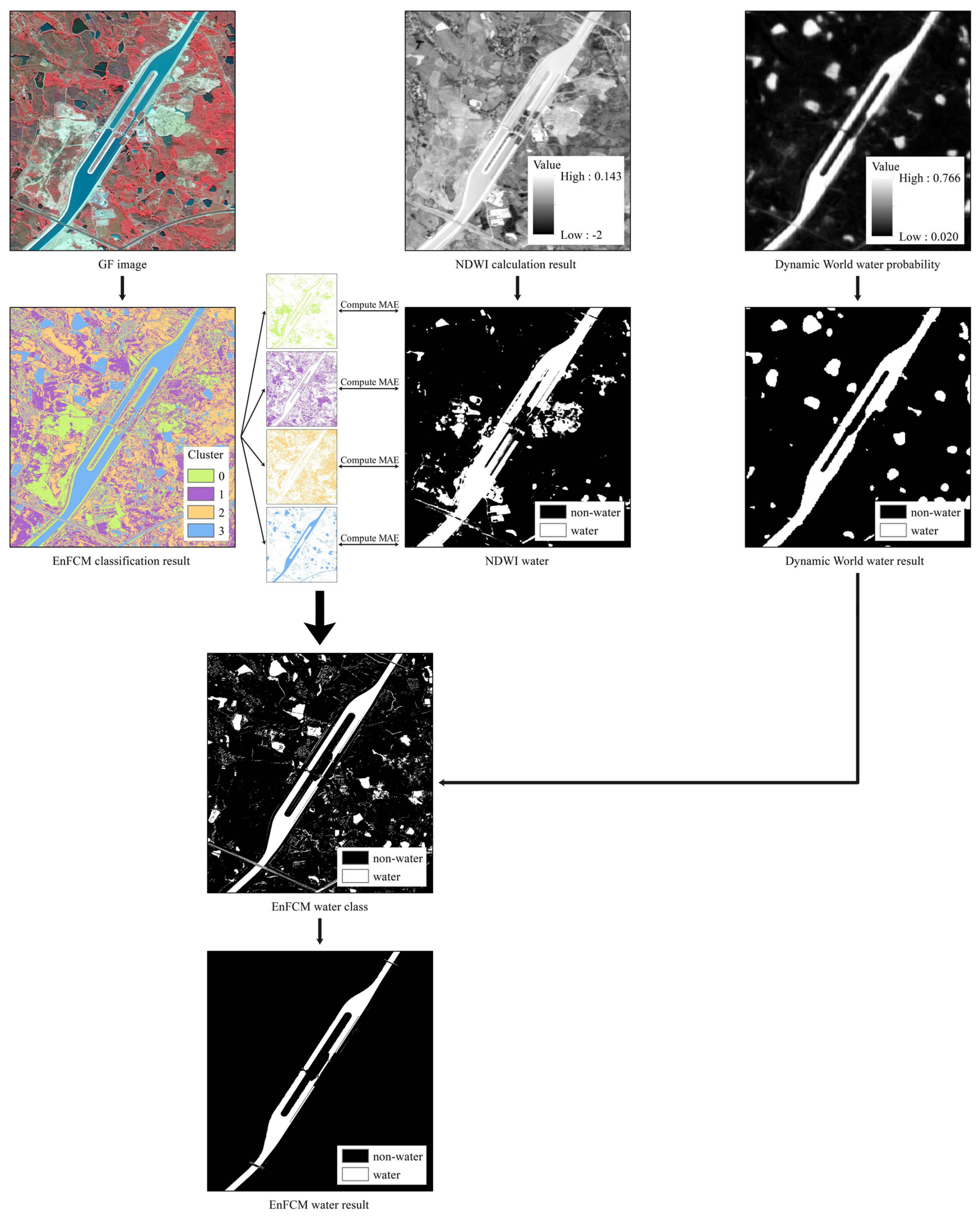
3.1. River Extraction Based on Fuzzy Theory and Water Probability
3.1.1. EnFCM Fuzzy Classification
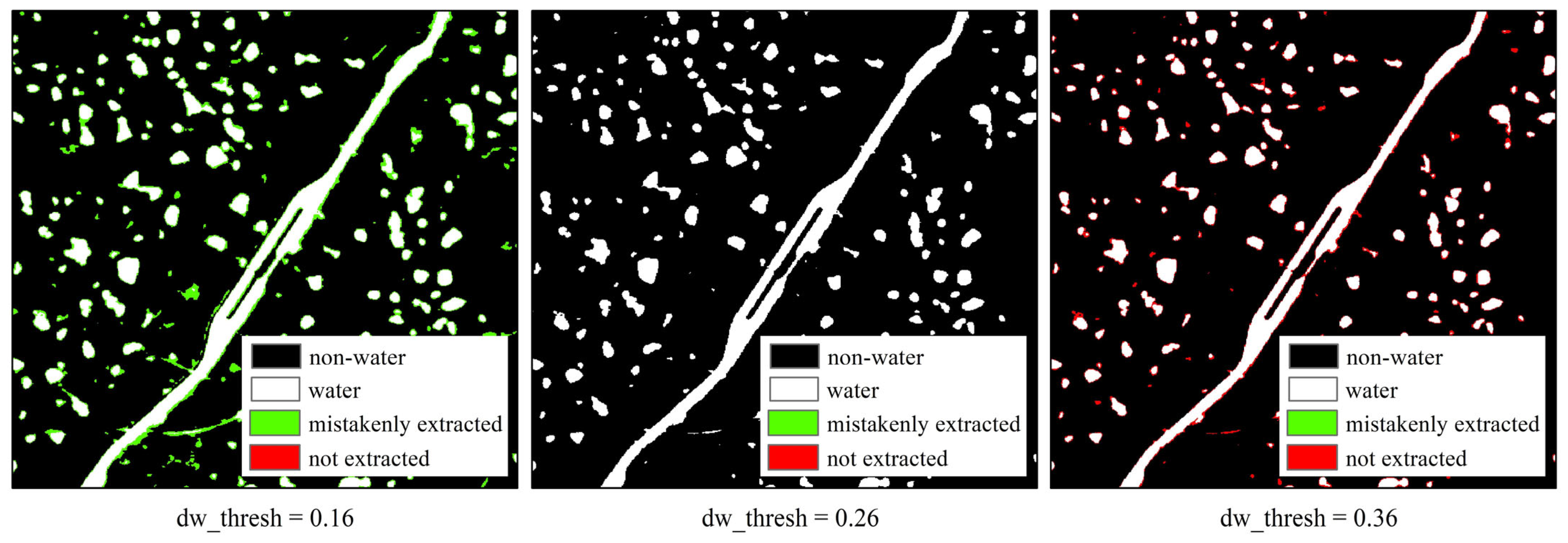
3.1.2. Determining the Water Category Based on the EnFCM Classification
3.1.3. Identifying the Extent of Rivers
3.2. Ship Lock Recognition Based on Prior Knowledge and Spectral Characteristics
3.2.1. Prior Knowledge
- Ship locks, as artificial structures, are typically constructed using materials such as concrete and metal. Their spectral characteristics differ significantly from water [32].
- Ship locks regulate the water level on both sides of the river by adjusting the gates, which is manifested in remote sensing images as dividing the river into several segments [33].
- The chamber of a ship lock has an approximately regular rectangular shape, and its area is significantly smaller than the area between the bridges across the river segment.
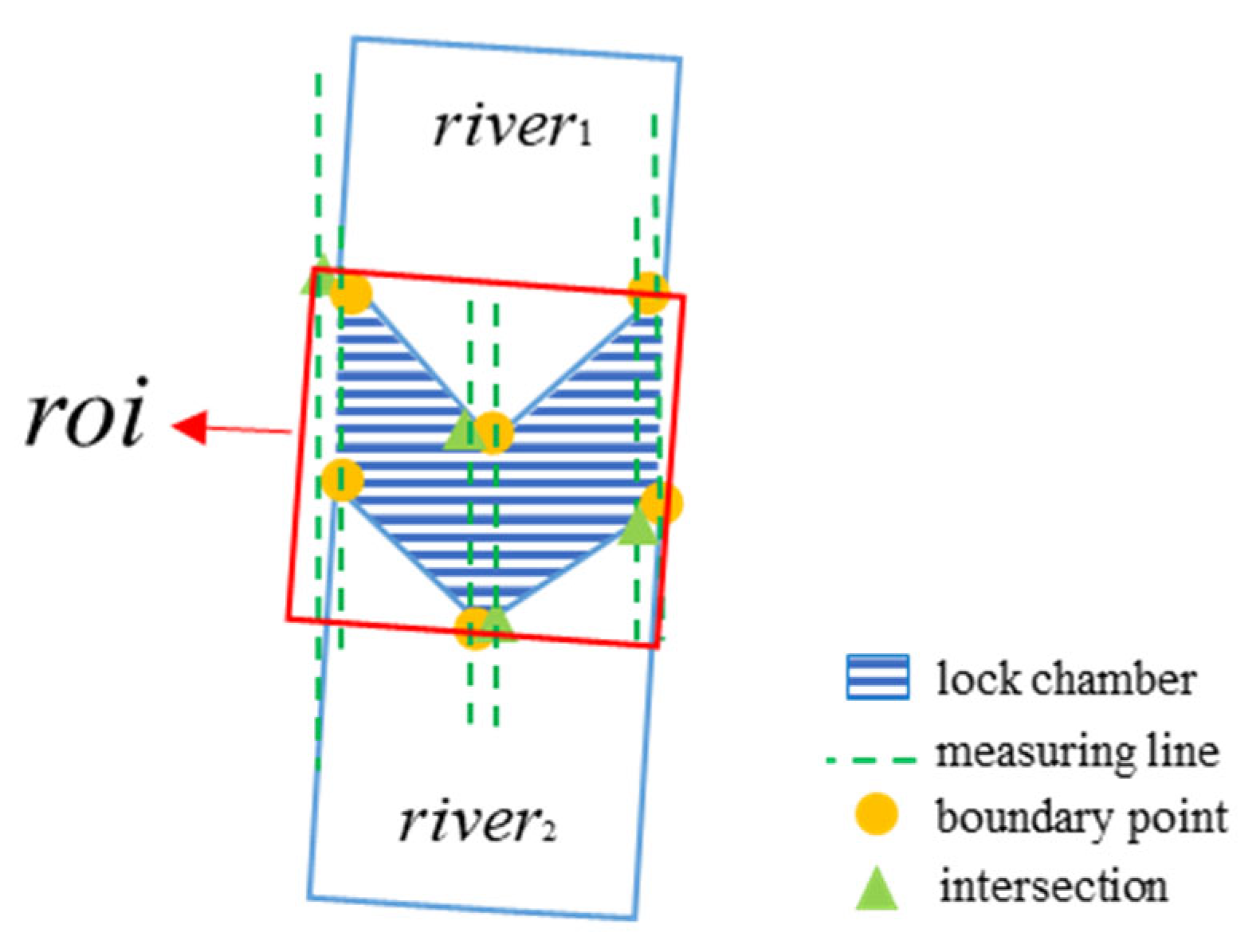
3.2.2. Determining the Region of Interest (RoI) Range
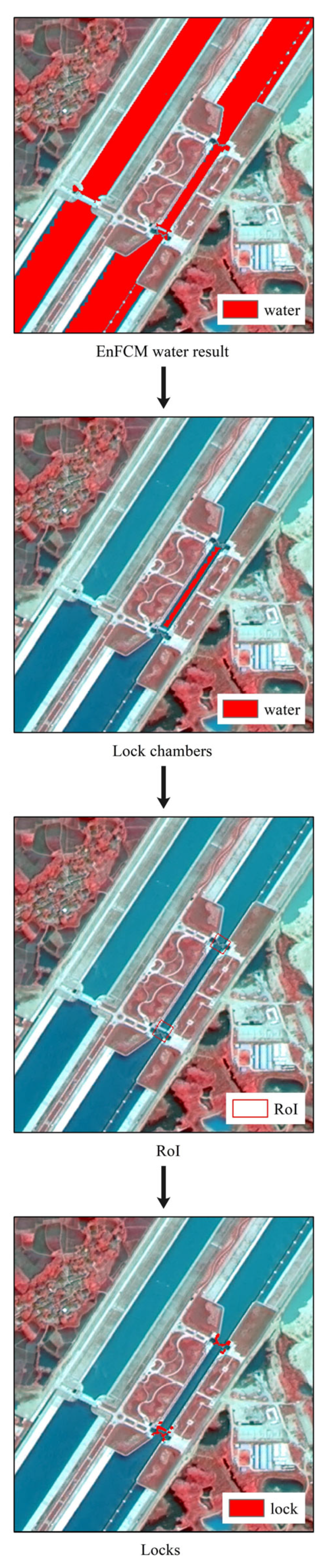
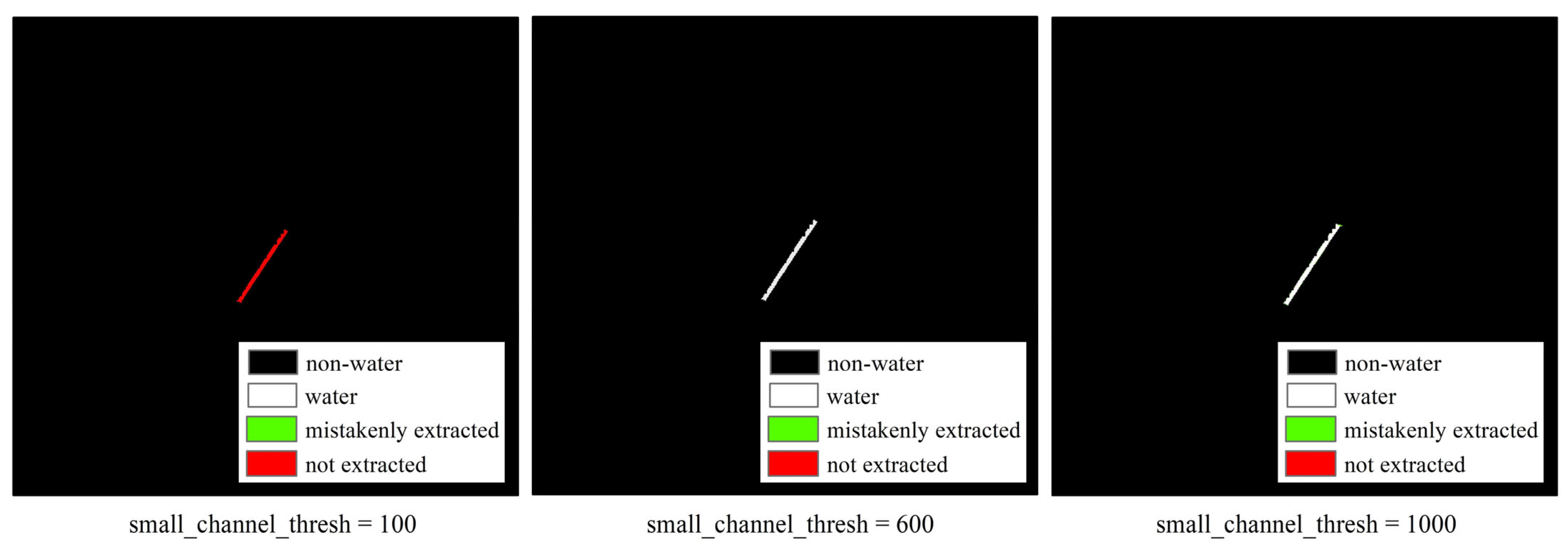
3.2.3. Ship Lock Extraction
3.3. Accuracy Verification
4. Results
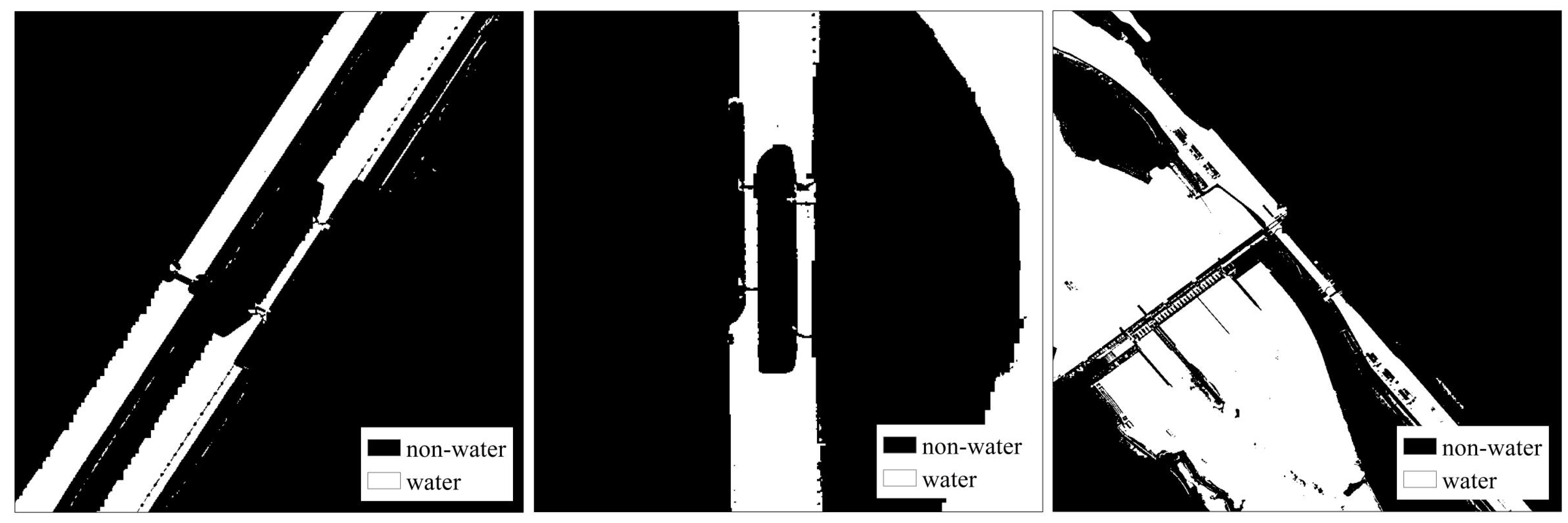
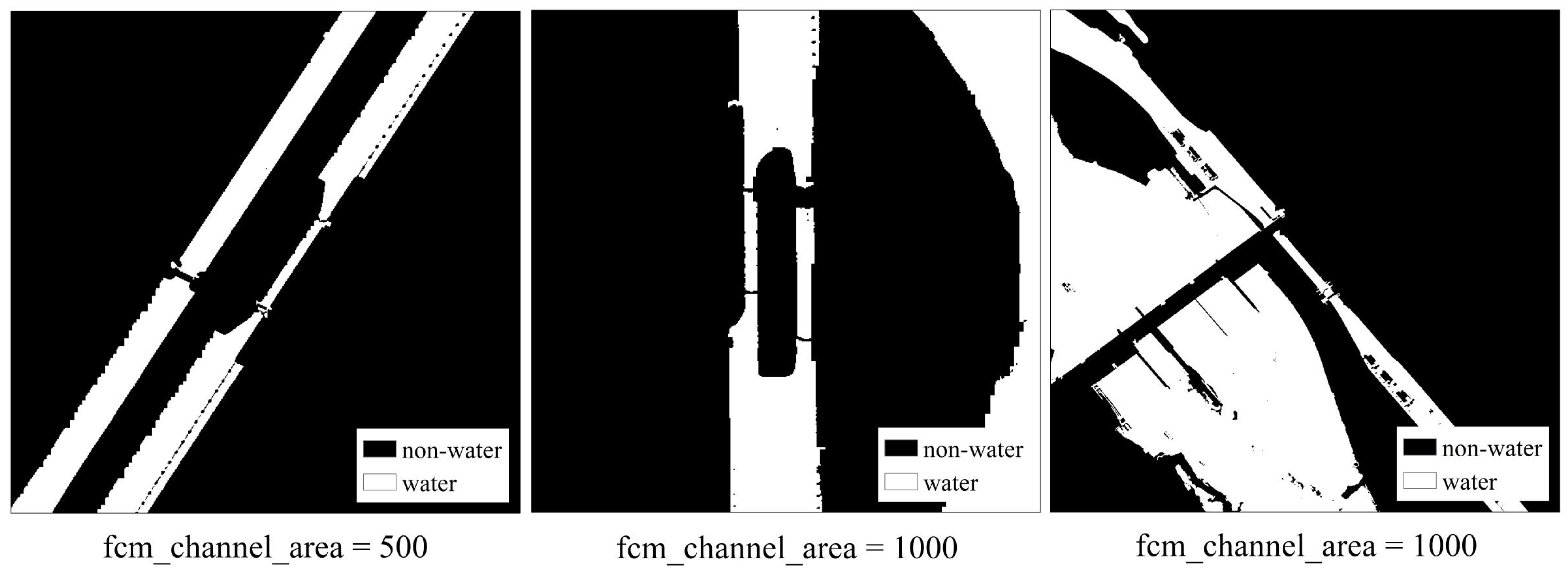
4.1. EnFCM River Results
4.2. Lock Extraction Results
4.3. Accuracy Verification Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, J.; Zang, C.; Tian, S.; Liu, J.; Yang, H.; Jia, S.; You, L.; Liu, B.; Zhang, M. Water conservancy projects in China: Achievements, challenges and way forward. Glob. Environ. Chang. 2013, 23, 633–643. [Google Scholar] [CrossRef]
- Mei, J. Flood Control Planning and Construction in China. China Water Resour. 2010, 20, 17–19+25. [Google Scholar]
- Lu, S.; Wu, B.; Wang, H.; Ouyang, N.; Guo, S. Hydro-ecological impact of water conservancy projects in the Haihe River Basin. Acta Oecologica 2012, 44, 67–74. [Google Scholar] [CrossRef]
- Bačkalić, T.; Bugarski, V.; Kulić, F.; Kanović, Ž. Adaptable Fuzzy Expert System for Ship Lock Control Support. J. Navig. 2016, 69, 1341–1356. [Google Scholar] [CrossRef]
- Liu, C.; Qi, J.; Chu, X.; Zheng, M.; He, W. Cooperative ship formation system and control methods in the ship lock waterway. Ocean. Eng. 2021, 226, 108826. [Google Scholar] [CrossRef]
- Deng, Y.; Sheng, D.; Liu, B. Managing ship lock congestion in an inland waterway: A bottleneck model with a service time window. Transp. Policy 2021, 112, 142–161. [Google Scholar] [CrossRef]
- Bugarski, V.; Bačkalić, T.; Kuzmanov, U. Fuzzy decision support system for ship lock control. Expert Syst. Appl. 2013, 40, 3953–3960. [Google Scholar] [CrossRef]
- Zhang, P.; Wang, W.; Zhou, J.; Jiang, Y.; Chen, X. Research on the Condition Monitoring of the Reverse Tainter Valve in Ship Locks. In Proceedings of the 2020 Prognostics and Health Management Conference (PHM-Besançon), Besancon, France, 4–7 May 2020; pp. 287–290. [Google Scholar]
- Su, C.; Bai, J. Structural optimization of ship lock heads during construction period considering concrete creep. Math. Probl. Eng. 2020, 2020, 5495202. [Google Scholar] [CrossRef]
- Buldgen, L.; Le Sourne, H.; Rigo, P. Simplified analytical method for estimating the resistance of lock gates to ship impacts. J. Appl. Math. 2012, 2012, 763849. [Google Scholar] [CrossRef]
- Aijun, C. Research on Automatic Recognition Algorithm of Typical Man-Made Targets; Harbin Institute of Technology: Harbin, China, 2008. [Google Scholar]
- Changfei, T. Research on road bridge extraction method based on satellite data. Sci. Technol. Inf. 2018, 16, 65–66. [Google Scholar]
- Chen, C.; Qin, Q.; Zhang, N.; Li, J.; Chen, L.; Wang, J.; Qin, X.; Yang, X. Extraction of bridges over water from high-resolution optical remote-sensing images based on mathematical morphology. Int. J. Remote Sens. 2014, 35, 3664–3682. [Google Scholar] [CrossRef]
- Lu, H.; Deng, Y.; Huang, Z.; Zhang, J. Extraction of bridges from high resolution remote sensing image based on topology modeling. In Proceedings of the 2014 IEEE International Conference on Cloud Engineering, Boston, MA, USA, 11–14 March 2014; pp. 494–499. [Google Scholar]
- Fu, Y.; Xing, K.; Huang, Y.; Xiao, Y. Recognition of bridge over water in high-resolution remote sensing images. In Proceedings of the 2009 WRI World Congress on Computer Science and Information Engineering, Los Angeles, CA, USA, 31 March–2 April 2009; Volume 2, pp. 621–625. [Google Scholar]
- Xue, J.; Zheng, Y.; Dong-Ye, C.; Wang, P.; Yasir, M. Improved YOLOv5 network method for remote sensing image-based ground objects recognition. Soft Comput. 2022, 26, 10879–10889. [Google Scholar] [CrossRef]
- Yang, M.S.; Hu, Y.J.; Lin, K.C.R.; Lin, C.C.L. Segmentation techniques for tissue differentiation in MRI of Ophthalmology using fuzzy clustering algorithms. Magn. Reson. Imaging 2002, 20, 173–179. [Google Scholar] [CrossRef]
- Chuang, K.S.; Tzeng, H.L.; Chen, S.; Wu, J.; Chen, T.J. Fuzzy c-means clustering with spatial information for image segmentation. Comput. Med. Imaging Graph. 2006, 30, 9–15. [Google Scholar] [CrossRef]
- Liu, J.; Xu, M. Kernelized fuzzy attribute C-means clustering algorithm. Fuzzy Set Syst. 2008, 159, 2428–2445. [Google Scholar] [CrossRef]
- Szilagyi, L.; Benyo, Z.; Szilagyii, S.M.; Adam, H.S. MR brain image segmentation using an enhanced fuzzy cmeans algorithm. In Proceedings of the 25th Annual International Conference of IEEE EMBS, Cancun, Mexico, 17–21 September 2003; pp. 17–21. [Google Scholar]
- Singh, T.; Gosain, A. Comparison of Different Fuzzy Clustering Algorithms: A Replicated Case Study. In Information and Decision Sciences; Satapathy, S., Tavares, J., Bhateja, V., Mohanty, J., Eds.; Advances in Intelligent Systems and Computing; Springer: Singapore, 2018; Volume 701, pp. 267–275. [Google Scholar] [CrossRef]
- Torra, V. On Fuzzy c-Means and Membership Based Clustering. In Advances in Computational Intelligence; Rojas, I., Joya, G., Catala, A., Eds.; IWANN 2015; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2015; Volume 9094. [Google Scholar] [CrossRef]
- Chen, X.; Zhu, J.; Zhang, Z. Researching on the Single Lock Chamber Automatic Layout Algorithm. Appl. Mech. Mater. 2014, 678, 39–42. [Google Scholar] [CrossRef]
- Brown, C.F.; Brumby, S.P.; Guzder-Williams, B.; Birch, T.; Hyde, S.B.; Mazzariello, J.; Czerwinski, W.; Pasquarella, V.J.; Haertel, R.; Ilyushchenko, S.; et al. Dynamic World, Near real-time global 10 m land use land cover mapping. Sci. Data 2022, 9, 251. [Google Scholar] [CrossRef]
- Zhang, W.; Li, C.; Zhang, Y.-Z. A new hybrid algorithm for image segmentation based on rough sets and enhanced fuzzy c-means clustering. In Proceedings of the 2009 IEEE International Conference on Automation and Logistics, Shenyang, China, 5–7 August 2009; pp. 1212–1216. [Google Scholar]
- Daskalakis, A.; Cavouras, D.; Bougioukos, P.; Kostopoulos, S.; Georgiadis, P.; Kalatzis, I.; Kagadis, G.; Nikiforidis, G. Genes expression level quantification using a spot-based algorithmic pipeline. In Proceedings of the 2007 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Lyon, France, 22–26 August 2007; pp. 1148–1151. [Google Scholar]
- McFeeters, S.K. The use of the Normalized Difference Water Index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Willmott, C.J.; Matsuura, K. Advantages of the mean absolute error (MAE) over the root mean square error (RMSE) in assessing average model performance. Clim. Res. 2005, 30, 79–82. [Google Scholar] [CrossRef]
- Guo, H.; He, G.; Jiang, W.; Yin, R.; Yan, L.; Leng, W. A Multi-Scale Water Extraction Convolutional Neural Network (MWEN) Method for GaoFen-1 Remote Sensing Images. ISPRS Int. J. Geo-Inf. 2020, 9, 189. [Google Scholar] [CrossRef]
- Wang, T.; Li, T. Ship lock management and dynamic congestion toll for ships. Ocean. Coast. Manag. 2022, 230, 106369. [Google Scholar] [CrossRef]
- Zhang, H.; Ke, J. An Intelligent Scheduling System and Hybrid Optimization Algorithm for Ship Locks of the Three Gorges Hub on the Yangtze River. Mech. Syst. Signal Process. 2024, 208, 110974. [Google Scholar] [CrossRef]
- Fan, Q.; Zhu, H.; Geng, J. Monitoring result analyses of high slope of five-step ship lock in the Three Gorges Project. J. Rock Mech. Geotech. Eng. 2015, 7, 199–206. [Google Scholar] [CrossRef]
- Chen, C.; Qin, Q.M.; Chen, L.; Wang, J.L.; Liu, M.C.; Wen, Q. Extraction of water bridges from high-resolution remote sensing images based on spectral feature analysis of ground objects. Spectrosc. Spectr. Anal. 2013, 33, 718–722. [Google Scholar]
- Zhang, J.; Zhao, X.; Chen, Z.; Lu, Z. A Review of Deep Learning-Based Semantic Segmentation for Point Cloud. IEEE Access 2019, 7, 179118–179133. [Google Scholar] [CrossRef]
- Zhao, D.; Yuan, B.; Gao, Y.; Qi, X.; Shi, Z. UGCNet: An Unsupervised Semantic Segmentation Network Embedded With Geometry Consistency for Remote-Sensing Images. IEEE Geosci. Remote Sens. Lett. 2022, 19, 5510005. [Google Scholar] [CrossRef]
- Tian, L.; Zhong, X.; Chen, M. Semantic Segmentation of Remote Sensing Image Based on GAN and FCN Network Model. Sci. Program. 2021, 2021, 9491376. [Google Scholar] [CrossRef]
- Vagnoli, M.; Remenyte-Prescott, R. An automatic bridge damage diagnostics method using empirical mode decomposition based health indicators and neuro-fuzzy classification. Struct. Control. Health Monit. 2022, 29, e3027. [Google Scholar] [CrossRef]
- Zhou, Y.; Chu, X.; Jiang, Z.; Yu, Z. Research on Navigation Risk Identification of Three Gorges Ship Lock Based on Improved Analytic Hierarchy Process. In Proceedings of the 2019 5th International Conference on Transportation Information and Safety (ICTIS), Liverpool, UK; 2019; pp. 276–280. [Google Scholar]
- Liu, C.; Wang, S.; Yang, J. Context Feature Based Bridge Detection for Polarimetric SAR Images. In Proceedings of the IGARSS 2023—2023 IEEE International Geoscience and Remote Sensing Symposium, Pasadena, CA, USA, 16–21 July 2023; pp. 7777–7780. [Google Scholar]
- Liu, R.; Jiang, Z.; Wang, C.; Tao, X. A Population-Based Ant Algorithm for the Lock Chamber Arrangement Problem. In Proceedings of the 2020 IEEE 6th International Conference on Control Science and Systems Engineering (ICCSSE), Beijing, China, 17–19 July 2020; pp. 82–85. [Google Scholar]
- Chen, A. Novel Approach for Recognizing Bridges over Water in Large Remote Sensing Images. In Proceedings of the 2008 International Symposium on Computational Intelligence and Design, Wuhan, China, 17–18 October 2008; pp. 47–51. [Google Scholar]
- Kalidindi, M.K.; Khosa, R.; Bairwa, A.K. Extraction of flow features around a bridge pier with an evolving scour hole using Lagrangian coherent structures. Phys. Fluids 2024, 36, 055133. [Google Scholar] [CrossRef]
- Shi, S.; Zhang, D.; Su, Y.; Wan, C.; Zhang, M.; Liu, C. A Fuzzy-Based Decision-Making Model for Improving the Carrying Capacity of Ship Locks: A Three Gorges Dam Case. J. Mar. Sci. Eng. 2019, 7, 244. [Google Scholar] [CrossRef]
- Tang, R.; Dong, G. Bridge-over-water detection via modulated deformable convolution and attention mechanisms. EURASIP J. Adv. Signal Process. 2022, 2022, 56. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Threshold Name | Description | Value | |
|---|---|---|---|
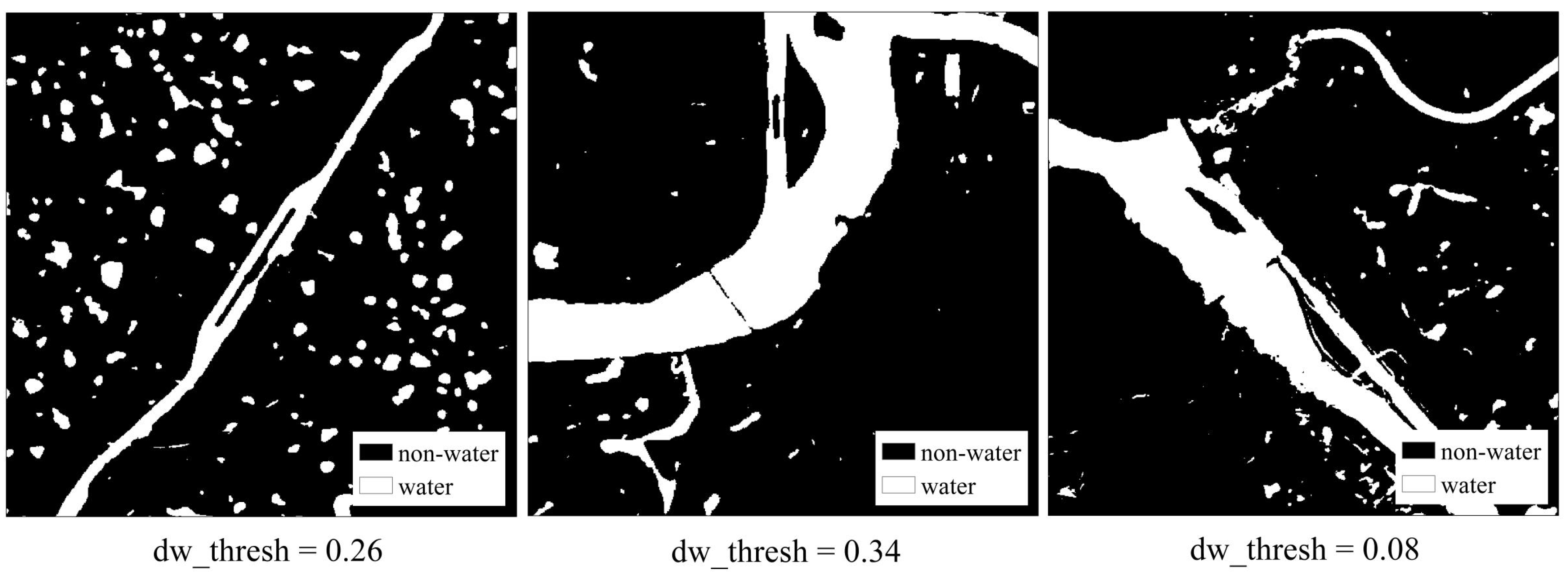
| dw_thresh | Water body probability threshold, used to binarize DW water bodies. | Ship Lock 1 | 0.26 |
| Ship Lock 2 | 0.34 | ||
| Ship Lock 3 | 0.08 | ||
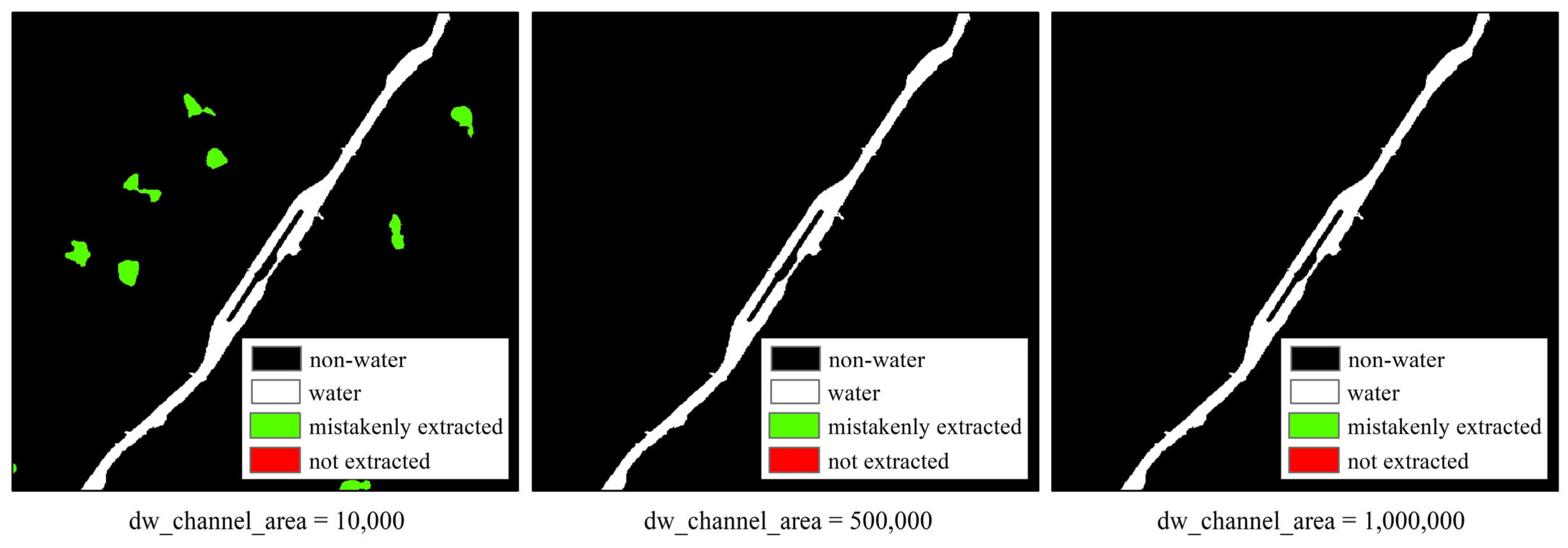
| dw_channel_area | Area threshold, used for shape area filtering to extract river areas. | Ship Lock 1 | 500,000 |
| Ship Lock 2 | 300,000 | ||
| Ship Lock 3 | 300,000 | ||
| Study Area | c Value | MAE | Run Time (s) |
|---|---|---|---|
| Ship Lock 1 | 2 | 0.491 | 91.052 |
| 3 | 0.246 | 81.329 | |
| 4 | 0.159 | 91.555 | |
| 5 | 0.130 | 113.037 | |
| 6 | 0.108 | 122.446 | |
| 7 | 0.099 | 112.803 | |
| 8 | 0.091 | 115.523 | |
| 9 | 0.091 | 120.173 | |
| Ship Lock 2 | 2 | 0.488 | 81.828 |
| 3 | 0.199 | 87.604 | |
| 4 | 0.106 | 82.235 | |
| 5 | 0.084 | 96.079 | |
| 6 | 0.066 | 83.930 | |
| 7 | 0.050 | 83.337 | |
| 8 | 0.050 | 95.168 | |
| 9 | 0.037 | 86.178 | |
| Ship Lock 3 | 2 | 0.329 | 98.623 |
| 3 | 0.183 | 87.674 | |
| 4 | 0.104 | 77.027 | |
| 5 | 0.062 | 81.076 | |
| 6 | 0.047 | 87.227 | |
| 7 | 0.038 | 85758 | |
| 8 | 0.030 | 100.219 | |
| 9 | 0.024 | 103.490 |
| Threshold Name | Description | Value | |
|---|---|---|---|
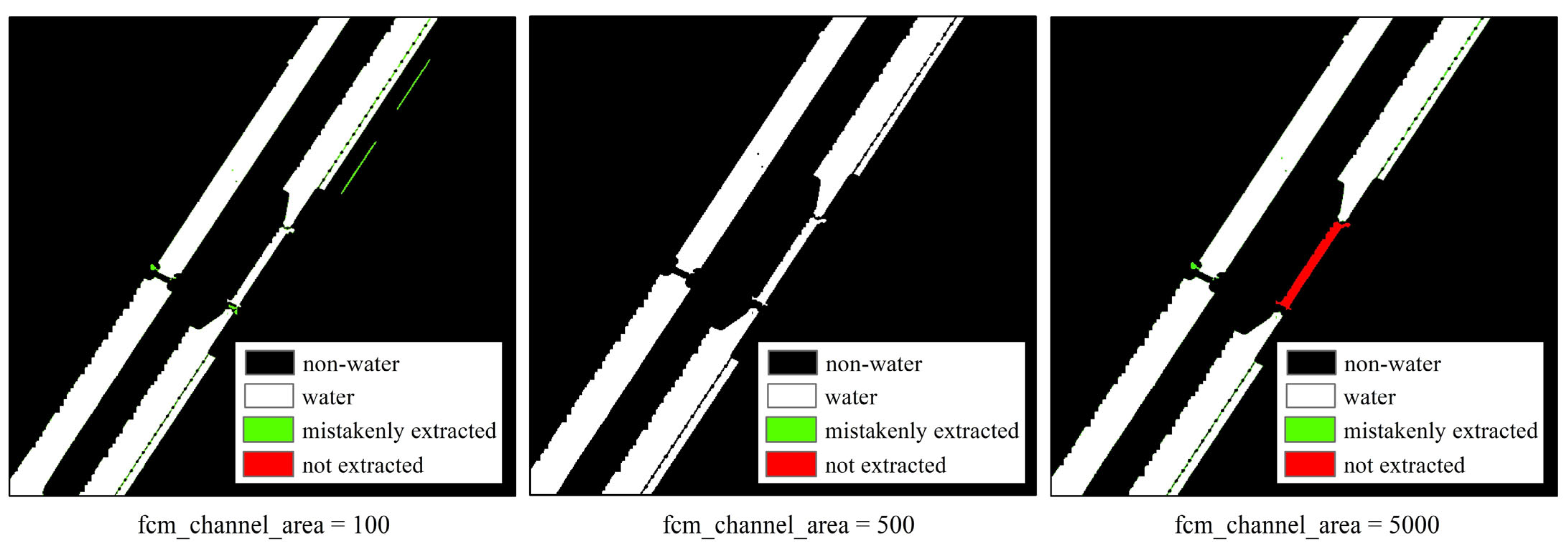
| fcm_channel_area | The first area threshold, used to filter the first shape area filter. | Ship Lock 1 | 500 |
| Ship Lock 2 | 1000 | ||
| Ship Lock 3 | 1000 | ||
| small_channel_thresh | The second area threshold, used for the second shape area screening and extraction gate chamber. | Ship Lock 1 | 600 |
| Ship Lock 2 | 2000 | ||
| Ship Lock 3 | 2000 | ||
| Study Area | mAP | mIoU |
|---|---|---|
| Ship Lock 1 | 0.784 | 0.740 |
| Ship Lock 2 | 0.833 | 0.713 |
| Ship Lock 3 | 0.810 | 0.782 |
| Average | 0.809 | 0.745 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, B.; Bao, Y.; Song, Y.; Li, Z.; Wang, Z.; Wang, X.; Ma, R.; Meng, L.; Zhang, W.; Li, L. Ship Lock Extraction from High-Resolution Remote Sensing Images Based on Fuzzy Theory and Prior Knowledge. Remote Sens. 2024, 16, 3181. https://doi.org/10.3390/rs16173181
Chen B, Bao Y, Song Y, Li Z, Wang Z, Wang X, Ma R, Meng L, Zhang W, Li L. Ship Lock Extraction from High-Resolution Remote Sensing Images Based on Fuzzy Theory and Prior Knowledge. Remote Sensing. 2024; 16(17):3181. https://doi.org/10.3390/rs16173181
Chicago/Turabian StyleChen, Bingsun, Yi Bao, Yanjiao Song, Ziyang Li, Zhe Wang, Xi Wang, Runsheng Ma, Lingkui Meng, Wen Zhang, and Linyi Li. 2024. "Ship Lock Extraction from High-Resolution Remote Sensing Images Based on Fuzzy Theory and Prior Knowledge" Remote Sensing 16, no. 17: 3181. https://doi.org/10.3390/rs16173181
APA StyleChen, B., Bao, Y., Song, Y., Li, Z., Wang, Z., Wang, X., Ma, R., Meng, L., Zhang, W., & Li, L. (2024). Ship Lock Extraction from High-Resolution Remote Sensing Images Based on Fuzzy Theory and Prior Knowledge. Remote Sensing, 16(17), 3181. https://doi.org/10.3390/rs16173181