

Design of a Near-Field Synthetic Aperture Radar Imaging System Based on Improved RMA

Abstract
:1. Introduction
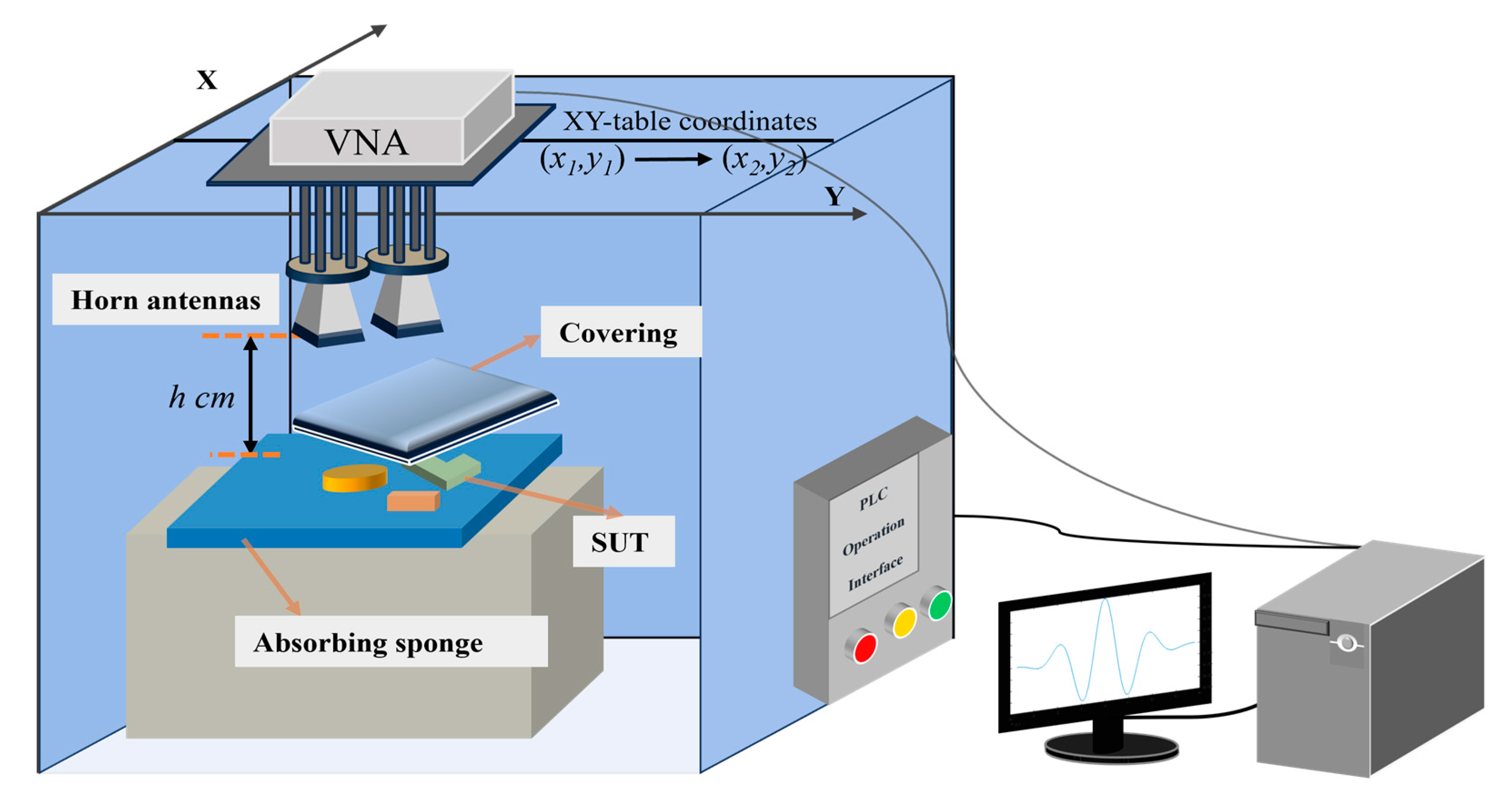
- A near-field SAR system is constructed using the VNA, a programmable logic controller (PLC), and horn antennas to image the covered object. The automatic data acquisition procedures are developed independently, which greatly reduced the data acquisition time. We also cascade the scanning and acquisition systems together. Only data acquisition is required for imaging; no separate reorganization and computation is needed. The scanning system can adaptively parameterize the scanning scene according to the quality of the image.
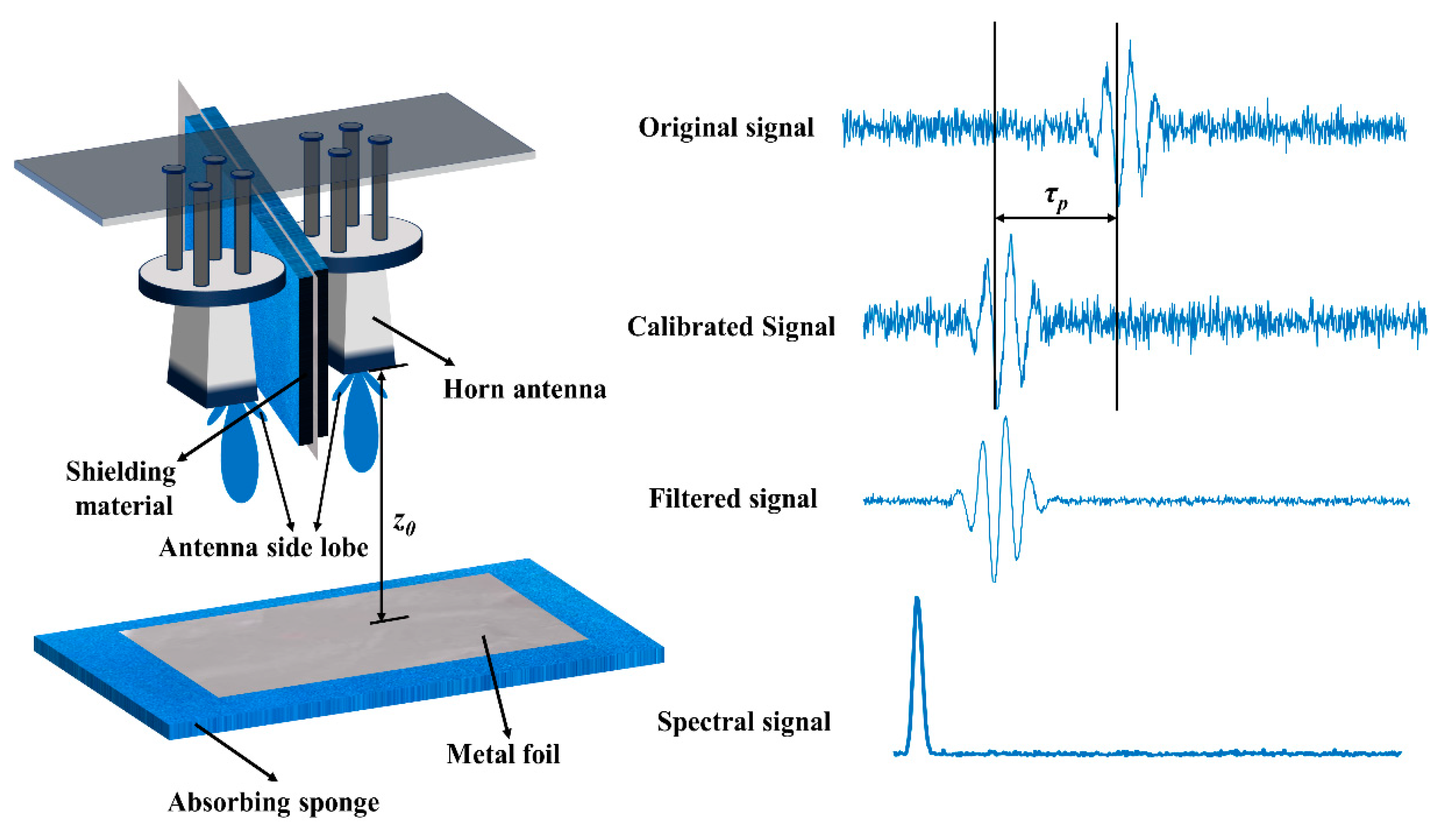
- To obtain more accurate data, isolated wave-absorbing materials and an optimized window are added to reduce interference. The results using the image evaluation metrics are adapted from a well-matched filter window. The enhancement of the imaging results by the above methods was verified through a series of experiments.
- Based on the traditional RMA algorithm, the compensation and interpolation are improved. A magnitude factor is introduced in the field of view to achieve distance enhancement. Phase correction for phase compensation is used to achieve a better imaging effect. The Stolt interpolation method is changed to improve the computing efficiency of the algorithm.
2. System Configuration
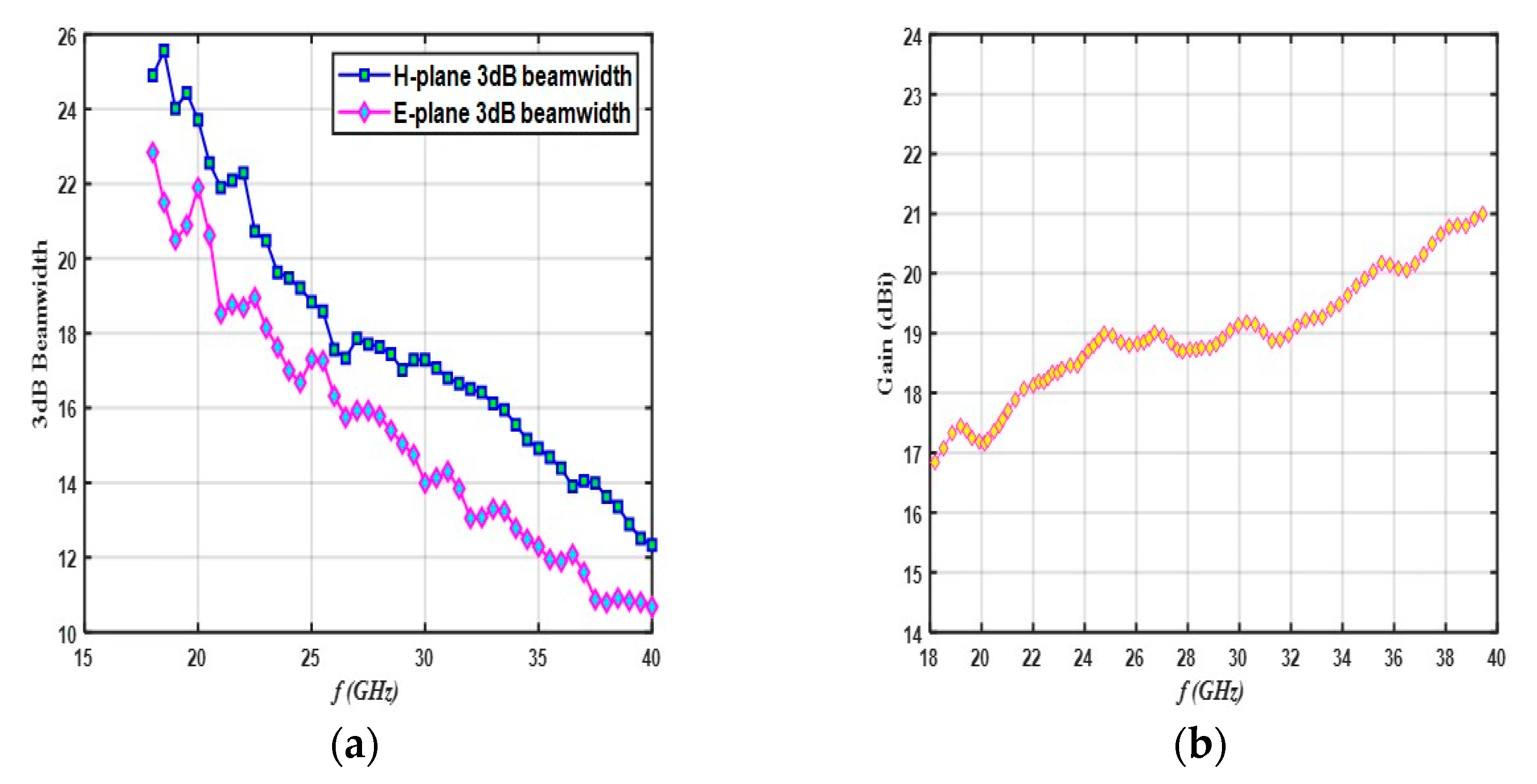
2.1. Description of the Antenna
2.2. System Structure
3. Imaging Methods
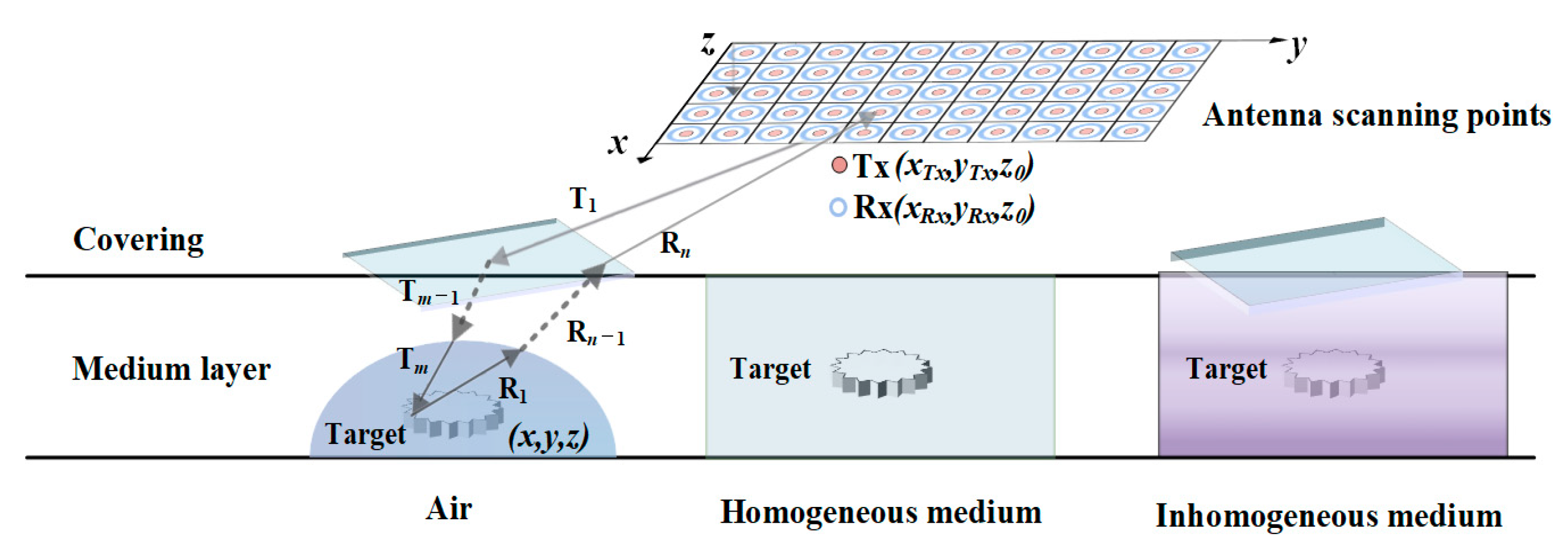
3.1. Signal Transmission Model
3.2. The Proposed Method
3.2.1. Design of Wave-Absorbing Materials
3.2.2. Clutter Suppression Using an Optimized Window
3.2.3. Interval Non-Uniform Interpolation Instead of Stolt Interpolation
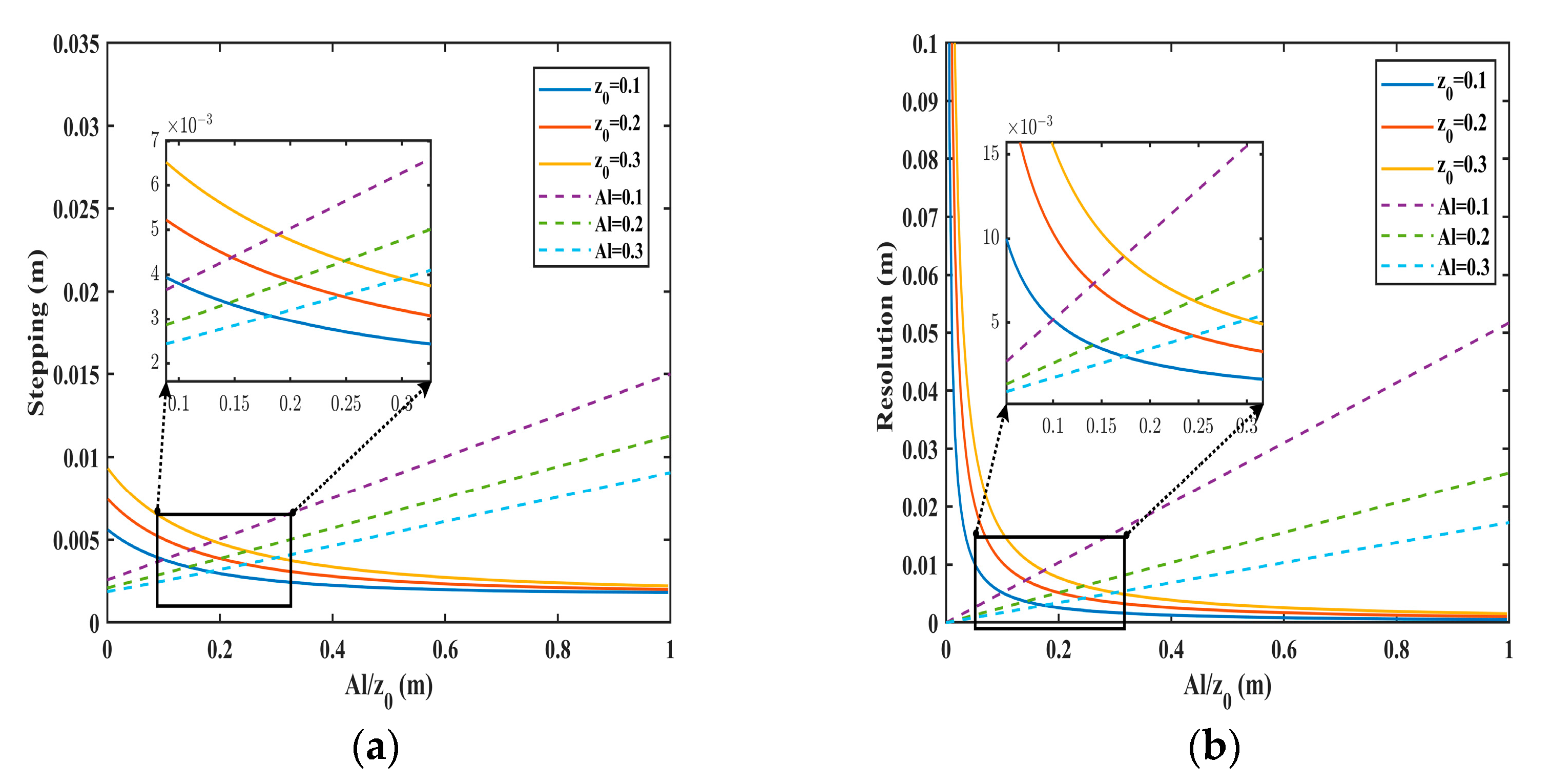
3.2.4. Implementation of Improved Distance Enhancement
3.2.5. Computational Complexity
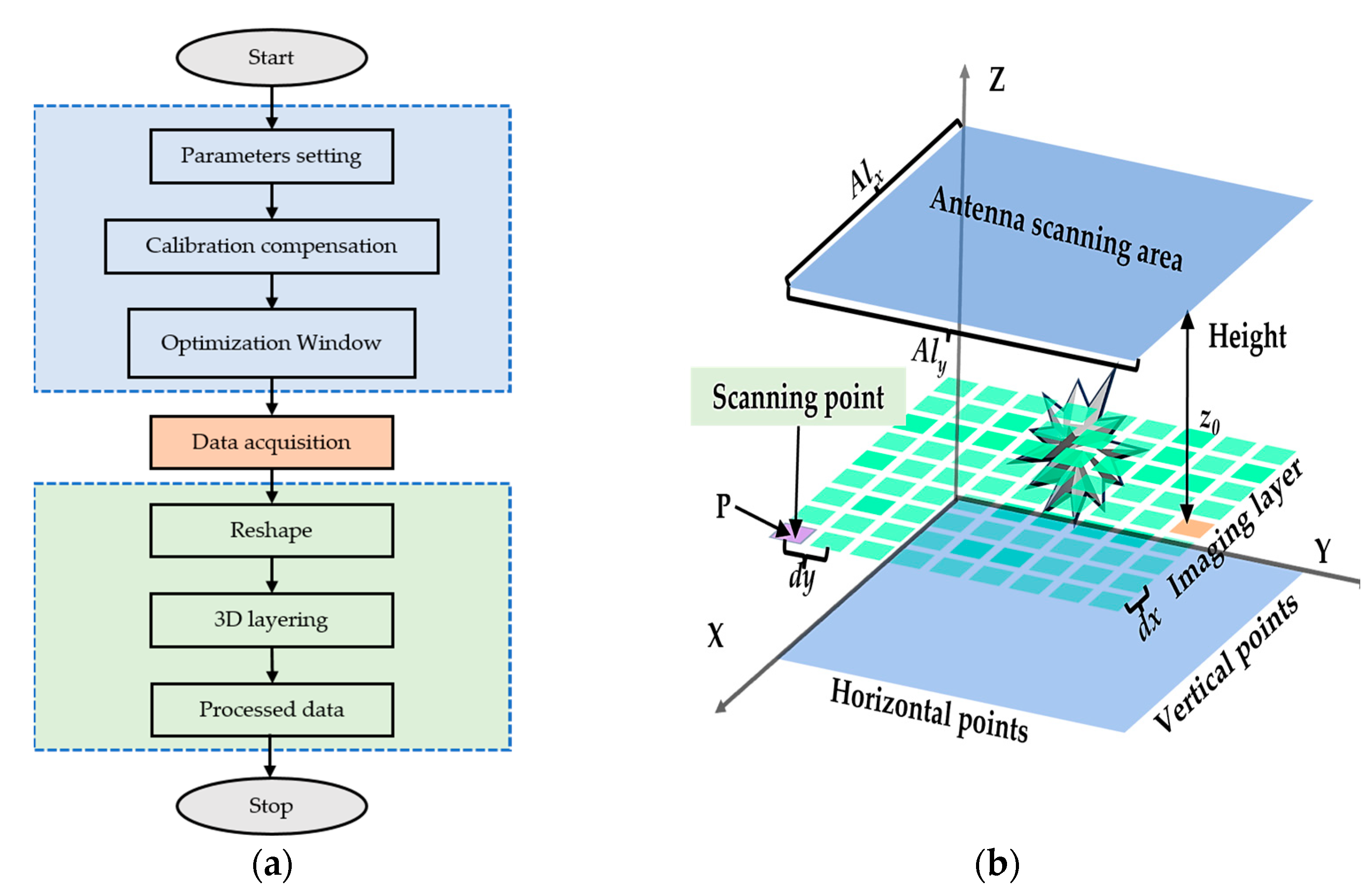
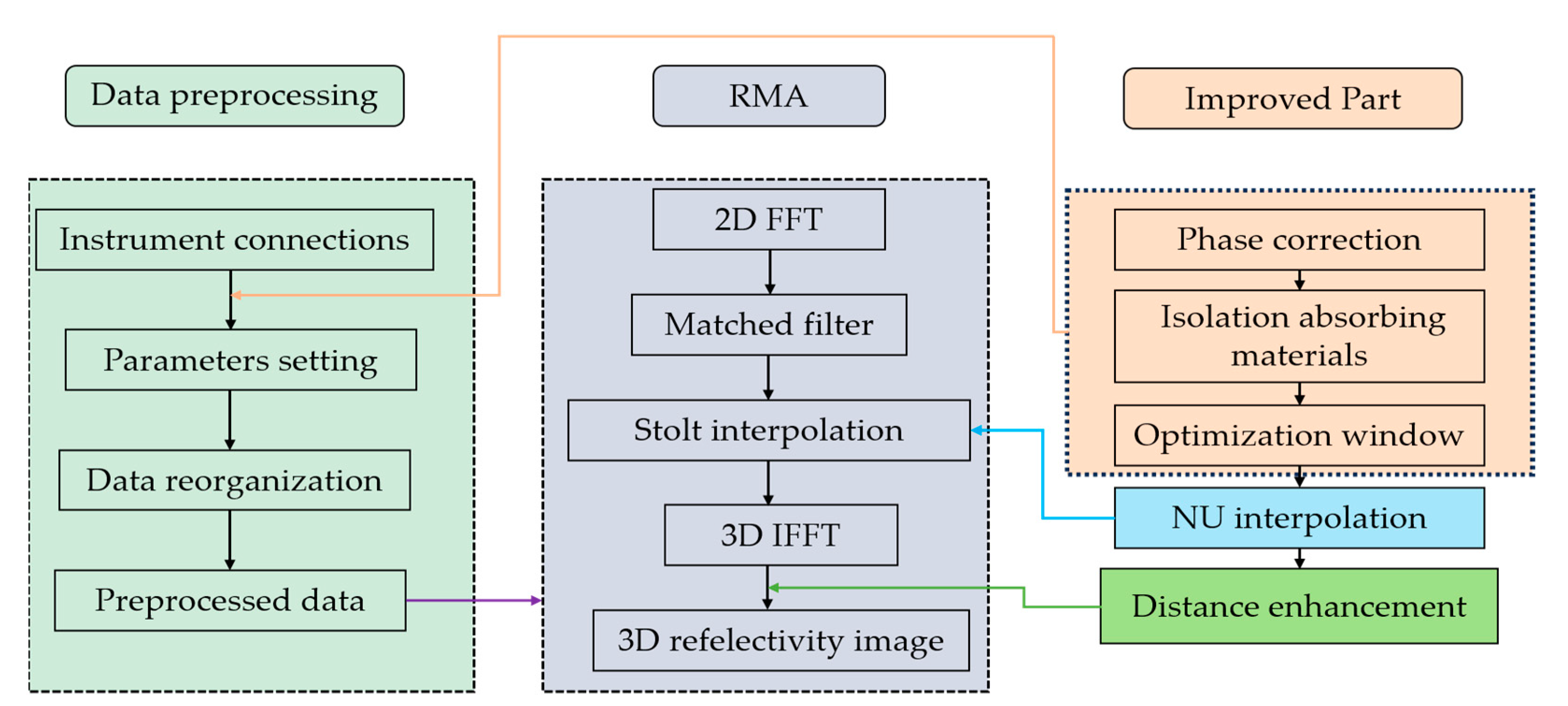
3.3. Data Preprocessing and Overall Algorithmic Procedures
4. Experiment and Result Analysis
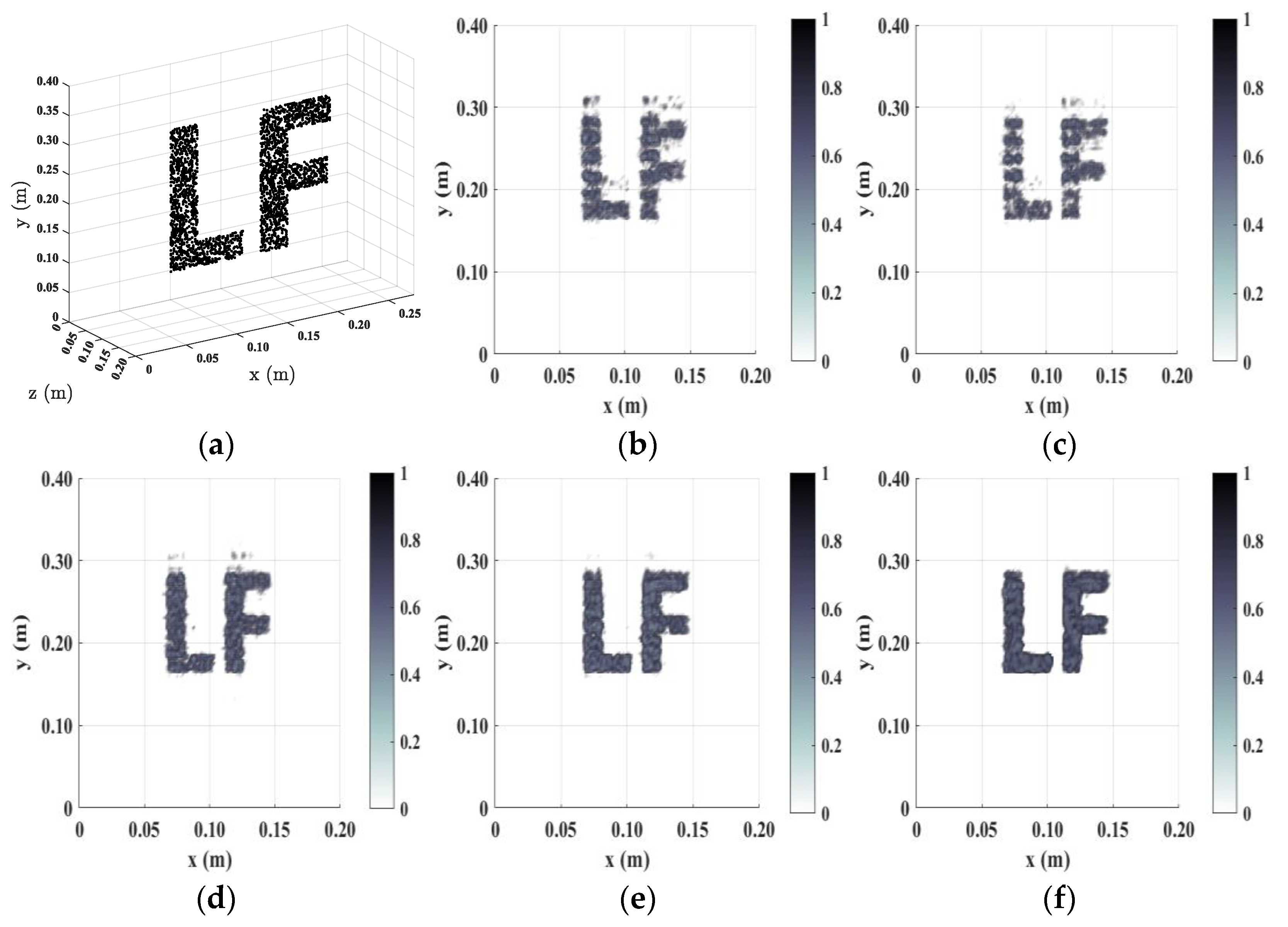
4.1. Numerical Simulation
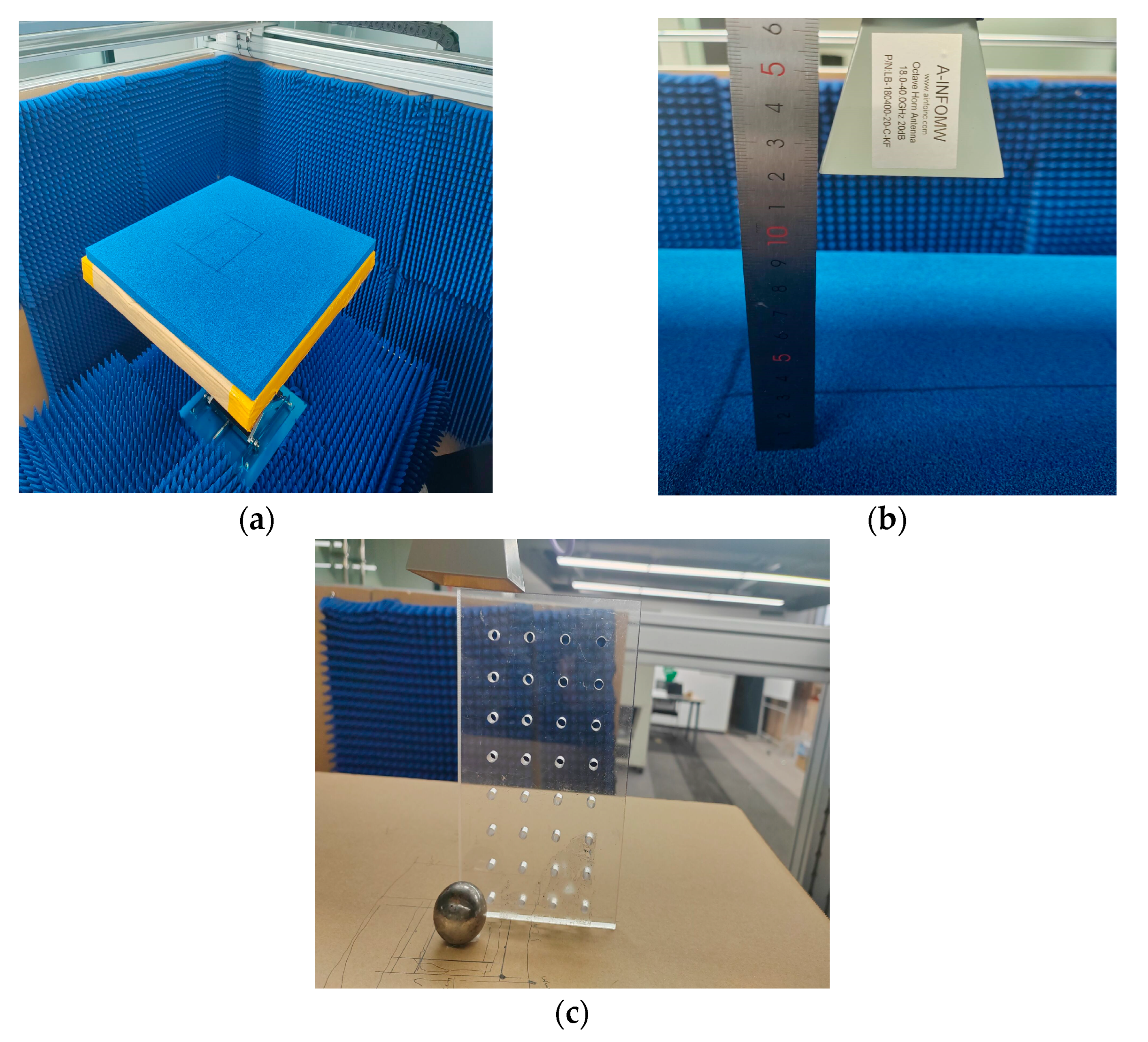
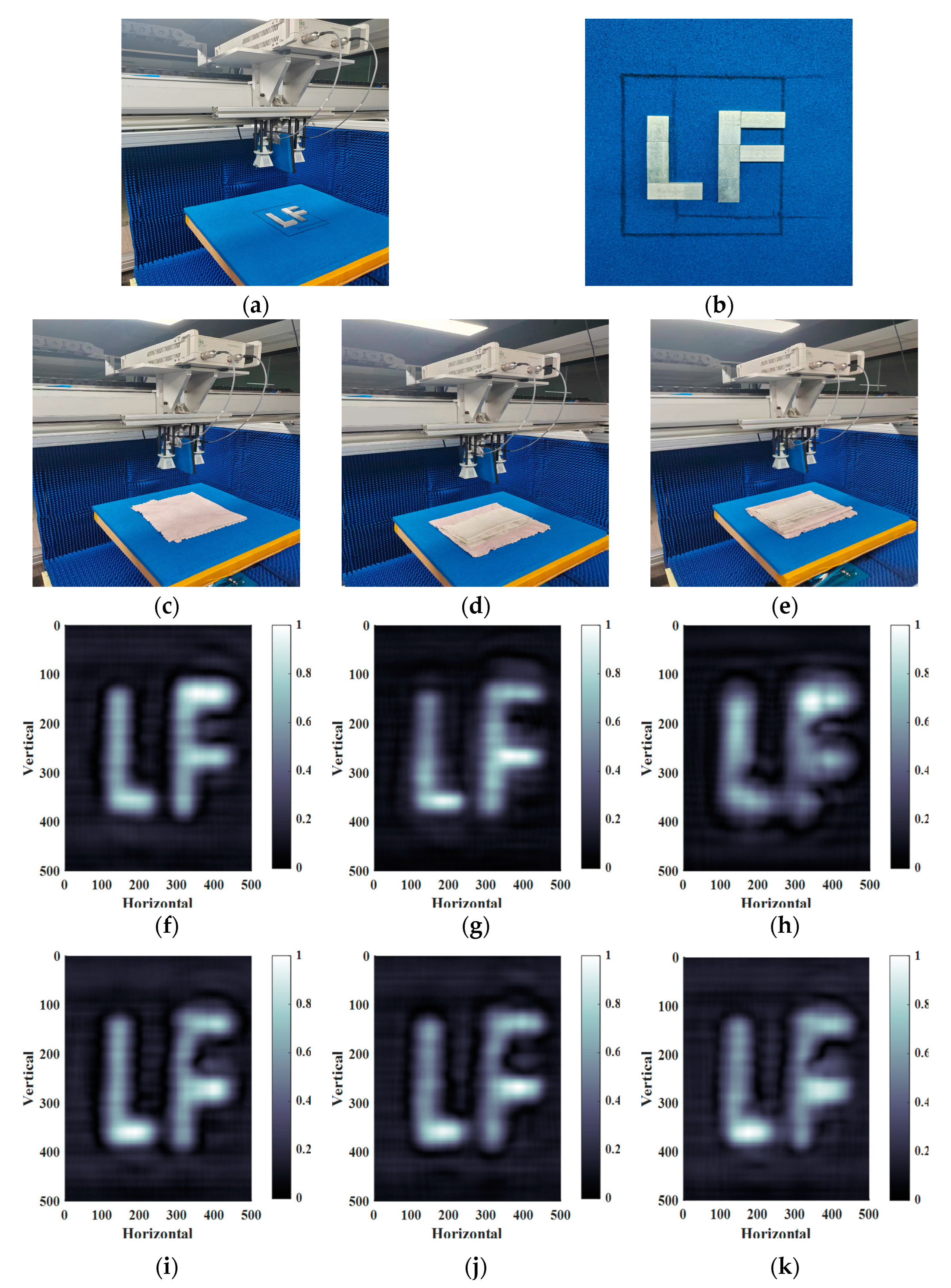
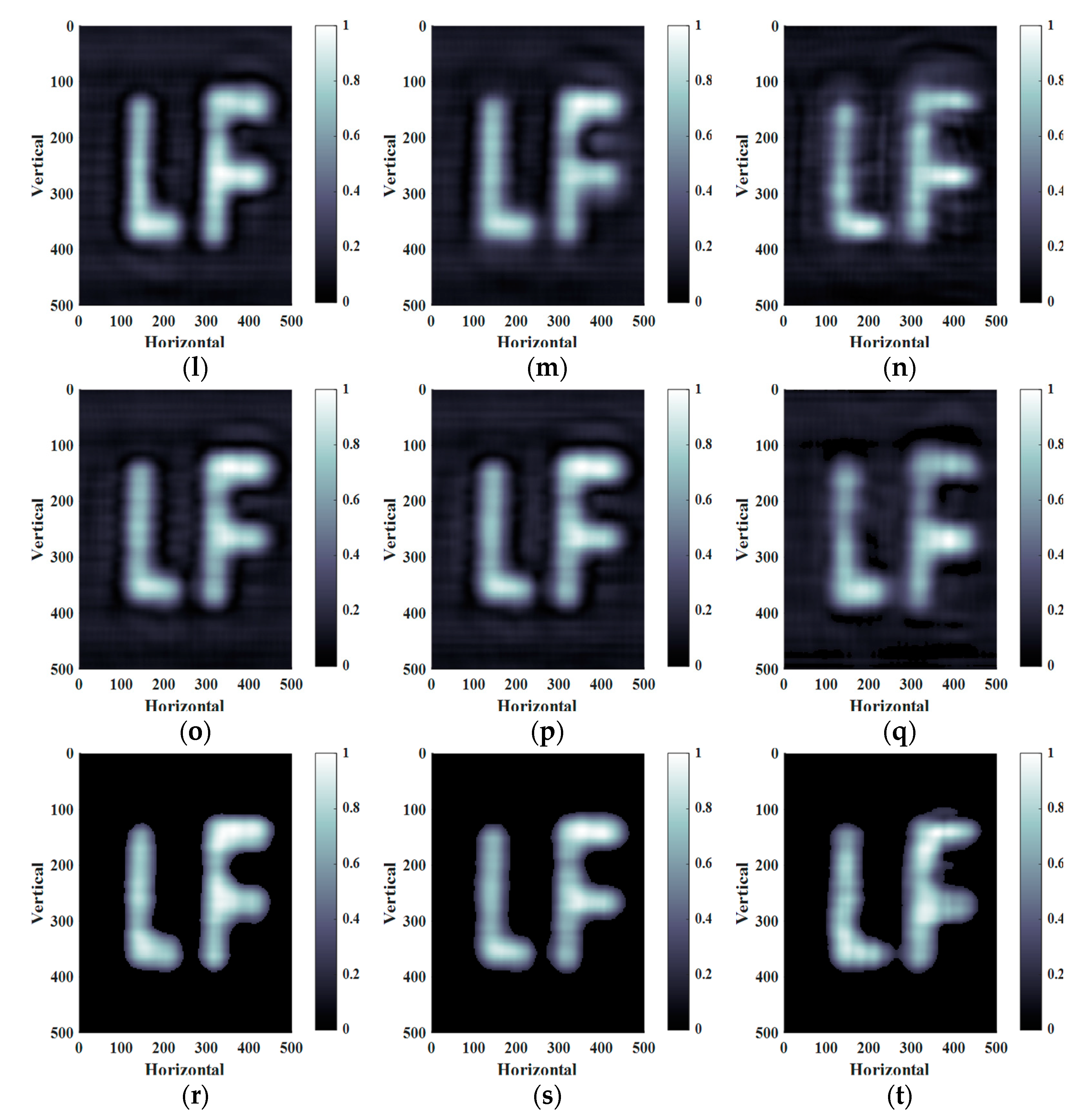
4.2. Experiments with Glyph Blocks with Coverings
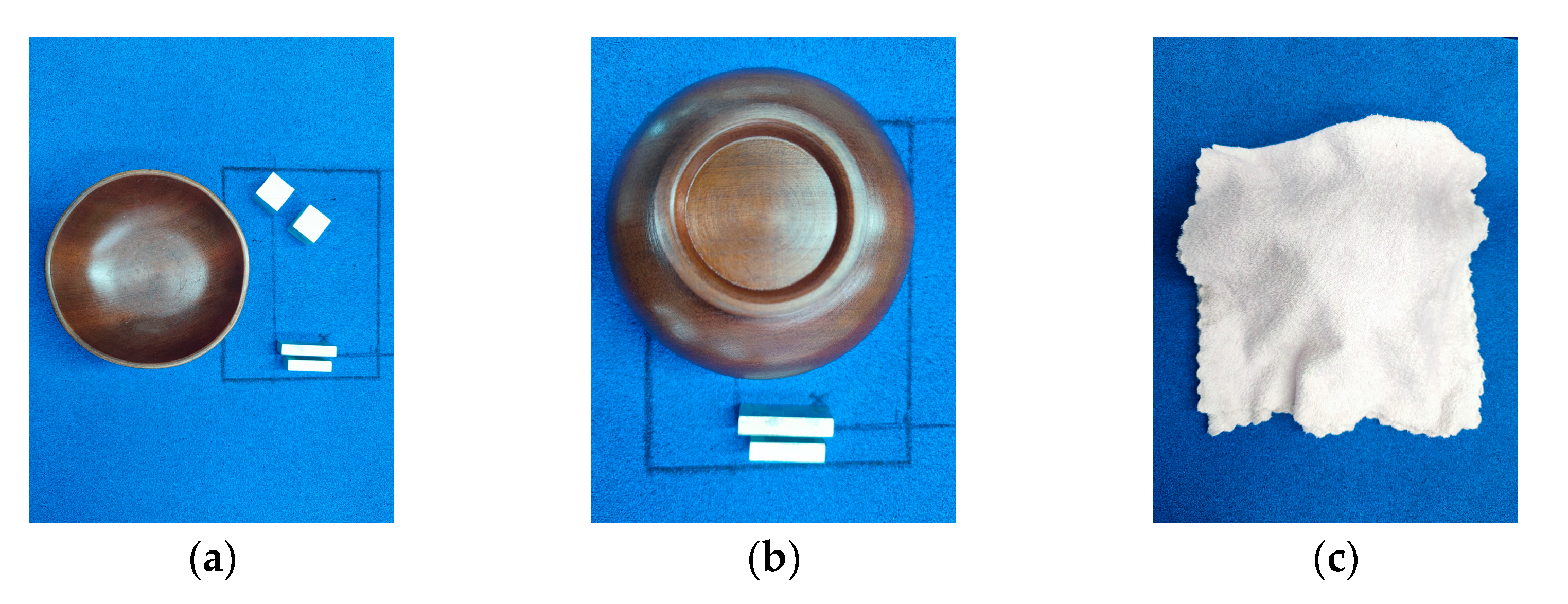
4.3. Experiments with Chunky Bowl Coverings
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, Q.; Xi, Q.; Zhu, C.; Zhang, B.; Wang, J.; Yu, H.; Li, Y.; Zhu, Z.; Li, X.; Ran, L. Microwave Imaging Enhanced by Duplexed Random Phase Modulations. IEEE Trans. Microw. Theory Tech. 2023, 71, 3144–3155. [Google Scholar] [CrossRef]
- Ahmed, S.S. Microwave Imaging in Security—Two Decades of Innovation. IEEE J. Microw. 2021, 1, 191–201. [Google Scholar] [CrossRef]
- Mirbeik-Sabzevari, A.; Oppelaar, E.; Ashinoff, R.; Tavassolian, N. High-Contrast, Low-Cost, 3-D Visualization of Skin Cancer Using Ultra-High-Resolution Millimeter-Wave Imaging. IEEE Trans. Med. Imaging 2019, 38, 2188–2197. [Google Scholar] [CrossRef] [PubMed]
- Wingren, N.; Sjoberg, D. Nondestructive Testing Using Mm-Wave Sparse Imaging Verified for Singly Curved Composite Panels. IEEE Trans. Antennas Propag. 2023, 71, 1185–1189. [Google Scholar] [CrossRef]
- Aljurbua, A.; Sarabandi, K. Detection and Localization of Buried Pipelines Using a 3-D Multistatic Imaging Radar. IEEE Trans. Geosci. Remote Sens. 2022, 60, 2003710. [Google Scholar] [CrossRef]
- Zhang, H.; Ouyang, S.; Wang, G.; Li, J.; Wu, S.; Zhang, F. Back-Projection Algorithm Based on Self-Correlation for Ground-Penetrating Radar Imaging. J. Appl. Remote Sens 2015, 9, 095059. [Google Scholar] [CrossRef]
- Lin, B.; Li, C.; Ji, Y.; Liu, X.; Fang, G. A Millimeter-Wave 3D Imaging Algorithm for MIMO Synthetic Aperture Radar. Sensors 2023, 23, 5979. [Google Scholar] [CrossRef]
- Peng, K.-C.; Lin, C.-C.; Li, C.-F.; Hung, C.-Y.; Hsieh, Y.-S. A Compact 9 GHz Microwave Imaging System. In Proceedings of the 2018 IEEE International Workshop on Electromagnetics:Applications and Student Innovation Competition (iWEM), Nagoya, Japan, 29–31 August 2018; p. 1. [Google Scholar]
- Fang, Y.; Bakian-Dogaheh, K.; Moghaddam, M. Real-Time 3D Microwave Medical Imaging with Enhanced Variational Born Iterative Method. IEEE Trans. Med. Imaging 2023, 42, 268–280. [Google Scholar] [CrossRef]
- Ren, K.; Wang, Q.; Burkholder, R.J. A Fast Back-Projection Approach to Diffraction Tomography for Near-Field Microwave Imaging. IEEE Antennas Wirel. Propag. Lett. 2019, 18, 2170–2174. [Google Scholar] [CrossRef]
- Xia, Y.; Song, Z.; Lu, Z.; Fu, Q. A Novel Range-Doppler Imaging Algorithm with OFDM Radar. Chin. J. Aeronaut. 2016, 29, 492–501. [Google Scholar] [CrossRef]
- An, D.; Huang, X.; Jin, T.; Zhou, Z. Extended Nonlinear Chirp Scaling Algorithm for High-Resolution Highly Squint SAR Data Focusing. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3595–3609. [Google Scholar] [CrossRef]
- Cafforio, C.; Prati, C.; Rocca, F. SAR Data Focusing Using Seismic Migration Techniques. IEEE Trans. Aerosp. Electron. Syst. 1991, 27, 194–207. [Google Scholar] [CrossRef]
- Lopez-Sahcnez, J.M.; Fortuny-Guasch, J. 3-D Radar Imaging Using Range Migration Techniques. IEEE Trans. Antennas Propag. 2000, 48, 728–737. [Google Scholar] [CrossRef]
- Peng, K.-C.; Lin, C.-C.; Li, C.-F.; Hung, C.-Y.; Hsieh, Y.-S.; Chen, C.-C. A Compact X-Band Vector Network Analyzer for Microwave Image Sensing. IEEE Sens. J. 2019, 19, 3304–3313. [Google Scholar] [CrossRef]
- Shumakov, D.S.; Beaverstone, A.S.; Nikolova, N.K. De-Noising Algorithm for Enhancing Microwave Imaging. J. Eng. 2017, 2017, 72–76. [Google Scholar] [CrossRef]
- Chen, C.; He, Z.; Song, X.; Liu, T.; Su, Y. A Subspace Projection Approach for Clutter Mitigation in Holographic Subsurface Imaging. IEEE Geosci. Remote Sens. Lett. 2022, 19, 8013505. [Google Scholar] [CrossRef]
- Yu, J.; Ka, M.-H. Precision Near-Field Reconstruction in the Time Domain via Minimum Entropy for Ultra-High Resolution Radar Imaging. Remote Sens. 2017, 9, 449. [Google Scholar] [CrossRef]
- Wang, Z.; Guo, Q.; Tian, X.; Chang, T.; Cui, H.-L. Near-Field 3-D Millimeter-Wave Imaging Using MIMO RMA with Range Compensation. IEEE Trans. Microw. Theory Tech. 2019, 67, 1157–1166. [Google Scholar] [CrossRef]
- Wang, Z.; Tian, X.; Chang, T.; Cui, H.-L. Phase-Based Range-Enhanced Millimeter-Wave Imaging Technique for Multistatic Planar Array. IEEE Trans. Microw. Theory Tech. 2022, 70, 1882–1895. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, D.; Geng, R.; Lu, Z.; Wu, Z.; Hu, Y.; Sun, Q.; Chen, Y. A High-Resolution Handheld Millimeter-Wave Imaging System with Phase Error Estimation and Compensation. Commun. Eng. 2024, 3, 4. [Google Scholar] [CrossRef]
- Fromenteze, T.; Yurduseven, O.; Berland, F.; Decroze, C.; Smith, D.R.; Yarovoy, A.G. A Transverse Spectrum Deconvolution Technique for MIMO Short-Range Fourier Imaging. IEEE Trans. Geosci. Remote Sens. 2019, 57, 6311–6324. [Google Scholar] [CrossRef]
- Guo, Q.; Liang, J.; Chang, T.; Cui, H.-L. Millimeter-Wave Imaging with Accelerated Super-Resolution Range Migration Algorithm. IEEE Trans. Microw. Theory Tech. 2019, 67, 4610–4621. [Google Scholar] [CrossRef]
- Meng, Y.; Lin, C.; Qing, A.; Nikolova, N.K. Accelerated Holographic Imaging With Range Stacking for Linear Frequency Modulation Radar. IEEE Trans. Microw. Theory Tech. 2022, 70, 1630–1638. [Google Scholar] [CrossRef]
- Abbasi, M.; Shayei, A.; Shabany, M.; Kavehvash, Z. Fast Fourier-Based Implementation of Synthetic Aperture Radar Algorithm for Multistatic Imaging System. IEEE Trans. Instrum. Meas. 2019, 68, 3339–3349. [Google Scholar] [CrossRef]
- Zamani, H.; Fakharzadeh, M. 1.5-D Sparse Array for Millimeter-Wave Imaging Based on Compressive Sensing Techniques. IEEE Trans. Antennas Propag. 2018, 66, 2008–2015. [Google Scholar] [CrossRef]
- Fan, B.; Gao, J.-K.; Li, H.-J.; Jiang, Z.-J.; He, Y. Near-Field 3D SAR Imaging Using a Scanning Linear MIMO Array with Arbitrary Topologies. IEEE Access 2020, 8, 6782–6791. [Google Scholar] [CrossRef]
- Smith, J.W.; Torlak, M. Efficient 3-D Near-Field MIMO-SAR Imaging for Irregular Scanning Geometries. IEEE Access 2022, 10, 10283–10294. [Google Scholar] [CrossRef]
- Pramudita, A.A.; Praktika, T.O.; Jannah, S. Radar Modeling Experiment Using Vector Network Analyzer. In Proceedings of the 2020 International Symposium on Antennas and Propagation (ISAP), Osaka, Japan, 25 January 2021; pp. 99–100. [Google Scholar]
- Burki, J.; Ali, T.; Arshad, S. Vector Network Analyzer (VNA) Based Synthetic Aperture Radar (SAR) Imaging. In Proceedings of the INMIC, Lahore, Pakistan, 19–20 December 2013; pp. 207–212. [Google Scholar]
- Hu, S.; Molaei, A.M.; Yurduseven, O.; Meng, H.; Nilavalan, R.; Gan, L.; Chen, X. Multistatic MIMO Sparse Imaging Based on FFT and Low-Rank Matrix Recovery Techniques. IEEE Trans. Microw. Theory Tech. 2023, 71, 1285–1295. [Google Scholar] [CrossRef]
- Bao, G.; Li, P. Inverse Medium Scattering Problems for Electromagnetic Waves. SIAM J. Appl. Math. 2005, 65, 2049–2066. [Google Scholar] [CrossRef]
- Fante, R. Transmission of Electromagnetic Waves into Time-Varying Media. IEEE Trans. Antennas Propag. 1971, 19, 417–424. [Google Scholar] [CrossRef]
- Zhu, R.; Zhou, J.; Jiang, G.; Fu, Q. Range Migration Algorithm for Near-Field MIMO-SAR Imaging. IEEE Geosci. Remote Sens. Lett. 2017, 14, 2280–2284. [Google Scholar] [CrossRef]
- Sheen, D.M.; McMakin, D.L.; Hall, T.E. Three-Dimensional Millimeter-Wave Imaging for Concealed Weapon Detection. IEEE Trans. Microw. Theory Tech. 2001, 49, 1581–1592. [Google Scholar] [CrossRef]
- Zhuge, X.; Yarovoy, A.G. Three-Dimensional Near-Field MIMO Array Imaging Using Range Migration Techniques. IEEE Trans. Image Process. 2012, 21, 3026–3033. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Liu, X. SAR Minimum-Entropy Autofocus Using an Adaptive-Order Polynomial Model. IEEE Geosci. Remote Sens. Lett. 2006, 3, 512–516. [Google Scholar] [CrossRef]
- Papoulis, A. Systems and Transforms with Applications in Optics; McGraw-Hill series in systems science; McGraw-Hill: New York, NY, USA, 1968. [Google Scholar]
- Qiao, L.; Wang, Y.; Zhao, Z.; Chen, Z. Exact Reconstruction for Near-Field Three-Dimensional Planar Millimeter-Wave Holographic Imaging. J. Infrared Millim. Terahertz Waves 2015, 36, 1221–1236. [Google Scholar] [CrossRef]
- Owda, A.Y.; Owda, M.; Rezgui, N.-D. Synthetic Aperture Radar Imaging for Burn Wounds Diagnostics. Sensors 2020, 20, 847. [Google Scholar] [CrossRef]
- Yang, G.; Li, C.; Wu, S.; Liu, X.; Fang, G. MIMO-SAR 3-D Imaging Based on Range Wavenumber Decomposing. IEEE Sens. J. 2021, 21, 24309–24317. [Google Scholar] [CrossRef]
- Manzoor, Z.; Qaseer, M.T.A.; Donnell, K.M. A Comprehensive Bi-Static Amplitude Compensated Range Migration Algorithm (AC-RMA). IEEE Trans. Image Process. 2021, 30, 7038–7049. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Processing Steps | Computational Complexity |
|---|---|
| Data reorganization | Nf Nmin |
| 2D FFT | O (Nx Ny Nf log2 (Nx Ny)) |
| Interval non-uniform interpolation | O (Nx Ny Nz) |
| 3D IFFT | O (Nx Ny Nz log2 (Nx Ny)) |
| Summation along z | Nz |
| Parameters | Value |
|---|---|
| Center frequency | 33 GHz |
| Frequency bandwidth | 14 GHz |
| X aperture length | 0.20 m |
| Y aperture length | 0.20 m |
| Frequency points | 201 |
| Step size along X-axis | 3 mm |
| Step size along Y-axis | 3 mm |
| Number of transmitting antennas | 2 |
| Number of receiving antennas | 4 |
| Distance of the antenna from the target | 0.15 m |
| Parameters | Value |
|---|---|
| Center frequency | 22 GHz |
| Frequency bandwidth | 8 GHz |
| X aperture length | 0.20 m |
| Y aperture length | 0.20 m |
| Frequency points | 101 |
| Step size along X-axis | 5 mm |
| Step size along Y-axis | 5 mm |
| Target height | 0.20 m |
| Double Layer of Fabric | Multilayer Fabric | Extra Thick Layers of Fabric | Time | ||||
|---|---|---|---|---|---|---|---|
| PSNR | IE | PSNR | IE | PSNR | IE | ||
| RMA | 10.7418 | 5.4109 | 10.3217 | 5.4263 | 9.8614 | 5.4375 | 1.1710 |
| BP | 10.6581 | 5.3892 | 10.4362 | 5.4124 | 10.0537 | 5.4520 | 1762 |
| HIA | 12.3204 | 4.4232 | 11.1658 | 4.4622 | 10.1825 | 4.5405 | 0.5864 |
| AC-RMA | 12.8693 | 4.2841 | 13.6827 | 4.4064 | 10.2476 | 4.4302 | 1.4052 |
| Proposed | 14.6957 | 3.2497 | 14.0406 | 3.3316 | 13.0477 | 3.3929 | 0.6275 |
| PSNR | IE | Time | |
|---|---|---|---|
| RMA | 12.4308 | 3.4449 | 4.3000 |
| BP | 12.0358 | 3.4807 | 2568 |
| HIA | 11.5869 | 3.3032 | 2.0522 |
| AC-RMA | 13.4572 | 3.3607 | 5.1600 |
| Proposed | 14.6263 | 3.2320 | 2.2000 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Xu, H.; Xu, J.; Chen, H.; An, Q.; Hou, K.; Wang, J. Design of a Near-Field Synthetic Aperture Radar Imaging System Based on Improved RMA. Remote Sens. 2024, 16, 3342. https://doi.org/10.3390/rs16173342
Li Y, Xu H, Xu J, Chen H, An Q, Hou K, Wang J. Design of a Near-Field Synthetic Aperture Radar Imaging System Based on Improved RMA. Remote Sensing. 2024; 16(17):3342. https://doi.org/10.3390/rs16173342
Chicago/Turabian StyleLi, Yongcheng, Huaqiang Xu, Jiawei Xu, Hao Chen, Qiying An, Kangming Hou, and Jingjing Wang. 2024. "Design of a Near-Field Synthetic Aperture Radar Imaging System Based on Improved RMA" Remote Sensing 16, no. 17: 3342. https://doi.org/10.3390/rs16173342