
Ship Contour Extraction from Polarimetric SAR Images Based on Polarization Modulation


Abstract
:1. Introduction
- (1)
- This paper introduces a novel method for enhancing PolSAR images with polarization modulation, offering a new perspective on the utilization of polarization information.
- (2)
- A method for extracting ship contours from PolSAR images is presented. We establish a comprehensive contour extraction process that includes image pre-segmentation, optimization of polarization modulation, and the ROEWA edge detector with adaptive clustering.
- (3)
- We build a ground-truth dataset for ship contour extraction in PolSAR images. Extensive experimental validation has been conducted, demonstrating the robustness and effectiveness of our method in ship contour extraction and geometric feature extraction.
2. PolSAR Image Modulation and Uniformity Enhancement
2.1. The Fundamentals of PolSAR Image Modulation
2.2. Limitations of Optimization with Finite Polarization
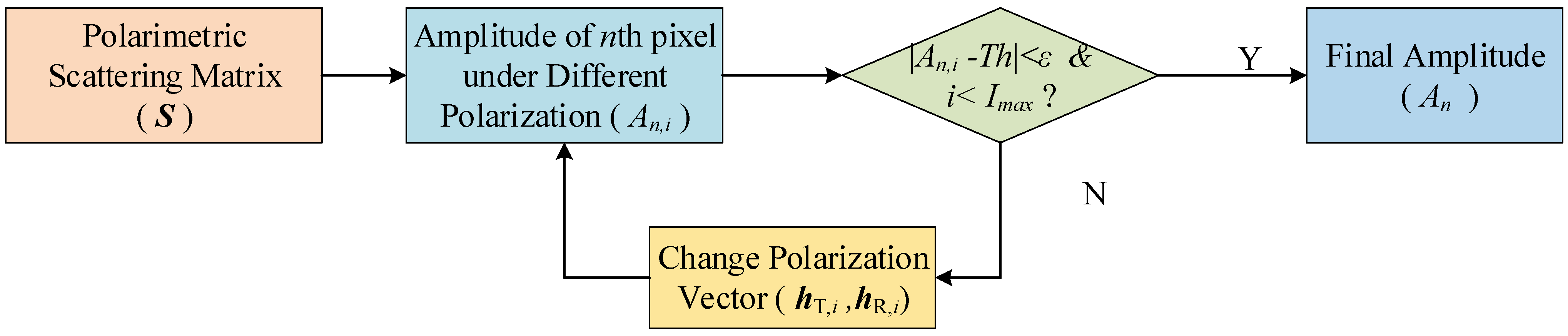
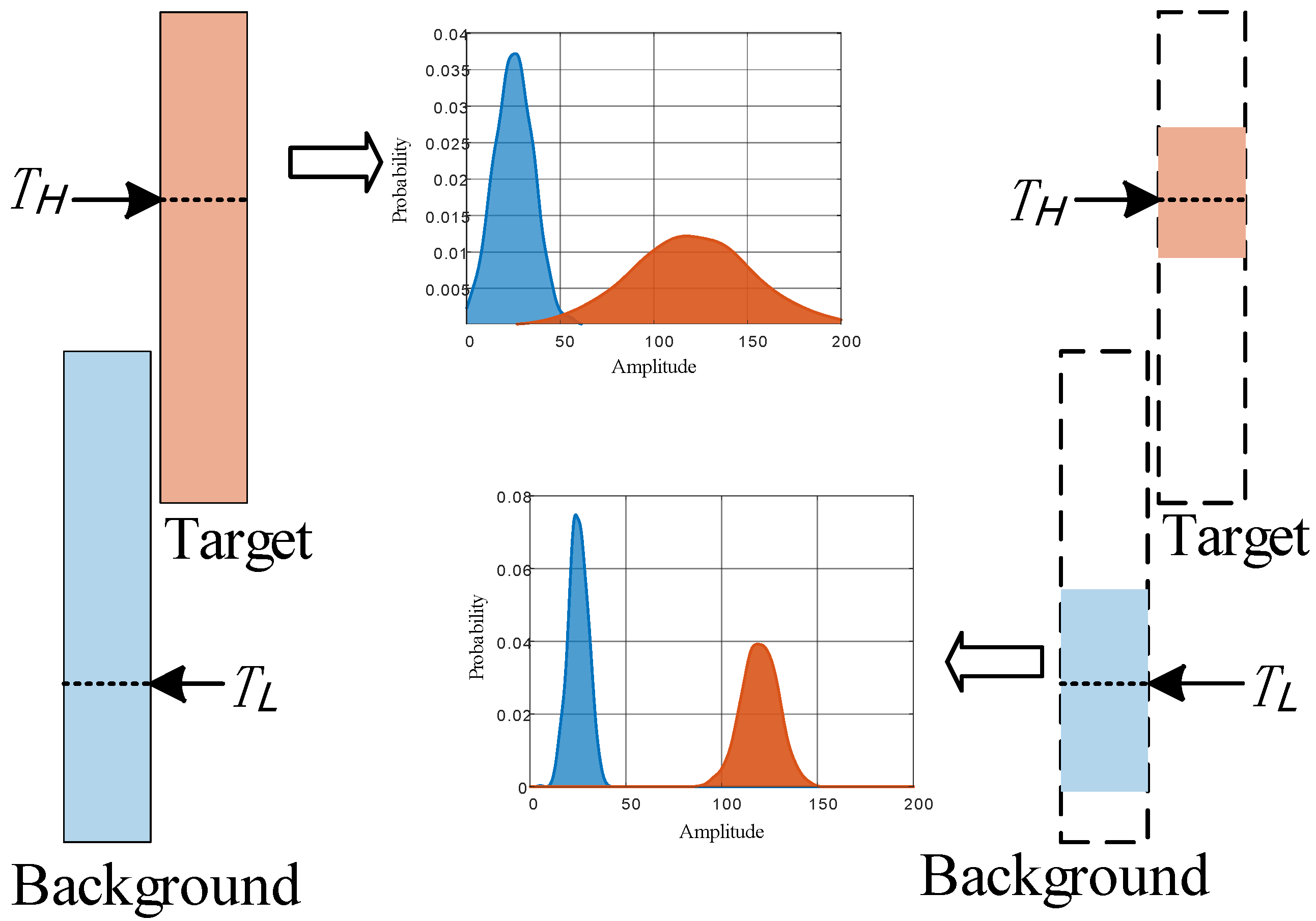
2.3. Amplitude Approximation Strategy Based on Polarization Modulation
3. Ship Contour Extraction Method from PolSAR Images
3.1. Image Pre-Segmentation Based on Super-Pixel Unsupervised Clustering
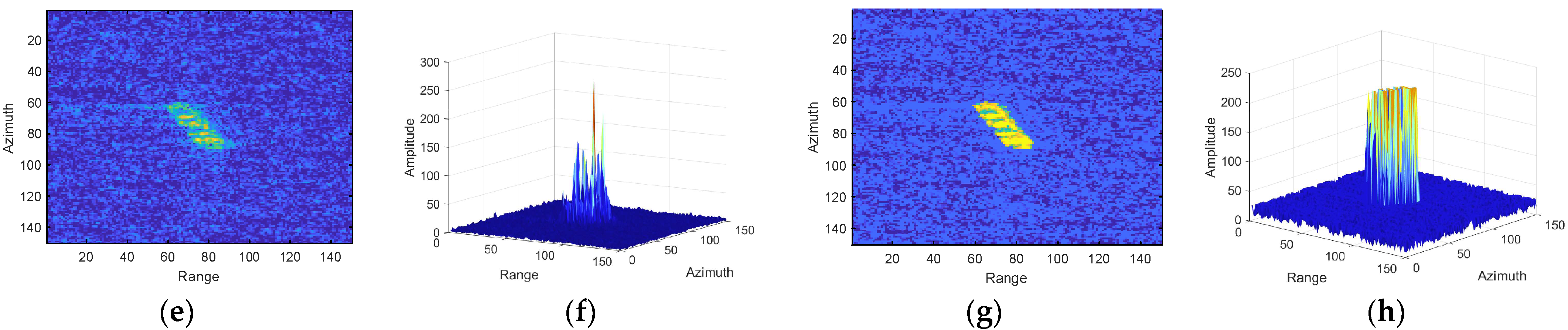
3.2. Image Optimization Based on Polarization Modulation
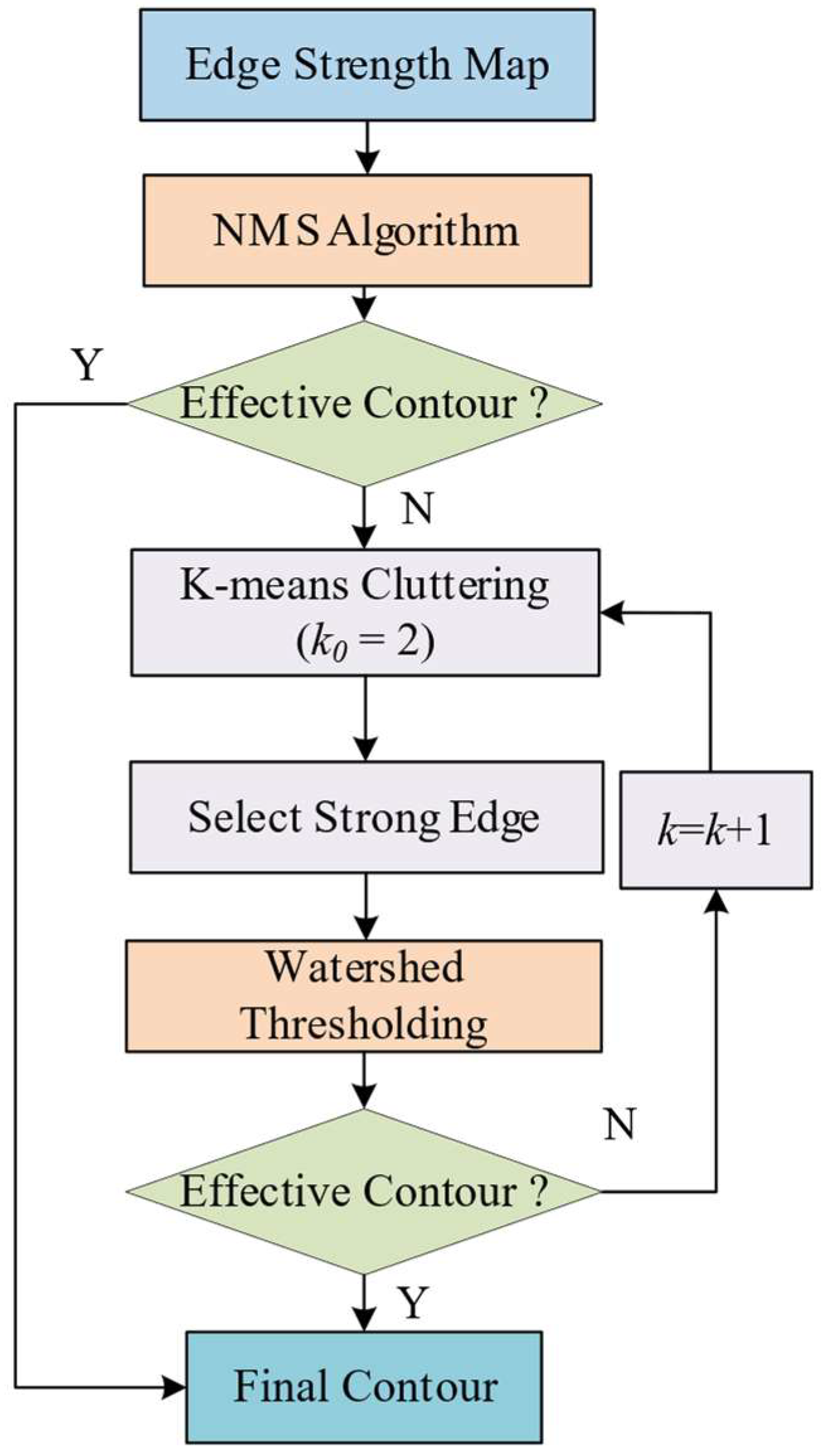
3.3. Edge Extraction Based on ROEWA Detector and Adaptive Clustering
3.4. Evaluation of Contour Extraction
3.5. Extraction of Geometric Features
4. Experimental Results and Performance Analysis
4.1. Dataset
4.2. Performance Analysis of Contour Extraction
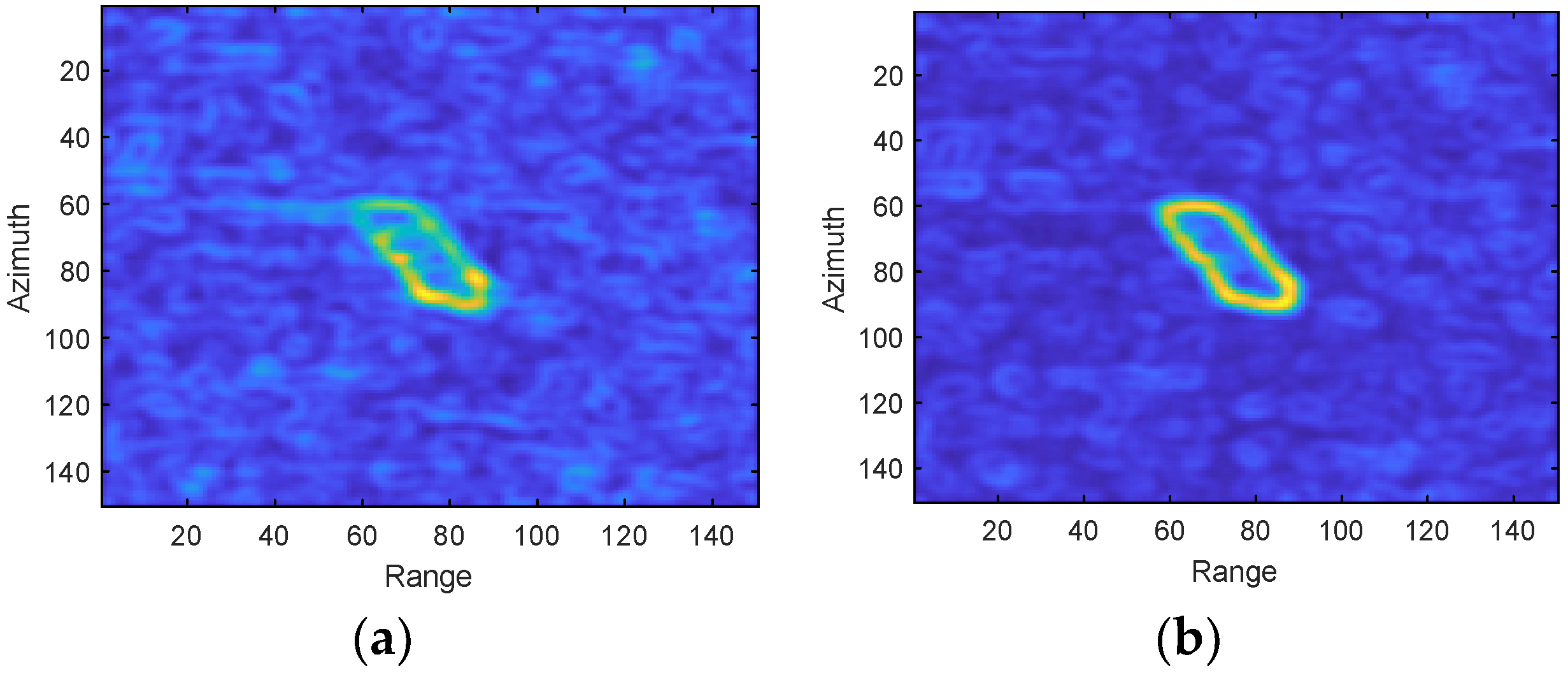
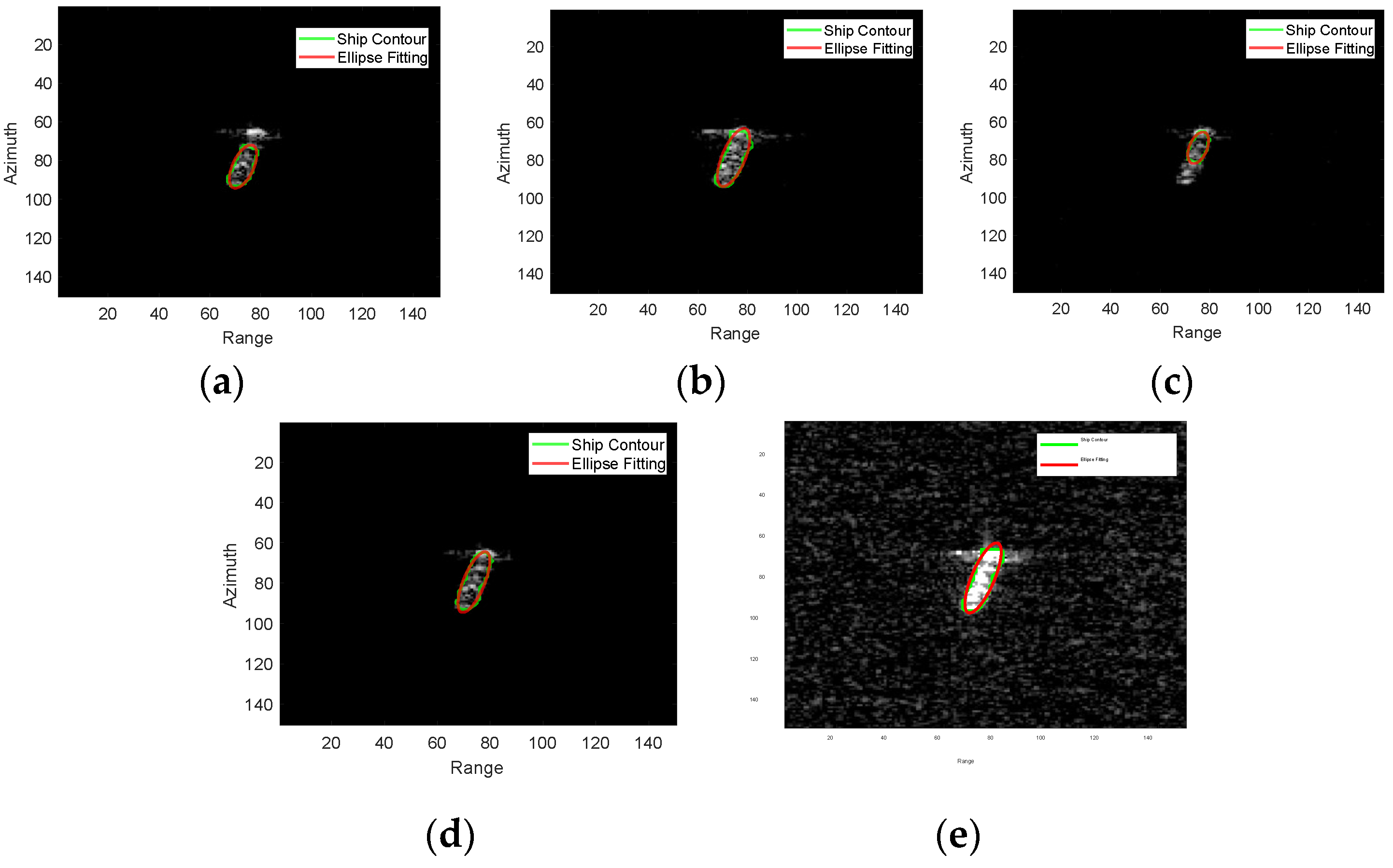
4.2.1. Contour Extraction of Specific Scenes
- Single-target scene
- b.
- Multi-target scene
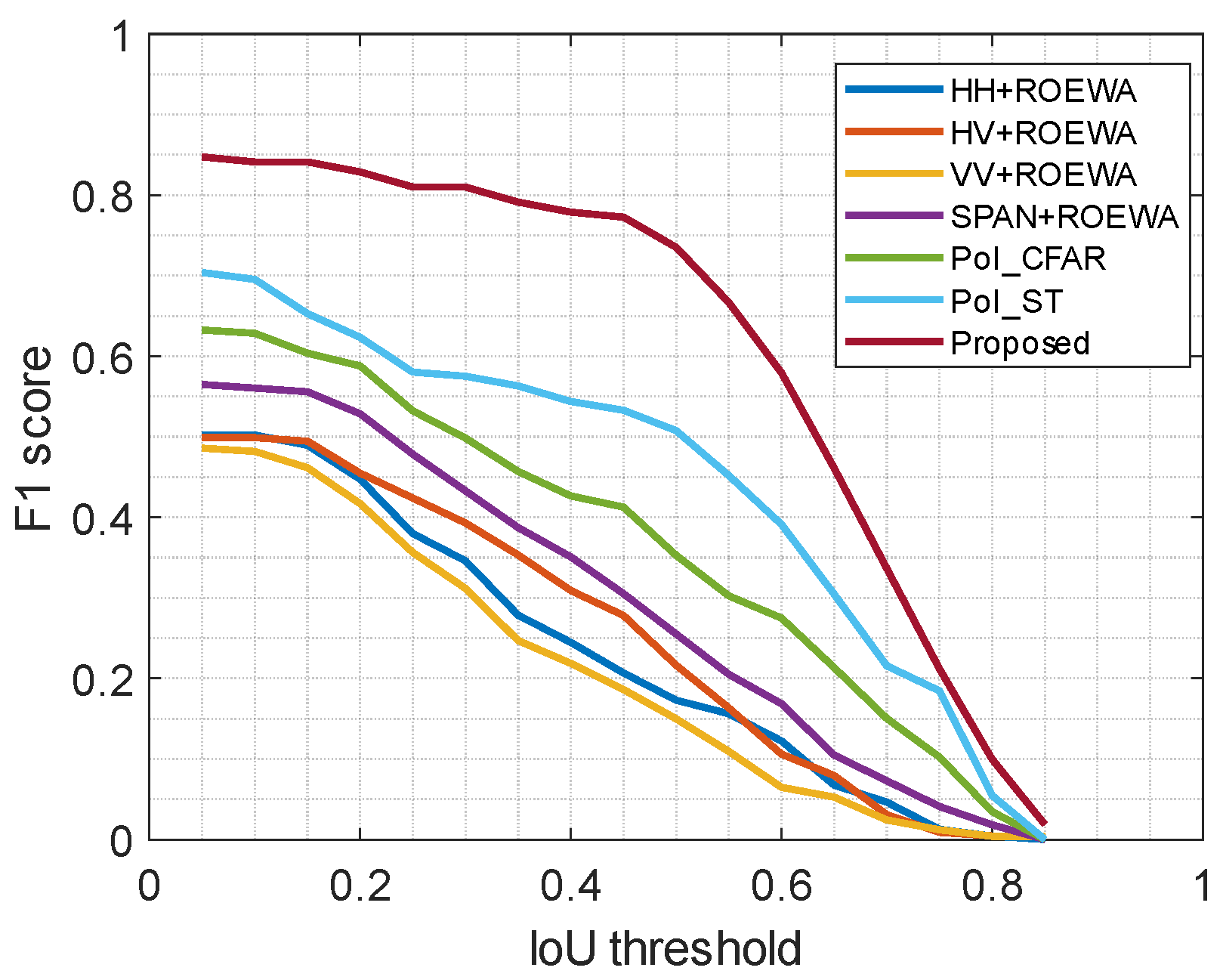
4.2.2. Contour Extraction Accuracy of the Whole Dataset
4.2.3. Comparison of Computational Complexity
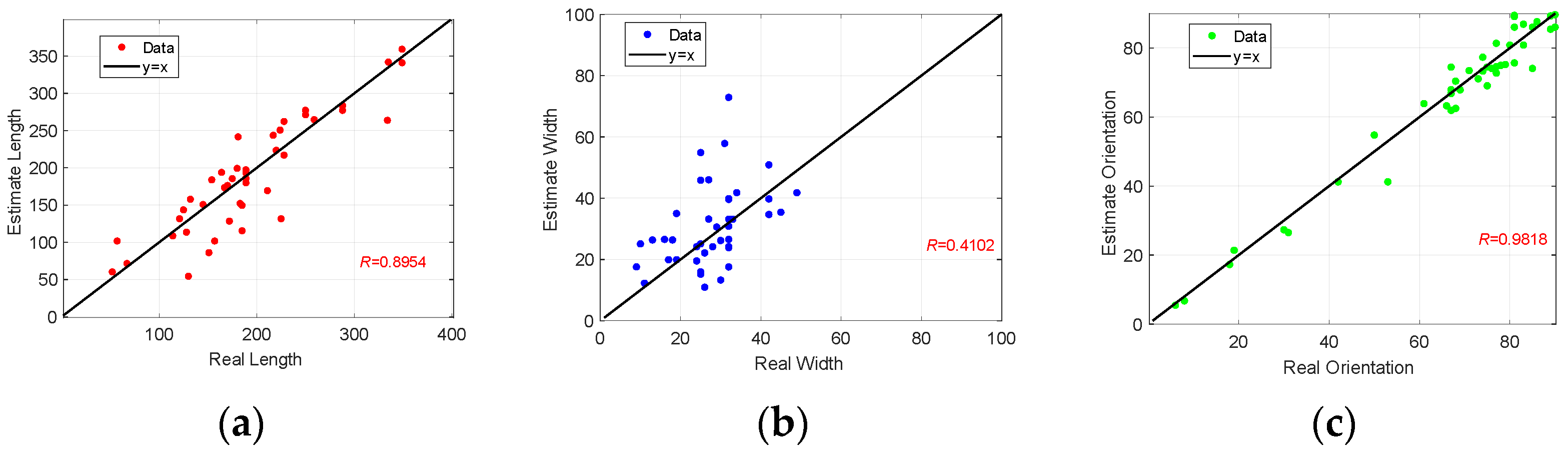
4.2.4. Performance Analysis of Geometric Features Extraction
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cumming, I.G.; Wong, F.H. Digital Processing of Synthetic Aperture Radar Data: Algorithms and Implementation; Artech House: London, UK, 2005. [Google Scholar]
- Yasir, M.; Liu, S.; Pirasteh, S.; Xu, M.; Sheng, H.; Wan, J.; de Figueiredo, F.A.P.; Aguilar, F.J.; Li, J. YOLOShipTracker: Tracking Ships in SAR Images Using Lightweight YOLOv8. Int. J. Appl. Earth Obs. Geoinf. 2024, 134, 104137. [Google Scholar] [CrossRef]
- Touzi, R.; Lopes, A.; Bousquet, P. A statistical and geometrical edge detector for SAR images. IEEE Trans. Geosci. Remote Sens. 1988, 26, 764–773. [Google Scholar] [CrossRef]
- Gemme, L.; Dellepiane, S.G. An automatic data-driven method for SAR image segmentation in sea surface analysis. IEEE Trans. Geosci. Remote Sens. 2018, 56, 2633–2646. [Google Scholar] [CrossRef]
- Li, B.; Liu, B.; Guo, W.; Zhang, Z.; Yu, W. Ship size extraction for sentinel-1 images based on dual-polarization fusion and nonlinear regression: Push error under one pixel. IEEE Trans. Geosci. Remote Sens. 2018, 56, 4887–4905. [Google Scholar] [CrossRef]
- Xiang, D.; Tang, T.; Quan, S.; Guan, D.; Su, Y. Adaptive superpixel generation for SAR images with linear feature clustering and edge constraint. IEEE Trans. Geosci. Remote Sens. 2019, 57, 3873–3889. [Google Scholar] [CrossRef]
- Wei, S.; Zeng, X.; Zhang, H.; Zhou, Z.; Shi, J.; Zhang, X. LFG-Net: Low-level feature guided network for precise ship instance segmentation in SAR images. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–17. [Google Scholar] [CrossRef]
- Wang, X.; Li, G.; Plaza, A.; He, Y. Revisiting SLIC: Fast superpixel segmentation of marine SAR images using density features. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–18. [Google Scholar] [CrossRef]
- Zhao, M.; Zhang, X.; Kaup, A. Multitask learning for SAR ship detection with gaussian-mask joint segmentation. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–16. [Google Scholar] [CrossRef]
- Song, S.; Dai, Y.; Sun, S.; Jin, T. Efficient Image Reconstruction Methods Based on Structured Sparsity for Short-Range Radar. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–15. [Google Scholar] [CrossRef]
- Pitas, I. Digital Image Processing Algorithms and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2000. [Google Scholar]
- Ganugapati, S.; Moloney, C. A ratio edge detector for speckled images based on maximum strength edge pruning. In Proceedings of the International Conference on Image Processing, Washington, DC, USA, 23–26 October 1995. [Google Scholar]
- Fjortoft, R.; Lopes, A.; Marthon, P.; Cubero-Castan, E. An optimal multiedge detector for SAR image segmentation. IEEE Trans. Geosci. Remote Sens. 1998, 36, 793–802. [Google Scholar] [CrossRef]
- Ostu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar]
- Vincent, L.; Soille, P. Watersheds in digital spaces: An efficient algorithm based on immersion simulations. IEEE Trans. Pattern Anal. Mach. Intell. 1991, 13, 583–598. [Google Scholar] [CrossRef]
- Rosenfeld, A.; Thurston, M. Edge and Curve Detection for Visual Scene Analysis. IEEE Trans. Comput. 1971, C-20, 562–569. [Google Scholar]
- Trier, O.D.; Jain, A.K. Goal-directed evaluation of binarization methods. IEEE Trans. Pattern Anal. Mach. Intell. 1995, 17, 1191–1201. [Google Scholar] [CrossRef]
- Bernsen, J. Dynamic thresholding of gray-level images. In Proceedings of the International Conference on Pattern Recognition, Paris, France, 27–31 October 1986; pp. 1251–1255. [Google Scholar]
- Kass, M.; Witkin, A.; Terzopoulos, D. Snakes: Active contour models. Int. J. Comput. Vis. 1988, 1, 321–331. [Google Scholar] [CrossRef]
- Cohen, L.D. On active contour models and balloons. CVGIP Image Underst. 1991, 53, 211–218. [Google Scholar] [CrossRef]
- Xu, C.; Prince, J.L. Snakes, shapes, and gradient vector flow. IEEE Trans. Image Process. 1998, 7, 359–369. [Google Scholar]
- Osher, S.; Sethian, J.A. Fronts propagating with curvature dependent speed: Algorithms based on Hamilton Jacobi formulations. J. Comput. Phys. 1988, 79, 12–49. [Google Scholar] [CrossRef]
- Caselles, V.; Catt’e, F.; Coll, T.; Dibos, F. A geometric model for active contours in image processing. Numer. Math. 1993, 66, 1–31. [Google Scholar] [CrossRef]
- Malladi, R.; Sethian, J.A.; Vemuri, B.C. Shape modeling with front propagation: A level set approach. IEEE Trans. Pattern Anal. Mach. Intell. 1995, 17, 158–175. [Google Scholar] [CrossRef]
- Gao, F.; Han, X.; Wang, J.; Sun, J.; Hussain, A.; Zhou, H. SAR ship instance segmentation with dynamic key points information enhancement. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 11365–11385. [Google Scholar] [CrossRef]
- Gao, F.; Zhong, F.; Sun, J.; Hussain, A.; Zhou, H. BBox-Free SAR hip instance segmentation method based on gaussian heatmap. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–18. [Google Scholar]
- Jiang, M.; Gu, L.; Li, X.; Gao, F.; Jiang, T. Ship contour extraction rom SAR images based on faster R-CNN and Chan-Vese model. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–14. [Google Scholar]
- Zhang, T.; Zhang, X.; Li, J.; Xu, X.; Wang, B.; Zhan, X.; Xu, Y.; Ke, X.; Zeng, T.; Su, H.; et al. SAR ship detection dataset (SSDD): Official release and comprehensive data analysis. Remote Sens. 2021, 13, 3690. [Google Scholar] [CrossRef]
- Schou, J.; Skriver, H.; Nielsen, A.A.; Conradsen, K. CFAR Edge Detector for Polarimetric SAR Images. IEEE Trans. Geosci. Remote Sens. 2003, 41, 20–32. [Google Scholar] [CrossRef]
- Xiang, D.; Ban, Y.; Wang, W.; Tang, T.; Su, Y. Edge Detector for Polarimetric SAR Images Using SIRV Model and Gauss-Shaped Filter. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1661–1665. [Google Scholar] [CrossRef]
- Gomez, L.; Alvarez, L.; Frery, A.C. Local Edginess Measures in PolSAR Imagery by Using Stochastic Distances. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 5796–5799. [Google Scholar]
- Zhuang, Z.; Xiao, S.; Wang, X. Radar Polarization Information Processing and Application; National Defense Industry Press: Arlington, VA, USA, 1999. [Google Scholar]
- Xie, N.; Zhang, T.; Guo, W.; Zhang, Z.; Yu, W. Dual branch deep network for ship classification of dual-polarized SAR images. IEEE Trans. Geosci. Remote Sens. 2024, 62, 5207415. [Google Scholar] [CrossRef]
- Xiang, D.; Ding, H.; Sun, X.; Cheng, J.; Hu, C.; Su, Y. PolSAR image registration combining Siamese multiscale attention network and joint filter. IEEE Trans. Geosci. Remote Sens. 2024, 62, 5208414. [Google Scholar] [CrossRef]
- Wang, S.L.; Wang, X.S.; Xu, Z.H. Principle and approach to polarization modulation for radar super-resolution. Sci. Sin. Informationis 2023, 148, 993–1008. [Google Scholar] [CrossRef]
- Deng, Q.; Chen, J.; Yang, J. Optimization of polarimetric contrast enhancement based on Fisher criterion. IEICE Trans. Commun. 2009, 92, 3968–3971. [Google Scholar] [CrossRef]
- Yang, J.; Yamaguchi, Y.; Boerner, W.-M.; Lin, S. Numerical methods for solving the optimal problem of contrast enhancement. IEEE Trans. Geosci. Remote Sens. 2000, 38, 965–971. [Google Scholar] [CrossRef]
- Achanta, R.; Shaji, A.; Smith, K.; Lucchi, A.; Fua, P.; Süsstrunk, S. Slic superpixels compared to state-of-the-art superpixel methods. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 2274–2282. [Google Scholar] [CrossRef] [PubMed]
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Doll, P.; Zitnick, C.L. Microsoft coco: Common objects in context. In Proceedings of the Computer Vision—ECCV 2014: 13th European Conference, Zurich, Switzerland, 6–12 September 2014; Proceedings, Part V 13. Springer: Berlin/Heidelberg, Germany, 2014; pp. 740–755. [Google Scholar]
- Tings, B.; Bentes da Silva, C.A.; Lehner, S. Dynamically adapted ship parameter estimation using TerraSAR-X images. Int. J. Remote Sens. 2016, 37, 1990–2015. [Google Scholar] [CrossRef]
- Yasir, M.; Liu, S.; Mingming, X.; Wan, J.; Pirasteh, S.; Dang, K.B. ShipGeoNet: SAR image-based geometric feature extraction of ships using convolutional neural networks. IEEE Trans. Geosci. Remote Sens. 2024, 62, 5202613. [Google Scholar] [CrossRef]
- Fitzgibbon, A.; Pilu, M.; Fisher, R.B. Direct least square fitting of ellipses. IEEE Trans. Pattern Anal. Mach. Intell. 1999, 21, 476–480. [Google Scholar] [CrossRef]
- Zhao, L.; Zhang, Q.; Li, Y.; Qi, Y.; Yuan, X.; Liu, J.; Li, H. China’s Gaofen-3 Satellite System and Its Application and Prospect. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 148, 11019–11028. [Google Scholar] [CrossRef]
- Hou, X.; Ao, W.; Song, Q.; Lai, J.; Wang, H.; Xu, F. FUSAR-Ship: Building a High-Resolution SAR-AIS Matchup Dataset of Gaofen-3 for Ship Detection and Recognition. Sci. China Inf. Sci. 2020, 63, 1–19. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Resolution (Range × Azimuth) | Image Size (Range × Azimuth) | Incidence Angle | Number of Ships |
|---|---|---|---|---|
| 1 | 4.49 m × 4.99 m | 4086 × 5733 | 48.72° | 59 |
| 2 | 4.49 m × 4.99 m | 4086 × 5733 | 48.72° | 6 |
| 3 | 2.25 m × 4.76 m | 7297 × 6822 | 32.03° | 74 |
| Single-Target Scene (250 × 300) | Multi Target Scene (400 × 500) | |
|---|---|---|
| ROEWA | 4.90 | 12.72 |
| Pol-CFAR | 12.51 | 35.12 |
| Pol-ST | 10.11 | 28.54 |
| Proposed | 15.01 | 40.08 |
| Average Length Error (AE/RE) | Average Width Error (AE/RE) | Average Orientation Error (AE) | |
|---|---|---|---|
| HH | 53.09 m/28.42% | 11.31 m/45.56% | 5.13° |
| HV | 28.51 m/15.52% | 9.68 m/39.76% | 3.62° |
| VV | 51.40 m/27.53% | 11.64 m/46.76% | 5.04° |
| SPAN | 22.61 m/12.42% | 9.32 m/38.46% | 3.36° |
| Proposed | 20.09 m/11.10% | 8.96 m/37.17% | 3.02° |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, G.; Wang, S.L.; Liu, Y.; Wang, P.; Li, Y. Ship Contour Extraction from Polarimetric SAR Images Based on Polarization Modulation. Remote Sens. 2024, 16, 3669. https://doi.org/10.3390/rs16193669
Wu G, Wang SL, Liu Y, Wang P, Li Y. Ship Contour Extraction from Polarimetric SAR Images Based on Polarization Modulation. Remote Sensing. 2024; 16(19):3669. https://doi.org/10.3390/rs16193669
Chicago/Turabian StyleWu, Guoqing, Shengbin Luo Wang, Yibin Liu, Ping Wang, and Yongzhen Li. 2024. "Ship Contour Extraction from Polarimetric SAR Images Based on Polarization Modulation" Remote Sensing 16, no. 19: 3669. https://doi.org/10.3390/rs16193669