
A FEM Flow Impact Acoustic Model Applied to Rapid Computation of Ocean-Acoustic Remote Sensing in Mesoscale Eddy Seas


Abstract
1. Introduction
2. Materials and Methods
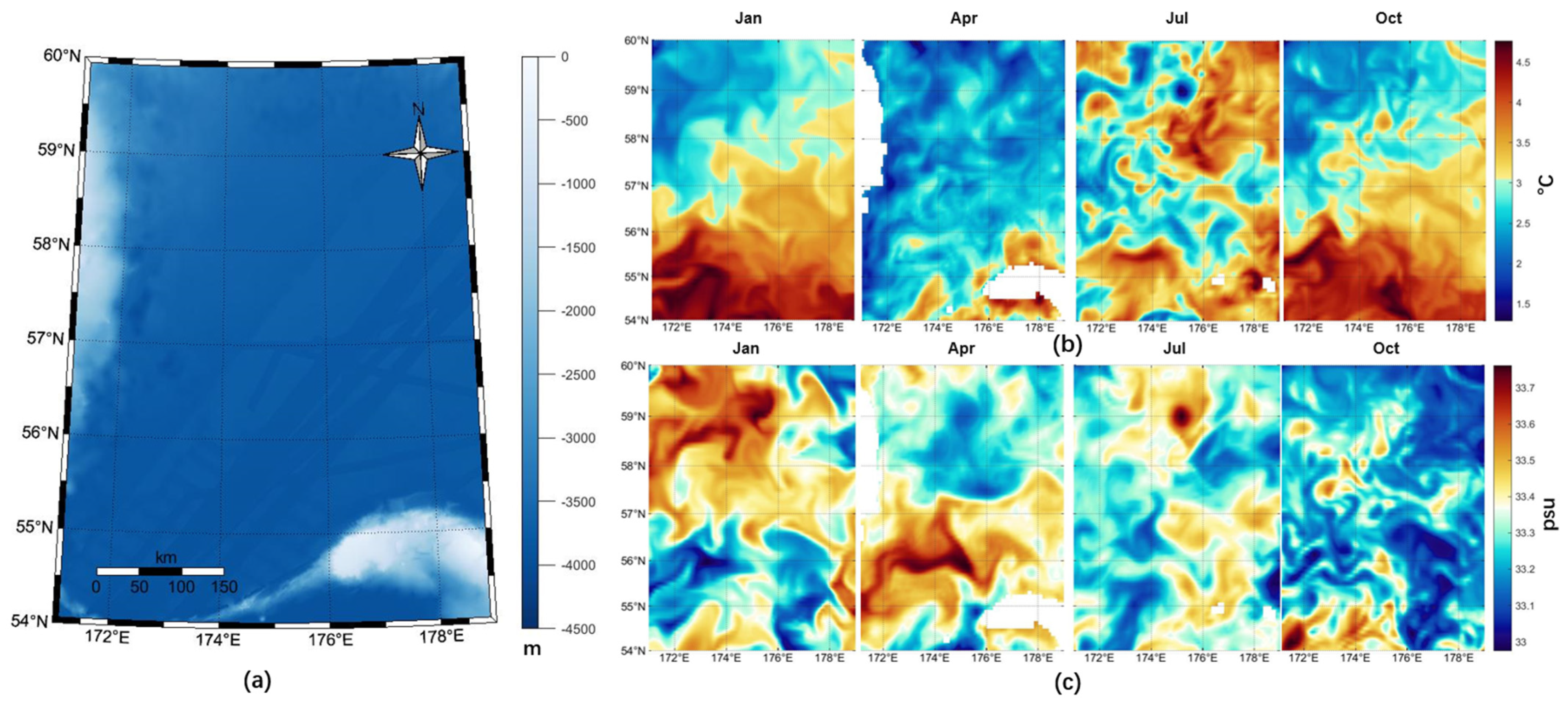
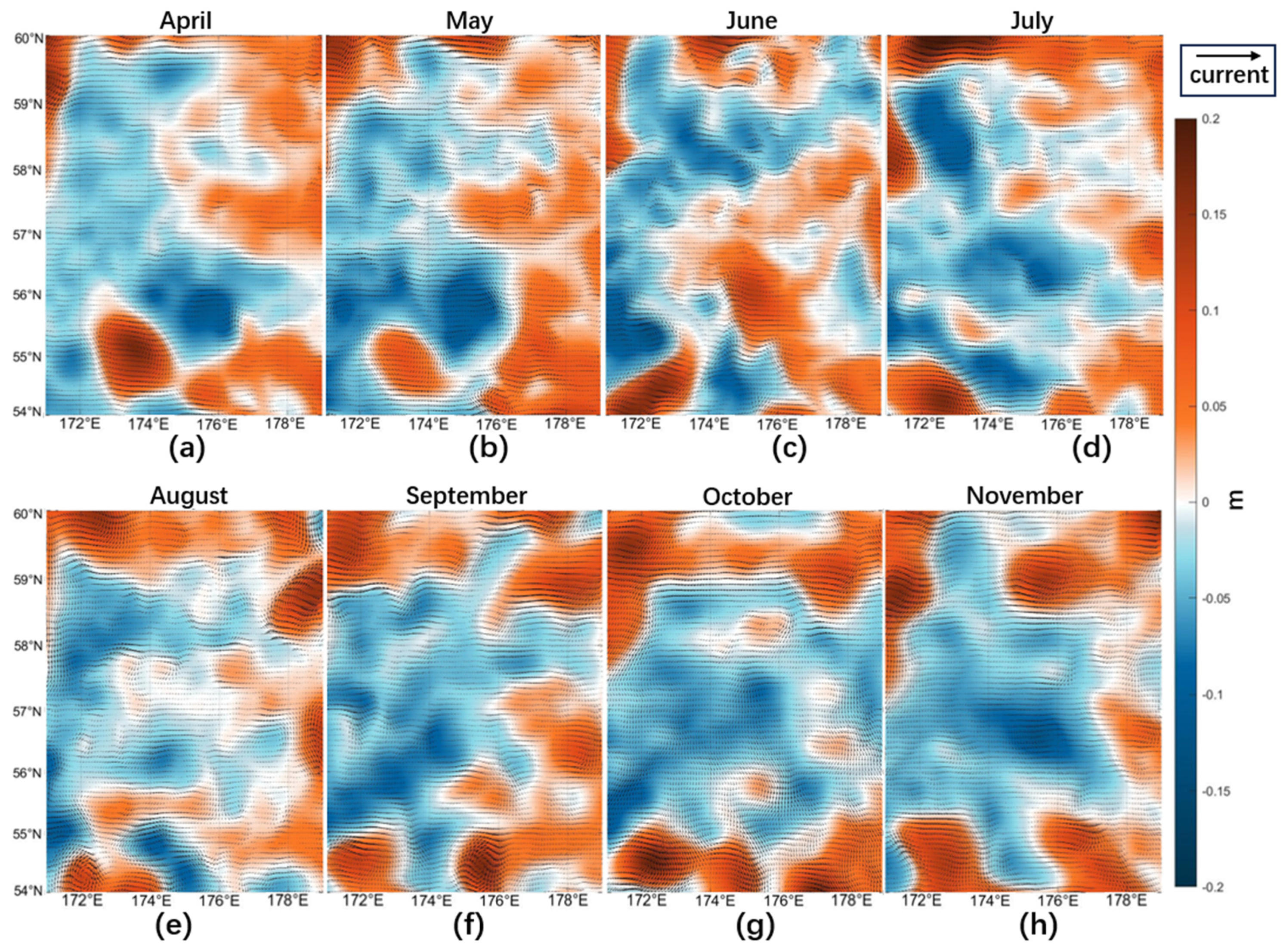
2.1. Satellite Remote Sensing Data
2.2. Finite Element Linear Potential Flow Principle
3. Results
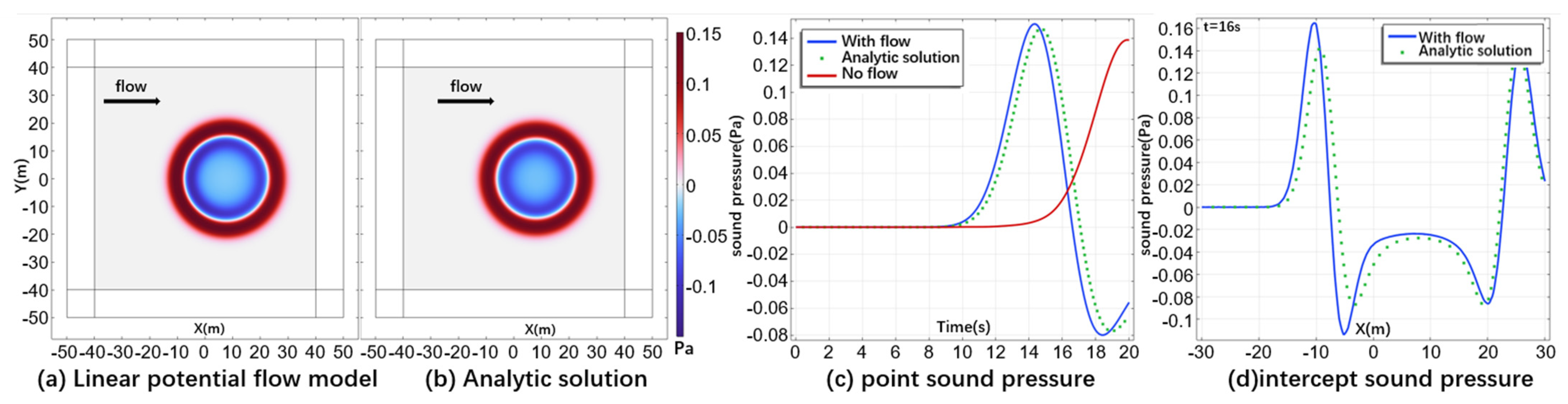
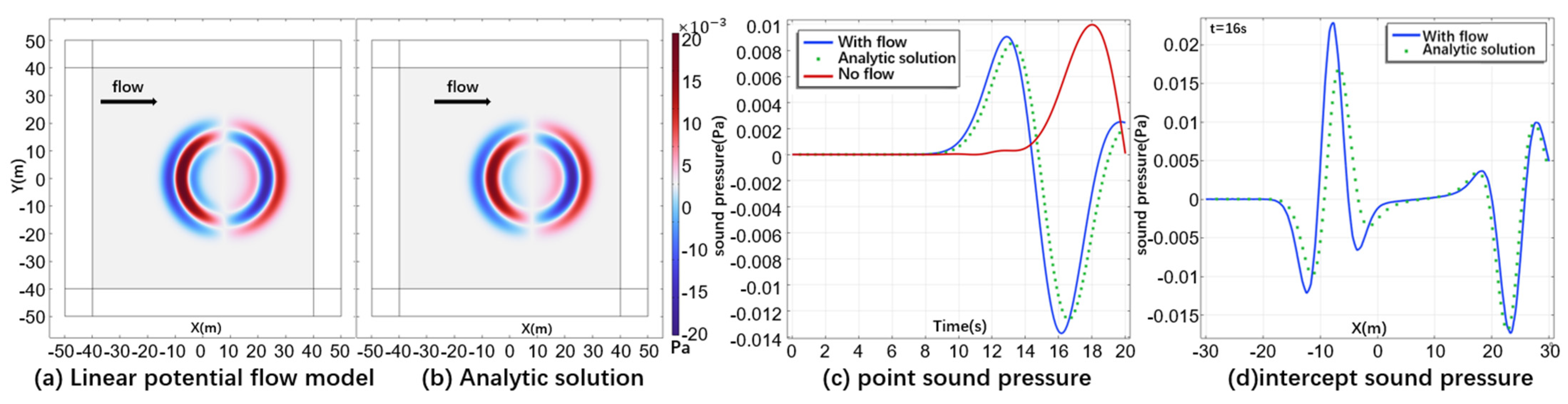
3.1. Model Accuracy Validation
3.2. Positive Application—Eddy-Influenced Sea Area Analysis
3.2.1. Identification of Eddies and Identification of Effects
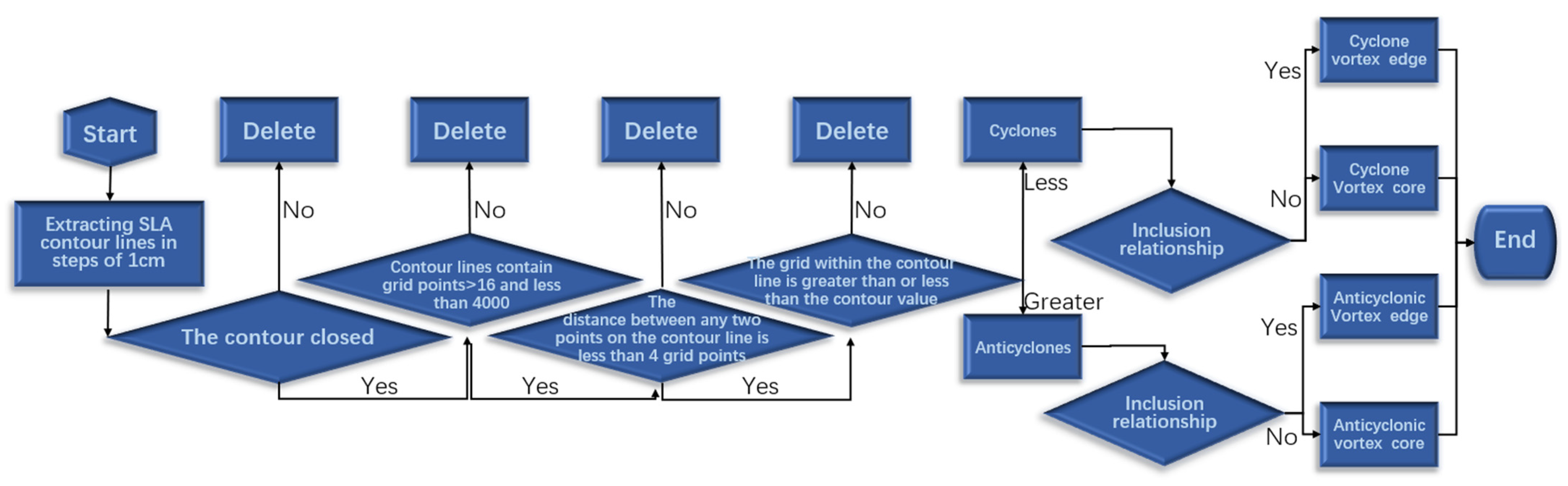
- The sea surface height anomaly data were imported into MATLAB2020b for preprocessing.
- All contours from −1 m to 1 m in the SLA data were extracted with a gradient of 1 cm, after which judgmental screening was performed for each contour.
- Determine if the contour is closed by determining if the contour is connected in the first place, and delete the contour if it is not closed.
- The number of all grid points contained in the contour is determined; if less than or equal to 16, it is considered that no vortex has formed and the contour is rejected; if greater than or equal to 4000, it is considered that the size of the mesoscale vortex is exceeded and that it may be a mixture of several vortices, and the contour is rejected.
- Determine whether the distance between any two points on the contour is less than 4 grid points; this step is to prevent the problem of recognizing vortices sticking to each other as well as recognizing the appearance of distortion.
- Judge whether the values of all the grid points in the contour line are greater or less than the data of the points on the contour line, eliminate the contour lines that do not meet the requirements, and classify the closed curves with the values of the grid points in the contour line less than the contour line as cyclonic vortex and the closed curves with the values of the grid points in the contour line greater than the contour line as an anticyclonic vortex. When the cycle of (2)–(6) steps is finished, two different sets of closed curves are returned.
- Determine the vortex kernel and vortex edge by the containment relationship between each group of closed curves, classify the curve that does not contain any other closed curve of the group as a vortex kernel, and classify the curve that does not have any other curves outside the curve that contain it as a vortex edge.
- All cycles end, returning the vortex edge of the cyclone, the vortex core of the cyclone, the vortex edge of the anticyclone, and the vortex core of the anticyclone.
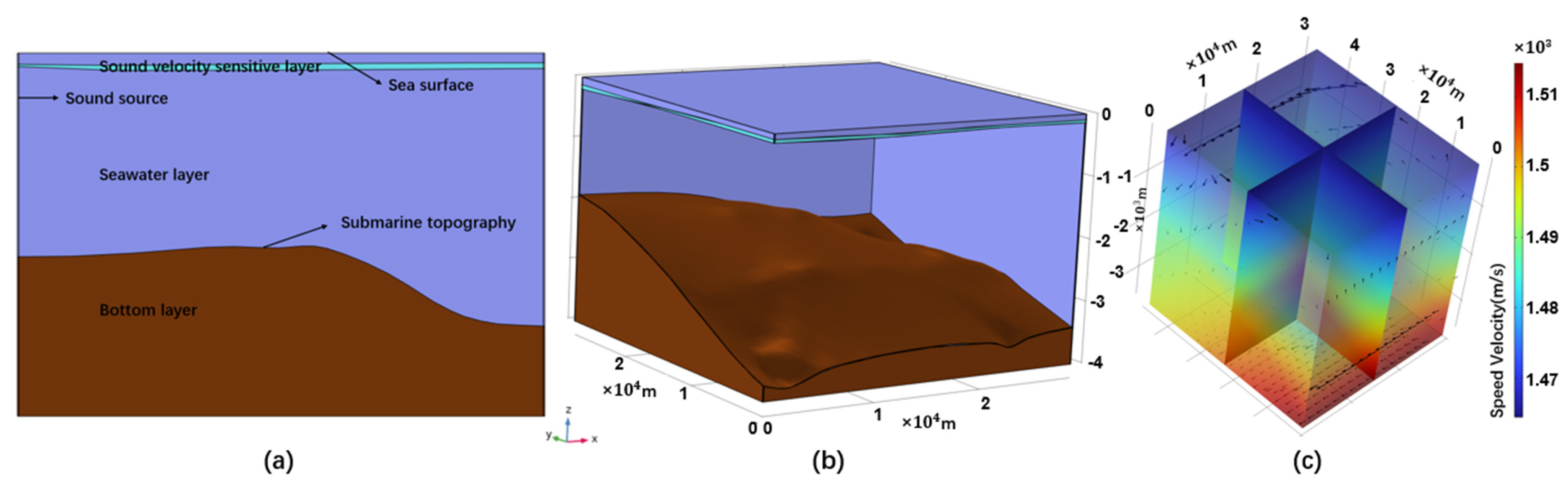
3.2.2. Construction of the Eddy Model
3.2.3. Extraction of Sensitive Areas
3.3. Reverse Application—Sound Velocity Inversion in Current-Affected Waters
3.3.1. SW06 Measured Data
3.3.2. Sound Velocity Inversion Model Design
3.3.3. Fitting Improved Equations
4. Discussion
4.1. Grid Differentiation Model Calculation Results
- Operating system: Window 10 (20H2)
- CPU: AMD EPYC 7402 24-Vore Processor 2.80 GHz *2 (AMD, Made in America)
- RAM: 512 GB (SK Hynix, Made in Korea)
4.2. Results of Mesoscale Eddy Sea Sound Field Analysis
4.3. Inverse Optimization Analysis Results
5. Conclusions
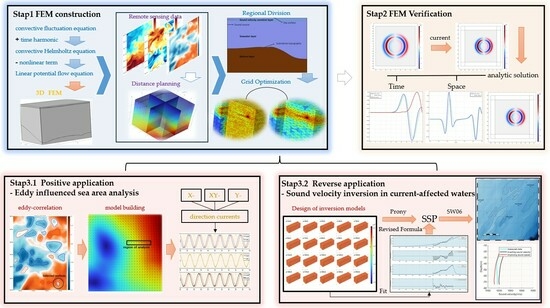
- Based on the linear potential flow theory, a three-dimensional finite element acoustic field model with the ability to analyze the acoustic field under the influence of flow is constructed, which can be used to analyze the acoustic field in the region with a large degree of influence of flow, such as mesoscale eddies and tidal currents. In this paper, after eddy identification, the acoustic field within a mesoscale eddy in the Bering Sea is modeled, and acoustic field parameters such as sound pressure and propagation loss of the acoustic field are calculated.
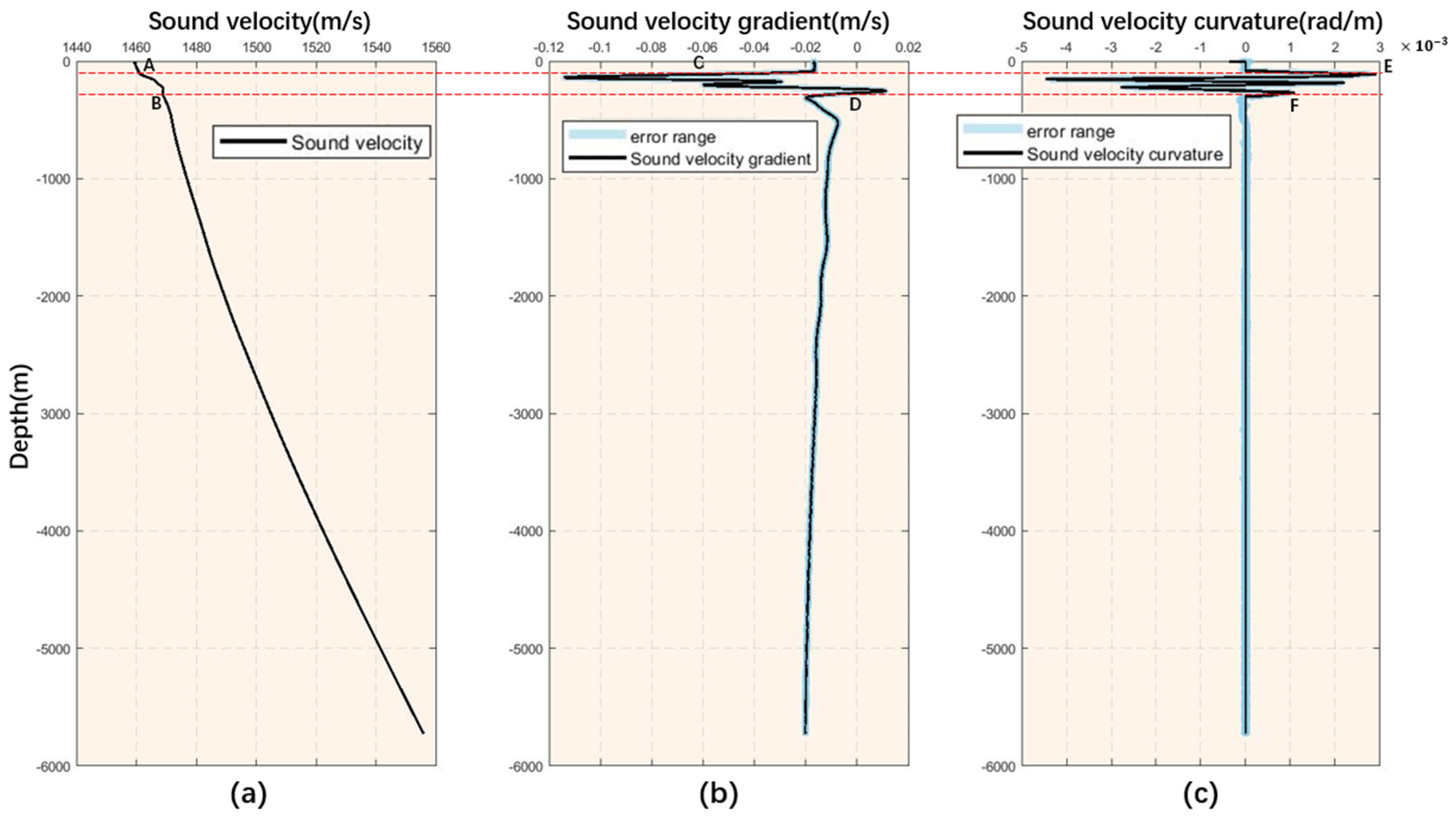
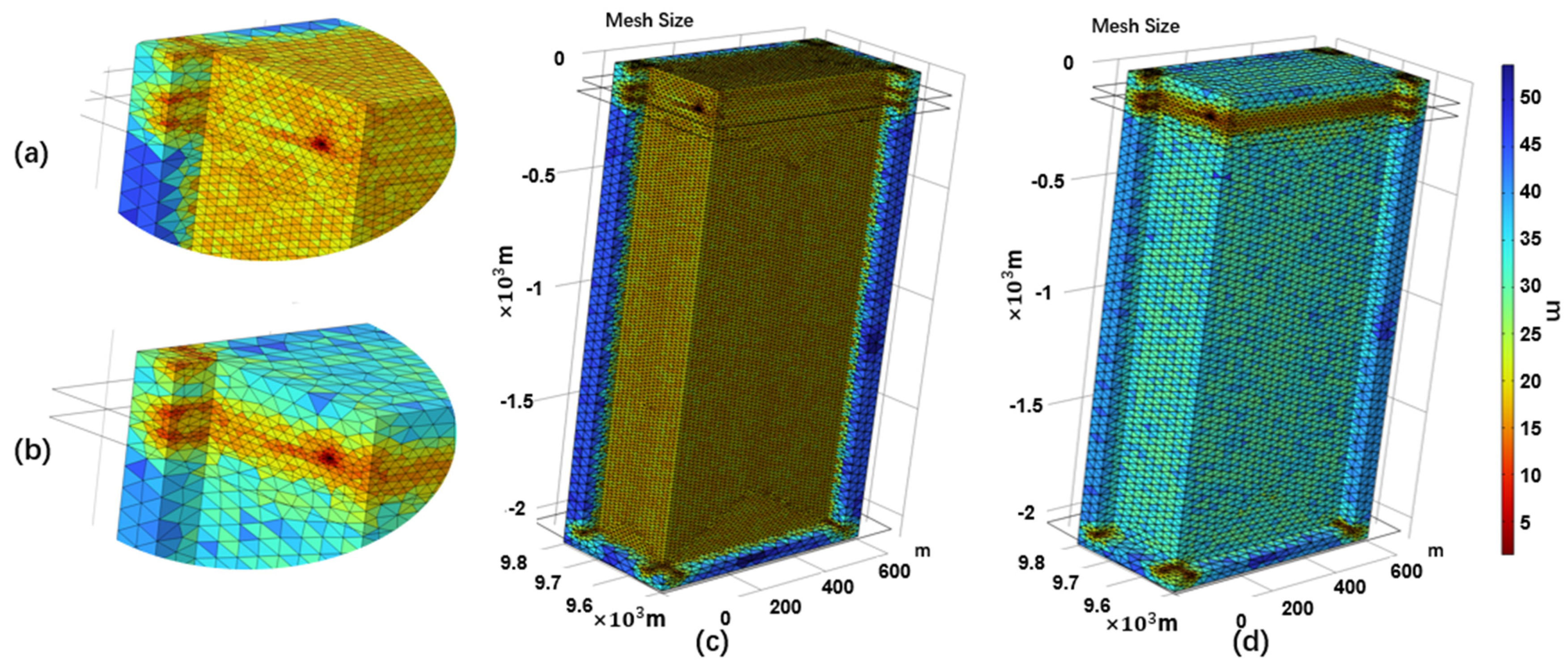
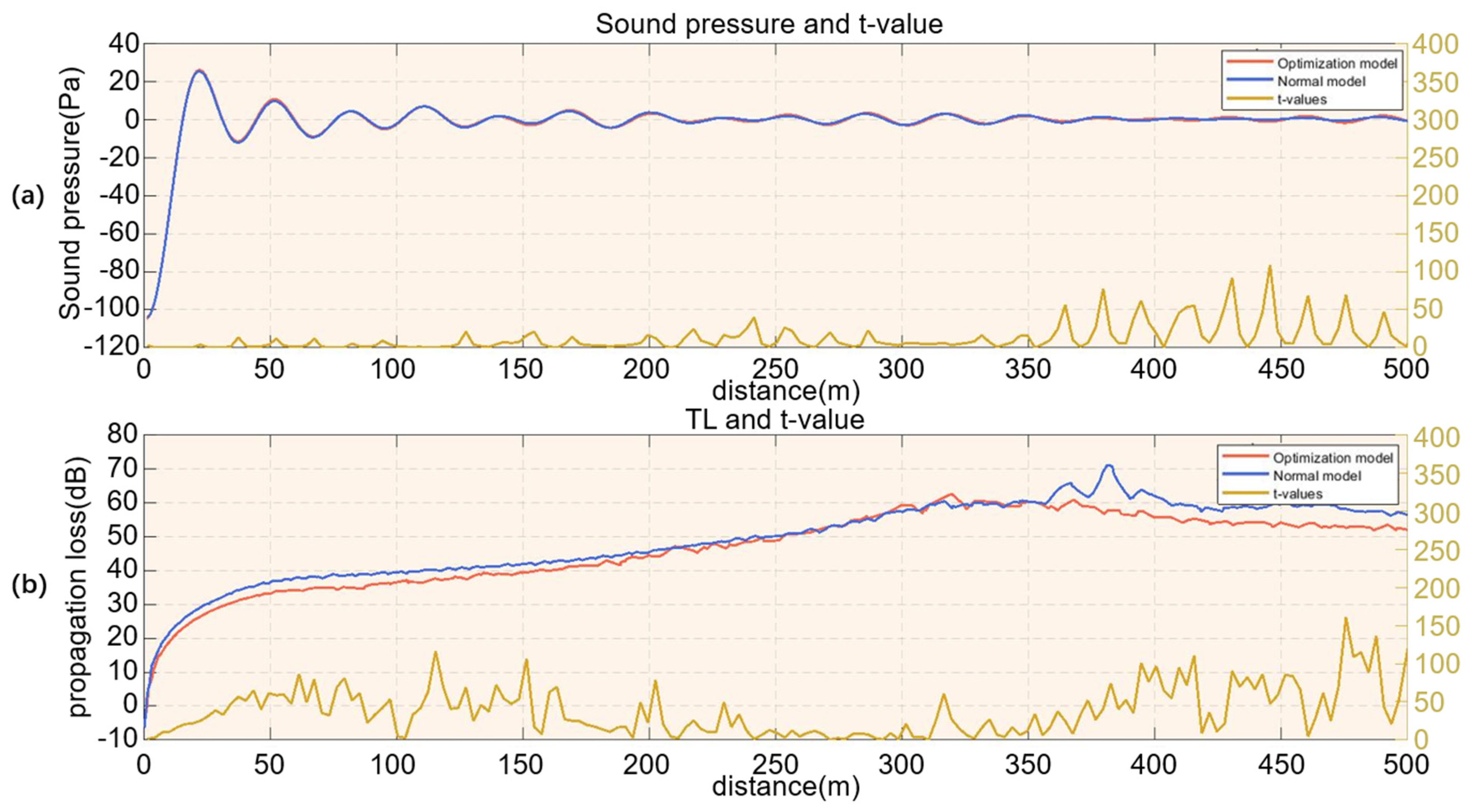
- The mesh structure of the finite element model is optimized to form the sound velocity laminar junction spectral expression by detecting the optimum point of the upper and lower roots of the spectral peaks of the sound velocity profile, thus determining the endpoints of the spectral peaks. According to this method, the sound velocity-sensitive layer and optimization layer are divided, and different grid densities are divided for different regions, so as to improve the computational speed of the model and form a fast field model. After gradually approximating the optimal grid size, the optimum is reached when the grid size of the optimization layer is set to λ/1.852, which saves about 98% of the computation time compared with λ/5, and the computation results maintain a small error.
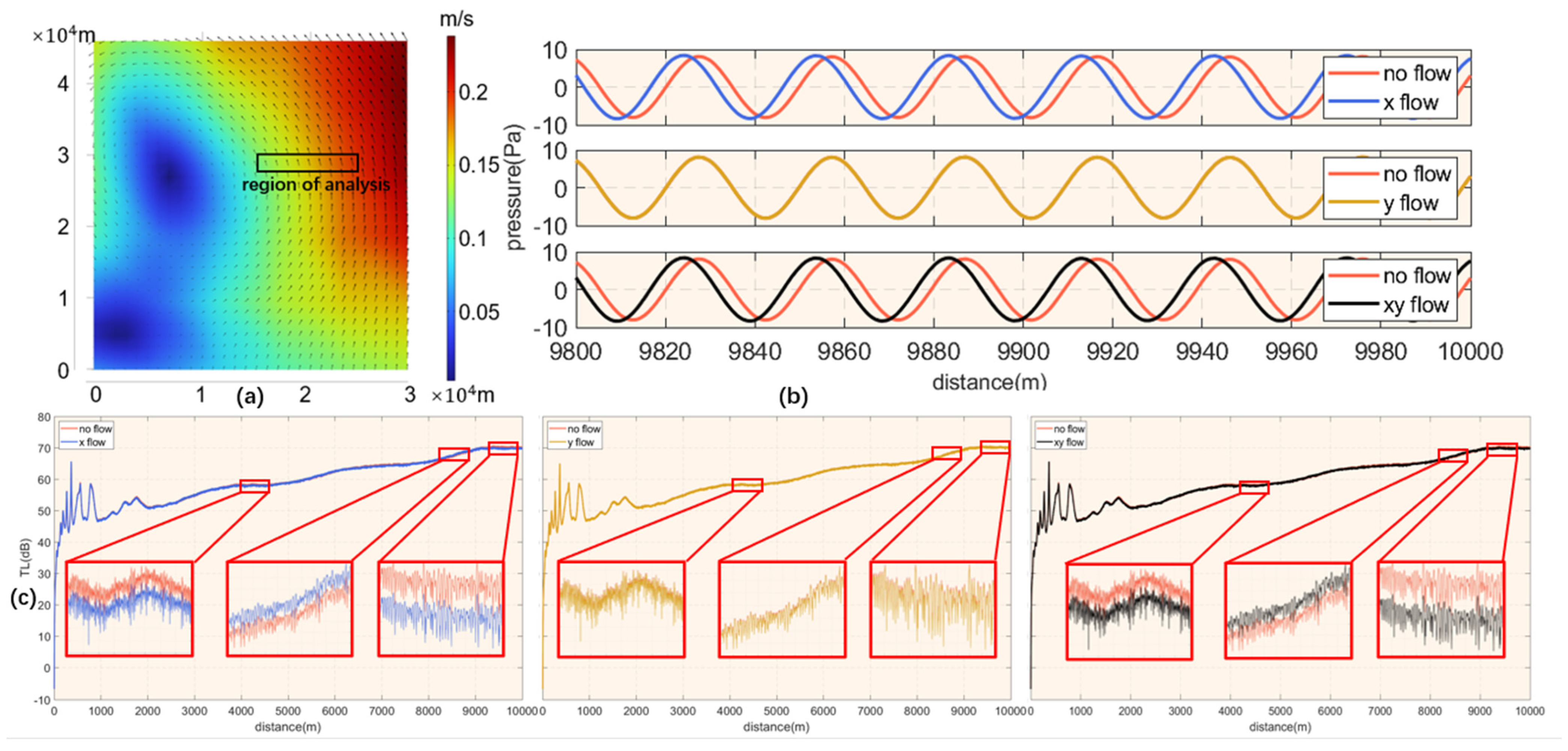
- Applying the model forward to analyze the Bering Sea region, it is found that eddies have a greater effect on the propagation of the sound field along their flow direction, and the effect on the sound field offset can be up to 3.5 m and the effect on the propagation loss error can be up to 1 dB at a range of 10 km.
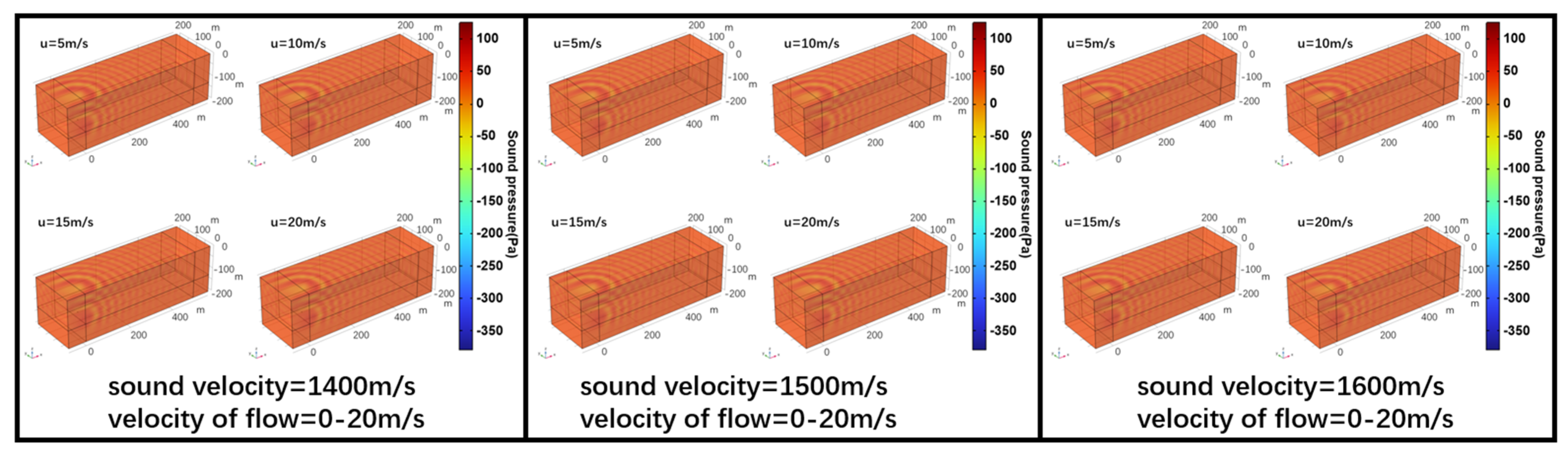
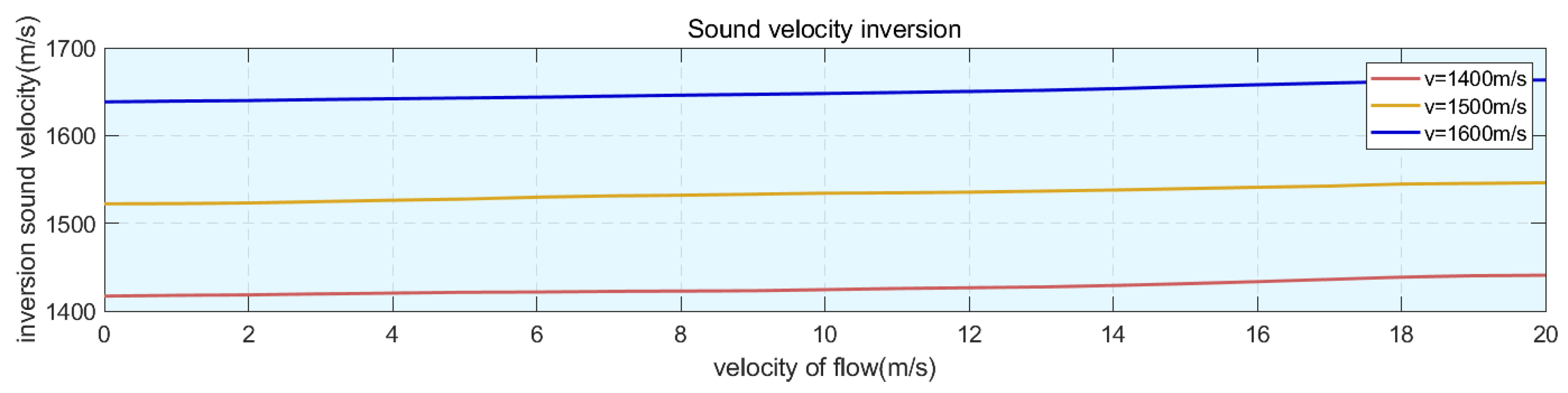
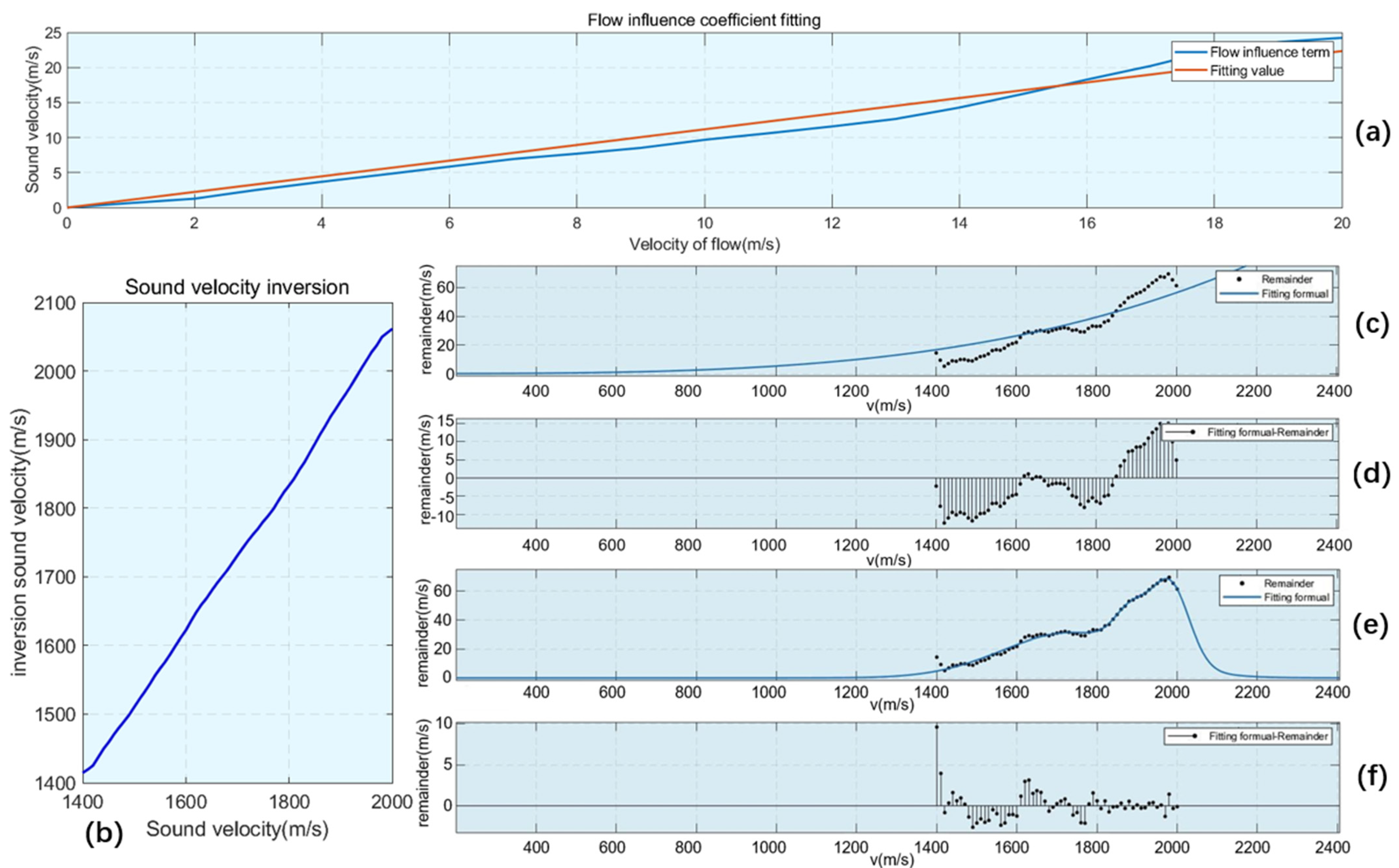
- The application field of the model is expanded by systematically analyzing the sound field inversion results under the influence of different background flow velocities and background sound velocities, fitting to obtain the influence coefficients of the background flow velocities on the sound velocity inversion, and at the same time eliminating the influence of the residual terms to obtain the optimization formula for the sound velocity inversion of the model. The optimization results are validated by the measured data of the four heavily instrumented Environmental Moorings of the SW06 experiment. It is confirmed that the optimized formula helps to improve the inversion results for the speed of sound. The effect of the increase in frequency on the accuracy of the inversion results is derived.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ding, M.; Liu, H.; Lin, P.; Hu, A.; Meng, Y.; Li, Y.; Liu, K. Overestimated Eddy Kinetic Energy in the Eddy-Rich Regions Simulated by Eddy-Resolving Global Ocean–Sea Ice Models. Geophys. Res. Lett. 2022, 49, e2022GL098370. [Google Scholar] [CrossRef]
- Chen, G.; Yang, J.; Han, G. Eddy Morphology: Egg-like Shape, Overall Spinning, and Oceanographic Implications. Remote Sens. Environ. 2021, 257, 112348. [Google Scholar] [CrossRef]
- Cao, L.; Zhang, D.; Zhang, X.; Guo, Q. Detection and Identification of Mesoscale Eddies in the South China Sea Based on an Artificial Neural Network Model—YOLOF and Remotely Sensed Data. Remote Sens. 2022, 14, 5411. [Google Scholar] [CrossRef]
- Koldunov, A.; Fedorov, A.; Bashmachnikov, I.; Belonenko, T. Steric Sea-Level Fluctuations from Remote Sensing, Oceanic Reanalyses and Objective Analyses in the North Atlantic. Russ. J. Earth Sci. 2020, 20, ES3003. [Google Scholar] [CrossRef]
- Costa Da Silva, A.; Chaigneau, A.; Dossa, A.N.; Eldin, G.; Araujo, M.; Bertrand, A. Surface Circulation and Vertical Structure of Upper Ocean Variability Around Fernando de Noronha Archipelago and Rocas Atoll During Spring 2015 and Fall 2017. Front. Mar. Sci. 2021, 8, 598101. [Google Scholar] [CrossRef]
- Volkov, D.L.; Negahdaripour, S. Implementation of the Optical Flow to Estimate the Propagation of Eddies in the South Atlantic Ocean. Remote Sens. 2023, 15, 3894. [Google Scholar] [CrossRef]
- Pekeris, C.L. Theory of propagation of explosive sound in shallow water. In Geological Society of America Memoirs; Geological Society of America: Boulder, CO, USA, 1948; Volume 27, pp. 1–116. [Google Scholar]
- Gao, F.; Xu, F.-H.; Li, Z.-L. Effects of Mesoscale Eddies on the Spatial Coherence of a Middle Range Sound Field in Deep Water. Chin. Phys. B 2022, 31, 114302. [Google Scholar] [CrossRef]
- Zhang, W.; Yang, R.; Zheng, X.; Kong, X. Analysis of Acoustic Field from Airborne Source through Air—Sea Interface. In Proceedings of the 2017 IEEE 3rd Information Technology and Mechatronics Engineering Conference (ITOEC), Chongqing, China, 3–5 October 2017; pp. 730–734. [Google Scholar]
- Chen, W.; Zhang, Y.; Liu, Y.; Ma, L.; Wang, H.; Ren, K.; Chen, S. Parametric Model for Eddies-Induced Sound Speed Anomaly in Five Active Mesoscale Eddy Regions. JGR Ocean. 2022, 127, e2022JC018408. [Google Scholar] [CrossRef]
- Etter, P.C. Underwater Acoustic Modeling and Simulation; Spon Press (Tay & Francis Group): London, UK, 2003. [Google Scholar]
- Liu, W.; Zhang, L.; Wang, W.; Wang, Y.; Ma, S.; Cheng, X.; Xiao, W. A Three-Dimensional Finite Difference Model for Ocean Acoustic Propagation and Benchmarking for Topographic Effects. J. Acoust. Soc. Am. 2021, 150, 1140–1156. [Google Scholar] [CrossRef]
- Cushman-Roisin, B.; Beckers, J.-M. Introduction to Geophysical Fluid Dynamics: Physical and Numerical Aspects. In International Geophysics; Elsevier: Amsterdam, The Netherlands, 2011; Volume 101, pp. 795–813. ISBN 978-0-12-088759-0. [Google Scholar]
- Heilmann, G.; Sattelmayer, T. On the Convective Wave Equation for the Investigation of Combustor Stability Using FEM-Methods. Int. J. Spray Combust. Dyn. 2022, 14, 55–71. [Google Scholar] [CrossRef]
- Jensen, F.B.; Kuperman, W.A.; Porter, M.B.; Schmidt, H.; McKay, S. Computational Ocean Acoustics. Comput. Phys. 1995, 9, 55–56. [Google Scholar] [CrossRef]
- Wang, R.; Chen, W.; Zhu, L.; Ji, S.; Li, X.; Dai, L.; Yang, Y. Modeling of Acoustic Emission Generated by Filter Capacitors in HVDC Converter Station. IEEE Access 2019, 7, 102876–102886. [Google Scholar] [CrossRef]
- Khan, S.; Song, Y.; Huang, J.; Piao, S. Analysis of Underwater Acoustic Propagation under the Influence of Mesoscale Ocean Vortices. JMSE 2021, 9, 799. [Google Scholar] [CrossRef]
- Tang, Y.; Zhou, Q.; Wang, X.; Xie, Z. A Computational Method for Acoustic Interaction with Large Complicated Underwater Structures Based on the Physical Mechanism of Structural Acoustics. Adv. Mater. Sci. Eng. 2022, 2022, 3631241. [Google Scholar] [CrossRef]
- Bonomo, A.L.; Chotiros, N.P.; Isakson, M.J. On the Validity of the Effective Density Fluid Model as an Approximation of a Poroelastic Sediment Layer. J. Acoust. Soc. Am. 2015, 138, 748–757. [Google Scholar] [CrossRef]
- Zou, M.-S.; Liu, S.-X.; Jiang, L.-W.; Huang, H. A Mixed Analytical-Numerical Method for the Acoustic Radiation of a Spherical Double Shell in the Ocean-Acoustic Environment. Ocean Eng. 2020, 199, 107040. [Google Scholar] [CrossRef]
- Zhou, Y.-Q.; Luo, W.-Y. A Finite Element Model for Underwater Sound Propagation in 2-D Environment. JMSE 2021, 9, 956. [Google Scholar] [CrossRef]
- Wang, Z.; Xu, J.; Zhang, X.; Lu, C.; Jin, K.; Zhang, Y. Flow-Dependent Modeling of Acoustic Propagation Based on DG-FEM Method. J. Atmos. Ocean. Technol. 2021, 38, 1823–1832. [Google Scholar] [CrossRef]
- Fu, M.; Dong, C.; Dong, J.; Sun, W. Analysis of Mesoscale Eddy Merging in the Subtropical Northwest Pacific Using Satellite Remote Sensing Data. Remote Sens. 2023, 15, 4307. [Google Scholar] [CrossRef]
- Lecoulant, J.; Guennou, C.; Guillon, L.; Royer, J.-Y. Three-Dimensional Modeling of Earthquake Generated Acoustic Waves in the Ocean in Simplified Configurations. J. Acoust. Soc. Am. 2019, 146, 2113–2123. [Google Scholar] [CrossRef]
- An, B.; Zhang, C.; Shang, D.; Xiao, Y.; Khan, I.U. A Combined Finite Element Method with Normal Mode for the Elastic Structural Acoustic Radiation in Shallow Water. J. Theor. Comp. Acout. 2020, 28, 2050004. [Google Scholar] [CrossRef]
- Dangla, V.; Soize, C.; Cunha, G.; Mosson, A.; Kassem, M.; Van Den Nieuwenhof, B. Robust Three-Dimensional Acoustic Performance Probabilistic Model for Nacelle Liners. AIAA J. 2021, 59, 4195–4211. [Google Scholar] [CrossRef]
- Zhang, F.; He, W.; Zhong, J. Nonlinear Distortion Characteristic Analysis for the Finite Amplitude Sound Pressures in the Pistonphone. J. Comp. Acous. 2017, 25, 1850008. [Google Scholar] [CrossRef]
- Wang, F.; Di Mare, L. Analysis of Transonic Bladerows With Non-Uniform Geometry Using the Spectral Method. J. Turbomach. 2021, 143, 121012. [Google Scholar] [CrossRef]
- Guseva, E.; Egorov, Y. Application of LES Combined with a Wave Equation for the Simulation of Noise Induced by a Flow Past a Generic Side Mirror. Int. J. Aeroacoustics 2022, 21, 6–21. [Google Scholar] [CrossRef]
- Prasad, C.; Gaitonde, D.V. A Robust Physics-Based Method to Filter Coherent Wavepackets from High-Speed Schlieren Images. J. Fluid Mech. 2022, 940, R1. [Google Scholar] [CrossRef]
- Zhabin, I.A.; Dmitrieva, E.V.; Taranova, S.N. Mesoscale Eddies in the Bering Sea from Satellite Altimetry Data. Izv. Atmos. Ocean. Phys. 2021, 57, 1627–1642. [Google Scholar] [CrossRef]
- Timmermans, M.; Marshall, J. Understanding Arctic Ocean Circulation: A Review of Ocean Dynamics in a Changing Climate. JGR Ocean. 2020, 125, e2018JC014378. [Google Scholar] [CrossRef]
- Chelton, D.B.; Schlax, M.G.; Samelson, R.M. Global Observations of Nonlinear Mesoscale Eddies. Prog. Oceanogr. 2011, 91, 167–216. [Google Scholar] [CrossRef]
- Lomov, A.A. On convergence of M. Osborne’ inverse iteration algorithms for modified Prony method. Sib. Elektron. Mat. Izv. 2019, 16, 1916–1926. [Google Scholar] [CrossRef]
- Bonnel, J.; Pecknold, S.P.; Hines, P.C.; Chapman, N.R. An Experimental Benchmark for Geoacoustic Inversion Methods. IEEE J. Ocean. Eng. 2021, 46, 261–282. [Google Scholar] [CrossRef]
- Taroudakis, M.; Smaragdakis, C.; Ross Chapman, N. Inversion of Acoustical Data from the “Shallow Water 06” Experiment by Statistical Signal Characterization. J. Acoust. Soc. Am. 2014, 136, EL336–EL342. [Google Scholar] [CrossRef] [PubMed]
- Andreev, A.G.; Budyansky, M.V.; Khen, G.V.; Uleysky, M.Y. Water Dynamics in the Western Bering Sea and Its Impact on Chlorophyll a Concentration. Ocean Dyn. 2020, 70, 593–602. [Google Scholar] [CrossRef]
- Cesbron, G.; Melet, A.; Almar, R.; Lifermann, A.; Tullot, D.; Crosnier, L. Pan-European Satellite-Derived Coastal Bathymetry—Review, User Needs and Future Services. Front. Mar. Sci. 2021, 8, 740830. [Google Scholar] [CrossRef]
- Ciliberti, S.A.; Jansen, E.; Coppini, G.; Peneva, E.; Azevedo, D.; Causio, S.; Stefanizzi, L.; Creti’, S.; Lecci, R.; Lima, L.; et al. The Black Sea Physics Analysis and Forecasting System within the Framework of the Copernicus Marine Service. JMSE 2022, 10, 48. [Google Scholar] [CrossRef]
- Irazoqui Apecechea, M.; Melet, A.; Armaroli, C. Towards a Pan-European Coastal Flood Awareness System: Skill of Extreme Sea-Level Forecasts from the Copernicus Marine Service. Front. Mar. Sci. 2023, 9, 1091844. [Google Scholar] [CrossRef]
- Meindl, M.; Emmert, T.; Polifke, W. Efficient Calculation of Thermoacoustic Modes Utilizing State-Space Models. In Proceedings of the 23nd International Congress on Sound and Vibration (ICSV23), Athens, Greece, 10–14 July 2016. [Google Scholar]
- Hardin, J.C.; Ristorcelli, J.R.; Tam, C.K.W. Solutions of the Benchmark Problems by the Dispersion-Relation-Preserving Scheme. In Proceedings of the ICASE/LaRC Workshop on Benchmark Problems in Computational Aeroacoustics (CAA), Hampton, VA, USA, 24–26 October 1994. [Google Scholar]
- Atkins, H.L.; Shu, C.-W. Quadrature-Free Implementation of Discontinuous Galerkin Method for Hyperbolic Equations. AIAA J. 1998, 36, 775–782. [Google Scholar] [CrossRef]
- Santra, M.; Goff, J.A.; Steel, R.J.; Austin, J.A. Forced Regressive and Lowstand Hudson45 Paleo-Delta System: Latest Pliocene Growth of the Outer New Jersey Shelf. Mar. Geol. 2013, 339, 57–70. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Type | Maximum Grid Size for Sensitive Layers | Maximum Grid Size for Optimization Layer | Grid Construction Time | Computation Time |
|---|---|---|---|---|
| Traditional Model | λ/5 | λ/5 | 128 s | 6 h 24 min 16 s |
| Optimization Models1 | λ/5 | λ/4 | 72 s | 29 min 27 s |
| Optimization Models2 | λ/5 | λ/3 | 36 s | 10 min 7 s |
| Optimization Models3 | λ/5 | λ/2 | 17 s | 3 min 9 s |
| Optimization Models | λ/5 | λ | 11 s | 1 min 26 s |
| X-Direction Translation (m) | Y-Direction Translation (m) | Model Computation Time | X-Direction Translation (m) | Y-Direction Translation (m) | Model Computation Time |
|---|---|---|---|---|---|
| 5000 | 0 | 3 min 6 s | 0 | 5000 | 3 min 10 s |
| 4000 | 0 | 3 min 10 s | 0 | 4000 | 3 min 2 s |
| 3000 | 0 | 3 min 7 s | 0 | 3000 | 3 min 0 s |
| 2000 | 0 | 3 min 5 s | 0 | 2000 | 2 min 53 s |
| 1000 | 0 | 2 min 52 s | 0 | 1000 | 2 min 45 s |
| −1000 | 0 | 3 min 10 s | 0 | −1000 | 3 min 6 s |
| −2000 | 0 | 3 min 4 s | 0 | −2000 | 3 min 4 s |
| −3000 | 0 | 2 min 52 s | 0 | −3000 | 2 min 50 s |
| −4000 | 0 | 2 min 53 s | 0 | −4000 | 3 min 6 s |
| −5000 | 0 | 3 min 5 s | 0 | −5000 | 3 min 4 s |
| 50 [Hz] | Moor29 | Moor30 | Moor32 | Moor33 | Mean Value |
|---|---|---|---|---|---|
| Inverse Speed of Sound RMS | 15.133 | 15.003 | 14.953 | 23.593 | 17.170 |
| Improved Speed of Sound1 RMS | 25.979 | 11.170 | 9.187 | 8.324 | 13.665 |
| Improved Speed of Sound2 RMS | 20.302 | 7.039 | 5.144 | 11.739 | 11.056 |
| 100 [Hz] | Moor29 | Moor30 | Moor32 | Moor33 | Mean Value |
|---|---|---|---|---|---|
| Inverse Speed of Sound RMS | 12.116 | 14.649 | 14.335 | 23.912 | 16.253 |
| Improved Speed of Sound1 RMS | 23.167 | 10.318 | 9.332 | 10.228 | 13.261 |
| Improved Speed of Sound2 RMS | 17.236 | 5.862 | 4.477 | 12.702 | 10.069 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Xu, J.; Jin, K.; Feng, R.; Xu, L.; Chen, L.; Chen, D.; Qiao, J. A FEM Flow Impact Acoustic Model Applied to Rapid Computation of Ocean-Acoustic Remote Sensing in Mesoscale Eddy Seas. Remote Sens. 2024, 16, 326. https://doi.org/10.3390/rs16020326
Liu Y, Xu J, Jin K, Feng R, Xu L, Chen L, Chen D, Qiao J. A FEM Flow Impact Acoustic Model Applied to Rapid Computation of Ocean-Acoustic Remote Sensing in Mesoscale Eddy Seas. Remote Sensing. 2024; 16(2):326. https://doi.org/10.3390/rs16020326
Chicago/Turabian StyleLiu, Yi, Jian Xu, Kangkang Jin, Rui Feng, Luochuan Xu, Linglong Chen, Dan Chen, and Jiyao Qiao. 2024. "A FEM Flow Impact Acoustic Model Applied to Rapid Computation of Ocean-Acoustic Remote Sensing in Mesoscale Eddy Seas" Remote Sensing 16, no. 2: 326. https://doi.org/10.3390/rs16020326
APA StyleLiu, Y., Xu, J., Jin, K., Feng, R., Xu, L., Chen, L., Chen, D., & Qiao, J. (2024). A FEM Flow Impact Acoustic Model Applied to Rapid Computation of Ocean-Acoustic Remote Sensing in Mesoscale Eddy Seas. Remote Sensing, 16(2), 326. https://doi.org/10.3390/rs16020326