

Current Status and Future Trends of Meter-Level Indoor Positioning Technology: A Review


Abstract
:1. Introduction
2. Current Development of Meter-Level Indoor Positioning Technologies
2.1. Current Development of Geometry-Relation-Based Positioning
2.1.1. Wi-Fi-FTM-Based Positioning
2.1.2. UWB-Based Positioning
2.1.3. Acoustic-Based Positioning
2.1.4. Pseudo-Satellite-Based Positioning
2.1.5. 5G-Based Positioning
2.1.6. Visible-Light-Based Positioning
2.2. Current Development of Fingerprint-Based Positioning
2.2.1. Magnetic-Field-Based Positioning
2.2.2. Channel-State-Information-Based Positioning
2.3. Current Development of Incremental-Estimation-Based Positioning
2.3.1. Inertial Navigation
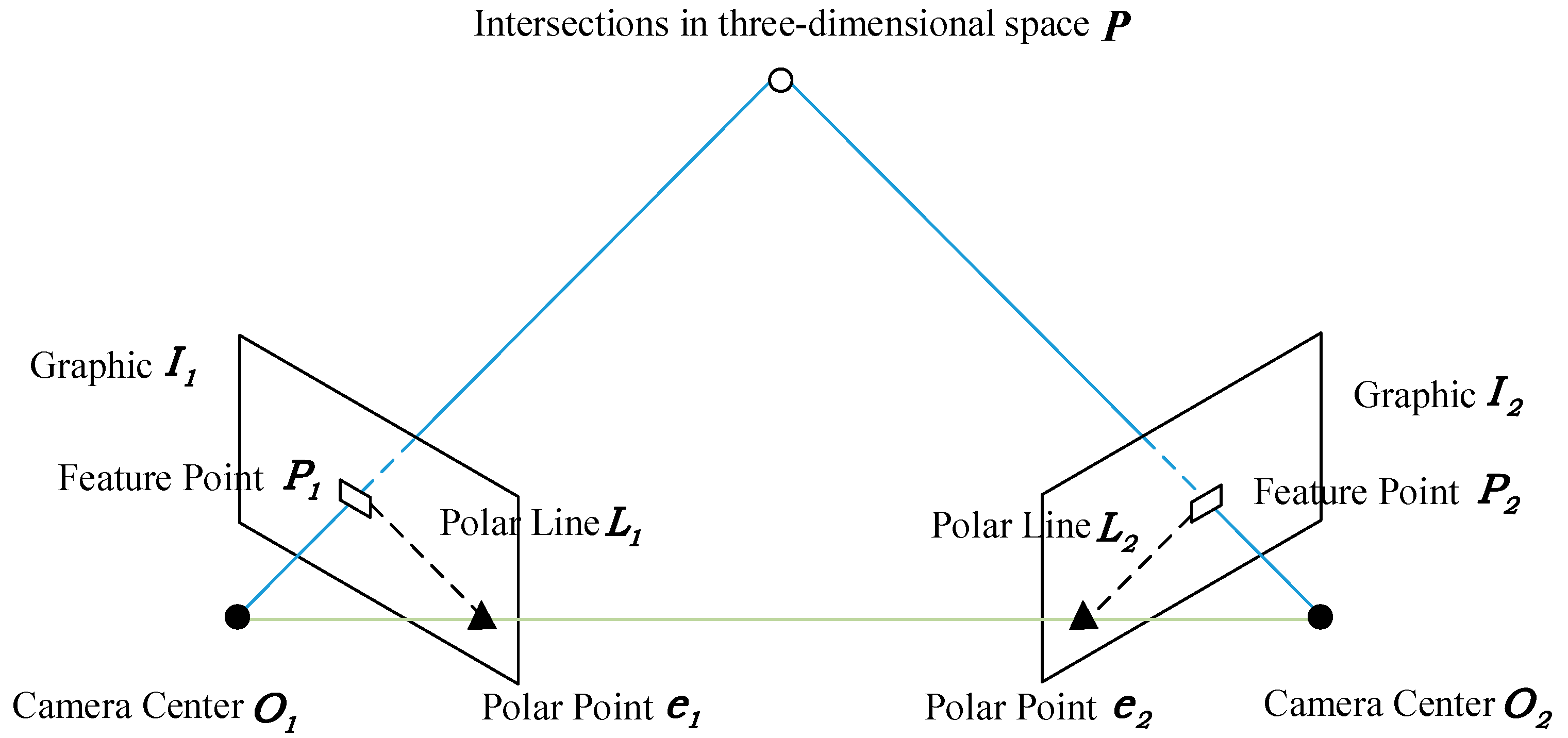
2.3.2. Visual/Laser Odometry
2.4. Current Development of Quantum Navigation
3. Characteristics of Current Meter-Level Indoor Positioning Technologies
- High measurement accuracy: High-precision indoor positioning technologies based on geometric relations rely on the accuracy of time synchronization and the precision of distance and angle estimation. The TDOA positioning method only requires time synchronization between base stations. In audio-based positioning, achieving time synchronization is relatively easy due to the slower speed of sound. In this case, the focus is primarily on detecting the first path and avoiding significant time errors caused by multipath propagation, thus achieving higher positioning accuracy. For positioning methods based on the TOA principle, precise time synchronization between the transmitter and receiver is needed to ensure accurate distance measurement. Signals with high bandwidth offer excellent time resolution, resulting in higher estimation accuracy. In positioning, consideration is mainly given to the impact of hardware delays. For indoor positioning based on the AOA method, the multi-antenna array of 5G signals provides high-precision angle information, thereby obtaining accurate positioning results.
- Strong spatial dependency: High-precision positioning technologies based on fingerprint matching rely on spatial characteristics and the correlation between geographical locations, exhibiting strong spatial dependency. The establishment of fingerprints and the positioning phase are often asynchronous. Wi-Fi and LTE positioning based on CSI rely on relatively stable feature fingerprints. During the positioning phase, signal obstructions have a significant impact on the positioning results, making them highly sensitive to spatial variations. Magnetic field-based positioning relies on a previously captured magnetic reference map and the current magnetic information for comparison to obtain the positioning result. The more pronounced the spatial changes are, the more significant the magnetic information becomes. Any changes in the physical information within space directly affect the accuracy of the magnetic reference map.
- Limited environmental adaptability: Localization methods based on incremental estimation accumulate errors over time, resulting in lower positioning accuracy. Inertial sensors can provide absolute information based on measured triaxial acceleration and angular velocity, and they have a high sampling rate. However, long-term velocity and displacement integration leads to increased errors. Visual odometry relies on cameras to track key feature points in the scene. It can face challenges in scenes with weak texture or when there is rapid motion, resulting in the loss of key feature point information and the inability to obtain absolute information. Furthermore, the presence of dynamic objects in the scene can interfere with both visual and laser odometry, leading to decreased accuracy and reliability.
4. Development Trends of Meter-Level Indoor Positioning Technologies
4.1. Diversification: Multi-Source Fusion Enhanced by Environmental Perception
4.2. Intelligence: Interdisciplinary Integration with Deep Learning
- Motion scene and behavior detection: Current indoor positioning solutions still face various issues, including low-quality device data and unstable positioning source signals, which compromise system stability. Accurately perceiving the user’s location scene and behavioral semantics can make indoor positioning applications more ubiquitous and robust, and it is also a key aspect of future intelligent location services. Compared to traditional methods that rely on manually defined low-level features for scene classification and motion behavior detection, deep neural networks can automatically learn high-level features from data provided by positioning sources, achieving higher recognition accuracy.
- Data augmentation: Data augmentation is a technique that uses algorithms to generate additional data from limited data, thereby expanding the sample quantity and diversity. It can provide prior knowledge through data augmentation constraints to reduce the negative impact of irrelevant information features on the performance of deep learning models. In visual localization, traditional 2D image data augmentation methods include geometric transformations, color transformations, and pixel transformations. For fingerprint-based localization methods such as Wi-Fi and Bluetooth, traditional 1D sensor data are typically augmented by adding random noise to the fingerprint database. Currently, automatic data augmentation, data augmentation based on generative adversarial networks, and data augmentation methods combining autoencoders and generative adversarial networks are regarded as mature techniques for improving data quality.
- Uncertainty error modeling: Data fusion based on the KF plays a crucial role in indoor high-precision positioning. Data-driven deep learning models rely on statistical features rather than the physical description of the system and can learn and estimate the positioning system from input and output data. Therefore, combining deep learning algorithms with the Kalman filter allows for modeling and predicting errors [104,105]. For example, the GNSS/INS system tends to be a nonlinear system and does not follow any simple motion model when considering random errors, making error modeling challenging for micro-electro-mechanical systems (MEMS) sensors [106,107]. In typical applications, the position error from the inertial navigation system is combined with an error prediction algorithm based on neural networks to achieve external optimization of the Kalman filter. Additionally, deep learning algorithms can be adopted to generate the relationship between the Kalman filter gain and the observations within a multi-source fusion system, learning the propagation rules of signals. Aiming at changeable uncertainty errors provided by different location sources, this structure can provide more stable and accurate positioning results compared with existing approaches.
4.3. Popularization: Researching Low-Cost, Open, and Universal Technical Solution
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Rana, M.; Mittal, V. Wearable sensors for real-time kinematics analysis in sports: A review. IEEE Sens. J. 2020, 21, 1187–1207. [Google Scholar] [CrossRef]
- Li, X.; Huang, J.; Li, X.; Shen, Z.; Han, J.; Li, L.; Wang, B. Review of PPP–RTK: Achievements, challenges, and opportunities. Satell. Navig. 2022, 3, 28. [Google Scholar] [CrossRef]
- Kazmierski, K.; Zajdel, R.; Sośnica, K. Evolution of orbit and clock quality for real-time multi-GNSS solutions. GPS Solut. 2020, 24, 111. [Google Scholar] [CrossRef]
- Ruizhi, C.; Liang, C. Indoor Positioning with Smartphones: The State-of-the-art and the Challenges. Acta Geod. Cartogr. Sin. 2017, 46, 1316. [Google Scholar]
- Jang, B.; Kim, H. Indoor positioning technologies without offline fingerprinting map: A survey. IEEE Commun. Surv. Tutor. 2018, 21, 508–525. [Google Scholar] [CrossRef]
- Alliance, N. 5G White Paper. Next Generation Mobile Networks, White Paper, 2015, 1. Available online: https://ngmn.org/wp-content/uploads/NGMN_5G_White_Paper_V1_0.pdf (accessed on 20 September 2023).
- del Peral-Rosado, J.A.; Raulefs, R.; López-Salcedo, J.A.; Seco-Granados, G. Survey of cellular mobile radio localization methods: From 1G to 5G. IEEE Commun. Surv. Tutor. 2017, 20, 1124–1148. [Google Scholar] [CrossRef]
- Gao, K.; Wang, H.; Lv, H.; Liu, W. Toward 5G NR high-precision indoor positioning via channel frequency response: A new paradigm and dataset generation method. IEEE J. Sel. Areas Commun. 2022, 40, 2233–2247. [Google Scholar] [CrossRef]
- Harle, R. A Survey of Indoor Inertial Positioning Systems for Pedestrians. IEEE Commun. Surv. Tutor. 2013, 15, 1281–1293. [Google Scholar] [CrossRef]
- Yang, Z.; Wu, C.; Zhou, Z.; Zhang, X.; Wang, X.; Liu, Y. Mobility increases localizability: A survey on wireless indoor localization using inertial sensors. ACM Comput. Surv. (Csur) 2015, 47, 54. [Google Scholar] [CrossRef]
- Shang, J.; Hu, X.; Gu, F.; Wang, D.; Yu, S. Improvement Schemes for Indoor Mobile Location Estimation: A Survey. Math. Probl. Eng. 2015, 2015, 1–32. [Google Scholar] [CrossRef]
- Davidson, P.; Piche, R. A Survey of Selected Indoor Positioning Methods for Smartphones. IEEE Commun. Surv. Tutor. 2016, 19, 1347–1370. [Google Scholar] [CrossRef]
- Pei, L.; Zhang, M.; Zou, D.; Chen, R.; Chen, Y. A survey of crowd sensing opportunistic signals for indoor localization. Mob. Inf. Syst. 2016, 2016, 4041291. [Google Scholar] [CrossRef]
- Zafari, F.; Gkelias, A.; Leung, K.K. A survey of indoor localization systems and technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef]
- Gu, F.; Hu, X.; Ramezani, M.; Ramezani, M.; Acharya, D.; Khoshelham, K.; Valaee, S.; Shang, J. Indoor localization improved by spatial context—A survey. ACM Comput. Surv. (CSUR) 2019, 52, 1–35. [Google Scholar] [CrossRef]
- Guo, X.; Ansari, N.; Hu, F.; Shao, Y.; Elikplim, N.R.; Li, L. A survey on fusion-based indoor positioning. IEEE Commun. Surv. Tutor. 2019, 22, 566–594. [Google Scholar] [CrossRef]
- Alam, F.; Faulkner, N.; Parr, B. Device-free localization: A review of non-RF techniques for unobtrusive indoor positioning. IEEE Internet Things J. 2020, 8, 4228–4249. [Google Scholar] [CrossRef]
- Tiglao, N.M.; Alipio, M.; Cruz, R.D.; Bokhari, F.; Rauf, S.; Khan, S.A. Smartphone-based indoor localization techniques: State-of-the-art and classification. Measurement 2021, 179, 109349. [Google Scholar] [CrossRef]
- Farahsari, P.S.; Farahzadi, A.; Rezazadeh, J.; Bagheri, A. A survey on indoor positioning systems for IoT-based applications. IEEE Internet Things J. 2022, 9, 7680–7699. [Google Scholar] [CrossRef]
- Jang, B.; Kim, H.; wook Kim, J. Survey of landmark-based indoor positioning technologies. Inf. Fusion 2023, 89, 166–188. [Google Scholar] [CrossRef]
- Yu, Y.; Chen, R.; Chen, L.; Li, W.; Wu, Y.; Zhou, H. A robust seamless localization framework based on Wi-Fi FTM/GNSS and built-in sensors. IEEE Commun. Lett. 2021, 25, 2226–2230. [Google Scholar] [CrossRef]
- Ridolfi, M.; Kaya, A.; Berkvens, R.; Weyn, M.; Joseph, W.; Poorter, E.D. Self-calibration and collaborative localization for UWB positioning systems: A survey and future research directions. ACM Comput. Surv. (CSUR) 2021, 54, 1–27. [Google Scholar] [CrossRef]
- Xu, S.; Chen, R.; Guo, G.; Li, Z.; Qian, L.; Ye, F.; Huang, L. Bluetooth, floor-plan, and microelectromechanical systems-assisted wide-area audio indoor localization system: Apply to smartphones. IEEE Trans. Ind. Electron. 2021, 69, 11744–11754. [Google Scholar] [CrossRef]
- Liu, X.; Yao, Z.; Lu, M. A rapid convergent positioning algorithm based on projected cancellation technique for pseudolite positioning systems. GPS Solut. 2022, 26, 15. [Google Scholar] [CrossRef]
- Wen, F.; Kulmer, J.; Witrisal, K.; Wymeersch, H. 5G positioning and mapping with diffuse multipath. IEEE Trans. Wirel. Commun. 2020, 20, 1164–1174. [Google Scholar] [CrossRef]
- Hanley, D.; De Oliveira, A.S.D.; Zhang, X.; Kim, D.H.; Wei, Y.; Bretl, T. The impact of height on indoor positioning with magnetic fields. IEEE Trans. Instrum. Meas. 2021, 70, 8501719. [Google Scholar] [CrossRef]
- Rocamora, J.M.; Wang-Hei Ho, I.; Mak, W.M.; Lau, A.P.T. Survey of CSI fingerprinting-based indoor positioning and mobility tracking systems. IET Signal Process. 2020, 14, 407–419. [Google Scholar] [CrossRef]
- Maheepala, M.; Kouzani, A.Z.; Joordens, M.A. Light-based indoor positioning systems: A review. IEEE Sens. J. 2020, 20, 3971–3995. [Google Scholar] [CrossRef]
- Bai, N.; Tian, Y.; Liu, Y.; Yuan, Z.; Xiao, Z.; Zhou, J. A high-precision and low-cost IMU-based indoor pedestrian positioning technique. IEEE Sens. J. 2020, 20, 6716–6726. [Google Scholar] [CrossRef]
- He, M.; Zhu, C.; Huang, Q.; Ren, B.; Liu, J. A review of monocular visual odometry. Vis. Comput. 2020, 36, 1053–1065. [Google Scholar] [CrossRef]
- Calderaro, L.; Agnesi, C.; Dequal, D.; Vedovato, F.; Schiavon, M.; Santamato, A.; Villoresi, P. Towards quantum communication from global navigation satellite system. Quantum Sci. Technol. 2018, 4, 015012. [Google Scholar] [CrossRef]
- Chen, R.; Guo, G.; Chen, L.; NIU, X. Application Status, Development and Future Trend of High-Precision Indoor Navigation and Tracking. Geomat. Inf. Sci. Wuhan Univ. 2023, 48, 1591–1600. [Google Scholar]
- Li, Y.; Zhuang, Y.; Hu, X.; Gao, Z.; Hu, J.; Chen, L.; El-Sheimy, N. Toward location-enabled IoT (LE-IoT): IoT positioning techniques, error sources, and error mitigation. IEEE Internet Things J. 2020, 8, 4035–4062. [Google Scholar] [CrossRef]
- IEEE Standard for Information Technology—Telecommunications and Information Exchange between Systems. Local and Metropolitan Area Networks—Specific Requirements—Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications. In IEEE Std 802.11 (2016) (Revision of IEEE Std 802.11-2012); IEEE: New York, NY, USA, 2016; pp. 1–3534.
- Yu, Y.; Chen, R.; Liu, Z.; Guo, G.; Ye, F.; Chen, L. Wi-Fi fine time measurement: Data analysis and processing for indoor localisation. J. Navig. 2020, 73, 1106–1128. [Google Scholar] [CrossRef]
- Yu, Y.; Chen, R.; Chen, L.; Guo, G.; Ye, F.; Liu, Z. A robust dead reckoning algorithm based on Wi-Fi FTM and multiple sensors. Remote Sens. 2019, 11, 504. [Google Scholar] [CrossRef]
- Niesen, U.; Ekambaram, V.N.; Jose, J.; Wu, X. Intervehicle range estimation from periodic broadcasts. IEEE Trans. Veh. Technol. 2017, 66, 10637–10646. [Google Scholar] [CrossRef]
- Dvorecki, N.; Bar-Shalom, O.; Banin, L.; Amizur, Y. A machine learning approach for Wi-Fi RTT ranging. In Proceedings of the 2019 International Technical Meeting of the Institute of Navigation, Reston, VA, USA, 28–31 January 2019; pp. 435–444. [Google Scholar]
- Martin-Escalona, I.; Zola, E. Improving Fingerprint-Based Positioning by Using IEEE 802.11 mc FTM/RTT Observables. Sensors 2022, 23, 267. [Google Scholar] [CrossRef] [PubMed]
- Feng, X.; Nguyen, K.A.; Luo, Z. Wifi access points line-of-sight detection for indoor positioning using the signal round trip time. Remote Sens. 2022, 14, 6052. [Google Scholar] [CrossRef]
- Yu, Y.; Chen, R.; Chen, L.; Xu, S.; Li, W.; Wu, Y.; Zhou, H. Precise 3-D indoor localization based on Wi-Fi FTM and built-in sensors. IEEE Internet Things J. 2020, 7, 11753–11765. [Google Scholar] [CrossRef]
- Ruiz, A.R.J.; Granja, F.S. Comparing ubisense, bespoon, and decawave uwb location systems: Indoor performance analysis. IEEE Trans. Instrum. Meas. 2017, 66, 2106–2117. [Google Scholar] [CrossRef]
- Jiménez, A.R.; Seco, F. Comparing Decawave and Bespoon UWB location systems: Indoor/outdoor performance analysis. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–8. [Google Scholar]
- Djaja-Josko, V.; Kolakowski, J. A new method for wireless synchronization and TDOA error reduction in UWB positioning system. In Proceedings of the 2016 21st International Conference on Microwave, Radar and Wireless Communications (MIKON), Krakow, Poland, 9–11 May 2016; pp. 1–4. [Google Scholar]
- Gentner, C.; Ulmschneider, M. Simultaneous localization and mapping for pedestrians using low-cost ultra-wideband system and gyroscope. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–8. [Google Scholar]
- Jiang, C.; Shen, J.; Chen, S.; Chen, Y.; Liu, D.; Bo, Y. NLOS/LOS Classification Using Deep Learning Method. IEEE Commun. Lett. 2020, 24, 2226–2230. [Google Scholar] [CrossRef]
- Chen, R.; Li, Z.; Ye, F.; Guo, G.; Xu, S.; Qian, L.; Huang, L. Precise indoor positioning based on acoustic ranging in smartphone. IEEE Trans. Instrum. Meas. 2021, 70, 9509512. [Google Scholar] [CrossRef]
- Höflinger, F.; Zhang, R.; Hoppe, J.; Bannoura, A.; Reindl, L.M.; Wendeberg, J.; Bührer, M.; Schindelhauer, C. Acoustic self-calibrating system for indoor smartphone tracking (assist). In Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, NSW, Australia, 13–15 November 2012; pp. 1–9. [Google Scholar]
- Zhang, L.; Chen, M.; Wang, X.; Wang, Z. TOA estimation of chirp signal in dense multipath environment for low-cost acoustic ranging. IEEE Trans. Instrum. Meas. 2018, 68, 355–367. [Google Scholar] [CrossRef]
- Li, Z.; Chen, R.; Guo, G.; Ye, F.; Qian, L.; Xu, S.; Chen, L. Dual-Step Acoustic Chirp Signals Detection using Pervasive Smartphones in Multipath and NLOS Indoor Environments. IEEE Internet Things J. 2023. [Google Scholar] [CrossRef]
- Parkinson, B.W.; Enge, P.; Axelrad, P.; Spilker, J.J., Jr. Global Positioning System: Theory and Applications Volume I; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 1996. [Google Scholar]
- Rizos, C.; Roberts, G.; Barnes, J.; Gambale, N. Experimental results of Locata: A high accuracy indoor positioning system. In Proceedings of the 2010 Inter-national Conference on Indoor Positioning and Indoor Navigation, Zurich, Switzerland, 15–17 September 2010; pp. 1–7. [Google Scholar]
- Wan, X. Research on Pseudolite Positioning Technique. Ph.D. Thesis, Shanghai Jiaotong University, Shanghai, China, 2011. [Google Scholar]
- Xu, R.; Chen, W.; Xu, Y.; Ji, S. A new indoor positioning system architecture using GPS signals. Sensors 2015, 15, 10074–10087. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Zhang, P.; Guo, J.; Wang, J.; Qiu, W. A new method for single-epoch ambiguity resolution with indoor pseudolite positioning. Sensors 2017, 17, 921. [Google Scholar] [CrossRef]
- Zhao, Y.; Guo, J.; Zhang, P. Application and Accuracy Analysis of RTK Technology in Indoor Pseudo-Satellite System. In Proceedings of the China Satellite Navigation Conference, Harbin, China, 23 May 2018. [Google Scholar]
- Shahmansoori, A.; Garcia, G.E.; Destino, G.; Seco-Granados, G.; Wymeersch, H. 5G position and orientation estimation through millimeter wave MIMO. In Proceedings of the 2015 IEEE Globecom Workshops (GC Wkshps), San Diego, CA, USA, 6–10 December 2015; pp. 1–6. [Google Scholar]
- Abu-Shaban, Z.; Zhou, X.; Abhayapala, T.; Seco-Granados, G.; Wymeersch, H. Error bounds for uplink and downlink 3D localization in 5G millimeter wave systems. IEEE Trans. Wirel. Commun. 2018, 17, 4939–4954. [Google Scholar] [CrossRef]
- Wan, L.; Han, G.; Shu, L.; Feng, N. The critical patients localization algorithm using sparse representation for mixed signals in emergency healthcare system. IEEE Syst. J. 2015, 12, 52–63. [Google Scholar] [CrossRef]
- Wang, P.; Pajovic, M.; Orlik, P.V.; Koike-Akino, T.; Kim, K.J.; Fang, J. Sparse channel estimation in millimeter wave communications: Exploiting joint AoD-AoA angular spread. In Proceedings of the 2017 IEEE International conference on communications (ICC), Paris, France, 21–25 May 2017; pp. 1–6. [Google Scholar]
- GB/T 36628.4-2019. Available online: https://openstd.samr.gov.cn/bzgk/gb/newGbInfo?hcno=047BBF8151BBA2671B49659270258F52 (accessed on 20 September 2023).
- Luo, J.; Fan, L.; Li, H. Indoor positioning systems based on visible light communication: State of the art. IEEE Commun. Surv. Tutor. 2017, 19, 2871–2893. [Google Scholar] [CrossRef]
- Afzalan, M.; Jazizadeh, F. Indoor positioning based on visible light communication: A performance-based survey of real-world prototypes. ACM Comput. Surv. (CSUR) 2019, 52, 1–36. [Google Scholar] [CrossRef]
- Tran, H.Q.; Ha, C. Machine learning in indoor visible light positioning systems: A review. Neurocomputing 2022, 491, 117–131. [Google Scholar] [CrossRef]
- Sun, X.; Duan, J.; Zou, Y.; Shi, A. Impact of multipath effects on theoretical accuracy of TOA-based indoor VLC positioning system. Photonics Res. 2015, 3, 296–299. [Google Scholar] [CrossRef]
- Do, T.H.; Hwang, J.; Yoo, M. TDoA based indoor visible light positioning systems. In Proceedings of the 2013 Fifth International Conference on Ubiquitous and Future Networks (ICUFN), Da Nang, Vietnam, 2–5 July 2013; pp. 456–458. [Google Scholar]
- Hong, C.Y.; Wu, Y.C.; Liu, Y.; Chow, C.W.; Yeh, C.H.; Hsu, K.L.; Chen, Y.Y. Angle-of-arrival (AOA) visible light positioning (VLP) system using solar cells with third-order regression and ridge regression algorithms. IEEE Photonics J. 2020, 12, 7902605. [Google Scholar] [CrossRef]
- Xie, C.; Guan, W.; Wu, Y.; Fang, L.; Cai, Y. The LED-ID detection and recognition method based on visible light positioning using proximity method. IEEE Photonics J. 2018, 10, 7902116. [Google Scholar] [CrossRef]
- Yan, J.; Zhu, B.; Chen, L.; Wang, J.; Liu, J. Error analysis on indoor localization with visible light communication. Remote Sens. 2019, 11, 427. [Google Scholar] [CrossRef]
- Ji, Y.Q.; Xiao, C.X.; Gao, J.; Ni, J.; Cheng, H.; Zhang, P.; Sun, G. A single LED lamp positioning system based on CMOS camera and visible light communication. Opt. Commun. 2019, 443, 48–54. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, P.; Chen, Z. An improved particle filter for mobile robot localization based on particle swarm optimization. Expert Syst. Appl. 2019, 135, 181–193. [Google Scholar] [CrossRef]
- Haverinen, J.; Kemppainen, A. Global indoor self-localization based on the ambient magnetic field. Robot. Auton. Syst. 2009, 57, 1028–1035. [Google Scholar] [CrossRef]
- Jiapeng, Z.; Yunjia, W.; Xin, L.I.; Xiaoxiang, C.; Hongji, C.A.O. Research on geomagnetic indoor positioning technology. Bull. Surv. Mapp. 2019, 18–22. [Google Scholar]
- Sun, Y.; Gong, P.; Xu, Z. A Novel Indoor Positioning Based on Geomagnetic Trajectory Signal. J. Signal Process. 2021, 37, 952–957. [Google Scholar]
- Halperin, D.; Hu, W.; Sheth, A.; Wetherall, D. Tool release: Gathering 802.11 n traces with channel state information. ACM SIGCOMM Comput. Commun. Rev. 2011, 41, 53. [Google Scholar] [CrossRef]
- Wu, K.; Xiao, J.; Yi, Y.; Chen, D.; Luo, X.; Ni, L.M. CSI-based indoor localization. IEEE Trans. Parallel Distrib. Syst. 2012, 24, 1300–1309. [Google Scholar] [CrossRef]
- Wang, Y.; Xiu, C.; Zhang, X.; Yang, D. Wi-Fi indoor localization with CSI fingerprinting-based random forest. Sensors 2018, 18, 2869. [Google Scholar] [CrossRef] [PubMed]
- Ding, J.; Wang, Y.; Si, H.; Gao, S.; Xing, J. Three-dimensional indoor localization and tracking for mobile target based on wifi sensing. IEEE Internet Things J. 2022, 9, 21687–21701. [Google Scholar] [CrossRef]
- Yu, Y.; Shi, W.; Chen, R.; Chen, L.; Bao, S.; Chen, P. Map-Assisted Seamless Localization Using Crowdsourced Trajectories Data and Bi-LSTM Based Quality Control Criteria. IEEE Sens. J. 2022, 22, 16481–16491. [Google Scholar] [CrossRef]
- Foxlin, E. Pedestrian tracking with shoe-mounted inertial sensors. IEEE Comput. Graph. Appl. 2005, 25, 38–46. [Google Scholar] [CrossRef] [PubMed]
- Liu, T.; Kuang, J.; Ge, W.; Zhang, P.; Niu, X. A simple positioning system for large-scale indoor patrol inspection using foot-mounted INS, QR code control points, and smartphone. IEEE Sens. J. 2020, 21, 4938–4948. [Google Scholar] [CrossRef]
- Kuang, J.; Niu, X.; Chen, X. Robust pedestrian dead reckoning based on MEMS-IMU for smartphones. Sensors 2018, 18, 1391. [Google Scholar] [CrossRef]
- Qi, L.; Yu, Y.; Liu, Y.; Gao, C.; Feng, T.; Hui, J.; Wang, S. A Robust Foot-Mounted Positioning System Based on Dual IMU Data and Ultrasonic Ranging. IEEE Sens. J. 2023, 23, 4085–4095. [Google Scholar] [CrossRef]
- Niu, X.; Liu, T.; Kuang, J.; Zhang, Q.; Guo, C. Pedestrian trajectory estimation based on foot-mounted inertial navigation system for multistory buildings in postprocessing mode. IEEE Internet Things J. 2021, 9, 6879–6892. [Google Scholar] [CrossRef]
- Kazerouni, I.A.; Fitzgerald, L.; Dooly, G.; Toal, D. A survey of state-of-the-art on visual, S.L.A.M. Expert Syst. Appl. 2022, 205, 117734. [Google Scholar] [CrossRef]
- Bao, S.; Shi, W.; Chen, P.; Xiang, H.; Yu, Y. A systematic mapping framework for backpack mobile mapping system in common monotonous environments. Measurement 2022, 197, 111243. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, Q.; Li, J.; Zhang, S.; Liu, J. A computationally efficient semantic slam solution for dynamic scenes. Remote Sens. 2019, 11, 1363. [Google Scholar] [CrossRef]
- Kasiselvanathan, M.; Sangeetha, V.; Kalaiselvi, A. Palm pattern recognition using scale invariant feature transform. Int. J. Intell. Sustain. Comput. 2020, 1, 44–52. [Google Scholar] [CrossRef]
- Newcombe, R.A.; Lovegrove, S.J.; Davison, A.J. DTAM: Dense tracking and mapping in real-time. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 2320–2327. [Google Scholar]
- Engel, J.; Schöps, T.; Cremers, D. LSD-SLAM: Large-scale direct monocular SLAM. In European Conference on Computer Vision; Springer International Publishing: Cham, Switzerland, 2014; pp. 834–849. [Google Scholar]
- Chen, Y.; Chen, R.; Liu, M.; Xiao, A.; Wu, D.; Zhao, S. Indoor visual positioning aided by CNN-based image retrieval: Training-free, 3D modeling-free. Sensors 2018, 18, 2692. [Google Scholar] [CrossRef] [PubMed]
- Giovannetti, V.; Lloyd, S.; Maccone, L. Quantum-enhanced positioning and clock synchronization. Nature 2001, 412, 417–419. [Google Scholar] [CrossRef] [PubMed]
- Sharma, V.; Banerjee, S. Analysis of atmospheric effects on satellite-based quantum communication: A comparative study. Quantum Inf. Process. 2019, 18, 67. [Google Scholar] [CrossRef]
- Wang, Z.; Malaney, R.; Burnett, B. Satellite-to-earth quantum key distribution via orbital angular momentum. Phys. Rev. Appl. 2020, 14, 064031. [Google Scholar] [CrossRef]
- Wang, Z.; Yang, X.; Deng, Y. Research on the Near-Earth Spacecraft Quantum Positioning Determinacy Algorithm. Flight Dyn. 2015, 6, 551–554. [Google Scholar]
- Tennstedt, B.; Rajagopalan, A.; Weddig, N.B.; Abend, S.; Schön, S.; Rasel, E.M. Atom Strapdown: Toward Integrated Quantum Inertial Navigation Systems. NAVIGATION J. Inst. Navig. 2023, 70, navi.604. [Google Scholar] [CrossRef]
- Song, P.; Ma, J.; Ma, Z.; Zhang, S.; Si, C.; Han, G. Research and Development Status of Quantum Navigation Technology. Laser Optoelectron. Prog. 2018, 55, 29–43. [Google Scholar]
- Ren, Z.; Miao, Q.; Wu, D. Navigation Angle Measurement Scheme Based on Hybrid Entangled Quantum Signal. Acta Opt. Sin. 2022, 42, 244–252. [Google Scholar]
- Yang, S.; Liu, J.; Gong, X.; Huang, G.; Bai, Y. A robust heading estimation solution for smartphone multi-sensor integrated indoor positioning. IEEE Internet Things J. 2021, 8, 17186–17198. [Google Scholar] [CrossRef]
- Cheng, L.; Li, Y.; Xue, M.; Wang, Y. An indoor localization algorithm based on modified joint probabilistic data association for wireless sensor network. IEEE Trans. Ind. Inform. 2020, 17, 63–72. [Google Scholar] [CrossRef]
- Yu, Y.; Chen, R.; Chen, L.; Li, W.; Wu, Y.; Zhou, H. H-WPS: Hybrid wireless positioning system using an enhanced wi-fi FTM/RSSI/MEMS sensors integration approach. IEEE Internet Things J. 2021, 9, 11827–11842. [Google Scholar] [CrossRef]
- Xu, S.; Chen, R.; Yu, Y.; Guo, G.; Huang, L. Locating smartphones indoors using built-in sensors and Wi-Fi ranging with an enhanced particle filter. IEEE Access 2019, 7, 95140–95153. [Google Scholar] [CrossRef]
- Wu, C.; Zhang, F.; Wang, B.; Liu, K.R. EasiTrack: Decimeter-level indoor tracking with graph-based particle filtering. IEEE Internet Things J. 2019, 7, 2397–2411. [Google Scholar] [CrossRef]
- Bai, X.; Wen, W.; Zhang, G.; Ng, H.F.; Hsu, L.T. GNSS Outliers Mitigation in Urban Areas Using Sparse Estimation Based on Factor Graph Optimization. In Proceedings of the 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), Macau, China, 8–12 October 2022; pp. 197–202. [Google Scholar]
- Liu, Z.; Shi, W.; Yu, Y.; Chen, P.; Chen, B.Y. A LSTM-based approach for modelling the movement uncertainty of indoor trajectories with mobile sensing data. Int. J. Appl. Earth Obs. Geoinf. 2022, 108, 102758. [Google Scholar] [CrossRef]
- Shi, W.; Yu, Y.; Liu, Z.; Chen, R.; Chen, L. A deep-learning approach for modelling pedestrian movement uncertainty in large-scale indoor areas. Int. J. Appl. Earth Obs. Geoinf. 2022, 114, 103065. [Google Scholar] [CrossRef]
- Wang, B.; Liu, J.; Deng, Z.; Fu, M. A model-free calibration method of inertial navigation system and Doppler sensors. IEEE Sens. J. 2020, 21, 2219–2229. [Google Scholar] [CrossRef]
- Ye, H.; Yang, B.; Long, Z.; Dai, C. A method of indoor positioning by signal fitting and PDDA algorithm using BLE AOA device. IEEE Sens. J. 2022, 22, 7877–7887. [Google Scholar] [CrossRef]
- Huang, C.; Zhuang, Y.; Liu, H.; Li, J.; Wang, W. A performance evaluation framework for direction finding using BLE AoA/AoD receivers. IEEE Internet Things J. 2020, 8, 3331–3345. [Google Scholar] [CrossRef]
- Margiani, T.; Cortesi, S.; Keller, M.; Vogt, C.; Polonelli, T.; Magno, M. Angle of Arrival and Centimeter Distance Estimation on a Smart UWB Sensor Node. IEEE Trans. Instrum. Meas. 2023, 72, 9508110. [Google Scholar] [CrossRef]
- Han, S.; Yoo, H.; Choo, H.; Jang, B.J. IEEE 802.15. 4z UWB Angle of Departure Tag Design for Indoor Positioning. In Proceedings of the 2023 53rd European Microwave Conference (EuMC), Berlin, Germany, 19–21 September 2023; pp. 975–978. [Google Scholar]
- Kraljević, L.; Russo, M.; Stella, M.; Sikora, M. Free-field TDOA-AOA sound source localization using three soundfield microphones. IEEE Access 2020, 8, 87749–87761. [Google Scholar] [CrossRef]
- Fischer, G.; Bordoy, J.; Schott, D.J.; Xiong, W.; Gabbrielli, A.; Höflinger, F.; Rupitsch, S.J. Multimodal indoor localization: Fusion possibilities of ultrasonic and bluetooth low-energy data. IEEE Sens. J. 2022, 22, 5857–5868. [Google Scholar] [CrossRef]
- Dou, Z.; Yao, Z.; Zhang, Z.; Lu, M. A Lidar-assisted Self-localization Technology for Indoor Wireless Sensor Networks. IEEE Internet Things J. 2023, 10, 17515–17529. [Google Scholar] [CrossRef]
- Shastri, A.; Valecha, N.; Bashirov, E.; Tataria, H.; Lentmaier, M.; Tufvesson, F.; Casari, P. A review of millimeter wave device-based localization and device-free sensing technologies and applications. IEEE Commun. Surv. Tutor. 2022, 24, 1708–1749. [Google Scholar] [CrossRef]
- Hu, Z.; Yuan, J.; Gao, Y.; Wang, B.; Zhang, X. NALO-VOM: Navigation-Oriented LiDAR-Guided Monocular Visual Odometry and Mapping for Unmanned Ground Vehicles. IEEE Trans. Intell. Veh. 2023, 1–12. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Year | Methods | Meter-Level Accuracy Involved |
|---|---|---|---|
| Harle et al. [9] | 2013 | Dead reckoning | Partly |
| Yang et al. [10] | 2015 | Ranging, fingerprinting, dead reckoning | Partly |
| Shang et al. [11] | 2015 | Ranging, fingerprinting, dead reckoning, fusion-based | Partly |
| Davidson et al. [12] | 2016 | Ranging, fingerprinting, dead reckoning | Partly |
| Pei et al. [13] | 2016 | Ranging, dead reckoning, fusion-based | Partly |
| Zafari et al. [14] | 2017 | Ranging, fingerprinting | Partly |
| Gu et al. [15] | 2018 | Spatial constraints | Partly |
| Guo et al. [16] | 2019 | Fusion-based method | Partly |
| Alam et al. [17] | 2020 | Visible light, IR, physical excitation, electric field | Partly |
| Tiglao et al. [18] | 2021 | Wireless-based method | Partly |
| Farahsari et al. [19] | 2022 | Communication-based method | Partly |
| Jang et al. [20] | 2023 | Landmark-based method | Partly |
| This paper | 2023 | Geometry, fingerprinting, incrementation, quantum navigation | Wholly |
| Positioning Principles | Positioning Technologies | Typical Coverage | Robustness | Calculation Complexity | Scalability | Cost |
|---|---|---|---|---|---|---|
| Lateration/Angulation | Wi-Fi-RTT [21,34,35,36,37,38,39,40,41] | 30–50 m | Affected by multipath propagation, NLOS, and user capacity; | Low | Easy | No additional cost |
| UWB [22,42,43,44,45,46] | 30–50 m | Prone to elec-tromagnetic interference and NLOS; | Medium | Medium | High | |
| Acoustic [23,47,48,49,50] | 30–50 m | Prone to multipath and NLOS interference; | Medium | Easy | Medium | |
| Pseudolites [51,52,53,54,55,56] | 10–1000 m | Has problems with clock synchronization, multipath, and near–far interference; | High | Medium | High | |
| Visible Light [28,62,63,64,65,66,67,68,69,70] | 10–50 m | Affected by NLOS; | Medium | Easy | High | |
| 5G [57,58,59,60] | 50–200 m | Affected by multipath propagation and NLOS; | Medium | Easy | Relatively high deployment cost | |
| Fingerprint Matching | Magnetic Field [71,72,73,74] | Do not require local stations | Not affected by obstacles but is time-consuming and labor-intensive; | High | Easy | Low |
| CSI [75,76,77,78] | 10–50 m | Time-consuming and labor-intensive; | High | Medium | High | |
| Incremental Estimation | Inertial Navigation [79,80,81,82,83,84] | Do not require local stations | Limited by cumulative error and complex motion modes; | Medium | Easy | Low |
| Visual Odometry [85,86,87,88,89,90,91] | Do not require local stations | Limited by cumulative error and complex motion modes; | Very High | Easy | Medium | |
| Quantum Navigation | Quantum Navigation [92,93,94,95,96,97,98] | Supports both active positioning and passive positioning | Enhanced information transmission security and accuracy. | Very High | Easy | High |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qi, L.; Liu, Y.; Yu, Y.; Chen, L.; Chen, R. Current Status and Future Trends of Meter-Level Indoor Positioning Technology: A Review. Remote Sens. 2024, 16, 398. https://doi.org/10.3390/rs16020398
Qi L, Liu Y, Yu Y, Chen L, Chen R. Current Status and Future Trends of Meter-Level Indoor Positioning Technology: A Review. Remote Sensing. 2024; 16(2):398. https://doi.org/10.3390/rs16020398
Chicago/Turabian StyleQi, Lin, Yu Liu, Yue Yu, Liang Chen, and Ruizhi Chen. 2024. "Current Status and Future Trends of Meter-Level Indoor Positioning Technology: A Review" Remote Sensing 16, no. 2: 398. https://doi.org/10.3390/rs16020398
APA StyleQi, L., Liu, Y., Yu, Y., Chen, L., & Chen, R. (2024). Current Status and Future Trends of Meter-Level Indoor Positioning Technology: A Review. Remote Sensing, 16(2), 398. https://doi.org/10.3390/rs16020398