


Assessment of FY-3E GNOS II Radio Occultation Data Using an Improved Three-Cornered Hat Method

 , , ,
, , ,  , , , add
Show full author list
, , , add
Show full author list
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Data Description
2.1. Model Data
2.2. Radiosonde Data
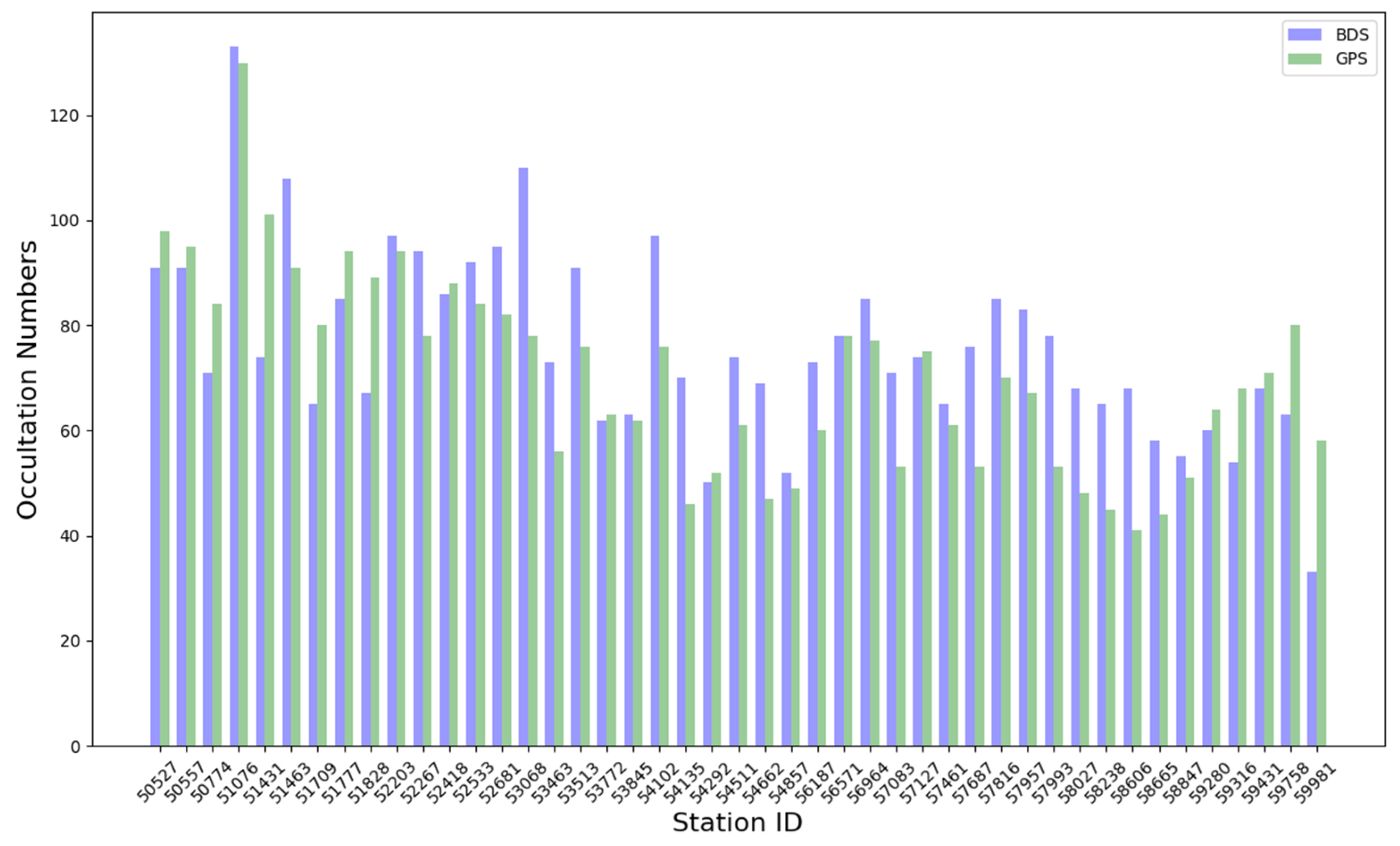
2.3. FY-3E GNOS II RO Data
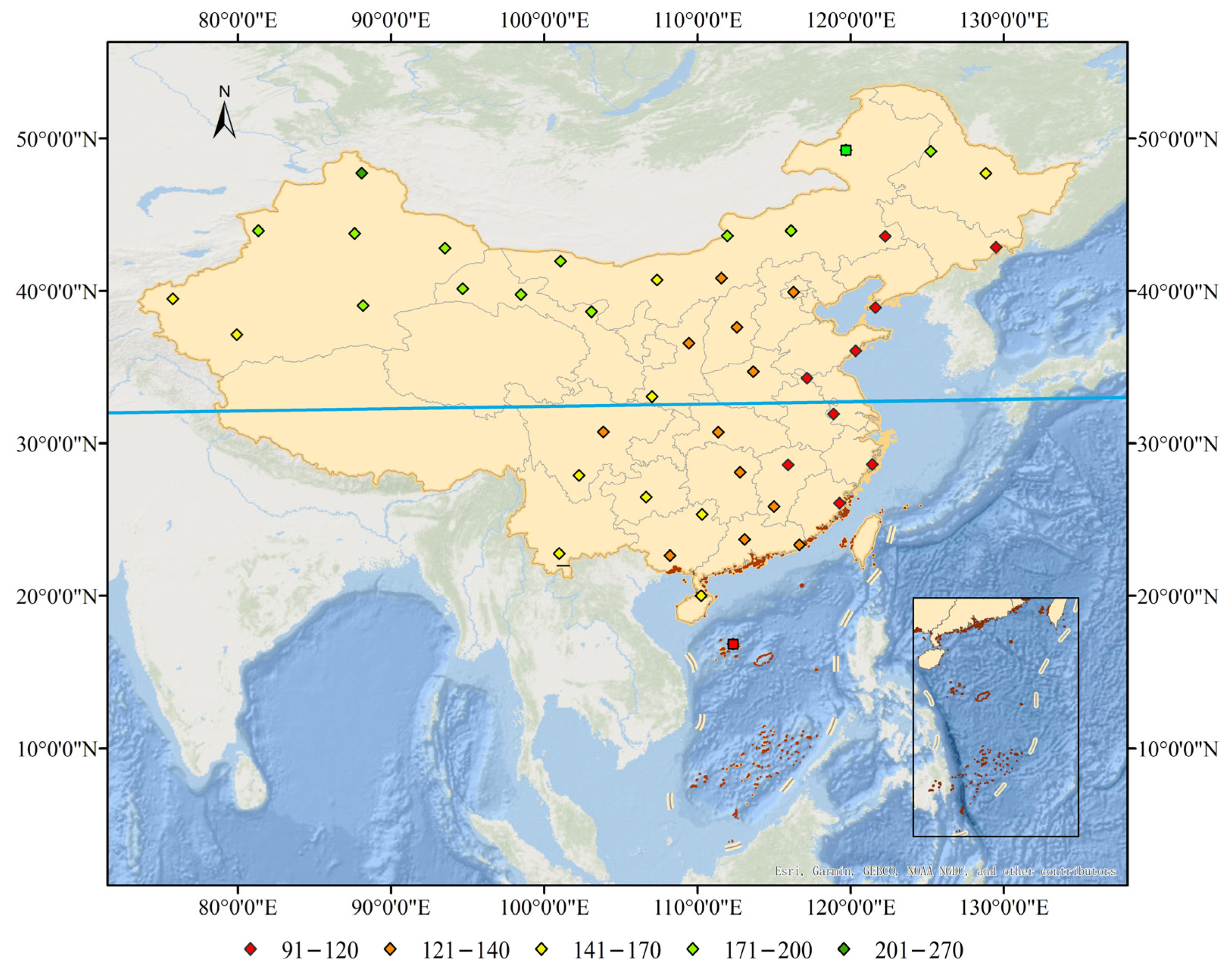
2.4. Co-Location of the Datasets
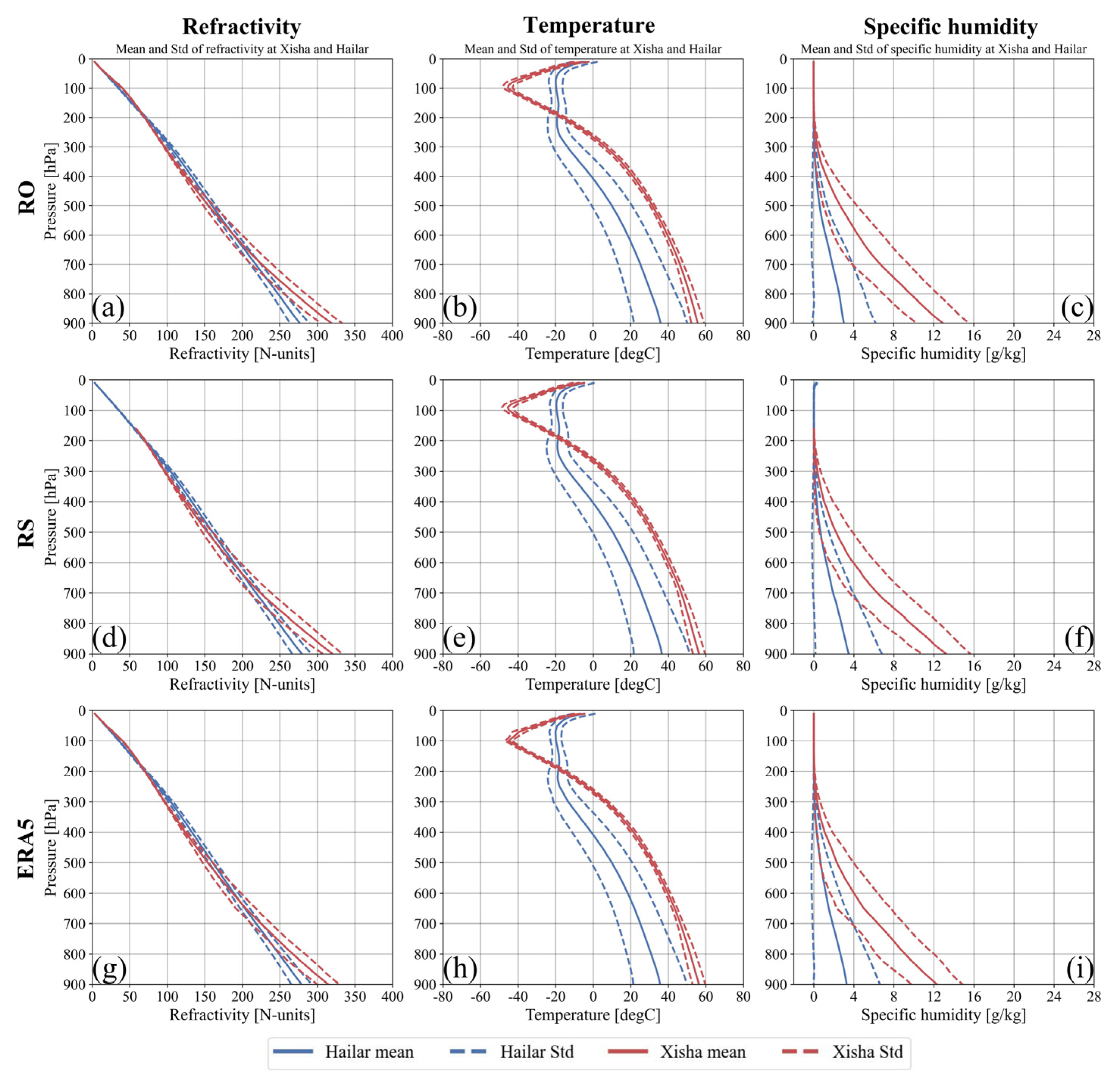
2.5. Mean Atmospheric Profiles
3. Assessment Methods
3.1. Spatial–Temporal Sampling Correction Algorithm
3.2. Three-Cornered Hat Algorithm
3.3. Experimental Programs
- (1)
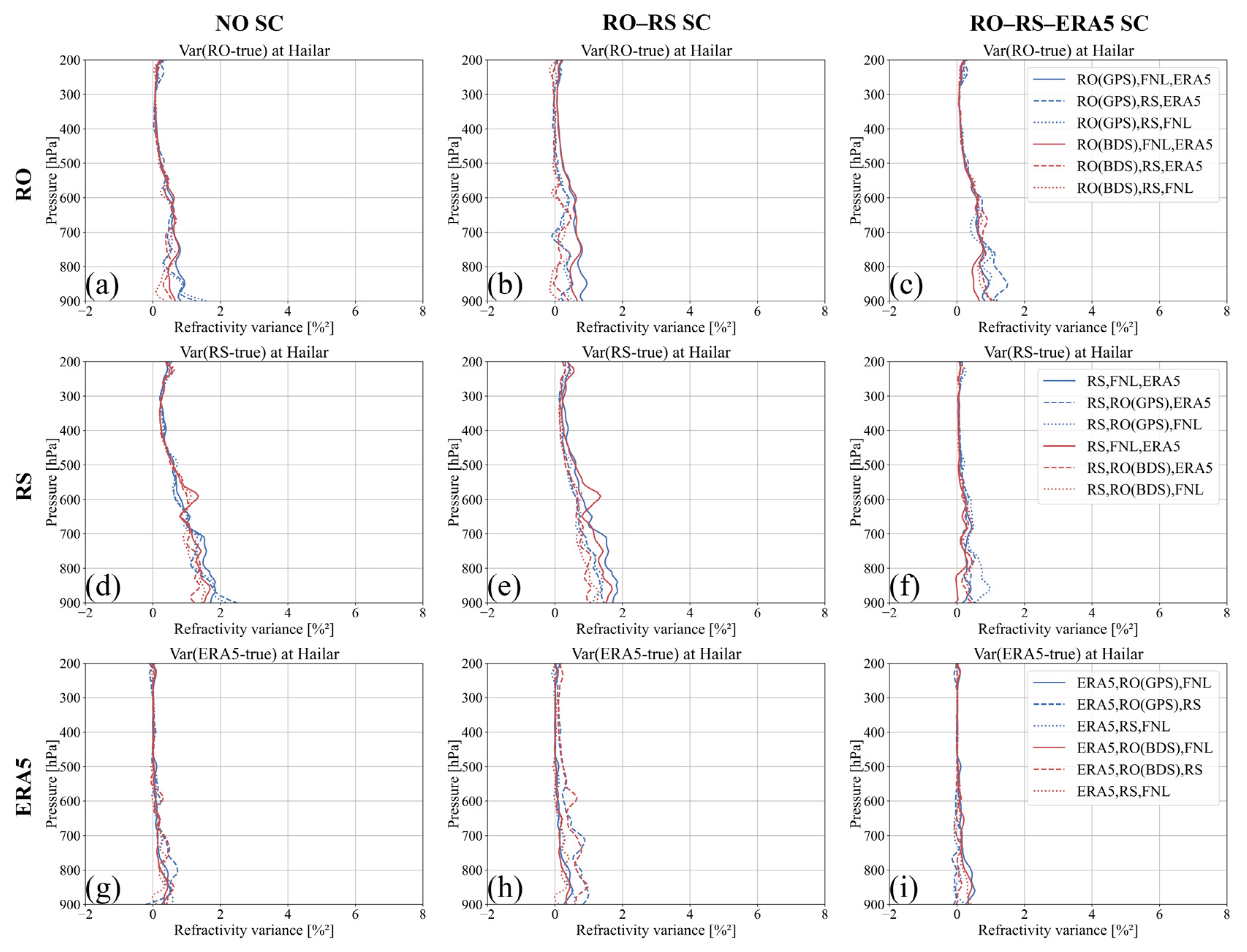
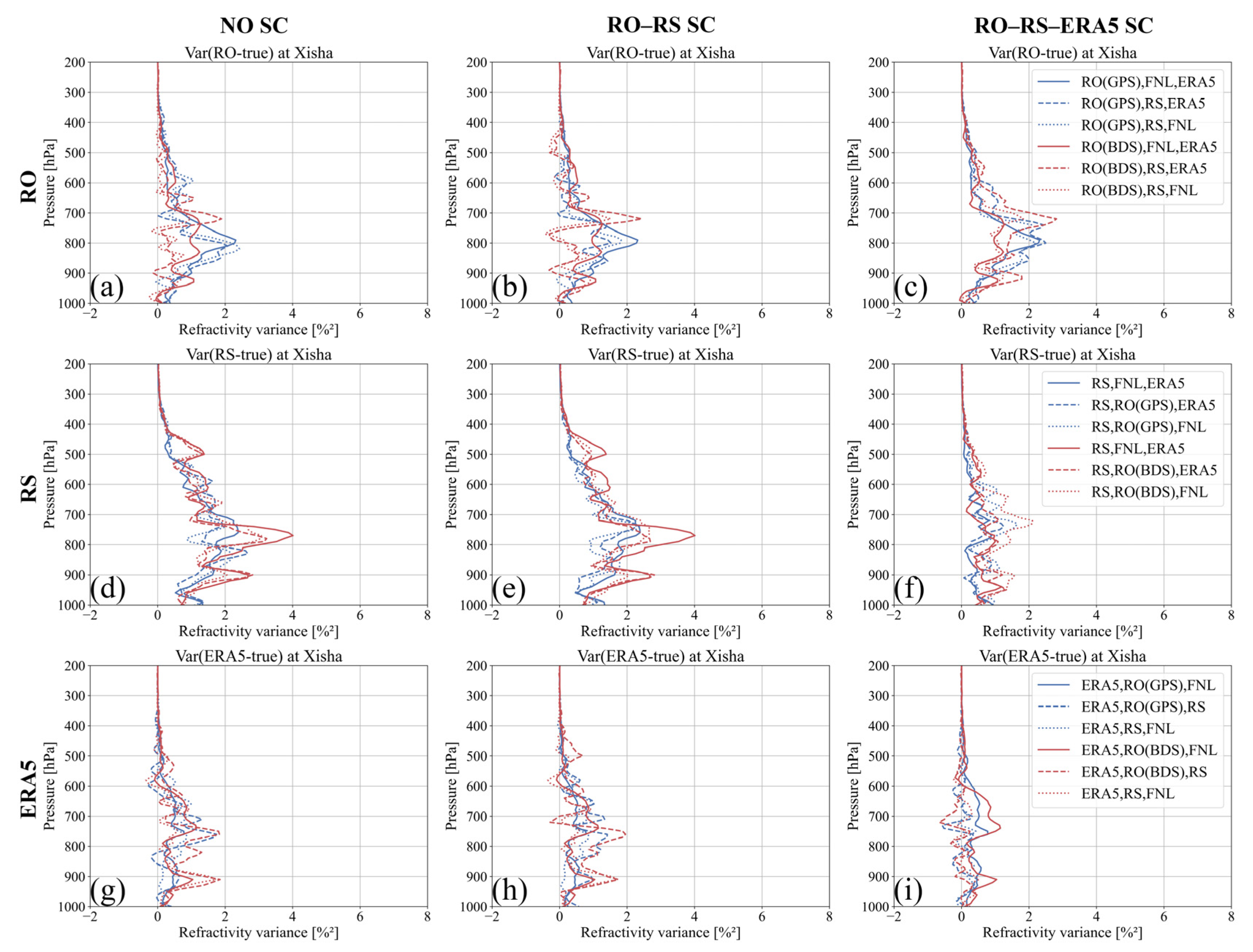
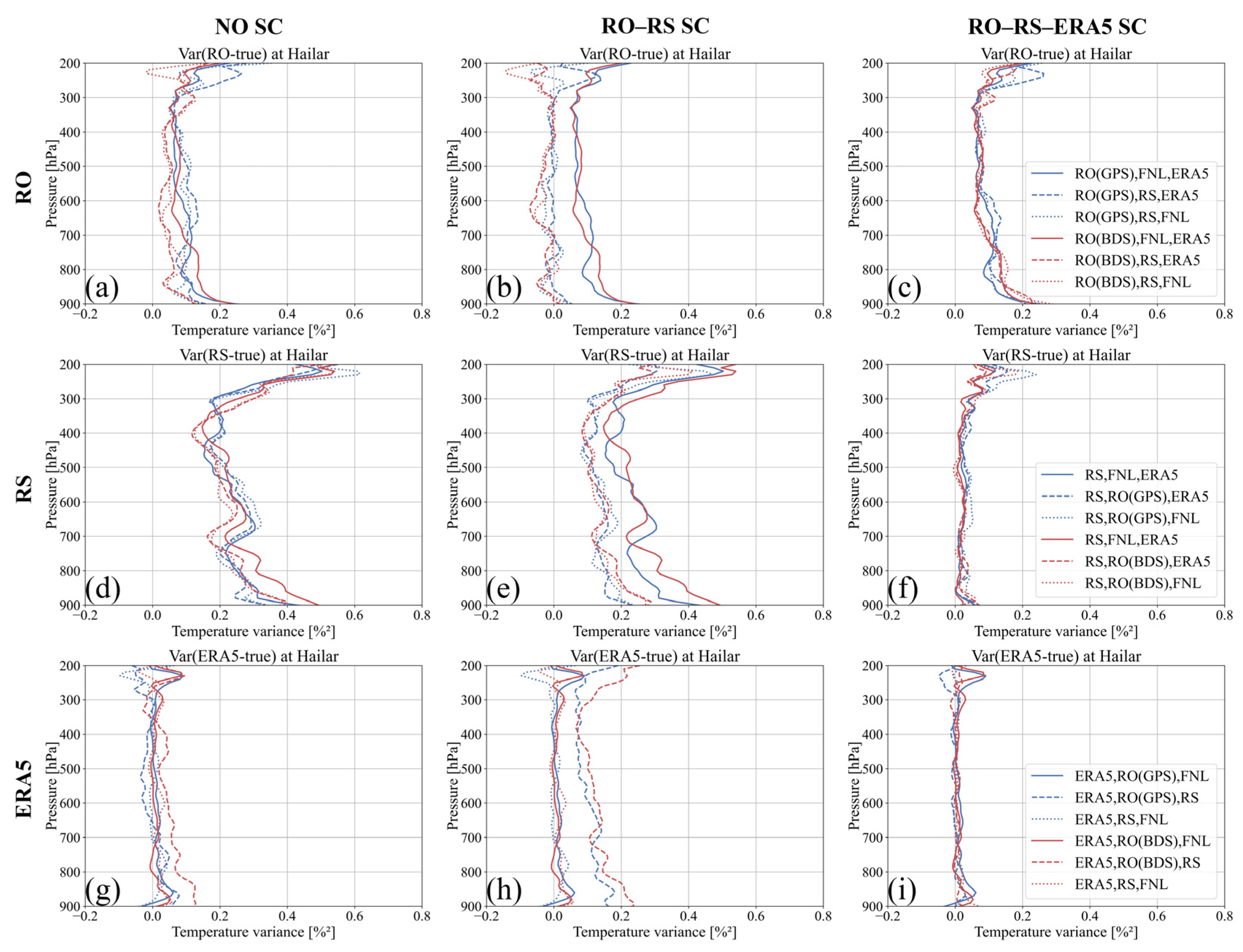
- There were three experimental groups: no spatial–temporal sampling correction (NO SC), spatial–temporal sampling correction for RO–RS co-located pairs (RO–RS SC), and spatial–temporal sampling correction for both RO–RS and RS–model co-located pairs (RO–RS–ERA5 SC) data groups. These were calculated using the 3CH algorithm. We performed no sampling correction, only RO–RS sampling correction, and both RO–RS and RS–model sampling correction, respectively. In each data group, the error variances of refractivity, temperature, and specific humidity data for the RO, RS, and ERA5 datasets were computed using data from China’s northernmost RS station, Hailar, and the southernmost station, Xisha. Then, according to the results, we evaluated the impact of each correction scheme on the 3CH error variances and chose the best 3CH data processing chain.
- (2)
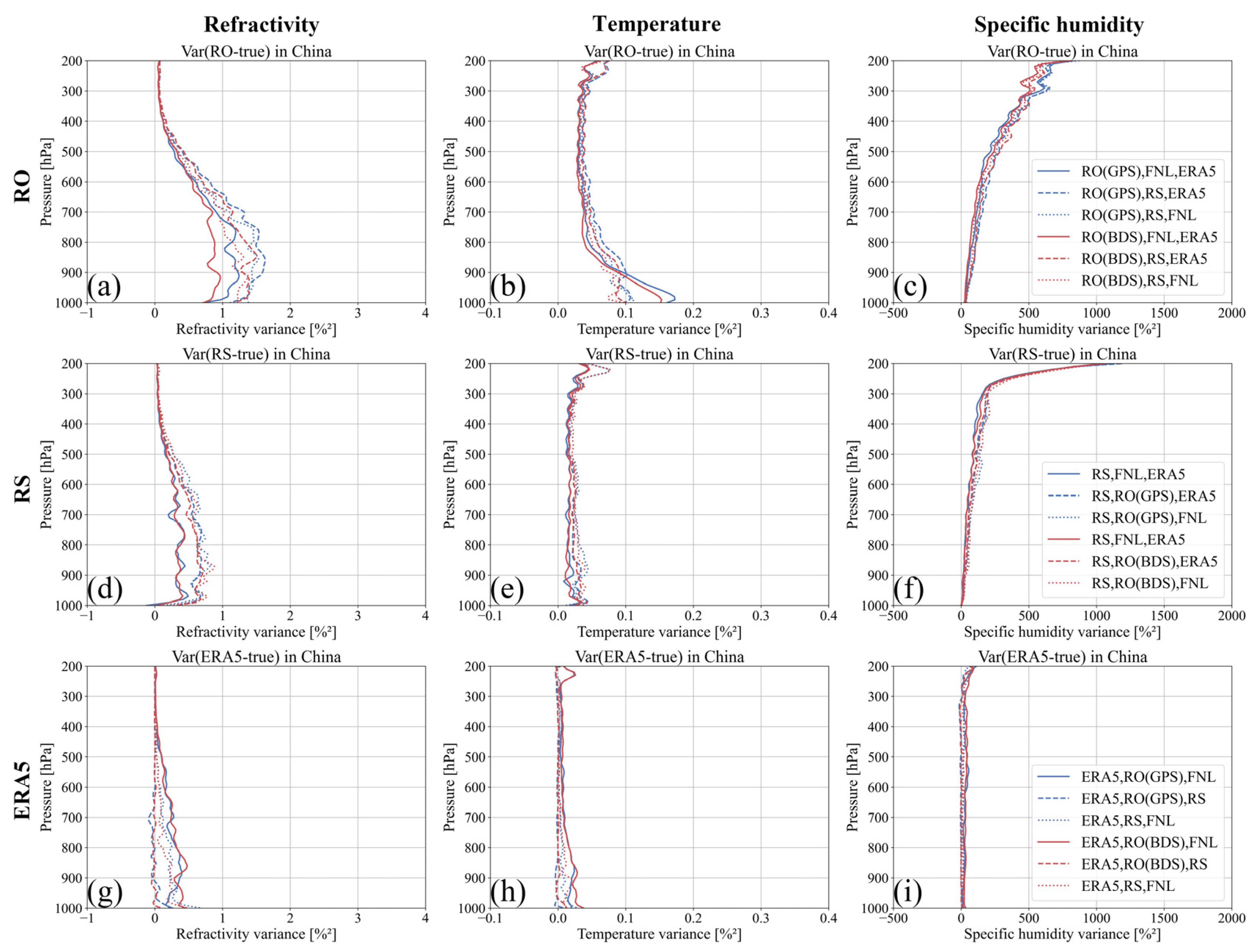
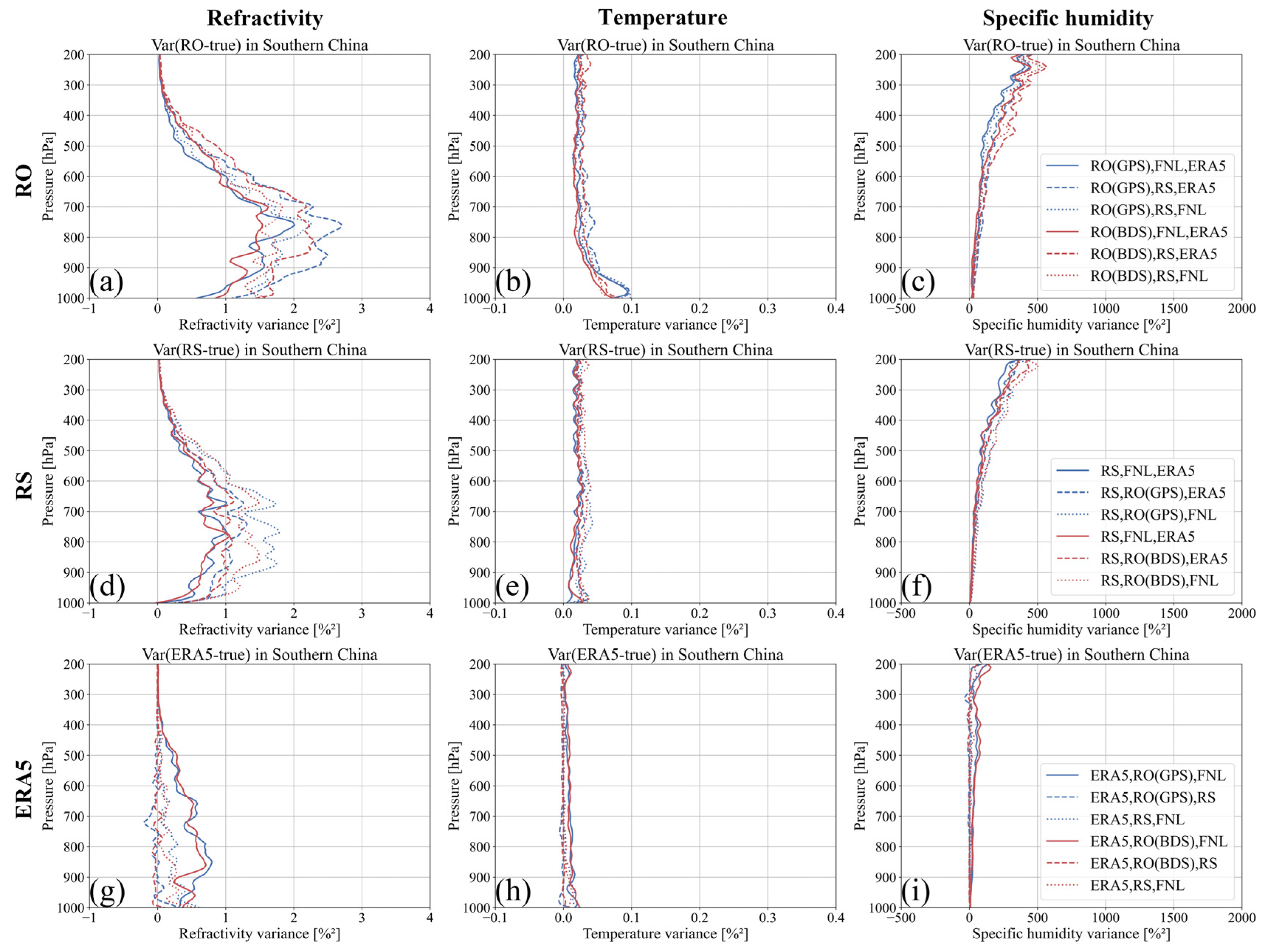
- Using the optimized 3CH method, we calculated the error variances of refractivity, temperature, and specific humidity for the RO, RS, and ERA5 datasets at the 45 selected RS stations. Then, the data were divided into northern and southern China groups based on the locations of the RS stations. Finally, we conducted a comparative analysis of the 3CH error characteristics across different regions, GNSS systems, and datasets.
4. Results and Analysis
4.1. Comparison of Spatial–Temporal Sampling Correction Effects
4.1.1. Refractivity Error Variances
4.1.2. Temperature Error Variances
4.1.3. Specific Humidity Error Variances
4.2. Error Variances Based on Ensemble Datasets
4.2.1. Results for the Entire Region of China
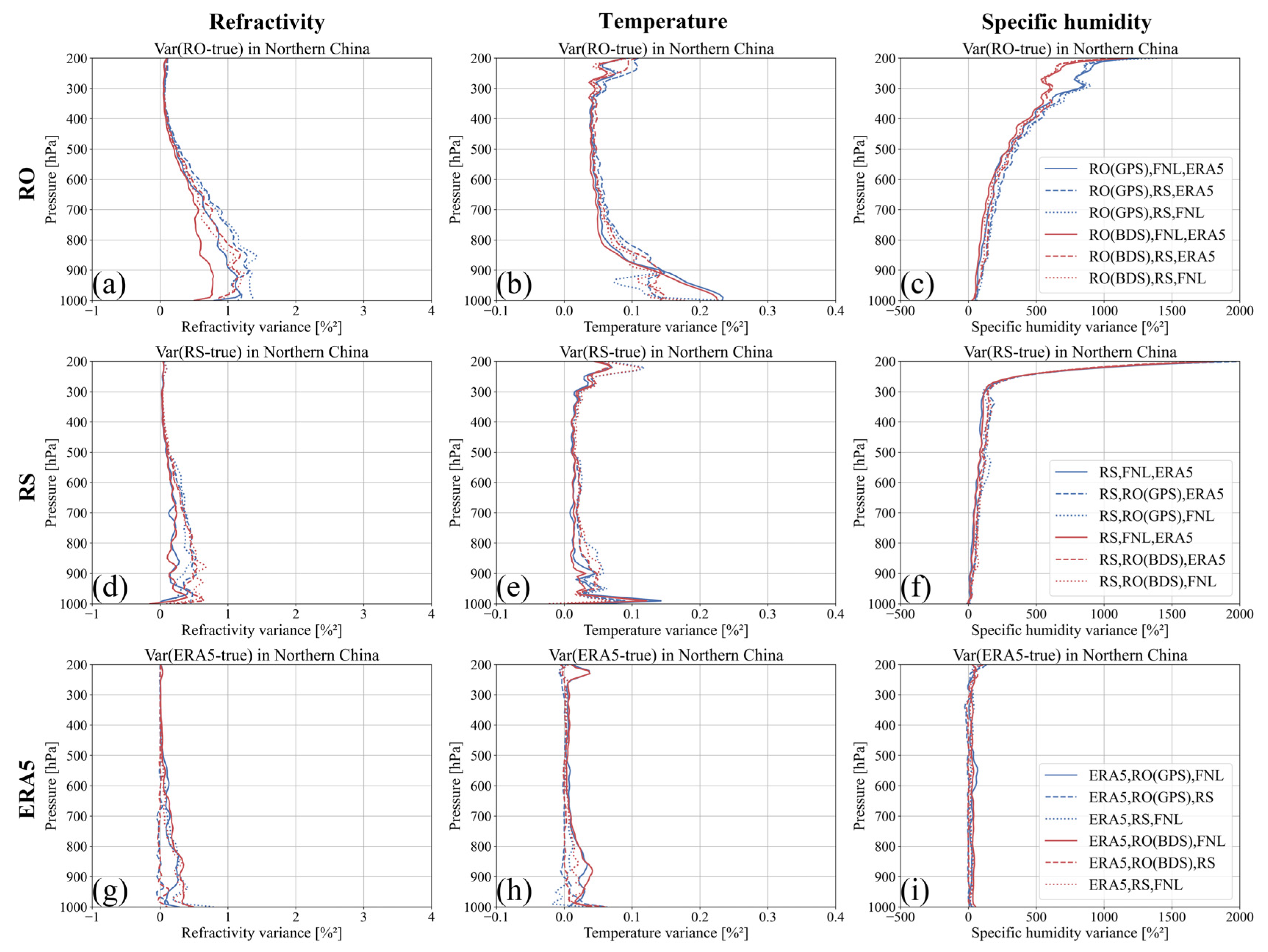
4.2.2. Comparison Results between the Northern and Southern Regions of China
5. Summary and Conclusions
- (1)
- Comparing the NO SC, RO–RS SC, and RO–RS–ERA5 SC experimental groups, the 3CH processing chain with RO–RS–ERA5 SC effectively reduces the error variance of the RS dataset and minimizes the differences between the combinations of RO, RS, and ERA5 datasets. It effectively eliminates the impact of spatial–temporal sampling errors on RO–RS and RS–model pairs, and more accurately reflects the error variance of the atmospheric measurements.
- (2)
- In the entire China region, the average of error variances for atmospheric refractivity, temperature, and specific humidity from the FY-3E GNOS II RO are less than 1.12%2, 0.13%2, and 700%2, respectively. The FY-3E GNOS II BDS RO and FY-3E GNOS II GPS RO have good error consistency.
- (3)
- Comparing the atmospheric parameter error variance between northern and southern China reveals that refractivity error variance is lower in the north, while temperature and specific humidity error variances are lower in the south. These differences are related to the different climatic conditions.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kliore, A.; Fjeldbo, G.; Seidel, B.L.; Rasool, S.I. Mariners 6 and 7: Radio Occultation Measurements of the Atmosphere of Mars. Science 1969, 166, 1393–1397. [Google Scholar] [CrossRef] [PubMed]
- Lindal, G.F.; Lyons, J.R.; Sweetnam, D.N.; Eshleman, V.R.; Hinson, D.P.; Tyler, G.L. The atmosphere of Uranus: Results of radio occultation measurements with Voyager 2. J. Geophys. Res. Space Phys. 1987, 92, 14987–15001. [Google Scholar] [CrossRef]
- Ho, S.-P.; Zhou, X.J.; Shao, X.; Zhang, B.; Adhikari, L.; Kireev, S.; He, Y.X.; Yoe, J.G.; Xia-Serafino, W.; Lynch, E. Initial Assessment of the COSMIC-2/FORMOSAT-7 Neutral Atmosphere Data Quality in NESDIS/STAR Using In Situ and Satellite Data. Remote Sens. 2020, 12, 4099. [Google Scholar] [CrossRef]
- Kursinski, E.R.; Hajj, G.A.; Schofield, J.T.; Linfield, R.P.; Hardy, K.R. Observing Earth’s atmosphere with radio occultation measurements using the Global Positioning System. J. Geophys. Res. Atmos. 1997, 102, 23429–23465. [Google Scholar] [CrossRef]
- Steiner, A.K.; Lackner, B.C.; Ladstädter, F.; Scherllin-Pirscher, B.; Foelsche, U.; Kirchengast, G. GPS radio occultation for climate monitoring and change detection. Radio Sci. 2011, 46, 1–17. [Google Scholar] [CrossRef]
- Bai, W.H.; Deng, N.; Sun, Y.Q.; Du, Q.F.; Xia, J.M.; Wang, X.Y.; Meng, X.G.; Zhao, D.Y.; Liu, C.L.; Tan, G.Y.; et al. Applications of GNSS-RO to Numerical Weather Prediction and Tropical Cyclone Forecast. Atmosphere 2020, 11, 1204. [Google Scholar] [CrossRef]
- Bowler, N.E. Revised GNSS-RO observation uncertainties in the Met Office NWP system. Q. J. R. Meteorol. Soc. 2020, 146, 2274–2296. [Google Scholar] [CrossRef]
- Cucurull, L. Sensitivity of NWP model skill to the obliquity of the GPS radio occultation soundings. Atmos. Sci. Lett. 2012, 13, 55–60. [Google Scholar] [CrossRef]
- Gao, P.; Xu, X.H.; Zhang, X.H. On the relationship between the QBO/ENSO and atmospheric temperature using COSMIC radio occultation data. J. Atmos. Sol.-Terr. Phys. 2017, 156, 103–110. [Google Scholar] [CrossRef]
- Scherllin-Pirscher, B.; Deser, C.; Ho, S.-P.; Chou, C.; Randel, W.; Kuo, Y.-H. The vertical and spatial structure of ENSO in the upper troposphere and lower stratosphere from GPS radio occultation measurements. Geophys. Res. Lett. 2012, 39, L20801. [Google Scholar] [CrossRef]
- Khaykin, S.M.; Funatsu, B.M.; Hauchecorne, A.; Godin-Beekmann, S.; Claud, C.; Keckhut, P.; Pazmino, A.; Gleisner, H.; Nielsen, J.K.; Syndergaard, S.; et al. Postmillennium changes in stratospheric temperature consistently resolved by GPS radio occultation and AMSU observations. Geophys. Res. Lett. 2017, 44, 7510–7518. [Google Scholar] [CrossRef]
- Babu, S.R. Convective tropopause over the tropics: Climatology, seasonality, and inter-annual variability inferred from long-term FORMOSAT-3/COSMIC-1 RO data. Atmos. Res. 2024, 298, 107159. [Google Scholar] [CrossRef]
- Sui, X.H.; Wu, F.L.; Zhao, Y. Extreme Weather Monitoring Using GPS Radio Occultation Technique Preliminary Result from 2010 Yunnan Drought Analysis. In Proceedings of the International Conference on Environment Science (ICES 2012), Melbourne, Australia, 15–16 January 2012. [Google Scholar]
- Wang, Y.; Jin, S.G. Effect of GNSS radio occultation observations on the prediction of the 2021 Henan rainstorm. GPS Solut. 2023, 27, 102. [Google Scholar] [CrossRef]
- Sun, Y.Q.; Bai, W.H.; Liu, C.L.; Liu, Y.; Du, Q.F.; Wang, X.Y.; Yang, G.L.; Liao, M.; Yang, Z.D.; Zhang, X.X.; et al. The FengYun-3C radio occultation sounder GNOS: A review of the mission and its early results and science applications. Atmos. Meas. Tech. 2018, 11, 5797–5811. [Google Scholar] [CrossRef]
- Jakowski, N.; Heise, S.; Wehrenpfennig, A.; Schlüter, S.; Reimer, R. GPS/GLONASS-based TEC measurements as a contributor for space weather forecast. J. Atmos. Sol.-Terr. Phys. 2002, 64, 729–735. [Google Scholar] [CrossRef]
- Rocken, C.; Anthes, R.; Exner, M.; Hunt, D.; Sokolovskiy, S.; Ware, R.; Gorbunov, M.; Schreiner, W.; Feng, D.; Herman, B.; et al. Analysis and validation of GPS/MET data in the neutral atmosphere. J. Geophys. Res. Atmos. 1997, 102, 29849–29866. [Google Scholar] [CrossRef]
- Anthes, R.A.; Bernhardt, P.A.; Chen, Y.; Cucurull, L.; Dymond, K.F.; Ector, D.; Healy, S.B.; Ho, S.-P.; Hunt, D.C.; Kuo, Y.-H.; et al. The COSMIC/FORMOSAT-3 Mission: Early Results. Bull. Am. Meteorol. Soc. 2008, 89, 313–334. [Google Scholar] [CrossRef]
- Chen, S.-Y.; Liu, C.-Y.; Huang, C.-Y.; Hsu, S.-C.; Li, H.-W.; Lin, P.-H.; Cheng, J.-P.; Huang, C.-Y. An Analysis Study of FORMOSAT-7/COSMIC-2 Radio Occultation Data in the Troposphere. Remote Sens. 2021, 13, 717. [Google Scholar] [CrossRef]
- Han, S.-C.; Shum, C.K.; Jekeli, C.; Alsdorf, D. Improved estimation of terrestrial water storage changes from GRACE. Geophys. Res. Lett. 2005, 32, L07302. [Google Scholar] [CrossRef]
- Healy, S.B.; Wickert, J.; Michalak, G.; Schmidt, T.; Beyerle, G. Combined forecast impact of GRACE-A and CHAMP GPS radio occultation bending angle profiles. Atmos. Sci. Lett. 2007, 8, 43–50. [Google Scholar] [CrossRef]
- Steiner, A.K.; Kirchengast, G.; Borsche, M.; Foelsche, U.; Schoengassner, T. A multi-year comparison of lower stratospheric temperatures from CHAMP radio occultation data with MSU/AMSU records. J. Geophys. Res. Atmos. 2007, 112, D22110. [Google Scholar] [CrossRef]
- Wickert, J.; Reigber, C.; Beyerle, G.; König, R.; Marquardt, C.; Schmidt, T.; Grunwaldt, L.; Galas, R.; Meehan, T.K.; Melbourne, W.G.; et al. Atmosphere sounding by GPS radio occultation: First results from CHAMP. Geophys. Res. Lett. 2001, 28, 3263–3266. [Google Scholar] [CrossRef]
- Gorbunov, M.E.; Lauritsen, K.B.; Benzon, H.H.; Larsen, G.B.; Syndergaard, S.; Sørensen, M.B. Processing of GRAS/METOP radio occultation data recorded in closed-loop and raw-sampling modes. Atmos. Meas. Tech. 2011, 4, 1021–1026. [Google Scholar] [CrossRef]
- Rapp, M.; Dörnbrack, A.; Kaifler, B. An intercomparison of stratospheric gravity wave potential energy densities from METOP GPS radio occultation measurements and ECMWF model data. Atmos. Meas. Tech. 2018, 11, 1031–1048. [Google Scholar] [CrossRef]
- Liao, M.; Zhang, P.; Yang, G.L.; Bi, Y.M.; Liu, Y.; Bai, W.H.; Meng, X.G.; Du, Q.F.; Sun, Y.Q. Preliminary validation of the refractivity from the new radio occultation sounder GNOS/FY-3C. Atmos. Meas. Tech. 2016, 9, 781–792. [Google Scholar] [CrossRef]
- Hou, X.Y.; Han, Y.; Hu, X.Q.; Weng, F.Z. Verification of Fengyun-3D MWTS and MWHS Calibration Accuracy Using GPS Radio Occultation Data. J. Meteorol. Res. 2019, 33, 695–704. [Google Scholar] [CrossRef]
- Du, Q.F.; Sun, Y.Q.; Bai, W.H.; Wang, X.Y.; Wang, D.W.; Meng, X.G.; Cai, Y.R.; Xia, J.M.; Wu, C.J.; Liu, C.L.; et al. The advancements in research of FY-3 GNOS II and instrument performance. In Proceedings of the 2018 IGARSS International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 3347–3350. [Google Scholar]
- Yang, G.L.; Bai, W.H.; Wang, J.S.; Hu, X.Q.; Zhang, P.; Sun, Y.Q.; Xu, N.; Zhai, X.C.; Xiao, X.J.; Xia, J.M.; et al. FY3E GNOS II GNSS Reflectometry: Mission Review and First Results. Remote Sens. 2022, 14, 988. [Google Scholar] [CrossRef]
- Sun, Y.Q.; Huang, F.X.; Xia, J.M.; Yin, C.; Bai, W.H.; Du, Q.F.; Wang, X.Y.; Cai, Y.R.; Li, W.; Yang, G.L.; et al. GNOS-II on Fengyun-3 Satellite Series: Exploration of Multi-GNSS Reflection Signals for Operational Applications. Remote Sens. 2023, 15, 5756. [Google Scholar] [CrossRef]
- Li, S.; Xu, T.H.; Jiang, N.; Xu, Y.; Yang, H.L.; Bastos, L. Assessment of the atmosphere profiles and derived parameters from fresh FengYun-3E and other common occultation systems. Measurement 2024, 228, 114367. [Google Scholar] [CrossRef]
- He, Y.L.; Zhang, S.C.; Guo, S.; Wu, Y.L. Quality Assessment of the Atmospheric Radio Occultation Profiles from FY-3E/GNOS-II BDS and GPS Measurements. Remote Sens. 2023, 15, 5313. [Google Scholar] [CrossRef]
- Liu, C.L.; Liao, M.; Sun, Y.Q.; Wang, X.; Liang, J.H.; Hu, X.Q.; Zhang, P.; Yang, G.L.; Liu, Y.; Wang, J.S.; et al. Preliminary Assessment of BDS Radio Occultation Retrieval Quality and Coverage Using FY-3E GNOS II Measurements. Remote Sens. 2023, 15, 5011. [Google Scholar] [CrossRef]
- Kuo, Y.H.; Wee, T.K.; Sokolovskiy, S.; Rocken, C.; Schreiner, W.; Hunt, D.; Anthes, R.A. Inversion and Error Estimation of GPS Radio Occultation Data. J. Meteorol. Soc. Japan Ser. II 2004, 82, 507–531. [Google Scholar] [CrossRef]
- Grubbs, F.E. On Estimating Precision of Measuring Instruments and Product Variability. J. Am. Stat. Assoc. 1948, 43, 243–264. [Google Scholar] [CrossRef]
- Rieckh, T.; Anthes, R. Evaluating two methods of estimating error variances using simulated data sets with known errors. Atmos. Meas. Tech. 2018, 11, 4309–4325. [Google Scholar] [CrossRef]
- Gray, J.E.; Allan, D.W. A Method for Estimating the Frequency Stability of an Individual Oscillator. In Proceedings of the 28th Annual Symposium on Frequency Control, Atlantic City, NJ, USA, 29–31 May 1974. [Google Scholar]
- Ekstrom, C.R.; Koppang, P.A. Error bars for three-cornered hats. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2006, 53, 876–879. [Google Scholar] [CrossRef]
- Luna, D.; Pérez, D.; Cifuentes, A.; Gómez, D. Three-Cornered Hat Method via GPS Common-View Comparisons. IEEE Trans. Instrum. Meas. 2017, 66, 2143–2147. [Google Scholar] [CrossRef]
- Valty, P.; De Viron, O.; Panet, I.; Van Camp, M.; Legrand, J. Assessing the precision in loading estimates by geodetic techniques in Southern Europe. Geophys. J. Int. 2013, 194, 1441–1454. [Google Scholar] [CrossRef]
- O’Carroll, A.G.; Eyre, J.R.; Saunders, R.W. Three-Way Error Analysis between AATSR, AMSR-E, and In Situ Sea Surface Temperature Observations. J. Atmos. Ocean. Technol. 2008, 25, 1197–1207. [Google Scholar] [CrossRef]
- Anthes, R.; Rieckh, T. Estimating observation and model error variances using multiple data sets. Atmos. Meas. Tech. 2018, 11, 4239–4260. [Google Scholar] [CrossRef]
- Anthes, R.; Sjoberg, J.; Rieckh, T.; Wee, T.-K.; Zeng, J. COSMIC-2 radio occultation temperature, specific humidity, and precipitable water in Hurricane Dorian (2019). Terr. Atmos. Ocean. Sci. 2021, 32, 925–938. [Google Scholar] [CrossRef]
- Rieckh, T.; Sjoberg, J.P.; Anthes, R.A. The Three-Cornered Hat Method for Estimating Error Variances of Three or More Atmospheric Datasets. Part II: Evaluating Radio Occultation and Radiosonde Observations, Global Model Forecasts, and Reanalyses. J. Atmos. Ocean. Technol. 2021, 38, 1777–1796. [Google Scholar] [CrossRef]
- Zhang, J.; Xu, X.; Luo, J. Estimating the observation errors of FY-3C radio occultation dataset using the three-cornered hat method. Terr. Atmos. Ocean. Sci. 2023, 34, 22. [Google Scholar] [CrossRef]
- Schreiner, W.S.; Weiss, J.P.; Anthes, R.A.; Braun, J.; Chu, V.; Fong, J.; Hunt, D.; Kuo, Y.-H.; Meehan, T.; Serafino, W.; et al. COSMIC-2 Radio Occultation Constellation: First Results. Geophys. Res. Lett. 2020, 47, e2019GL086841. [Google Scholar] [CrossRef]
- Sjoberg, J.P.; Anthes, R.A.; Rieckh, T. The Three-Cornered Hat Method for Estimating Error Variances of Three or More Atmospheric Datasets. Part I: Overview and Evaluation. J. Atmos. Ocean. Technol. 2021, 38, 555–572. [Google Scholar] [CrossRef]
- Xu, X.; Zou, X.L. Global 3D Features of Error Variances of GPS Radio Occultation and Radiosonde Observations. Remote Sens. 2021, 13, 1. [Google Scholar] [CrossRef]
- Gilpin, S.; Rieckh, T.; Anthes, R. Reducing representativeness and sampling errors in radio occultation–radiosonde comparisons. Atmos. Meas. Tech. 2018, 11, 2567–2582. [Google Scholar] [CrossRef]
- Sun, B.M.; Reale, A.; Seidel, D.J.; Hunt, D.C. Comparing radiosonde and COSMIC atmospheric profile data to quantify differences among radiosonde types and the effects of imperfect collocation on comparison statistics. J. Geophys. Res. Atmos. 2010, 115, D23104. [Google Scholar] [CrossRef]
- Zhang, K.; Fu, E.; Silcock, D.; Wang, Y.; Kuleshov, Y. An investigation of atmospheric temperature profiles in the Australian region using collocated GPS radio occultation and radiosonde data. Atmos. Meas. Tech. 2011, 4, 2087–2092. [Google Scholar] [CrossRef]
- Haimberger, L.; Tavolato, C.; Sperka, S. Homogenization of the Global Radiosonde Temperature Dataset through Combined Comparison with Reanalysis Background Series and Neighboring Stations. J. Clim. 2012, 25, 8108–8131. [Google Scholar] [CrossRef]
- Tradowsky, J.S.; Burrows, C.P.; Healy, S.B.; Eyre, J.R. A New Method to Correct Radiosonde Temperature Biases Using Radio Occultation Data. J. Appl. Meteorol. Climatol. 2017, 56, 1643–1661. [Google Scholar] [CrossRef]
- Smith, E.K.; Weintraub, S. The Constants in the Equation for Atmospheric Refractive Index at Radio Frequencies. Proc. IRE 1953, 41, 1035–1037. [Google Scholar] [CrossRef]
- Durre, I.; Yin, X.G.; Vose, R.S.; Applequist, S.; Arnfield, J. Enhancing the Data Coverage in the Integrated Global Radiosonde Archive. J. Atmos. Ocean. Technol. 2018, 35, 1753–1770. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, J.; Liu, C.; Wang, X.; Meng, X.; Sun, Y.; Liao, M.; Hu, X.; Lu, W.; Wang, J.; Zhang, P.; et al. Assessment of FY-3E GNOS II Radio Occultation Data Using an Improved Three-Cornered Hat Method. Remote Sens. 2024, 16, 3808. https://doi.org/10.3390/rs16203808
Liang J, Liu C, Wang X, Meng X, Sun Y, Liao M, Hu X, Lu W, Wang J, Zhang P, et al. Assessment of FY-3E GNOS II Radio Occultation Data Using an Improved Three-Cornered Hat Method. Remote Sensing. 2024; 16(20):3808. https://doi.org/10.3390/rs16203808
Chicago/Turabian StyleLiang, Jiahui, Congliang Liu, Xi Wang, Xiangguang Meng, Yueqiang Sun, Mi Liao, Xiuqing Hu, Wenqiang Lu, Jinsong Wang, Peng Zhang, and et al. 2024. "Assessment of FY-3E GNOS II Radio Occultation Data Using an Improved Three-Cornered Hat Method" Remote Sensing 16, no. 20: 3808. https://doi.org/10.3390/rs16203808
APA StyleLiang, J., Liu, C., Wang, X., Meng, X., Sun, Y., Liao, M., Hu, X., Lu, W., Wang, J., Zhang, P., Yang, G., Xu, N., Bai, W., Du, Q., Hu, P., Tan, G., Wang, X., Xia, J., Huang, F., ... Li, P. (2024). Assessment of FY-3E GNOS II Radio Occultation Data Using an Improved Three-Cornered Hat Method. Remote Sensing, 16(20), 3808. https://doi.org/10.3390/rs16203808