


Drone SAR Imaging for Monitoring an Active Landslide Adjacent to the M25 at Flint Hall Farm

 ,
,  , and
, and
Abstract
:1. Introduction
- Hardware development for a drone radar system.
- Software development for SAR imaging from the drone radar system.
- Fieldwork for repeat-pass SAR data collection.
- Software development for InSAR.
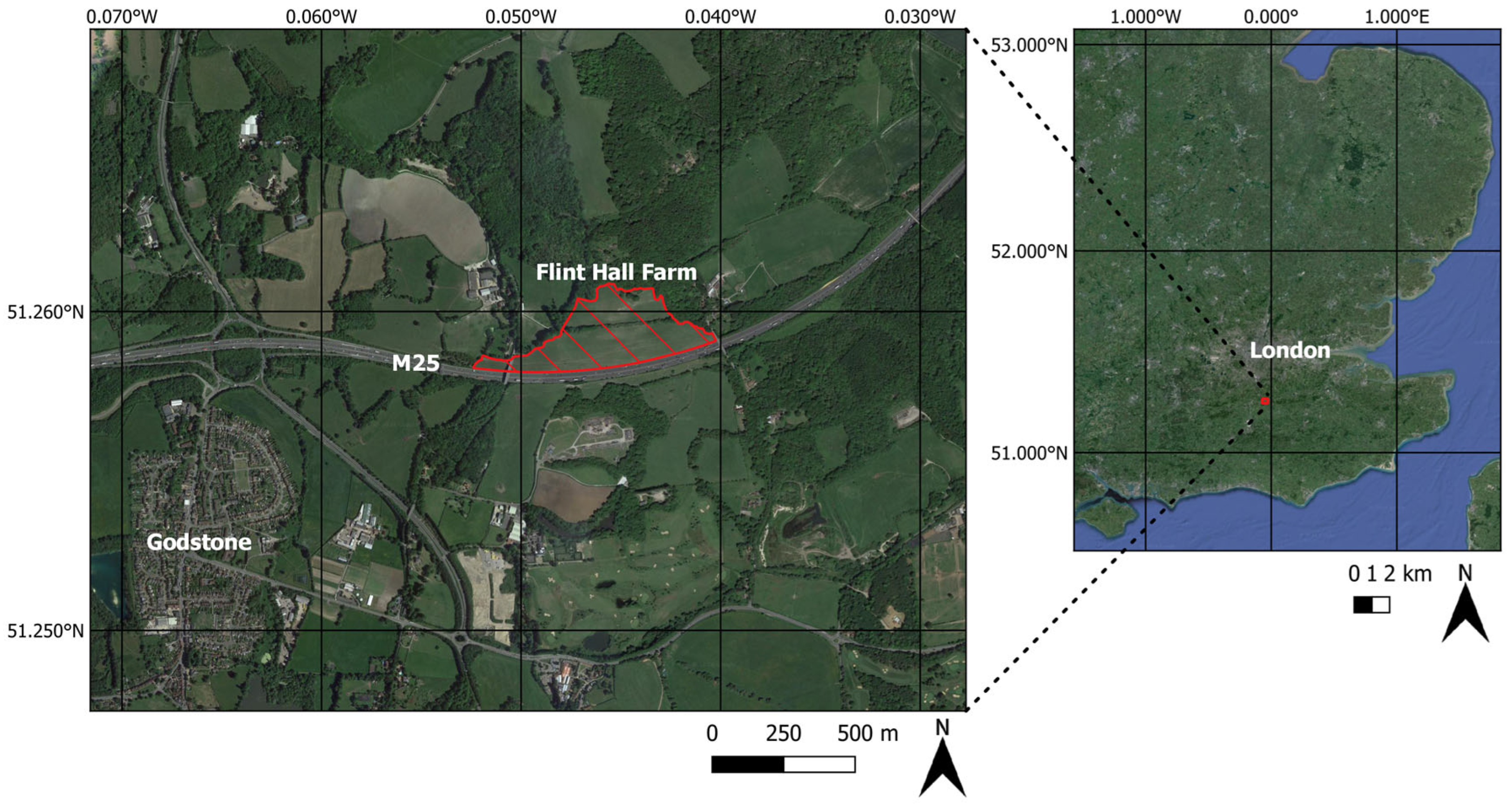
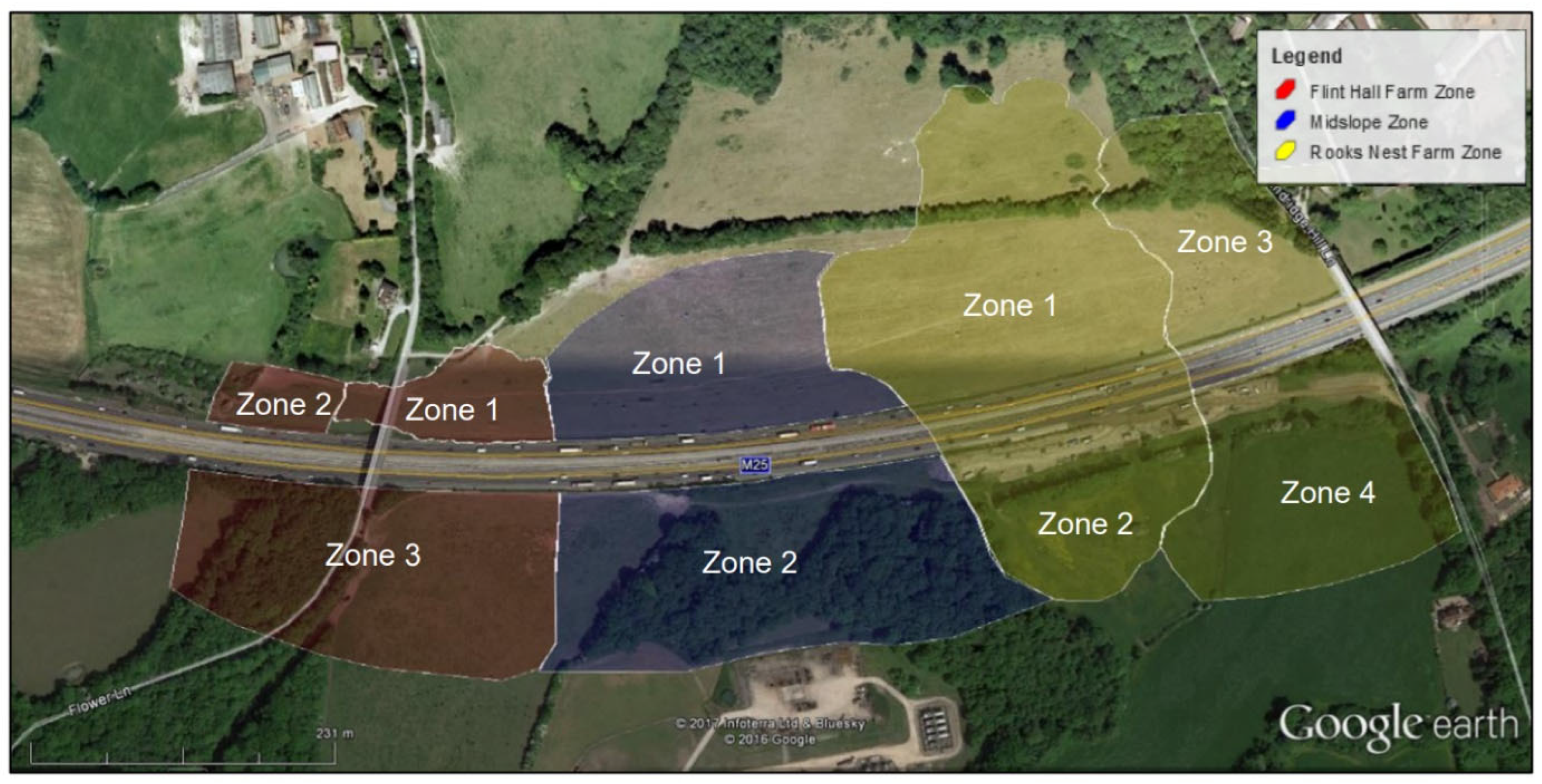
2. Study Area
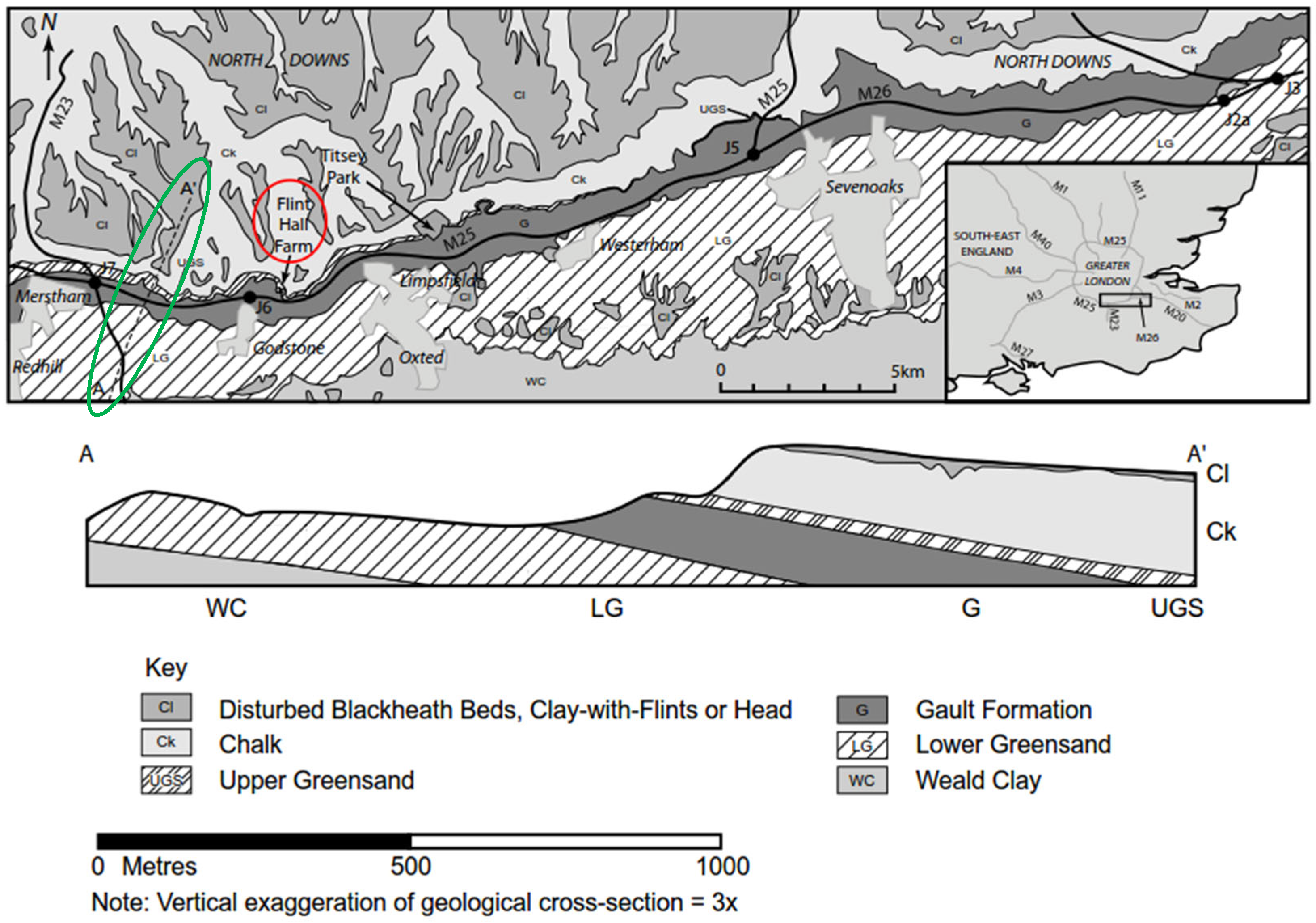
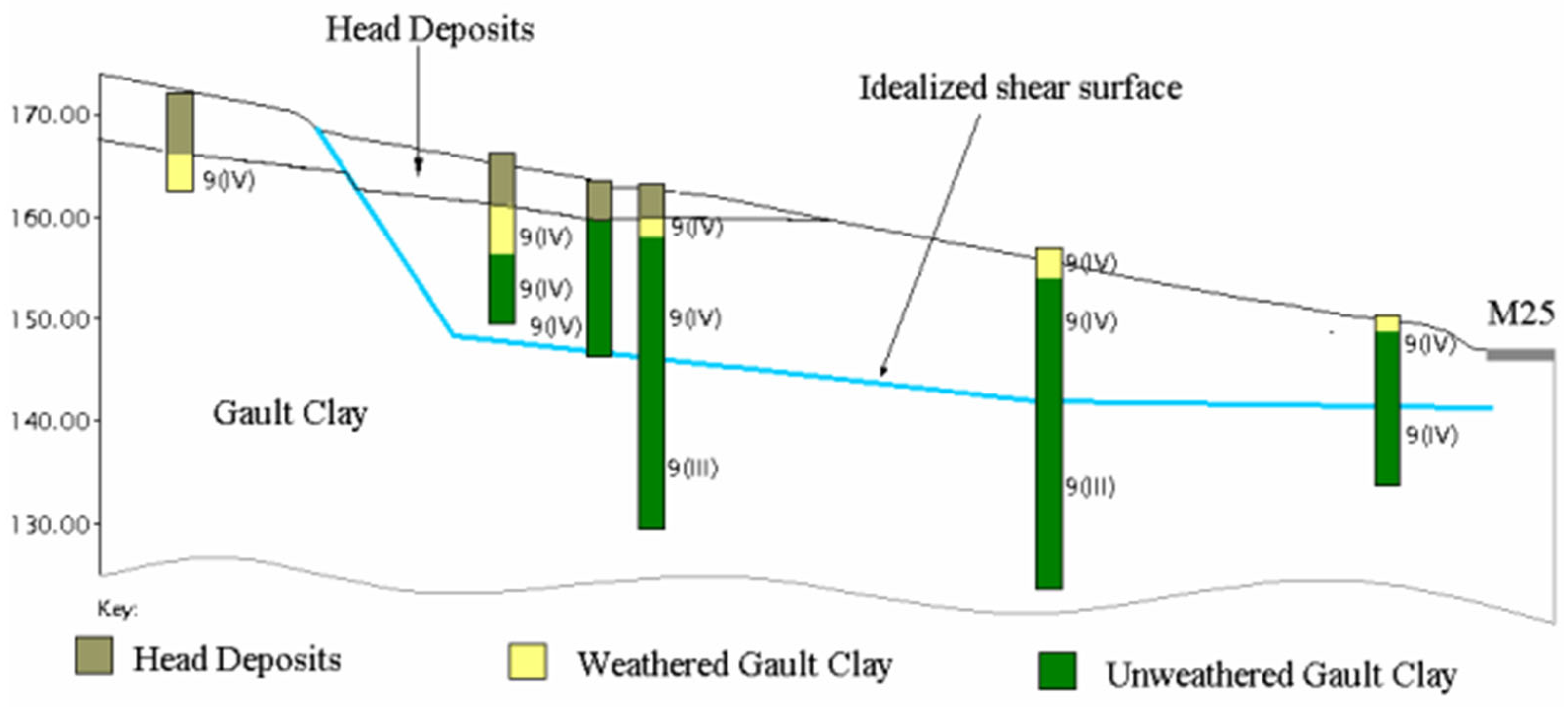
2.1. Geology
2.2. Hydrological Regime
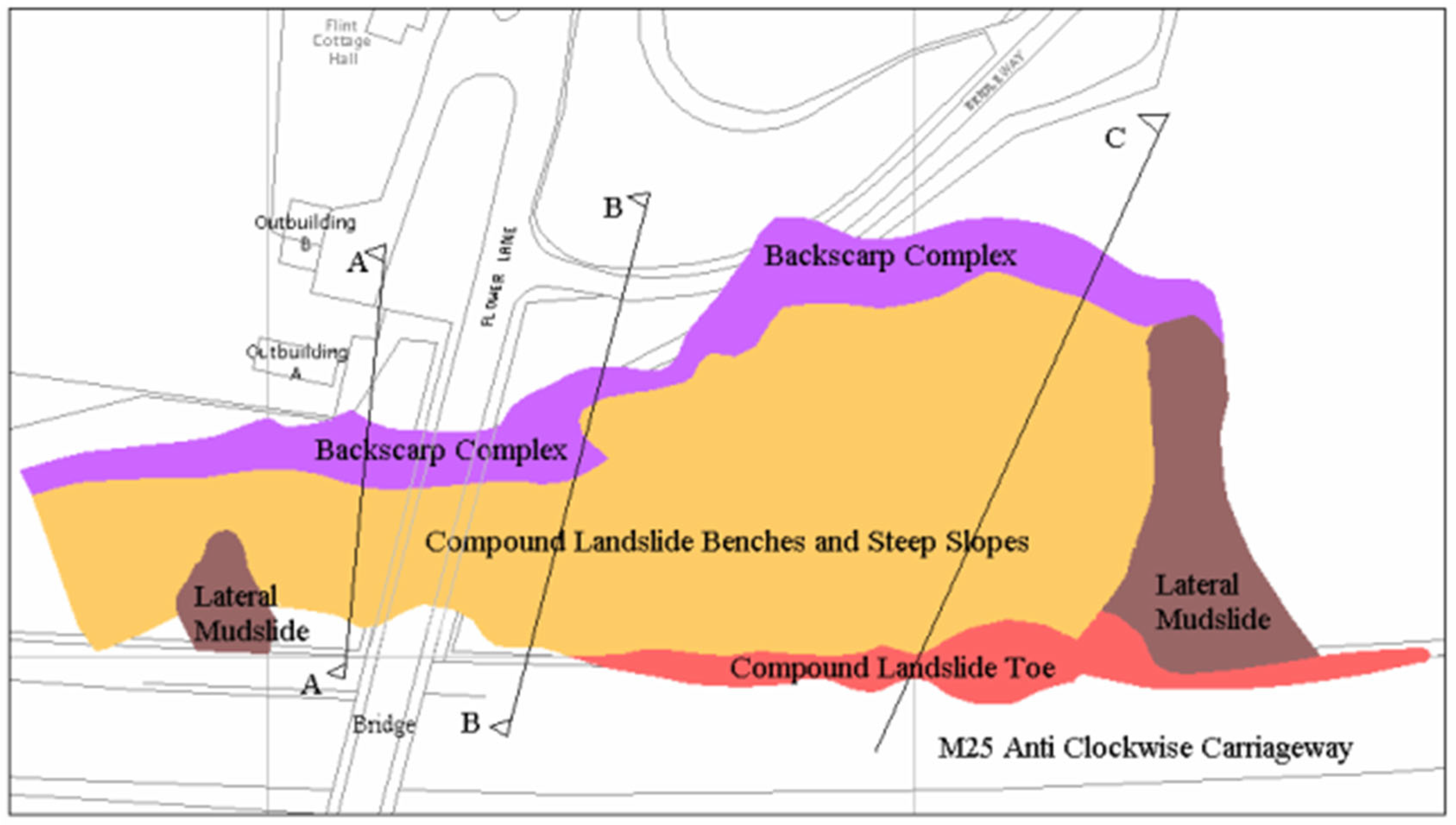
2.3. Landslide Mechanisms
3. Materials and Methods
3.1. Corner Reflectors
3.2. Hardware Development
3.2.1. Drone
3.2.2. Software Defined Radio/Radar (SDR)
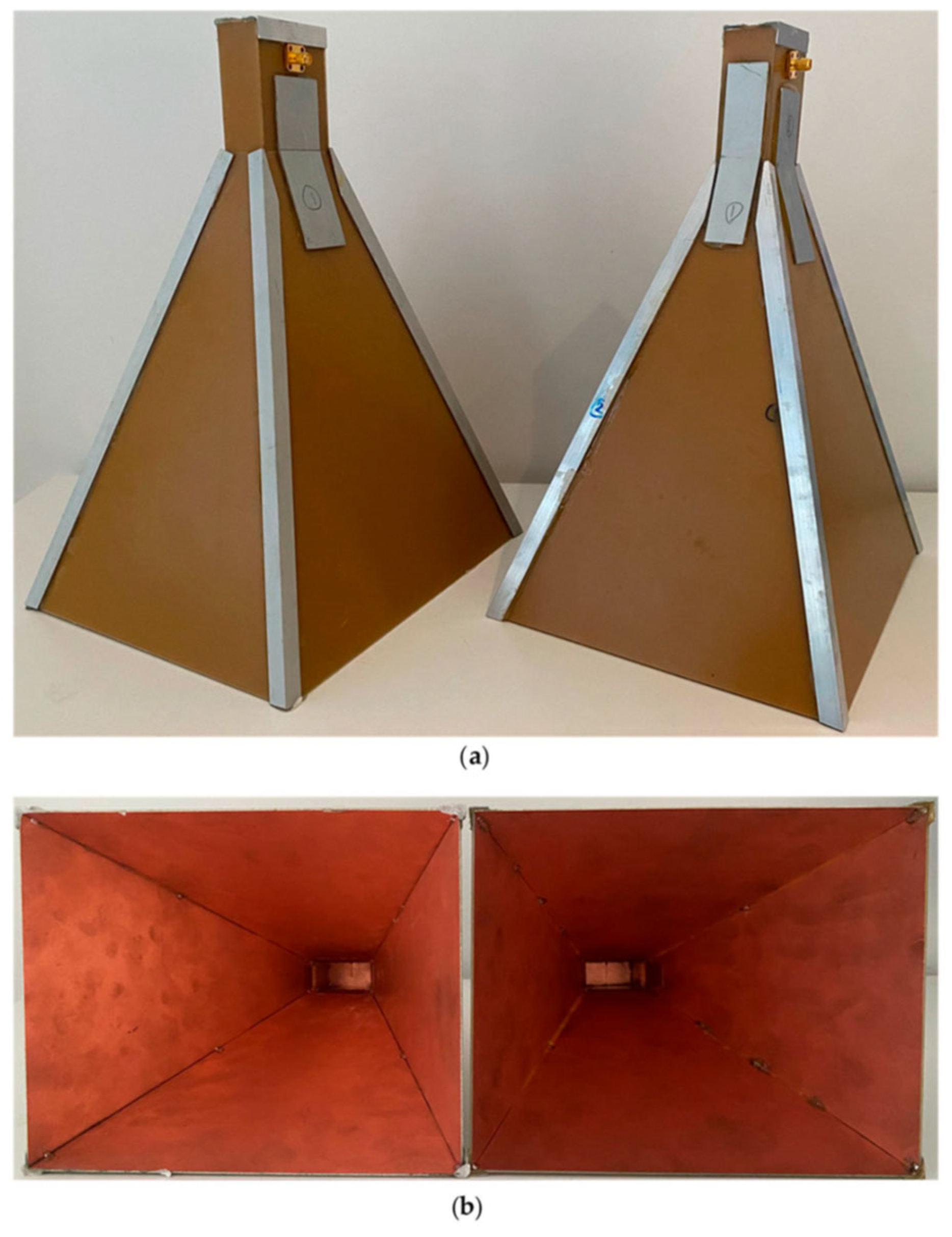
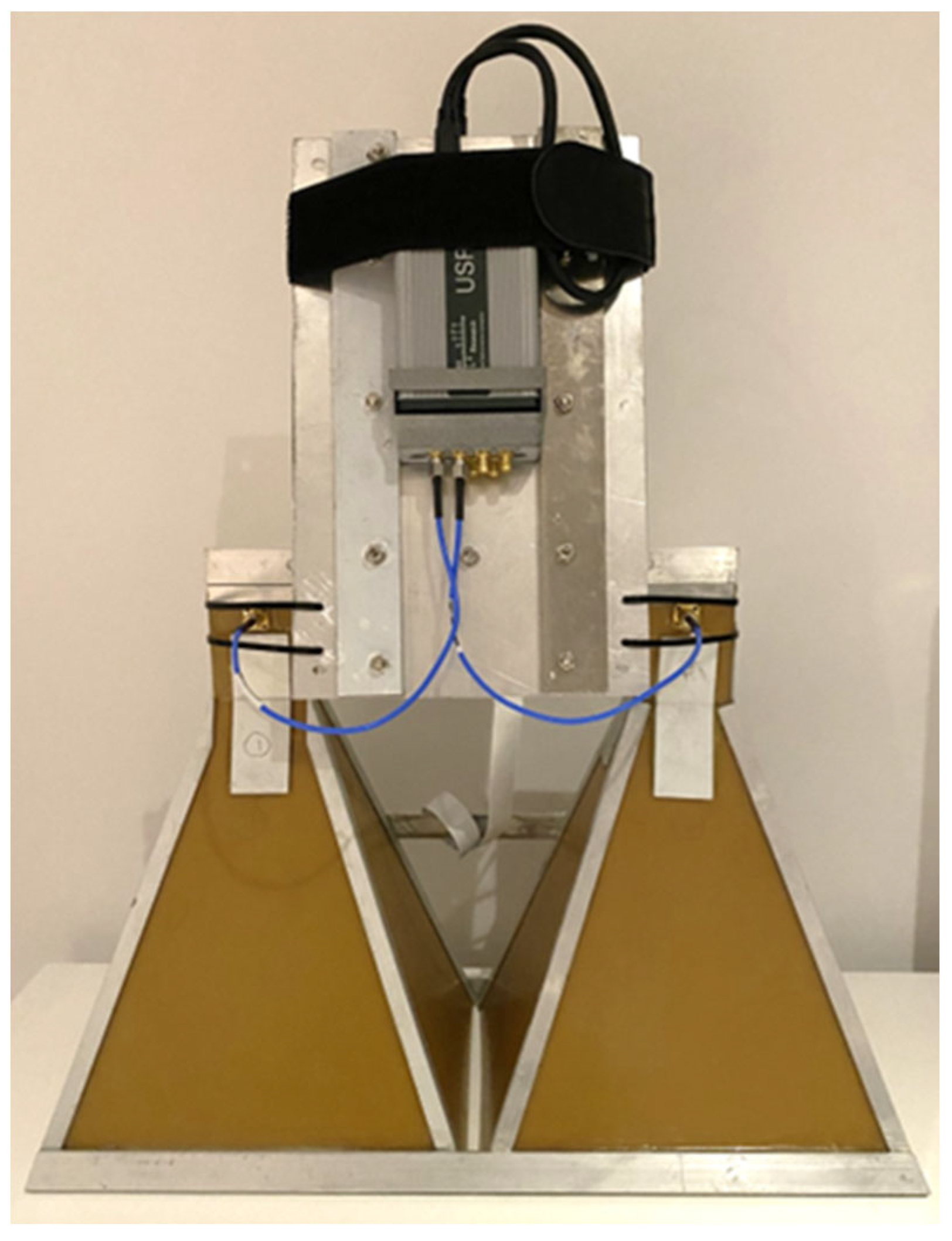
3.2.3. Antennas
3.2.4. Single Board Computer (SBC)
3.2.5. Payload Enclosure and Other Components
3.3. Software
3.3.1. DJI Ground Station (GS) Pro
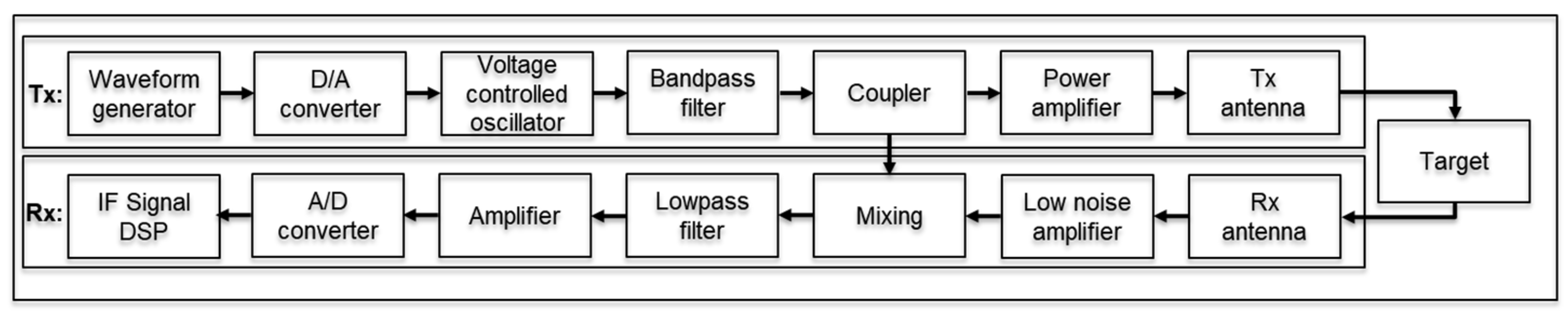
3.3.2. Frequency Modulated Continuous Wave (FMCW) Radar
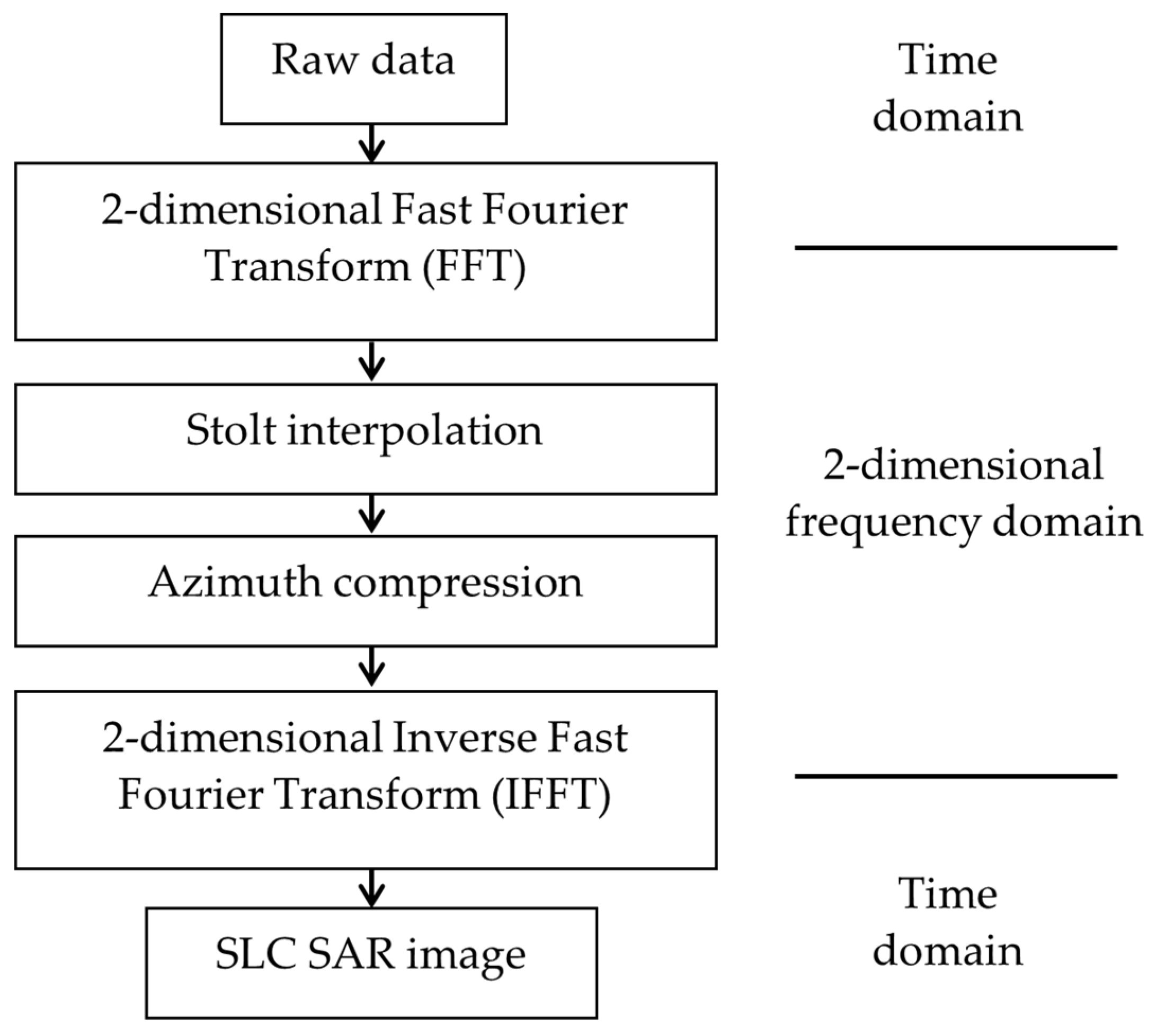
3.3.3. Range Migration Algorithm (RMA)
- Raw radar data: the unfocussed in-phase and quadrature (I/Q) data collected by the E312 in a matrix format; the rows and columns correspond to the downrange and cross-range directions, respectively.
- Waveform definition: including sample rate (Hz), LFM sweep time (μs), bandwidth (Hz), direction and interval, output format and number of samples and sweeps. These parameters are derived from the Signal Source block in GRC.
- Platform velocity: drone flight speed, which is typically 1 m/s, derived from the automated flight path data in DJI GS Pro and verified through the fixed GNSS data in Emlid Studio.
- Operating frequency: radar centre frequency of 5.4 GHz, derived from the UHD: USRP Sink and Source blocks in GRC.
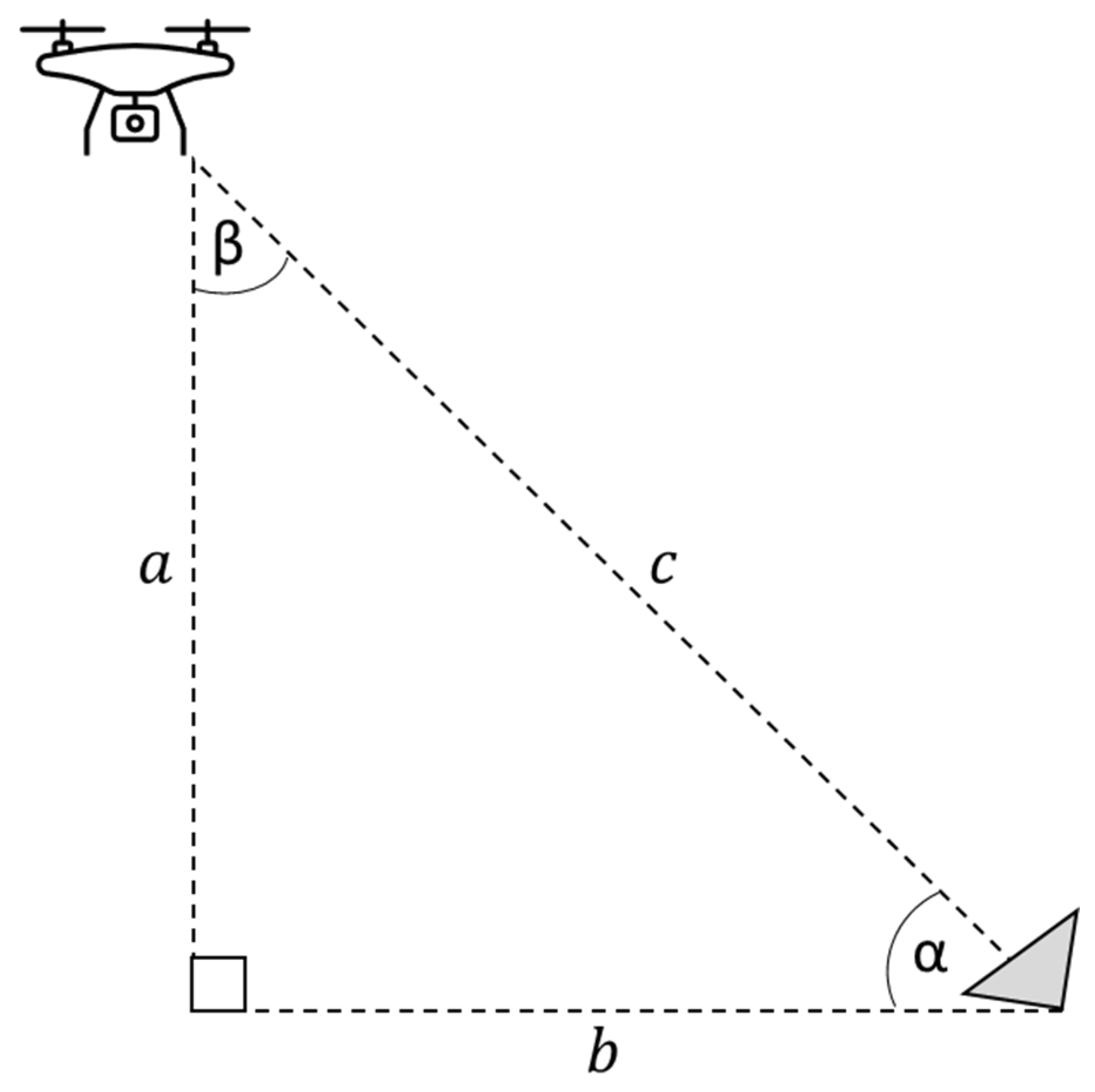
- Range distance: distance between the radar antennas and the beam centre on the ground, derived from Equation (1).
3.4. Fieldwork Procedures
3.4.1. Flight Safety
3.4.2. Data Collection
4. Results
4.1. Preliminary Results
- Flight duration: the drone demonstrated an average maximum flight duration of 21 min with the 3.5 kg payload attached. Any variability in the flight duration is attributed to varied atmospheric conditions, such as wind speeds and atmospheric pressure.
- Flight stability: the drone demonstrated safe and stable flight at low to medium speeds with the payload attached. The hexacopter efficiently distributes the additional weight and maintains stability in windy conditions.
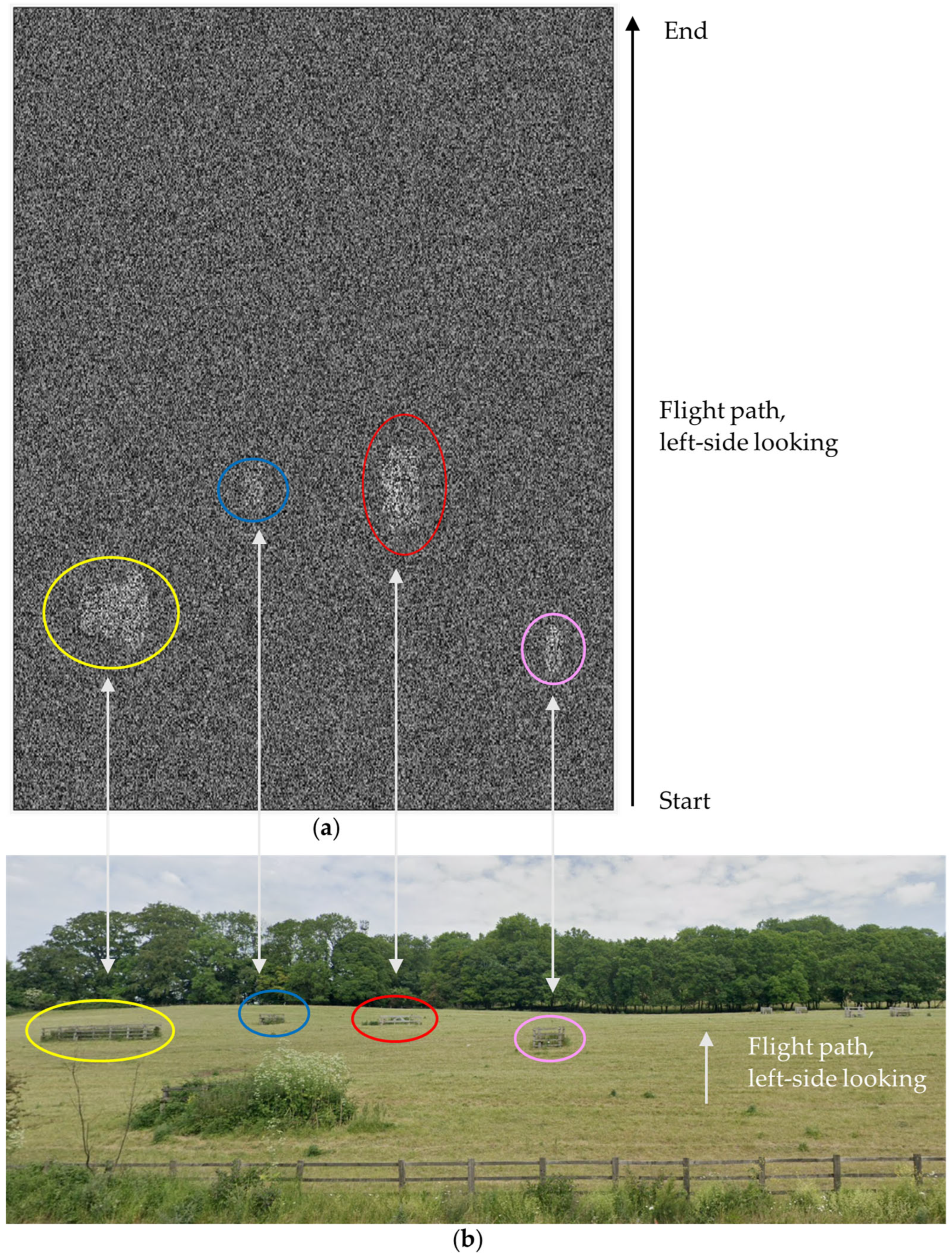
4.2. SAR Image
5. Discussion
6. Conclusions
- The first SAR image from our drone radar system. This is a newly developing field of remote sensing research, with few authors demonstrating similar systems. The image validates our custom and novel hardware production of CCL radar horn antennas.
- A comparison of the drone SAR image and Sentinel-1 SAR shows that the former provides an improved centimetric spatial resolution compared to the meter-level resolution of the latter. This is useful for the identification and imaging of small and closely spaced targets, such as the corner reflectors and in situ instrumentation at Flint Hall Farm.
- A complete overview of the hardware and software development for the drone radar system; other demonstrations of drone radar systems in the literature do not provide such a comprehensive account.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Davies, J.P.; Loveridge, F.A.; Perry, J.; Patterson, D.; Carder, D. Stabilisation of a landslide on the M25 highway London’s main artery. In Proceedings of the 12th Pan-American Conference on Soil Mechanics and Geotechnical Engineering, Boston, MA, USA, 22–26 June 2003. [Google Scholar]
- Uys, D. InSAR: An Introduction. Preview 2016, 182, 43–48. [Google Scholar] [CrossRef]
- Bianchini, S.; Pratesi, F.; Nolesini, T.; Casagli, N. Building deformation assessment by means of persistent scatterer interferometry analysis on a landslide-affected area: The Volterra (Italy) case study. Remote Sens. 2015, 7, 4678–4701. [Google Scholar] [CrossRef]
- O’Connor, W.; Mider, G.; Lawrence, J.A.; Agar, S.; Mason, P.J.; Ghail, R.; Scoular, J. An Investigation into Ground Movement on the Ventnor Landslide Complex, UK Using Persistent Scatterer Interferometry. Remote Sens. 2021, 13, 3711. [Google Scholar] [CrossRef]
- Rosi, A.; Tofani, V.; Tanteri, L.; Stefanelli, C.T.; Agostini, A.; Catani, F.; Casagli, N. The new landslide inventory of Tuscany (Italy) updated with PS-InSAR: Geomorphological features and landslide distribution. Landslides 2018, 15, 5–19. [Google Scholar] [CrossRef]
- Kang, Y.; Zhao, C.; Zhang, Q.; Lu, Z.; Li, B. Application of InSAR Techniques to an Analysis of the Guanling Landslide. Remote Sens. 2017, 9, 1046. [Google Scholar] [CrossRef]
- Carla, T.; Intrieri, E.; Raspini, F.; Bardi, F.; Farina, P.; Ferretti, A.; Colombo, D.; Novali, F.; Casagli, N. Perspectives on the prediction of catastrophic slope failures from satellite InSAR. Sci. Rep. 2019, 9, 18773. [Google Scholar] [CrossRef] [PubMed]
- Liu, P.; Li, Z.; Hoey, T.; Kincal, C.; Zhang, J.; Zeng, Q.; Muller, J.-P. Using advanced InSAR time series techniques to monitor landslide movements in Badong of the Three Gorges region, China. Int. J. Appl. Earth Obs. Geoinf. 2013, 21, 253–264. [Google Scholar] [CrossRef]
- Nefros, C.; Alatza, S.; Loupasakis, C.; Kontoes, C. Persistent Scatterer Interferometry (PSI) Technique for the Identification and Monitoring of Critical Landslide Areas in a Regional and Mountainous Road Network. Remote Sens. 2023, 15, 1550. [Google Scholar] [CrossRef]
- Yi, Y.; Xu, X.; Xu, G.; Gao, H. Landslide Detection Using Time-Series InSAR Method along the Kangding-Batang Section of Shanghai-Nyalam Road. Remote Sens. 2023, 15, 1452. [Google Scholar] [CrossRef]
- Li, C.J.; Ling, H. Synthetic Aperture Radar Imaging Using a Small Consumer Drone. In Proceedings of the 2015 IEEE International Symposium on Antennas and Propagation & USNC/URSI National Radio Science Meeting, Vancouver, BC, Canada, 19–24 July 2015. [Google Scholar]
- Li, C.J.; Ling, H. High-Resolution, Downward-Looking Radar Imaging Using a Small Consumer Drone. In Proceedings of the 2016 IEEE International Symposium on Antennas and Propagation (APSURSI), Fajardo, PR, USA, 26 June–1 July 2016; pp. 2037–2038. [Google Scholar]
- Deguchi, T.; Sugiyama, T.; Kishimoto, M. On the Development of Ground-Based and Drone-Borne Radar System. In Recent Research on Engineering Geology and Geological Engineering, Proceedings of the 2nd GeoMEast International Congress and Exhibition on Sustainable Civil Infrastructures; Springer: Cham, Switzerland, 2018; pp. 115–122. [Google Scholar]
- Deguchi, T.; Sugiyama, T.; Kishimoto, M. Development of SAR system installable on a drone. In Proceedings of the EUSAR 2021: 13th European Conference on Synthetic Aperture Radar, Online, 29–31 April 2021. [Google Scholar]
- Deguchi, T.; Sugiyama, T.; Kishimoto, M. R&D of drone-borne SAR system. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 263–267. [Google Scholar]
- Dill, S.; Schreiber, E.; Engel, M.; Heinzel, A.; Peichl, M. A drone carried multichannel Synthetic Aperture Radar for advanced buried object detection. In Proceedings of the 2019 IEEE Radar Conference (RadarConf), Boston, MA, USA, 22–26 April 2019. [Google Scholar]
- Engel, M.; Heinzel, A.; Schreiber, E.; Dill, S.; Peichl, M. Recent results of a UAV-based Synthetic Aperture Radar for remote sensing applications. In Proceedings of the EUSAR 2021; 13th European Conference on Synthetic Aperture Radar, Online, 29–31 April 2021. [Google Scholar]
- Brotzer, P.; Domínguez, E.M.; Henke, D. Prototype of a Small, Agile, Drone-Based SAR System and Preliminary Focusing Results. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 12–16 July 2021. [Google Scholar]
- Moreira, L.; Castro, F.; Góes, J.A.; Bins, L.; Teruel, B.; Fracarolli, J.; Castro, V.; Alcântara, M.; Oré, G.; Luebeck, D.; et al. A drone-borne multiband DInSAR: Results and applications. In Proceedings of the 2019 IEEE Radar Conference (RadarConf), Boston, MA, USA, 22–26 April 2019. [Google Scholar]
- Moreira, L.; Lübeck, D.; Wimmer, C.; Castro, F.; Góes, J.A.; Castro, V.; Alcântara, M.; Oré, G.; Oliveira, L.P.; Bins, L.; et al. Drone-Borne P-Band Single-Pass InSAR. In Proceedings of the 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 21–25 September 2020. [Google Scholar]
- Oré, G.; Alcântara, M.S.; Góes, J.A.; Oliveira, L.P.; Yepes, J.; Teruel, B.; Castro, V.; Bins, L.S.; Castro, F.; Luebeck, D.; et al. Crop Growth Monitoring with Drone-Borne DInSAR. Remote Sens. 2020, 12, 615. [Google Scholar] [CrossRef]
- Luebeck, D.; Wimmer, C.; Moreira, L.F.; Alcântara, M.; Oré, G.; Góes, J.A.; Oliveira, L.P.; Teruel, B.; Bins, L.S.; Gabrielli, L.H.; et al. Drone-Borne Differential SAR Interferometry. Remote Sens. 2020, 12, 778. [Google Scholar] [CrossRef]
- Sanz, M.; Fedorov, K.G.; Deppe, F.; Solano, E. Challenges in open-air microwave quantum communication and sensing. In Proceedings of the 2018 IEEE Conference on Antenna Measurements & Applications (CAMA), Västerås, Sweden, 3–6 September 2018. [Google Scholar]
- Carpenter, A.; Lawrence, J.A.; Ghail, R.; Mason, P.J. The Development of Copper Clad Laminate Horn Antennas for Drone Interferometric Synthetic Aperture Radar. Drones 2023, 7, 215. [Google Scholar] [CrossRef]
- Atkins. M25 Godstone Landslides Walkover & Monitoring: Phase 1–Site Walkover and Geomorphological Mapping Report; Atkins: London, UK, 2020. [Google Scholar]
- Ellis, L.A.; Harrison, E.; Bowden, A.J. Landslides on Gault: Geomorphological identification and qualitative risk assessment. Q. J. Eng. Geol. Hydrogeol. 2011, 44, 35–48. [Google Scholar] [CrossRef]
- Atkins. Rooks Nest Farm Landslide Assessment; Atkins: London, UK, 2012. [Google Scholar]
- Forster, A.; Hobbs, P.R.N.; Cripps, A.C.; Entwistle, D.C.; Fenwick, S.M.M.; Raines, M.R.; Hallam, J.R.; Jones, L.D.; Self, S.J.; Meakin, J.L. Engineering Geology of British Rocks and Soil: Gault Clay; British Geological Survey: Nottingham, UK, 1994.
- Garrett, C.; Barnes, S.J. The design and performance of the Dunton Green retaining wall. Geotechnique 1984, 34, 533–548. [Google Scholar] [CrossRef]
- Mouchel & Partners Ltd. M25 Improvements Between Junction 2 and Junction 8; Highways Agency: Guildford, UK, 1991.
- Garthwaite, M.; Nancarrow, S.; Hislop, A.; Thankappan, M.; Dawson, J.; Lawrie, S. Design of Radar Corner Reflectors for the Australian Geophysical Observing System; Geoscience Australia: Symonston, Australia, 2015; Volume 3.
- Ettus Research. E310/E312. 2023. Available online: https://kb.ettus.com/E310/E312 (accessed on 16 May 2024).
- DJI. Support for Matrice 600 Pro. DJI. 2024. Available online: https://www.dji.com/uk/support/product/matrice600-pro (accessed on 16 May 2024).
- Chen, Z.N.; Qing, X.; Sun, M.; Gong, K.; Hong, W. 60-GHz antennas on PCB. In Proceedings of the 8th European Conference on Antennas and Propagation (EuCAP 2014), The Hague, The Netherlands, 6–11 April 2014. [Google Scholar]
- Walbeoff, A.; Langley, R.J. Multiband PCB antenna. IEE Proc.-Microw. Antennas Propag. 2005, 52, 471–475. [Google Scholar] [CrossRef]
- Ren, W.; Deng, J.Y.; Chen, K.S. Compact PCB monopole antenna for UWB applications. J. Electromagn. Waves Appl. 2007, 21, 1411–1420. [Google Scholar] [CrossRef]
- Ghassemi, N.; Wu, K. Millimeter-wave integrated pyramidal horn antenna made of multilayer printed circuit board (PCB) process. IEEE Trans. Antennas Propag. 2012, 60, 4432–4435. [Google Scholar] [CrossRef]
- Wu, Q.; Scarborough, C.P.; Martin, B.G.; Shaw, R.K.; Werner, D.H.; Lier, E.; Wang, X. A Ku-Band Daul Polarization Hybrid-Mode Horn Antenna Enabled by Printed-Circuit-Board Metasurfaces. IEEE Trans. Antennas Propag. 2013, 61, 1089–1098. [Google Scholar] [CrossRef]
- Lashab, M.; Hraga, H.I.; Abd-Alhameed, R.A.; Zebiri, C.; Benabdelaziz, F.; Jones, S.M.R. Horn Antennas Loaded with Metamaterial for UWB Applications. In Proceedings of the Progress in Electromagnetics Research Symposium Proceedings, Marrakesh, Morocco, 20–23 March 2011. [Google Scholar]
- Lashab, M.; Zebiri, C.; Benabdelaziz, F.; Jan, N.A.; Abd-Alhameed, R.A. Horn antennas loaded with metamaterial for Ku band application. In Proceedings of the 2014 International Conference on Multimedia Computing and Systems (ICMCS), Marrakesh, Morocco, 14–16 April 2014. [Google Scholar]
- Rahman, S. Focusing Moving Targets Using Range Migration Algorithm in Ultra Wideband Low Frequency Synthetic Aperture Radar; Blekinge Institute of Technology: Karlskrona, Sweden, 2010. [Google Scholar]
- Hosseiny, B.; Amini, J.; Esmaeilzade, M.; Nekoee, M. Range migration algorithm in the processing chain of signals of a ground-based sar sensor. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 521–525. [Google Scholar] [CrossRef]
- European Space Agency (ESA). COSMO-SkyMed. Available online: https://earth.esa.int/eogateway/missions/cosmo-skymed (accessed on 12 February 2023).
- European Space Agency (ESA). COSMO-SkyMed Second Generation. Available online: https://earth.esa.int/eogateway/missions/cosmo-skymed-second-generation (accessed on 12 February 2023).
- European Space Agency (ESA). TerraSAR-X and TanDEM-X. Available online: https://earth.esa.int/eogateway/missions/terrasar-x-and-tandem-x (accessed on 12 February 2023).
- European Space Agency (ESA). PAZ. Available online: https://earth.esa.int/eogateway/missions/paz (accessed on 12 February 2023).
- European Space Agency (ESA). Sentinel-1 Mission Summary. Available online: https://sentinels.copernicus.eu/web/sentinel/missions/sentinel-1/overview/mission-summary#:~:text=Wave%2DMode%3A%2020%20x%2020,x%205%20m%20spatial%20resolution (accessed on 12 February 2023).
- Canadian Space Agency (CSA). RADARSAR Technical characteristics. 2021. Available online: https://www.asc-csa.gc.ca/eng/satellites/radarsat/technical-features/characteristics.asp (accessed on 12 February 2023).
- Canadian Space Agency (CSA). RADARSAT Satellites: Technical Comparison. 2021. Available online: https://www.asc-csa.gc.ca/eng/satellites/radarsat/technical-features/radarsat-comparison.asp (accessed on 12 February 2023).
- Japan Aerospace Exploration Agency (JAXA). ALOS-2 Project/PALSAR-2. Available online: https://www.eorc.jaxa.jp/ALOS-2/en/about/palsar2.htm (accessed on 12 February 2023).
- European Space Agency (ESA). SAOCOM. Available online: https://earth.esa.int/eogateway/missions/saocom (accessed on 12 February 2023).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Zone | Sub-Zone | Risk Rating | Landslide System in Figure 4 | |
|---|---|---|---|---|
| Number | Name | |||
| Flint Hall Farm | 1 | Landslide | Low risk, with medium risk of creep failures | Flint Hall Farm Landslide |
| 2 | Flower Lane cutting | |||
| 3 | South | Low risk | Flint Hall Farm South Landslide | |
| Midslope | 1 | North | Medium to high risk | N/A |
| 2 | South | Low risk | ||
| Rooks Nest Farm | 1 | Landslide North | Medium risk | Rooks Nest Farm Landslide |
| 2 | Landslide South | Low risk, with medium risk of creep failures | ||
| 3 | Northeast | N/A | ||
| 4 | Southeast | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Carpenter, A.; Lawrence, J.A.; Mason, P.J.; Ghail, R.; Agar, S. Drone SAR Imaging for Monitoring an Active Landslide Adjacent to the M25 at Flint Hall Farm. Remote Sens. 2024, 16, 3874. https://doi.org/10.3390/rs16203874
Carpenter A, Lawrence JA, Mason PJ, Ghail R, Agar S. Drone SAR Imaging for Monitoring an Active Landslide Adjacent to the M25 at Flint Hall Farm. Remote Sensing. 2024; 16(20):3874. https://doi.org/10.3390/rs16203874
Chicago/Turabian StyleCarpenter, Anthony, James A. Lawrence, Philippa J. Mason, Richard Ghail, and Stewart Agar. 2024. "Drone SAR Imaging for Monitoring an Active Landslide Adjacent to the M25 at Flint Hall Farm" Remote Sensing 16, no. 20: 3874. https://doi.org/10.3390/rs16203874
APA StyleCarpenter, A., Lawrence, J. A., Mason, P. J., Ghail, R., & Agar, S. (2024). Drone SAR Imaging for Monitoring an Active Landslide Adjacent to the M25 at Flint Hall Farm. Remote Sensing, 16(20), 3874. https://doi.org/10.3390/rs16203874