1. Introduction
Plants and animals, by occupying new habitats, develop natural population strategies; this process is naturally limited by the availability of suitable habitats and species interactions. Moreover, natural barriers and ecological corridors are disrupted by human activities, thereby increasing the scale and extent of the spread of invasive species, leading to the displacement of representatives of native fauna and flora, changing the stability of the ecosystem [
1]. The extinction of indigenous species and the destruction of biodiversity is so significant that it is regulated by international and domestic law. In 2014, the European Union (EU) issued Regulation No. 1143/2014 (with subsequent updates) on the prevention and management of the introduction and spread of invasive alien species. Goldenrod (
Solidago spp.) is not currently on lists of the most threatening native plant species, but its lush and long flowering period significantly distracts some native pollinators (wasps, bees, bumblebees, butterflies, and beetles) adapted to native flowering plant species, the disappearance of which causes a decline in the populations of the insect representatives concerned. The goldenrods spread large numbers of seeds and reproduce vegetatively; moreover, their allopatric properties inhibit germination and nutrient uptake and growth of neighboring plants [
2]. The presence of honey-giving goldenrod flowers in devastated areas allows the presence of some insect species, while at the same time their essential oils (EOs) negatively affect plant growth and development [
3], e.g., substances from
Solidago canadensis leaves were the most poisonous to flies (
Musca domestica) and mosquitoes (
Culex quinquefasciatus), while oils from
Solidago gigantea leaves were poisonous to
Spodoptera littoralis larvae. The above elements mean that goldenrod is considered a moderately invasive species, but it is widely distributed [
4], which leads to the systematic transformation of habitats from which indigenous plants, insects, and the rhizosphere are eliminated [
5]. Invasions start from small, local areas, usually entering under canopies of trees and bushes, which makes it difficult to identify emerging individuals, but they regularly occupy new areas. An interest in using remote sensing to identify invasive and expansive species has increased significantly in recent years due to open source tools and data that are characterized by high temporal, spatial, and spectral resolution, allowing the identification of plant species and communities at local and regional scales (without interpolation) [
6,
7]. This is important for tracking the dynamics of invasion and an assessment of threats to biodiversity. Most works have used aerial data or high-resolution satellite imagery; Sabat-Tomala et al. [
8], based on airborne hyperspectral HySpex images, Random Forest (RF), and Support Vector Machine (SVM) algorithms, classified three species of expansive and invasive plants (including
Solidago spp.) with accuracy of around 0.90 (F1-scores), emphasizing that the results obtained for spring, summer, and autumn images were similar, and the fusion of all the data allowed goldenrod to be mapped with an F1-score of 0.99. However, it is still a challenge to develop a method for identifying the early stages and new outposts of the invasion, consisting of spectrally heterogeneous objects [
8]. This problem was analyzed by Rizaludin Mahmud et al. [
9], identifying goldenrod in the heterogeneous urban landscape of Japan. Using hyperspectral signatures, the authors developed the
Solidago altissima flower index (SAFI), which, combined with high-resolution WorldView-2 (WV-2) satellite images, allowed the identified spectral characteristics to be applied on a landscape scale. This method was based on the Maximum Likelihood algorithm, scoring an overall accuracy of 72% (OA) [
9]. Akandil et al. [
10] identified
Solidago gigantea using high-resolution multispectral images acquired with a drone. The images were captured during the peak of a goldenrod bloom in August, distinguishing homogeneous patches on the basis of visual interpretation. The Maximum Likelihood algorithm classified goldenrod with 95% producer accuracy (PA) and user accuracy (UA). A different approach in terms of the date of acquisition of the images, falling in spring before the development of goldenrod flowers, but also using AISA aerial hyperspectral images, was proposed by Ishii and Washitani [
11]; the General Linear Model algorithm classified the first three MNF bands (after Minimum Noise Fraction transformation), achieving 94% UA and 80% PA. The results obtained for
Solidago altissima suggest that hyperspectral data recorded in early spring may be a valuable asset in detecting invasion footholds before other plant species develop in the study area. The same observation was confirmed by Sabat-Tomala et al. [
8] based on airborne HySpex images.
Previous work on goldenrod mapping focuses mainly on high-resolution aerial images, e.g., the above-cited UAV [
10] or hyperspectral [
8] studies, which offer good results but, due to the range of the acquired images, they concern only small case studies. Therefore, a much more important element is the verification of medium-resolution satellite images and the early detection of invasion footholds, i.e., the first stages that will allow the identification of small and heterogeneous patches. Another problem is the compactness of patches of invasive species, which often reproduce through underground roots or produce big numbers of seeds that are dispersed far by wind, allowing them to quickly colonize new areas, e.g., along expressways and railway routes. These areas are difficult to identify, because there is a heterogeneity of technical infrastructure and plants, and some plants do not dominate in the canopy, but constitute dangerous sources of invasion, e.g., hiding in bushes, woodlots, under plant canopies, and other places where mowing machines do not have access.
Being a part of the European Space Agency (ESA) Copernicus program, the Sentinel-2 mission is invaluable for monitoring. The Sentinel-2A and Sentinel-2B satellites offer a shortened revisit time of up to 5 days (10 days at the equator with one satellite) and a wide swath of imaging reaching 290 km using the MultiSpectral Instrument (MSI) and offering 13 spectral bands, with a spatial resolution of 10 m, 20 m, and 60 m (
Table 1) [
12]. The images are valuable to a wide range of applications especially since the data are free, corrected, and well provided via the Copernicus Data Access Service platform [
13].
PlanetScope, a project by Planet Labs, has revolutionized the availability of satellite data with its constellation of CubeSats [
14]. It provides daily acquisition and high spatial resolution, e.g., the currently operated SuperDove sensor offers a 3.7 m pixel size (32.5 km × 19.6 km), covering 20,000 km
2 as a maximum image strip per orbit, which enables the capture of up to 200 million km
2 of Earth’s surface every day via the 130-satellite PlanetScope constellation, which are located on 450–580 km orbits [
15,
16]. The SuperDove satellites, part of the third generation of the fleet, are equipped with the PSB.SD instrument, which captures eight spectral bands with 16-bit radiometric resolution (
Table 1). PlanetScope images are available at various processing levels, with Level 3B offering images after radiometric correction, geometric correction, and orthorectification [
16]. Although PlanetScope data are commercial, the company provides access for educational and research purposes through the Planet’s Education and Research Program [
17].
Both systems, Sentinel-2 and PlanetScope, have unique features and applications. Sentinel-2 is irreplaceable in projects requiring a broad spectral range (especially NIR and SWIR), frequent revisit times, and multiscale environmental monitoring. Conversely, PlanetScope provides frequent data updates with high spatial resolution, which is key for quick responses to changes, where data recency and frequency are a priority.
The topic of identifying other expansive and invasive plant species in Sentinel-2 data is described in [
18,
19]. Sentinel-2 images offer high temporal resolution, allowing the capture of the different stages of phenological development of invasive plants in relation to native species, which is one of the key elements of the strategic advantage of alien species over native plants. Sentinel-2 thus fills the time gaps caused by the lack of airborne hyperspectral data [
20], providing valuable data to conduct monitoring on regional and continental scales and significantly reducing costs [
21].
In our studies, we focus on RF and SVM classifiers, because these classifiers allow the analysis of a significant amount of input data, which is important in the identification of plant species that change during the growing season. Additionally, the process of optimizing classification parameters is relatively simple and fast, and the results obtained achieve high accuracy. RF, especially, offers high efficiency in identifying changing vegetation, and requires a relatively small number of training patterns (300–700 pixels). But in the literature, there is a belief that deep learning methods offer better classification results, so below we would like to point out that many studies do not confirm this opinion, especially in the case of heterogeneous vegetation. In the case of deep learning networks, if the amount of entered data is large, the optimization and classification time is significantly extended compared to the use of machine learning algorithms [
22,
23,
24]. Due to an independence and automatic selection of the training set in neural networks, there is a risk of over-fitting the model, as well as the selection of irrelevant training samples [
23,
25]. Often, the use of deep learning requires much more data to train the network than in the case of other algorithms in the field of artificial intelligence [
25,
26]. Subsequently, the selection of matching spectral bands is a challenge to prepare a well-functioning model, because most often the training of the network takes place on a limited number of bands, and expanding it with a larger number is extremely time-consuming and requires increased memory for relearning, which traditional machine learning algorithms do not have to deal with [
27]. The authors [
23,
28] pointed to the lower performance of neural networks than algorithms such as SVM or RF in the case of noisy data; heterogeneous classes are also a problem in deep learning, as the boundaries of individual classes are distorted and the inability to distinguish different pixels within a class treated as a large patch becomes apparent [
24,
29]. Lake et al. [
30] identified leafy spurge (or wolf’s milk leafy spurge;
Euphorbia virgata, which is also an invasive yellow flowering plant in the US) based on a deep learning network (CNN) and high-resolution images of WorldView-2 (eight bands) and PlanetScope (four spectral bands, 3 m spatial resolution). The obtained overall accuracy was 96.3% based on CNN + Long Short-Term Memory (LSTM), while for the variant considering only CNN, the accuracy of PlanetScope data classification was 89.9% and, for WorldView-2, it was 96.1%.
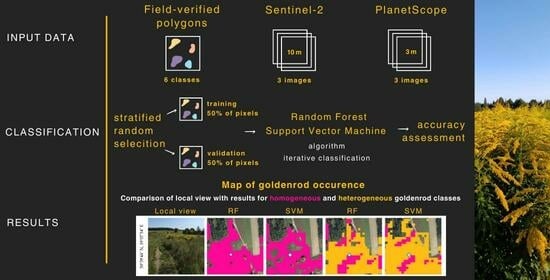
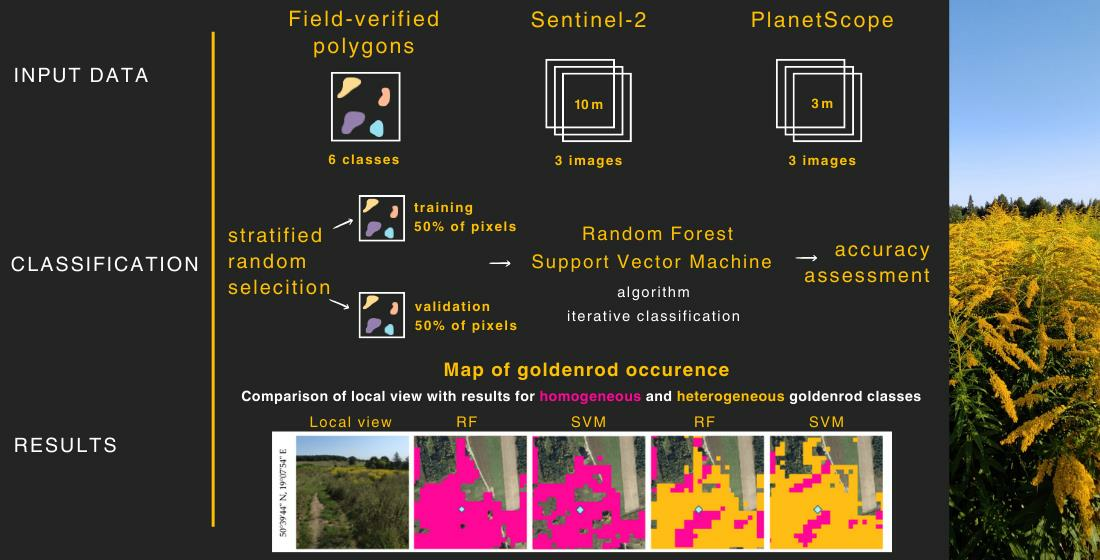
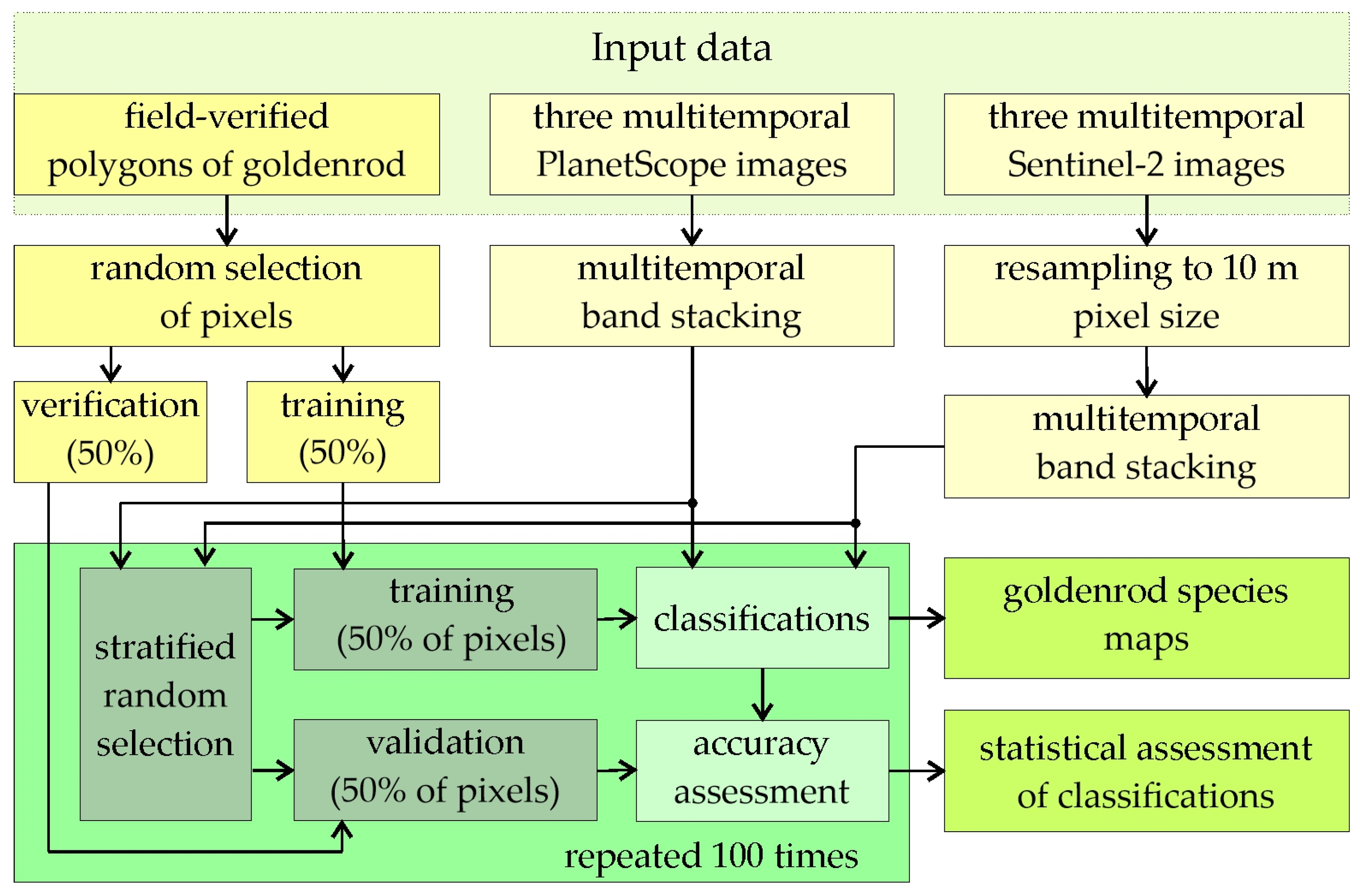
The aim of this paper is to assess the usefulness of widely available Sentinel-2 and high-resolution commercial PlanetScope multispectral data, as well as the Random Forest (RF) and Support Vector Machine (SVM) algorithms for the identification of goldenrod (Solidago spp.). Previous methods of monitoring goldenrod were based on traditional botanical research, which is burdened with high costs and is time-consuming; hence, in many countries, orthophotomaps, airborne imaging, or high-resolution satellite images are used to identify goldenrod at local scales. Due to the nature of the plants investigated, which form heterogeneous polygons with native species during the first stages of the invasion, the research challenge was to assess the accuracy of the classified patches. Various scenarios were tested, including the random selection of a different number of pixels (in 100 repetitions of iterative classification), using entire polygons with the dominant share of goldenrod, but also polygons where goldenrod was beginning to appear, creating different mix patterns.
3. Results
The classification results confirmed that goldenrod creates spectrally characteristic patterns, which, regardless of the algorithm used, are correctly identified on both the Sentinel-2 and PlanetScope images; the highest F1-score accuracies of individual iterations oscillated around 0.92–0.95 (
Table 3 and
Table 4). Nevertheless, spatial differentiations of the share of individual objects (goldenrod, grasses, herbaceous plants, bushes, single trees) generated varied signals for different patches, and this was reflected in the results of individual iterations of different scenarios (
Figure 5). The Random Forest classifier produced better results than SVM, and this concerned both the number of classification iterations obtaining F1-score values above 0.90, as well as the median and mean values for all 100 iterations (
Table 3 and
Table 4,
Figure 5), and the increase in the number of training pixels reduced the worst classification results, allowing an increase in the median and mean F1-score values of Sentinel-2 data (
Figure 6). SVM in individual iterations obtained high values of the classification, but it was surprising that in the case of the PlanetScope images, the median of 100 iterations reached only the value of a 0.43 F1-score (
Figure 7,
Table 4).
The median value for patterns consisting of at least 400 training pixels indicated an optimal pixel value range of around 400–700 pixels for the recognition of goldenrod (
Table 3 and
Table 4,
Figure 6 and
Figure 7). In the case of the PlanetScope data, there is clearly no improvement in the lowest classification values (
Figure 7). Reportedly, low classification values occur regardless of the number of pixels used in the training patterns, and this phenomenon was not observed in the case of the Sentinel-2 data (
Table 3); this is due to the small pixel size of the PlanetScope images, which allows the identification of small areas in the initial stages of invasion that do not contain goldenrod (
Table 4).
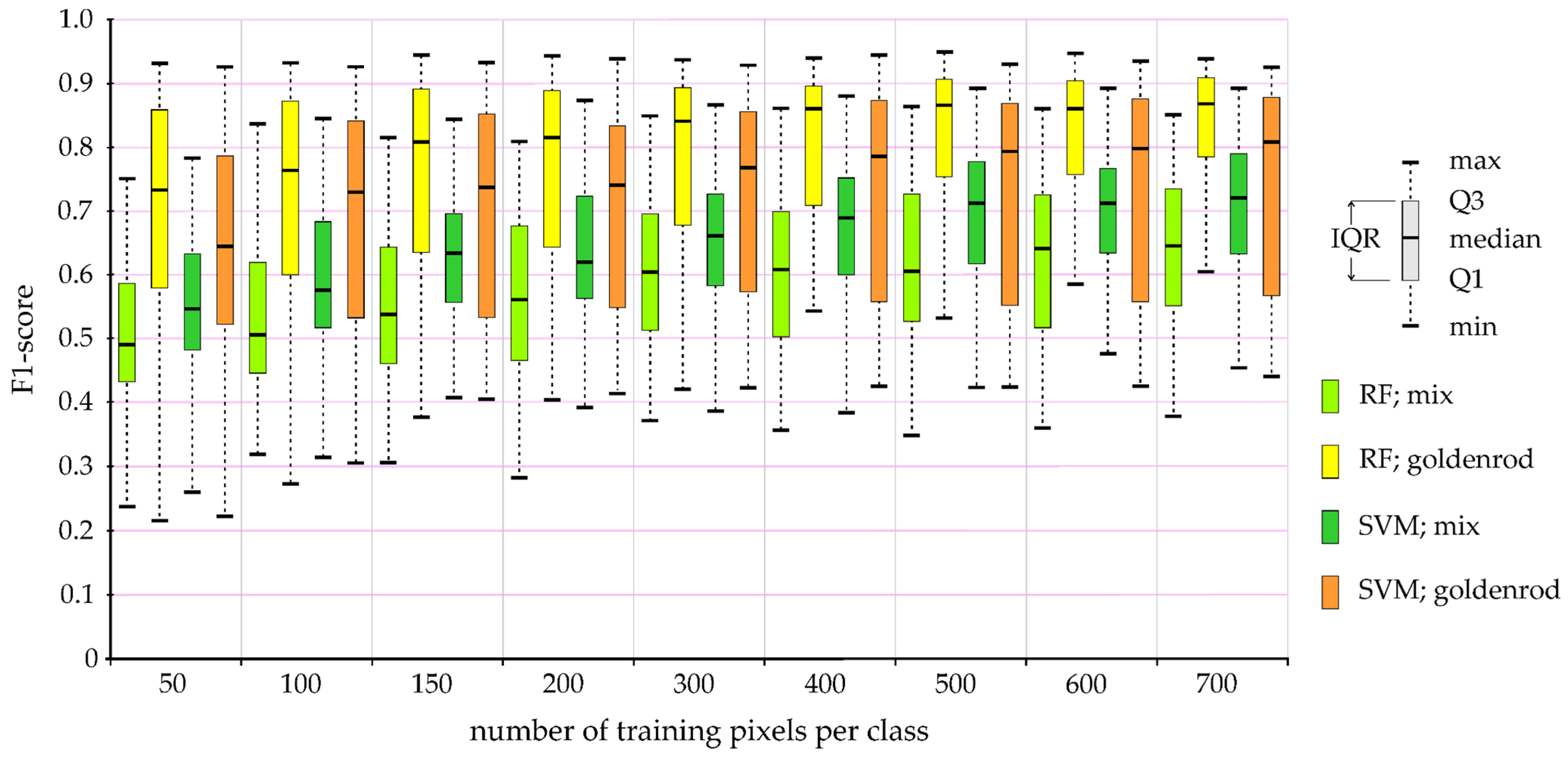
Analyzing the impact of the number of training pixels on the obtained goldenrod classification results (
Figure 6), it is clearly visible that regardless of the classifiers (RF or SVM), the maximum classification accuracy of polygons dominated by goldenrod (marked as yellow and orange in
Figure 6) reaches similar values, which means that the training and verification field-verified patches are sufficiently homogeneous to identify goldenrod even on the 50 to 700 pixels of the Sentinel-2 data (
Table 3), and 50–1000 pixels of PlanetScope (
Table 4). Nevertheless, apart from more homogeneous surfaces (identified as goldenrod), there are also heterogeneous patches (marked as “mix” class; covered by other elements of land cover, where goldenrod occupies the area in minority), which are an important indicator of invasion directions. To identify such polygons, the number of training pixels should reach 500–700. In the case of the mix class, the median F1-score exceeds 0.70, with SVM producing significantly better results (by about 10 percentage points) than RF, but increasing the training pixels significantly improves the lowest classification accuracy (
Figure 6 and
Figure 7). This allowed the identification of the mix class in the best iterations with an accuracy of almost 0.90 for the SVM classifier, while RF achieved the best results at the level of 0.85 (F1-score). For this reason, the results presented below come from the RF classifier and are based on classifications obtained from patterns consisting of 700 training pixels, randomly selected in 100 subsequent iterations.
It is worth noting that the Sentinel-2 images, which contain several NIR and SWIR bands, offer much higher accuracy (around 20 percentage points) than the PlanetScope data (
Figure 5). This difference may be due to the fact that PlanetScope has only one NIR band (B8), which turned out to be crucial for both sensors (the most informative in the case of PlanetScope, and in the case of Sentinel-2, the band B9 scored second place;
Table 5); additionally, the SWIR band (B12), which is not present in the PlanetScope scanner, and also coastal aerosol, green, red, and red-edge were crucial. Based on the fact that for both Sentinel-2 and PlanetScope, the optimal period for the identification of goldenrod was the period of intense yellow flowering, and the PlanetScope scanner offers the yellow band (B5), the MDA analysis confirmed the usefulness of the B5 in summer during goldenrod flowering, while late autumn images were much less informative (
Table 5).
Based on the Sentinel-2 images and the Random Forest classifier, 898.54 km
2 of mixed patterns (initial stages of goldenrod infestation, which remain in the minority) has been identified, which is 7.45% of the Sentinel-2 image area, while the area where goldenrod dominates other plants is 90.84 km
2 (0.75%;
Figure 8,
Figure 9 and
Figure 10).
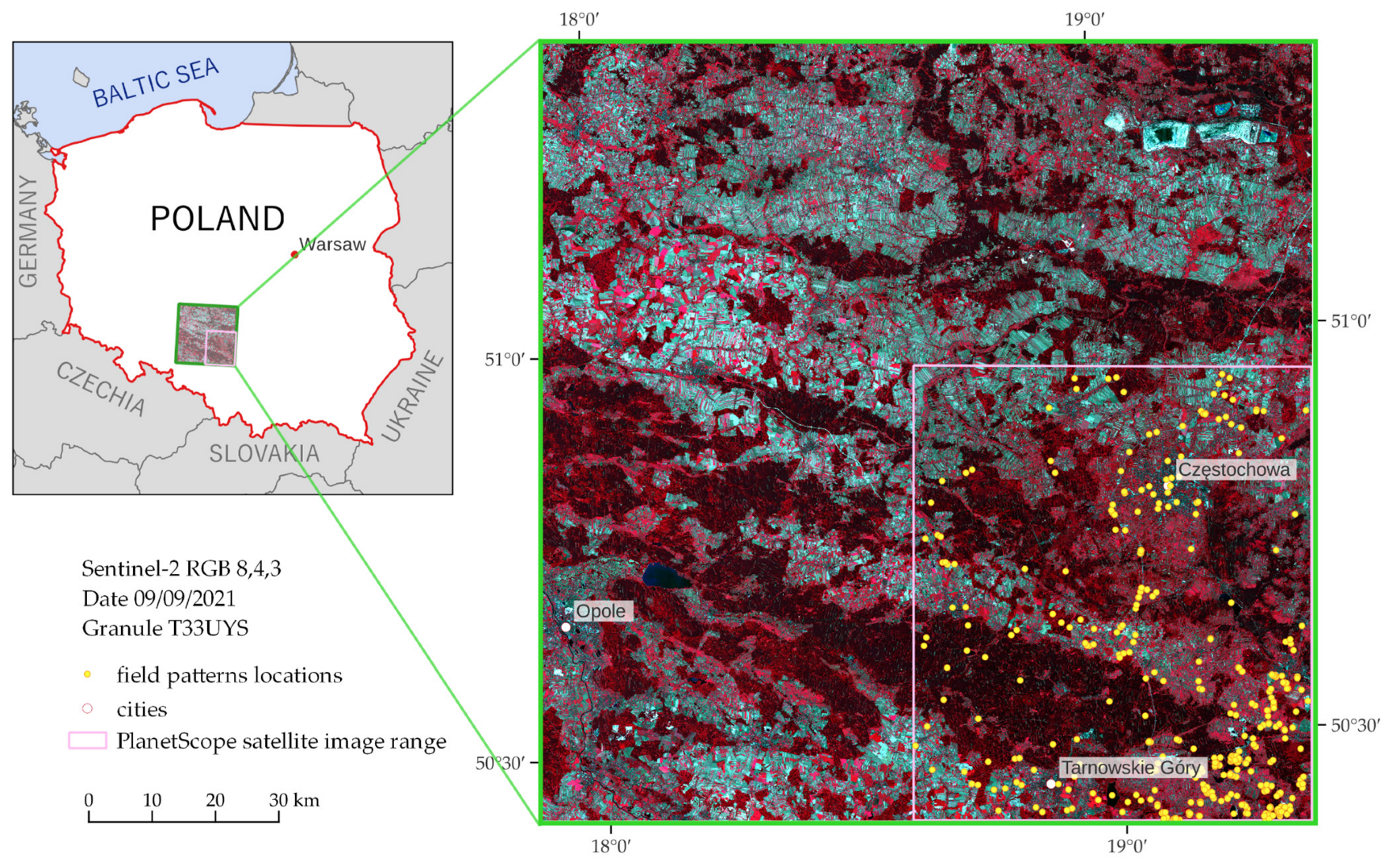
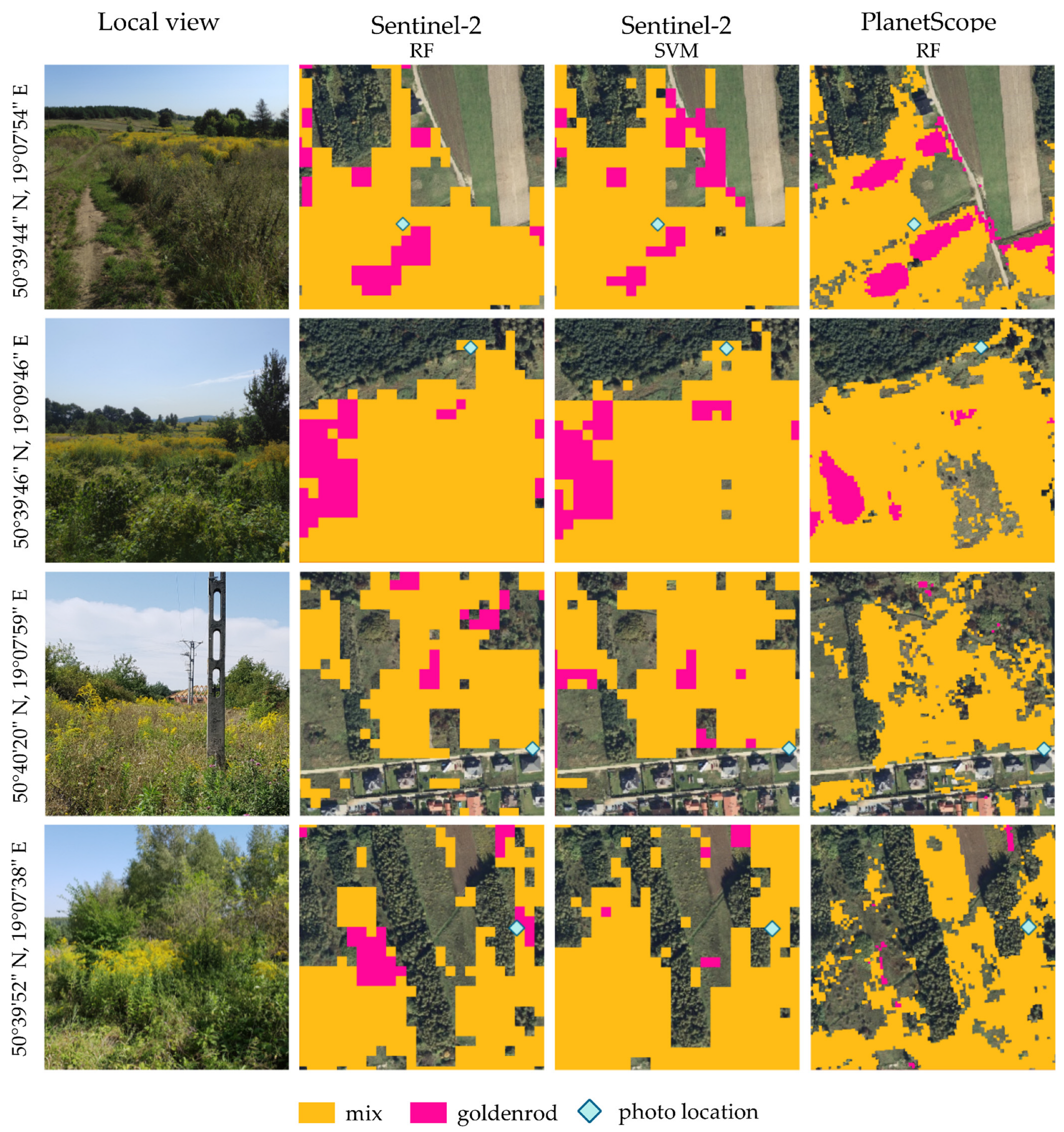
This area was quite well verified during field research in 2021 and 2022, confirming, on the one hand, a large and fast expansion of goldenrod, but on the other hand, many preventive activities were observed, e.g., mowing and plowing fields where goldenrod appeared. These areas are mainly located in the eastern part of the research area, in the vicinity of big cities (Częstochowa, Tarnowskie Góry, and the northern part of the Silesian agglomeration), where part of the area is intended for the development of new technical infrastructure, e.g., logistics centers, and commercial, service, and production facilities; this is due to optimal location in relation to motorways. The second reason for this is the presence of many post-industrial and post-mining residues, as well as post-agricultural areas, which are automatically entered through secondary succession.
Approximation to selected areas is confirmed by the common occurrence of goldenrod, and the difference in detection is mainly due to the resolution of the images; on the one hand, the three-meter PlanetScope images are characterized by greater spatial accuracy, but they lack the NIR and SWIR ranges, which turn out to be valuable, and PlanetScope’s yellow band (B5) was relatively important only in the flowering phase (
Table 5).
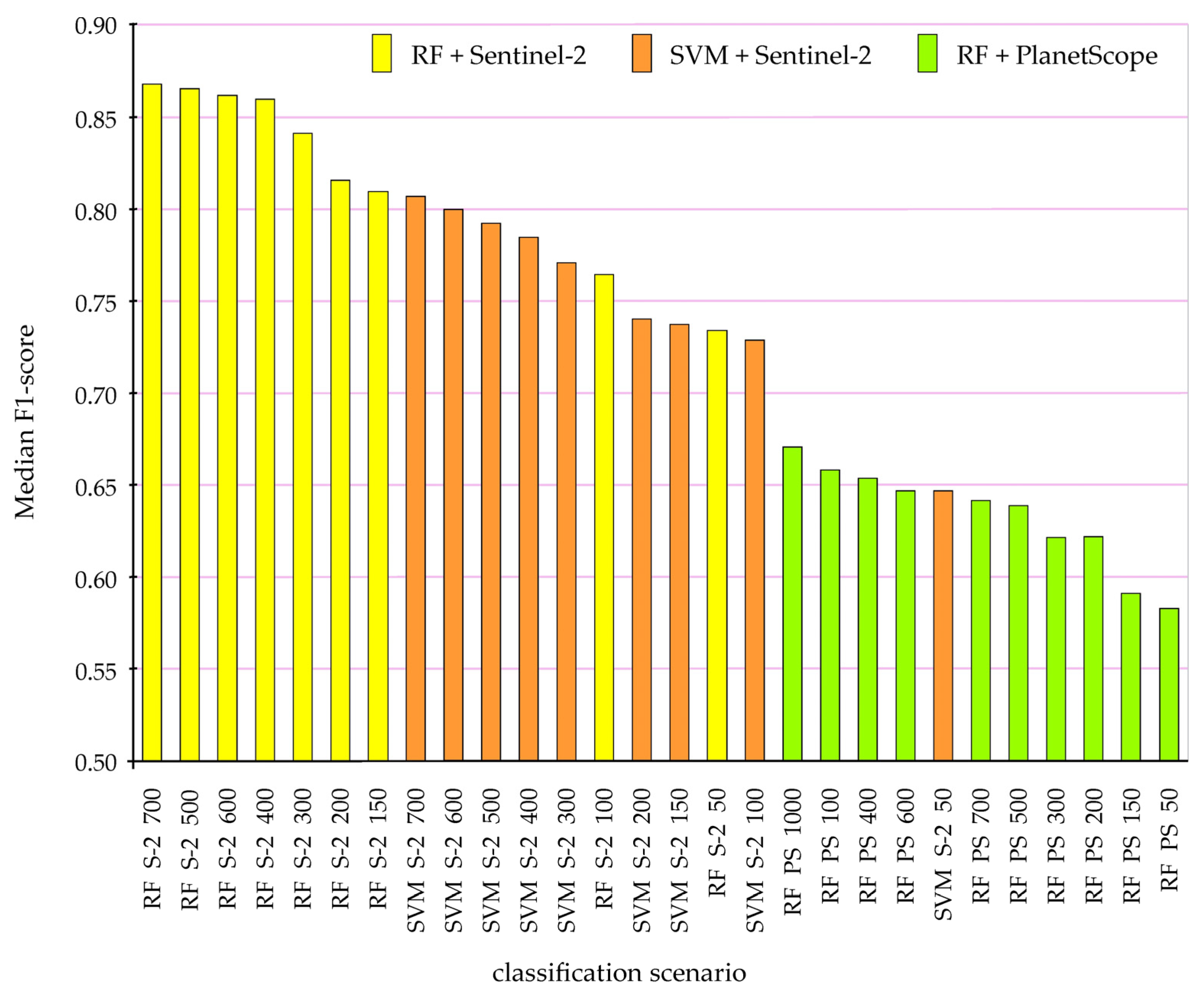
Based on tens of thousands of pixels verified in the field (
Table 2), the classification results confirm the high usefulness of the proposed methodology, because the three highest results of 100 individual classification iterations of both RF and SVM for Sentinel-2 and PlanetScope data, regardless of whether these classifications were based on 50–700 (Sentinel-2) or 50–1000 (PlanetScope), obtained F1-scores ranging from 0.90 to 0.95 (
Table 3 and
Table 4). However, differences were observed for the median results, where for 700 pixels, the highest classification value was obtained for RF and Sentinel-2 (F1-score: 0.87), SVM (Sentinel-2): 0.81, RF (PlanetScope): 0.64, and SVM (PlanetScope): 0.42 (
Table 3 and
Table 4). The obtained error matrices (
Table 6) confirm the distinguishability of individual spectral features of the analyzed objects, including goldenrod and heterogeneous patches created by them during invasion. Slight mixing of classification results is beyond doubt, as goldenrod encroaches on all surrounding surfaces, including the immediate vicinity of houses, yards, and gardens.
4. Discussion
Both Sentinel-2 and PlanetScope images produced very high accuracies of goldenrod classification; in each case, homogeneous patches of goldenrod produced the highest RF and SVM classification results > 0.9 measured using the F1-score, but looking in detail, regarding RF and scenarios involving training patterns consisting of 400 pixels, the achieved results of F1-scores > 0.9 were produced 22 times (out of 100 classification iterations). For patterns consisting of 500 pixels, it was 31 times, 600 was 28 times, and 700 was 35. For the SVM algorithm, it was 10 times for patterns consisting of 400 pixels, 6 times for 500 pixels, 13 for 600, and 13 for 700; regarding the median values for RF and a pattern consisting of 700 pixels, the F1-score was 0.87, and for SVM, it was 0.81. In the case of PlanetScope, the regularities are similar, i.e., RF turns out to be better, because for the classification results based on 400, 500, 600, 700, and 1000 training pixels, the obtained classification results were measured 16, 16, 16, and 20 times, respectively, using an F1-score > 0.9, while for the SVM algorithm, it was 8, 8, 9, 12, and 7 times. What is noteworthy is the maximum F1-score value, which is similar for the Sentinel-2 results, while the medians are significantly lower, because for RF and classification based on 700 pixels, it was 0.64 (F1-score), and for SVM, it was 0.42. Therefore, an analysis of the influence of the number of pixels on the classification result allowed the definition of the required number of patterns, which are obligatory for field verifications.
Attention should be drawn to reasons for the situation that PlanetScope is characterized by nine times higher spatial accuracy than Sentinel-2 images (it is worth remembering that some of the bands have been resampled from the original resolution of 20 m and 60 m to 10 m), and yet the median PlanetScope classification accuracy is lower; therefore, the mean decrease in accuracy (MDA) confirmed that the most informative spectral range was NIR (for PlanetScope, it is in first place (the most informative band), for Sentinel-2, it is in second place); however, comparing the different periods of image acquisition (reflecting different vegetative stages of goldenrod), the most useful Sentinel-2 bands were the green, red-edge, and NIR (B9) bands, at the same time for which the corresponding PlanetScope bands did not show significant input. Dao et al. [
40], analyzing invasive grassland species, confirmed that statistically important spectral ranges were especially the blue (below 500 nm), red-edge (680–730 nm), and near-infrared (NIR, beyond 730 nm). This was not confirmed by Mouta et al. [
41], who identified the invasive species
Acacia longifolia using Sentinel-2 images, and ecological models demonstrated the usefulness of the blue (458–523 nm) and green (543–578 nm) channel, in which the yellow flowers of
Acacia as well as other yellow plants can be better distinguished due to the high presence of carotenoids and other pigments. This observation was not confirmed in our research, because the yellow range of the PlanetScope (B5) obtained an MDA value of 11.39 during flowering, which was below the average (17.51;
Table 5); in the remaining periods, the usefulness of the yellow band was even lower, taking the last, eighth place in the ranking of all spectral channels offered with the PlanetScope detector. Gholizadeh et al. [
42] used the partial least squares linear discriminant analysis (PLSLDA) [
43] model to distinguish
Lespedeza cuneata (‘sericea’) from native species based on airborne imaging spectroscopy and vegetation functional traits with an overall accuracy of about 94%. Their results proved that the specific phenology and structure of invasive plants are important factors for their identification; for sericea, this was the distribution of photosynthetic and photoprotective pigments such as chlorophyll a + b and carotenoids, and for this reason, they indicated that bands from the PAR region are the most important. In addition, they highlighted the usefulness of red-edge, NIR, and SWIR to distinguish other invasive species, which also confirms our assumptions. Similar observations on eight species of natural high-mountain grasslands of the Tatra Mountains were made by Kycko et al. [
44], which, based on biophysical variables and spectral features obtained with the ASD FieldSpec 4 spectrometer, showed statistically significant differences for different ranges of the electromagnetic spectrum for individual plant species exposed to trampling and the same species located away from tourist trails. This was also confirmed for High-Arctic plant species [
45].
An interesting element was the comparison of the Random Forest and Support Vector Machine classifiers. RF is recommended due to the speed of the classification process, a simpler procedure for optimizing the classification process, and better classification results in the case of fewer training samples. On the other hand, SVM offered higher classification results, but the classification procedure was longer and required more training pixels. As other research has shown [
46], the use of neural network algorithms (including deep learning) offered comparable results, but on a smaller amount of input data; however, in the identification of species, it was more important to use multitemporal data to obtain the spectra in different periods of phenological development, which allows a more accurate identification of the studied species than even more advanced algorithms based on less spectral data.
In a small part of our research area, Sabat-Tomala et el. [
8], using airborne HySpex hyperspectral images (430 spectral bands with a resolution of one meter), which were acquired in three periods of the 2016 growing season, the beginning of flowering (June), the optimum of flowering (end of August), and the beginning of autumn (end of September), based on SVM and RF classifiers, identified goldenrod and three expansive plant species with slightly better accuracies (five percentage points higher). In our case, the best iterations of the multitemporal Sentinel-2 offered F1-scores of 0.92–0.95, while the median F1-score was 0.88, and in the three-meter PlanetScope images (3 × 8 spectral bands), the best results achieved similar values (0.92), while the median was about 20 percentage points lower, thus indicating less stability in the performance of classification algorithms for PlanetScope than for Sentinel-2, as also shown by Jensen et al. [
29]. Smerdu et al. [
47] used a single aerial orthophoto (RGB + NIR bands), Sentinel-2 multitemporal compositions, and an SVM classifier in their attempt to identify the invasive Japanese knotweed in Ljubljana’s heterogeneous urban landscape; the results for multitemporal composite scenes were seven percentage points higher than for single scenes (90% for Sentinel-2; 83% for aerial images). So, multitemporal satellite data offered similar results to single-scene airborne hyperspectral images, and were a few percentage points higher than few-spectral-band airborne orthophotomaps using the same classifiers (RF, SVM) [
48,
49]; this was also confirmed by Kluczek et al. [
35]. Similar results of leafy spurge (
Euphorbia virgata), which is also an invasive yellow flowering plant in the US, were achieved, with an overall accuracy of 96.3% (based on CNN + Long Short-Term Memory), while for the variant considering only CNN, the accuracy of PlanetScope data classification was 89.9%, and for WorldView-2, it was 96.1% [
30]. These results are identical to our all-goldenrod outcomes from the multitemporal Sentinel-2 and PlanetScope data based on the Random Forest classifier as well as SVM (but only for sets of 700 training pixels;
Figure 6 and
Figure 7), and higher than those achieved for another goldenrod species,
Solidago altissima, on the high-resolution WorldView-2 images (overall accuracy of 72%) [
9]. This result may suggest that the number of spectral bands is important, as WorldView-2 also has eight spectral bands, the same as PlanetScope, and thus achieves lower results than Sentinel-2, which also offers SWIR bands such as B11 (1610 nm) and B12 (2190 nm). Wang et al. [
50] concentrated on the classification of invasive
Pedicularis spp., using multitemporal Sentinel-2 data, reporting F1-scores ranging from 0.92 to 0.97, while PlanetScope achieved F1-scores in the range of 0.71 to 0.82, which is a similar observation to our ones, in that PlanetScope offers several percentage points lower than Sentinel-2. The researchers also stressed that the number of features is more important than the spatial resolution. Further attempts to compare Sentinel-2 data with PlanetScope were made by Marzialetti et al. [
51], who calibrated Random Forest models for both satellite platforms, showcasing high predictive performances with R2 > 0.6 and RMSE < 0.008. Although Sentinel-2 exhibited slightly superior performance, the PlanetScope-based model effectively delineated invaded areas.
In the case of the extensive comparisons of Sentinel-2 and PlanetScope data, Kluczek et al. [
35] investigated the effectiveness of both satellite images (additionally airborne HySpex hyperspectral images) for the classification of montane woody species; the multitemporal Sentinel-2 data cube, comprising 21 scenes, delivered comparable results with HySpex (F1-scores of 0.93 for RF and 0.89 for SVM); in contrast, the three high-resolution PlanetScope images yielded less precise results, with F1-scores of 0.89 for RF and 0.87 for SVM. Very important in this case was the use of multitemporal data, which allowed the identification of plant species’ spectral properties along the vegetation period. The observation was confirmed by Zagajewski et al. [
39], who, using multitemporal Sentinel-2 data for woody species, achieved the best overall accuracies for SVM (86%; median), RF (84%), and ANN (84%), and for Landsat data, the best results were obtained for the RF classifier (84%), and the worst were for ANN (76%).
Also, the date of acquisition of the imagery is important as shown by Rakotoarivony et al. [
52], who focused on
Lespedeza cuneata and identified the optimal period for detection to be the mid-to-late growing season, achieving an overall classification accuracy of 81% (mid-August) and 82% (end of September) using PlanetScope data. The observation was also confirmed by Han et al. [
53] and Sabat-Tomala et al. [
8] in the case of goldenrod, bushgrasses, and blackberries.
Nevertheless, the key element is to provide appropriate training patterns in the heterogeneity of the patches they form in the studied ecosystems, which, taking into account the phase of vegetation development, allow the determination of the spectral characteristics of the tested plants, which allows the learned algorithm to assign individual pixels of the image to the required class. Sabat-Tomala et al. [
8] and Rizaludin Mahmud et al. [
9] have highlighted a need for field identification, but the achieved results allowed the identification of goldenrod with high accuracy, and high-resolution aerial data allow for constant monitoring of the directions of goldenrod invasion. In the case of Sentinel-2 data, due to the 10 m pixel, a good solution is to use the mix class, which allows mapping of surfaces with goldenrod in the initial stages.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}