

CoastalWQL: An Open-Source Tool for Drone-Based Mapping of Coastal Turbidity Using Push Broom Hyperspectral Imagery


Abstract
:1. Introduction
2. Materials and Methods
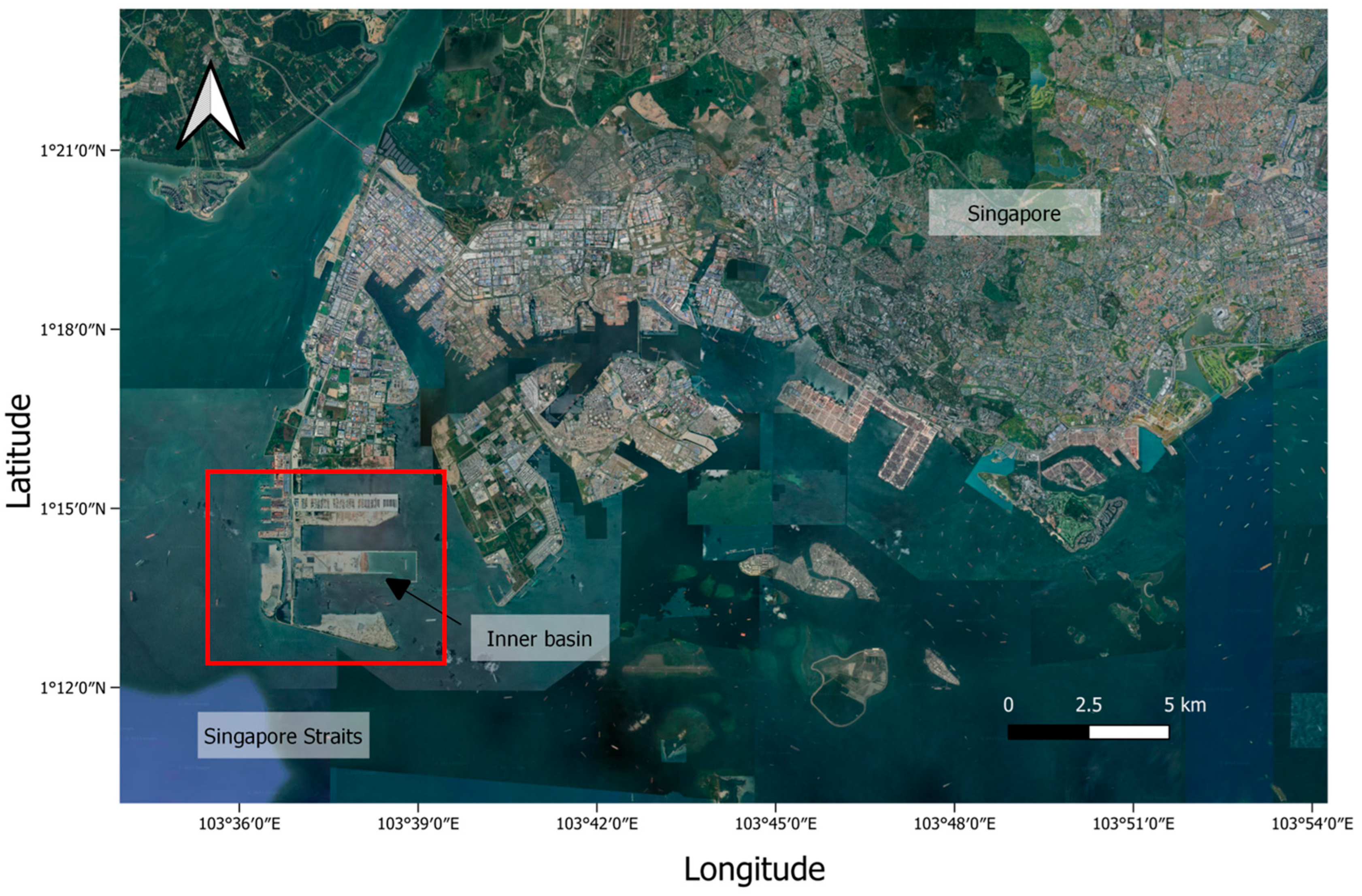
2.1. Study Site
2.2. UAV Flight Surveys and Data Acquisition
2.3. UAV Hyperspectral System
- A spectroradiometer (Flame VIS-NIR, Ocean Insight, Orlando, FL, USA) that covers the spectral range of 350 nm to 1000 nm was used for measuring the downwelling irradiance at one-second intervals.
- A GPS receiver module with a USB interface (U-blox 8 engine, U-blox, Thalwil, Switzerland) was used to record the geographic coordinates and the corresponding timestamps at every one-second interval.
- A commercial push-broom hyperspectral imager (HSI) (OCI-FTM, Bayspec, San Jose, CA, USA) that covers the spectral range of 400 nm to 1000 nm (visible to near-infrared) with 61 bands was used for imaging the scene. Its field of view is 19.3° (16 mm lens) with a sensor resolution of 1024× scan-length, and its spectral resolution (Full width at half maximum (FWHM)) is 5–7 nm.
- An onboard mini-computer (Intel NUC, Intel, Santa Clara, CA, USA) was connected to the spectroradiometer, GPS module, and push-broom HIS via USB. The mini-computer was used to calibrate the spectrometer using the OceanView software and calibrate the sensor using BaySpec’s SpecGrabber software in the field.
- A stabilising gimbal (Ronin MX gimbal, DJI, Shenzhen, China) to reduce any distortions to the image.
2.4. Image Mosaicking of Push-Broom Hyperspectral Imagery
2.5. Image Alignment Correction
2.6. Radiometric Correction
2.7. Sun Glint Correction
2.8. Removal of Stripe Noises
2.9. Masking and Classification
2.10. Assessment of Pre-Processing Methods with Turbidity Retrieval
3. Results
3.1. Evaluation of Image Pre-Processing Methods
3.1.1. Image Alignment
3.1.2. Radiometric Correction—Calibration Curve
3.1.3. Classification and Masking
3.1.4. Noise Removal—Sun Glint Correction and De-Striping
3.2. Evaluation of Individual Pre-Processing and Their Impact on Reflectance Spectrum
3.3. Evaluation of Individual Pre-Processing and Their Impact on Turbidity Retrieval
4. Discussion
4.1. Retrieval of Turbidity
4.2. Existing Limitations and Challenges in Image Mosaicking and Alignment
4.3. Comparisons with Existing Methods/Software

| Bayspec’s Cube Creator | VITO’s MapEO Water [21] | Agisoft Metashape, PIX4D Mapper | MosaicSeadron [22] | CoastalWQL | |
|---|---|---|---|---|---|
| (a) Software implementation | |||||
| Software environment | Windows | Cloud platform | Windows, Mac | Python notebook | Windows (GUI) via python script, python notebook |
| Sensor | Bayspec’s OCI-F | Micasense RedEdge-MX, DJI P4 multispectral | Micasense RedEdge-MX, Micasense Dual Camera System, etc. | DJI H20T sensor, DJI Mavic 2 Enterprise Advanced (M2EA) thermal sensor, Micasense Dual Camera System | Bayspec’s OCI-F |
| Data input | Push broom hyperspectral (binary file) | Snapshot multispectral (.tiff) | Snapshot multispectral/RGB (.tiff, PNG, JPEG, BMP, etc.) | Snapshot multispectral (.tiff) | Push broom hyperspectral (binary file) |
| Image dimensions | 1024 × 20 | 1280 × 960 (MicaSense), 5472 × 3648 (DJI P4) | Various e.g.,1280 × 960 (MicaSense), etc. | 1280 × 960 (MicaSense), 640 × 512 (M2EA and H20T) | 1024 × 20 |
| Open-source | No | No | No | Yes | Yes |
| (b) Pre-processing workflow | |||||
| Image mosaicking | Feature-based image mosaicking, e.g., SfM | Merging of rasters | Feature-based image mosaicking, e.g., SfM, image alignment | Merging of rasters | Image mosaicking along flight swath ([31]) (independent of scene’s features) |
| Georeferencing | Georeferencing via GPS coordinates, flight parameters | Direct-georeferencing | Georeferencing via image registration (e.g., GCPs) | Direct-georeferencing | Direct-georeferencing |
| Error rate in direct-georeferencing | NA (stitching failure over some scenes) (Appendix I) | Not published | NA | 2.51 m at GSD ~ 0.5 m/px | 2.69 m at GSD ~ 0.2 m/px |
| Conversion to reflectance product | Empirical relative radiometric correction | Radiometric conversion to convert DN into radiance, and into reflectance using [53] | Radiometric conversion to convert DN into radiance, and into reflectance (by providing reflectance panel) | NA | Empirical relative radiometric correction |
| Masking/classification | User-defined classification threshold for classification | Masking of non-water pixels | Additional user-defined processing | NA | Classification and masking of land/caisson and vessels |
| Image alignment | NA | NA | Image alignment via GCPs | NA | (optional) Time delay image alignment with real-time visualisation |
| Correction of intrinsic noises | NA | Correction of lens vignetting effects via MicaSense’s image processing library | Correction of lens vignetting effects (MicaSense imagery) | NA | De-striping |
| Atmospheric correction | NA | iCOR4Drones | NA | NA | NA |
| Sun glint correction | NA | NA | NA | NA | Modified SUGAR algorithm |
| Water quality product | NA | Turbidity, suspended sediments, chlorophyll | NA | NA | Turbidity |
4.4. Limitations of CoastalWQL and Future Directions
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Disclaimer
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Appendix B

Appendix C

Appendix D

Appendix E
| (i) Inputs | Data |
|---|---|
| Image folder | Path to the folder directory containing the folder of the raw hyperspectral images and the folder of GPS file, where the raw hyperspectral images are in .raw format, and GPS file is in .csv format. |
| Flight region in GUI | A GUI window where user can specify the range of flight regions to conduct mosaicking |
| Height | User-specified height (in metres) at which the drone operates and when imaging is conducted. GPS information entails the altitude information but not the height information, where altitude = height + altitude of surface topography |
| Spectrometer folder | A series of text files (.txt), each containing the absolute irradiance information (µW/cm2/nm) at wavelengths covering the entire spectral range of the hyperspectral camera |
| Water quality data | A csv file containing information of the in-situ water quality measurements. It should contain columns with the measurements of the water quality concentration, and two other columns with its corresponding latitude and longitude information |
| Trained model | An exported trained model in .JSON or .model (for XGBoost models) format that contains trained model parameters |
| (ii) Outputs | |
| False composite image | The user is given the flexibility to choose three wavelengths to represent the RGB channels. Output image has a .tif format |
| Masked image | An image that has been masked to conceal vessels at the study site for confidentiality |
| Geo-registered/georeferenced image | An image that has been transformed from the image coordinate space to the georeferenced coordinate space (.tif) |
| Extracted spectral information | If the water quality data is provided, spectral information is extracted based on the supplied coordinates |
Appendix F

Appendix G

Appendix H





Appendix I

References
- Kieu, H.T.; Law, A.W.K. Remote sensing of coastal hydro-environment with portable unmanned aerial vehicles (pUAVs) a state-of-the-art review. J. Hydro-Environ. Res. 2021, 37, 32–45. [Google Scholar] [CrossRef]
- Cheng, K.H.; Chan, S.N.; Lee, J.H.W. Remote sensing of coastal algal blooms using unmanned aerial vehicles (UAVs). Marine Pollut. Bull. 2020, 152, 110889. [Google Scholar] [CrossRef] [PubMed]
- Olivetti, D.; Roig, H.; Martinez, J.M.; Borges, H.; Ferreira, A.; Casari, R.; Salles, L.; Malta, E. Low-Cost Unmanned Aerial Multispectral Imagery for Siltation Monitoring in Reservoirs. Remote Sens. 2020, 12, 1855. [Google Scholar] [CrossRef]
- Hayes, M.; Puckett, B.; Deaton, C.; Ridge, J. Estimating Dredge-Induced Turbidity using Drone Imagery. Preprints 2022. [Google Scholar] [CrossRef]
- Kieu, H.T.; Pak, H.Y.; Trinh, H.; Pang, D.S.C.; Khoo, E.; Law, A.W.K. UAV-based Remote Sensing of Turbidity in Coastal Environment for Regulatory Monitoring and Assessment. Marine Pollut. Bull. 2023, 196, 115482. [Google Scholar] [CrossRef] [PubMed]
- Eljaiek-Urzola, M.; de Carvalho, L.A.S.; Betancur-Turizo, S.P.; Quiñones-Bolaños, E.; Castrillón-Ortiz, C. Spatial Patterns of Turbidity in Cartagena Bay, Colombia, Using Sentinel-2 Imagery. Remote Sens. 2024, 16, 179. [Google Scholar] [CrossRef]
- Bay, H.; Ess, A.; Tuytelaars, T.; Van Gool, L. Speeded-Up Robust Features (SURF). Comput. Vision Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vision 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An efficient alternative to SIFT or SURF. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Barcelona, Spain, 6–13 November 2011; pp. 2564–2571. [Google Scholar]
- Gao, H.; Yu, Y.; Huang, X.; Song, L.; Li, L.; Li, L.; Zhang, L. Enhancing the Localization Accuracy of UAV Images under GNSS Denial Conditions. Sensors 2023, 23, 9751. [Google Scholar] [CrossRef]
- Wu, D.; Li, R.P.; Zhang, F.Y.; Liu, J. A review on drone-based harmful algae blooms monitoring. Environ. Monit. Assess. 2019, 191, 1–11. [Google Scholar] [CrossRef]
- Gaffey, C.; Bhardwaj, A. Applications of Unmanned Aerial Vehicles in Cryosphere: Latest Advances and Prospects. Remote Sens. 2020, 12, 948. [Google Scholar] [CrossRef]
- Mishra, V.; Avtar, R.; Prathiba, A.P.; Mishra, P.K.; Tiwari, A.; Sharma, S.K.; Singh, C.H.; Yadav, B.C.; Jain, K. Uncrewed Aerial Systems in Water Resource Management and Monitoring: A Review of Sensors, Applications, Software, and Issues. Adv. Civil Eng. 2023, 2023, 3544724. [Google Scholar] [CrossRef]
- Papakonstantinou, A.; Moustakas, A.; Kolokoussis, P.; Papageorgiou, D.; de Vries, R.; Topouzelis, K. Airborne Spectral Reflectance Dataset of Submerged Plastic Targets in a Coastal Environment. Data 2023, 8, 19. [Google Scholar] [CrossRef]
- Isgró, M.A.; Basallote, M.D.; Barbero, L. Unmanned Aerial System-Based Multispectral Water Quality Monitoring in the Iberian Pyrite Belt (SW Spain). Mine Water Environ. 2022, 41, 30–41. [Google Scholar] [CrossRef]
- Kwon, Y.S.; Pyo, J.; Kwon, Y.H.; Duan, H.T.; Cho, K.H.; Park, Y. Drone-based hyperspectral remote sensing of cyanobacteria using vertical cumulative pigment concentration in a deep reservoir. Remote Sens. Environ. 2020, 236, 111517. [Google Scholar] [CrossRef]
- Lo, Y.; Fu, L.; Lu, T.C.; Huang, H.; Kong, L.R.; Xu, Y.Q.; Zhang, C. Medium-Sized Lake Water Quality Parameters Retrieval Using Multispectral UAV Image and Machine Learning Algorithms: A Case Study of the Yuandang Lake, China. Drones 2023, 7, 244. [Google Scholar] [CrossRef]
- Román, A.; Tovar-Sánchez, A.; Gauci, A.; Deidun, A.; Caballero, I.; Colica, E.; D’Amico, S.; Navarro, G. Water-Quality Monitoring with a UAV-Mounted Multispectral Camera in Coastal Waters. Remote Sens. 2023, 15, 237. [Google Scholar] [CrossRef]
- Su, T.C.; Chou, H.T. Application of Multispectral Sensors Carried on Unmanned Aerial Vehicle (UAV) to Trophic State Mapping of Small Reservoirs: A Case Study of Tain-Pu Reservoir in Kinmen, Taiwan. Remote Sens. 2015, 7, 10078–10097. [Google Scholar] [CrossRef]
- Xiao, Y.; Chen, J.H.; Xu, Y.; Guo, S.H.; Nie, X.Y.; Guo, Y.H.; Li, X.R.; Hao, F.H.; Fu, Y.H. Monitoring of chlorophyll-a and suspended sediment concentrations in optically complex inland rivers using multisource remote sensing measurements. Ecological Indicators 2023, 155, 111041. [Google Scholar] [CrossRef]
- De Keukelaere, L.; Moelans, R.; Knaeps, E.; Sterckx, S.; Reusen, I.; De Munck, D.; Simis, S.G.H.; Constantinescu, A.M.; Scrieciu, A.; Katsouras, G.; et al. Airborne Drones for Water Quality Mapping in Inland, Transitional and Coastal Waters-MapEO Water Data Processing and Validation. Remote Sens. 2023, 15, 1345. [Google Scholar] [CrossRef]
- Román, A.; Heredia, S.; Windle, A.E.; Tovar-Sánchez, A.; Navarro, G. Enhancing Georeferencing and Mosaicking Techniques over Water Surfaces with High-Resolution Unmanned Aerial Vehicle (UAV) Imagery. Remote Sens. 2024, 16, 290. [Google Scholar] [CrossRef]
- Jurado, J.M.; López, A.; Pádua, L.; Sousa, J.J. Remote sensing image fusion on 3D scenarios: A review of applications for agriculture and forestry. Int. J. Appl. Earth Obs. Geoinf. 2022, 112, 102856. [Google Scholar] [CrossRef]
- Sousa, J.J.; Toscano, P.; Matese, A.; Di Gennaro, S.F.; Berton, A.; Gatti, M.; Poni, S.; Pádua, L.; Hruška, J.; Morais, R. UAV-Based Hyperspectral Monitoring Using Push-Broom and Snapshot Sensors: A Multisite Assessment for Precision Viticulture Applications. Sensors 2022, 22, 6574. [Google Scholar] [CrossRef] [PubMed]
- Zhong, Y.F.; Wang, X.Y.; Xu, Y.; Jia, T.Y.; Cui, S.; Wei, L.F.; Ma, A.L.; Zhang, L.P. MINI-UAV borne hyperspectral remote sensing: A review. In Proceedings of the IEEE International Geoscience & Remote Sensing Symposium, Fort Worth, TX, USA, 23–28 July 2017; pp. 5908–5911. [Google Scholar]
- LaForest, L.; Hasheminasab, S.M.; Zhou, T.; Flatt, J.E.; Habib, A. New Strategies for Time Delay Estimation during System Calibration for UAV-Based GNSS/INS-Assisted Imaging Systems. Remote Sens. 2019, 11, 1811. [Google Scholar] [CrossRef]
- Cheng, Z.X.; Jalon-Rojas, I.; Wang, X.H.; Liu, Y. Impacts of land reclamation on sediment transport and sedimentary environment in a macro-tidal estuary. Estuar. Coast. Shelf Sci. 2020, 242, 106861. [Google Scholar] [CrossRef]
- Trinh, H.; Kieu, H.T.; Pak, H.Y.; Pang, D.S.C.; Cokro, A.A.; Law, A.W.K. A Framework for Survey Planning Using Portable Unmanned Aerial Vehicles (pUAVs) in Coastal Hydro-Environment. Remote Sens. 2022, 14, 2283. [Google Scholar] [CrossRef]
- Kislik, C.; Dronova, I.; Kelly, M. UAVs in Support of Algal Bloom Research: A Review of Current Applications and Future Opportunities. Drones 2018, 2, 35. [Google Scholar] [CrossRef]
- Polonen, I.; Puupponen, H.H.; Honkavaara, E.; Lindfors, A.; Saari, H.; Markelin, L.; Hakala, T.; Nurminen, K. UAV-based hyperspectral monitoring of small freshwater area. In Proceedings of the Conference on Remote Sensing for Agriculture, Ecosystems, and Hydrology XVI was part of the International Symposium on Remote Sensing, Amsterdam, The Netherlands, 22–25 September 2014. [Google Scholar]
- Yi, L.A.; Chen, J.M.; Zhang, G.F.; Xu, X.; Ming, X.; Guo, W.J. Seamless Mosaicking of UAV-Based Push-Broom Hyperspectral Images for Environment Monitoring. Remote Sens. 2021, 13, 4720. [Google Scholar] [CrossRef]
- Park, Y.J.; Ruddick, K. Model of remote-sensing reflectance including bidirectional effects for case 1 and case 2 waters. Appl. Optics 2005, 44, 1236–1249. [Google Scholar] [CrossRef] [PubMed]
- Kay, S.; Hedley, J.D.; Lavender, S. Sun Glint Correction of High and Low Spatial Resolution Images of Aquatic Scenes: A Review of Methods for Visible and Near-Infrared Wavelengths. Remote Sens. 2009, 1, 697–730. [Google Scholar] [CrossRef]
- Legleiter, C.J.; Roberts, D.A. A forward image model for passive optical remote sensing of river bathymetry. Remote Sens. Environ. 2009, 113, 1025–1045. [Google Scholar] [CrossRef]
- Muslim, A.M.; Chong, W.S.; Safuan, C.D.M.; Khalil, I.; Hossain, M.S. Coral Reef Mapping of UAV: A Comparison of Sun Glint Correction Methods. Remote Sens. 2019, 11, 2422. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, M.H. Evaluation of sun glint models using MODIS measurements. J. Quant. Spectrosc. Radiat. Transfer 2010, 111, 492–506. [Google Scholar] [CrossRef]
- Pak, H.Y.; Law, A.W.K.; Lin, W.S.; Khoo, E. Sun Glint-Aware Restoration (SUGAR): A comprehensive sun glint correction algorithm for sub-meter UAV imageries with uncertainty quantification. ISPRS J. Photogramm. Remote Sens. 2023. submitted for publication. [Google Scholar]
- Lynch, D.K.; Dearborn, D.S.P.; Lock, J.A. Glitter and glints on water. Appl. Optics 2011, 50, F39–F49. [Google Scholar] [CrossRef] [PubMed]
- Nechad, B.; Ruddick, K.G.; Park, Y. Calibration and validation of a generic multisensor algorithm for mapping of total suspended matter in turbid waters. Remote Sens. Environ. 2010, 114, 854–866. [Google Scholar] [CrossRef]
- Dogliotti, A.; Ruddick, K.G.; Nechad, B.; Doxaran, D.; Knaeps, E. A single algorithm to retrieve turbidity from remotely-sensed data in all coastal and estuarine waters. Remote Sens. Environ. 2015, 156, 157–168. [Google Scholar] [CrossRef]
- Tavora, J.; Boss, E.; Doxaran, D.; Hill, P. An Algorithm to Estimate Suspended Particulate Matter Concentrations and Associated Uncertainties from Remote Sensing Reflectance in Coastal Environments. Remote Sens. 2020, 12, 2172. [Google Scholar] [CrossRef]
- Hedley, J.D.; Harborne, A.R.; Mumby, P.J. Simple and robust removal of sun glint for mapping shallow-water benthos. Int. J. Remote Sens. 2005, 26, 2107–2112. [Google Scholar] [CrossRef]
- Goodman, J.A.; Lee, Z.P.; Ustin, S.L. Influence of atmospheric and sea-surface corrections on retrieval of bottom depth and reflectance using a semi-analytical model: A case study in Kaneohe Bay, Hawaii. Appl. Optics 2008, 47, F1–F11. [Google Scholar] [CrossRef]
- Kutser, T.; Vahtmae, E.; Praks, J. A sun glint correction method for hyperspectral imagery containing areas with non-negligible water leaving NIR signal. Remote Sens. Environ. 2009, 113, 2267–2274. [Google Scholar] [CrossRef]
- Duan, P.H.; Lai, J.B.; Kang, J.; Kang, X.D.; Ghamisi, P.; Li, S.T. Texture-aware total variation-based removal of sun glint in hyperspectral images. ISPRS J. Photogramm. Remote Sens. 2020, 166, 359–372. [Google Scholar] [CrossRef]
- Cox, C.; Munk, W. Statistics of the Sea Surface Derived from Sun Glitter. J. Mar. Res. 1954, 13, 198–227. [Google Scholar]
- Horoshenkov, K.V.; Nichols, A.; Tait, S.J.; Maximov, G. The pattern of surface waves in a shallow free surface flow. J. Geophys. Res. Earth Surf. 2013, 118, 1864–1876. [Google Scholar] [CrossRef]
- Overstreet, B.T.; Legleiter, C.J. Removing sun glint from optical remote sensing images of shallow rivers. Earth Surf. Processes Landf. 2017, 42, 318–333. [Google Scholar] [CrossRef]
- Zhang, Y.Z.; Zhang, T.X. Structure-guided unidirectional variation de-striping in the infrared bands of MODIS and hyperspectral images. Infrared Phys. Technol. 2016, 77, 132–143. [Google Scholar] [CrossRef]
- Lu, Q.K.; Si, W.; Wei, L.F.; Li, Z.Q.; Xia, Z.H.; Ye, S.; Xia, Y. Retrieval of Water Quality from UAV-Borne Hyperspectral Imagery: A Comparative Study of Machine Learning Algorithms. Remote Sens. 2021, 13, 3928. [Google Scholar] [CrossRef]
- Jurado, J.M.; Pádua, L.; Hruska, J.; Feito, F.R.; Sousa, J.J.S. An Efficient Method for Generating UAV-Based Hyperspectral Mosaics Using Push-Broom Sensors. IEEE J. Selected Topics Appl. Earth Observ. Remote Sens. 2021, 14, 6515–6531. [Google Scholar] [CrossRef]
- Hobbs, S.; Lambert, A.; Ryan, M.J.; Paull, D.J.; Haythorpe, J. Appraisal of Low-Cost Pushbroom Hyper-Spectral Sensor Systems for Material Classification in Reflectance. Sensors 2021, 21, 4398. [Google Scholar] [CrossRef]
- MicaSense Image Processing Tutorials. Github, 2023. Available online: https://micasense.github.io/imageprocessing/index.html (accessed on 13 February 2024).
- Alvarez-Vanhard, E.; Corpetti, T.; Houet, T. UAV & satellite synergies for optical remote sensing applications: A literature review. Sci. Remote Sens. 2021, 3, 100019. [Google Scholar] [CrossRef]
- Wilkinson, M.D.; Dumontier, M.; Aalbersberg, I.J.; Appleton, G.; Axton, M.; Baak, A.; Blomberg, N.; Boiten, J.W.; Santos, L.B.D.; Bourne, P.E.; et al. The FAIR Guiding Principles for scientific data management and stewardship. Sci. Data 2019, 6, 1–9. [Google Scholar] [CrossRef] [PubMed]














| Attributes | Symbol/Dimensions/Equation |
|---|---|
| Sensor height (m) | H |
| Frame rate (frames per second) | r |
| Pixel size at sensor (p) | 5.3 µm |
| Total number of pixels in x-direction (px) | 20 |
| Total number of pixels in x-direction (py) | 1024 |
| Focal length (mm) (f) | 16 mm |
| Number of lines per band (l) | 8 |
| Actual size of sensor along x direction (mm) (sx) | |
| Actual size of sensor along y direction (mm) (sy) | |
| Field-of-view in the x-direction (°) (fovx) | |
| Field-of-view in the y-direction (°) (fovy) | |
| Total ground coverage in the x-direction (m) (gx) | |
| Total ground coverage in the y-direction (m) (gy) | |
| Ground resolution (m) | |
| Overlap ratio in the x-direction |
| 641 nm | 660 nm | 678 nm | 715 nm | 860 nm | |
|---|---|---|---|---|---|
| (a) Original | RMSE = 9.894, | RMSE = 9.628, | RMSE = 8.594, | RMSE = 8.562, | RMSE = 30.145, |
| MAPE = 0.492, | MAPE = 0.471, | MAPE = 0.368, | MAPE = 0.254, | MAPE = 0.943, | |
| R2 = 0.458 | R2 = 0.487 | R2 = 0.591 | R2 = 0.594 | R2 = −4.534 | |
| (b) Time delay correction | RMSE = 9.898, | RMSE = 9.612, | RMSE = 8.586, | RMSE = 8.568, | RMSE = 30.951, |
| MAPE = 0.491, | MAPE = 0.469, | MAPE = 0.370, | MAPE = 0.251, | MAPE = 0.960, | |
| R2 = 0.458 | R2 = 0.489 | R2 = 0.592 | R2 = 0.594 | R2 = −4.921 | |
| (c) De-striping | RMSE = 8.641, | RMSE = 8.358, | RMSE = 7.279, | RMSE = 6.570, | RMSE = 30.230, |
| MAPE = 0.427, | MAPE = 0.410, | MAPE = 0.340, | MAPE = 0.239, | MAPE = 0.972, | |
| R2 = 0.587 | R2 = 0.614 | R2 = 0.707 | R2 = 0.761 | R2 = −4.330 | |
| (d) Radiometric correction | RMSE = 5.943, | RMSE = 5.629, | RMSE = 5.175, | RMSE = 4.537, | RMSE = 21.338, |
| MAPE = 0.275, | MAPE = 0.251, | MAPE = 0.229, | MAPE = 0.188, | MAPE = 0.701, | |
| R2 = 0.805 | R2 = 0.825 | R2 = 0.852 | R2 = 0.886 | R2 = −1.519 | |
| (e) Sun glint correction | RMSE = 5.856, | RMSE = 5.636, | RMSE = 4.885, | RMSE = 4.579, | RMSE = 21.861, |
| MAPE = 0.274, | MAPE = 0.254, | MAPE = 0.211, | MAPE = 0.192, | MAPE = 0.750, | |
| R2 = 0.810 | R2 = 0.824 | R2 = 0.868 | R2 = 0.884 | R2 = −1.644 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pak, H.Y.; Kieu, H.T.; Lin, W.; Khoo, E.; Law, A.W.-K. CoastalWQL: An Open-Source Tool for Drone-Based Mapping of Coastal Turbidity Using Push Broom Hyperspectral Imagery. Remote Sens. 2024, 16, 708. https://doi.org/10.3390/rs16040708
Pak HY, Kieu HT, Lin W, Khoo E, Law AW-K. CoastalWQL: An Open-Source Tool for Drone-Based Mapping of Coastal Turbidity Using Push Broom Hyperspectral Imagery. Remote Sensing. 2024; 16(4):708. https://doi.org/10.3390/rs16040708
Chicago/Turabian StylePak, Hui Ying, Hieu Trung Kieu, Weisi Lin, Eugene Khoo, and Adrian Wing-Keung Law. 2024. "CoastalWQL: An Open-Source Tool for Drone-Based Mapping of Coastal Turbidity Using Push Broom Hyperspectral Imagery" Remote Sensing 16, no. 4: 708. https://doi.org/10.3390/rs16040708
APA StylePak, H. Y., Kieu, H. T., Lin, W., Khoo, E., & Law, A. W.-K. (2024). CoastalWQL: An Open-Source Tool for Drone-Based Mapping of Coastal Turbidity Using Push Broom Hyperspectral Imagery. Remote Sensing, 16(4), 708. https://doi.org/10.3390/rs16040708