
Research on Methods to Improve Length of Day Precision by Combining with Effective Angular Momentum

Abstract
:1. Introduction
2. Data Set
2.1. LOD Dataset
2.2. EAM Dataset
3. Methods
3.1. LOD Tidal Correction
3.2. EAM Data Analysis
3.3. GNSS LODR Outlier Removal
3.4. Least Squares Fitting
3.5. Kalman Filtering and Combination
4. Simulation Experiment of EAM Formal Error
4.1. WHU and EAM Simulation Combination Experiment
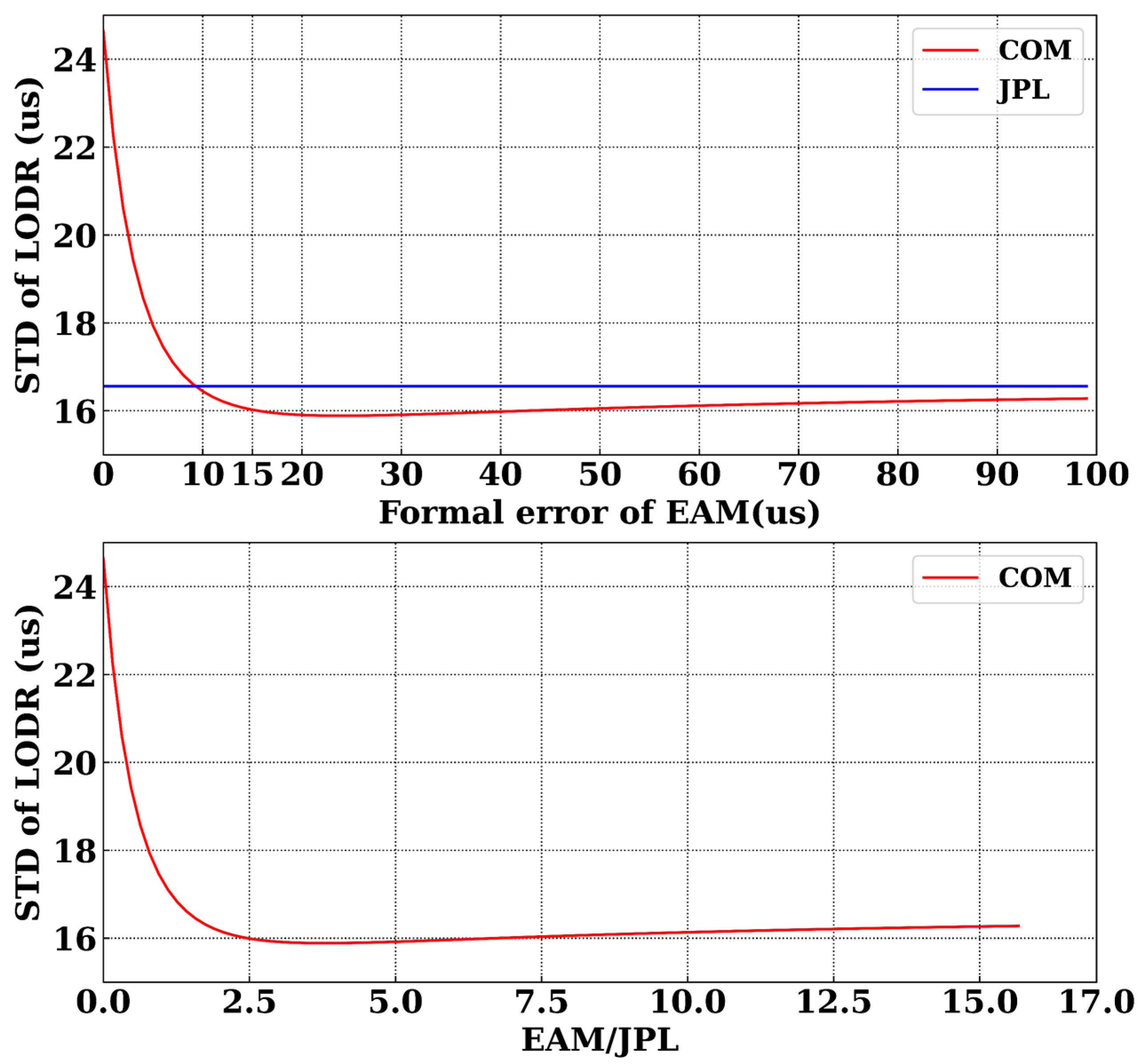
4.2. JPL and EAM Simulation Combination Experiment
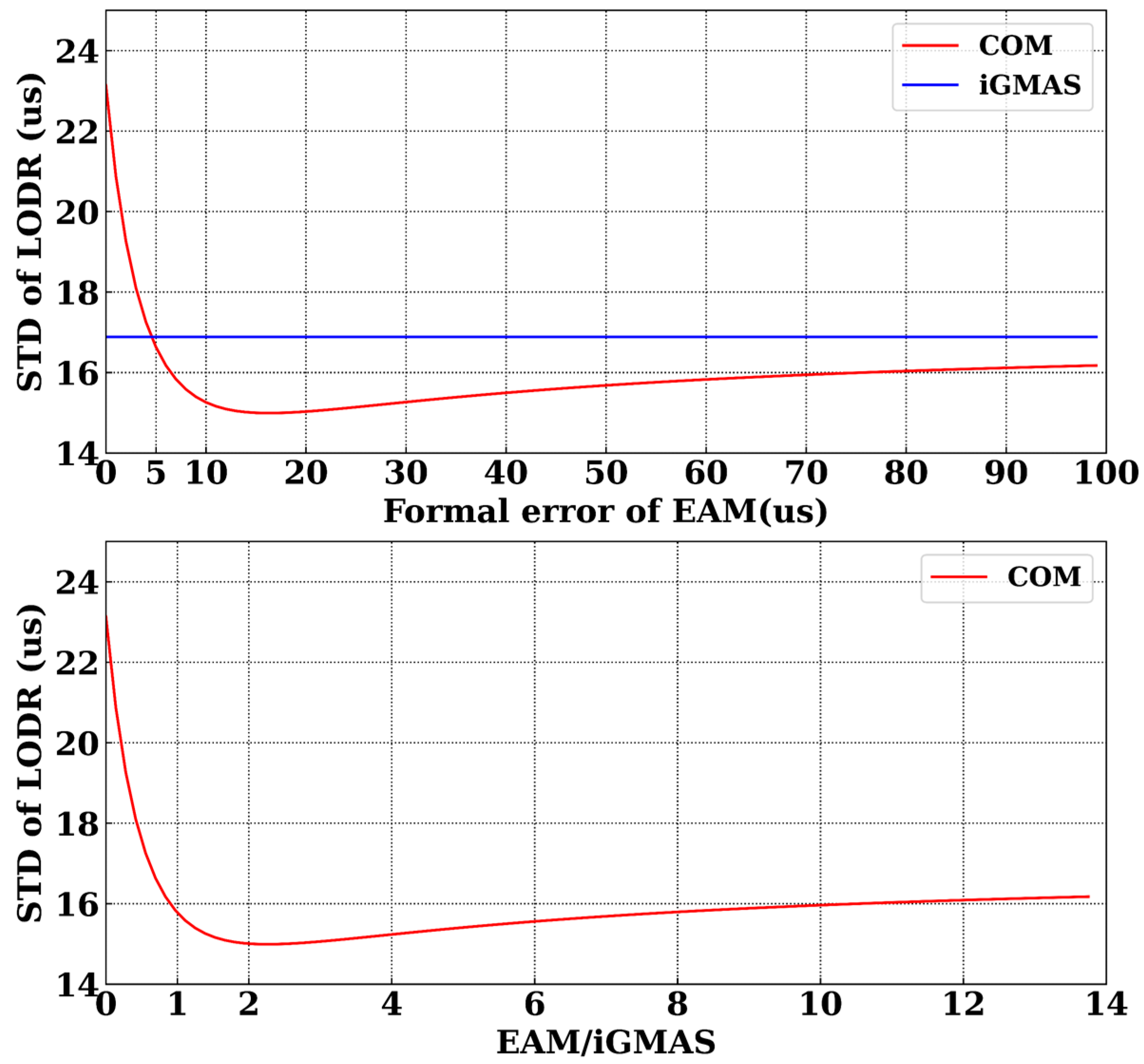
4.3. iGMAS and EAM Simulation Combination Experiment
5. Combination of Measured Datasets
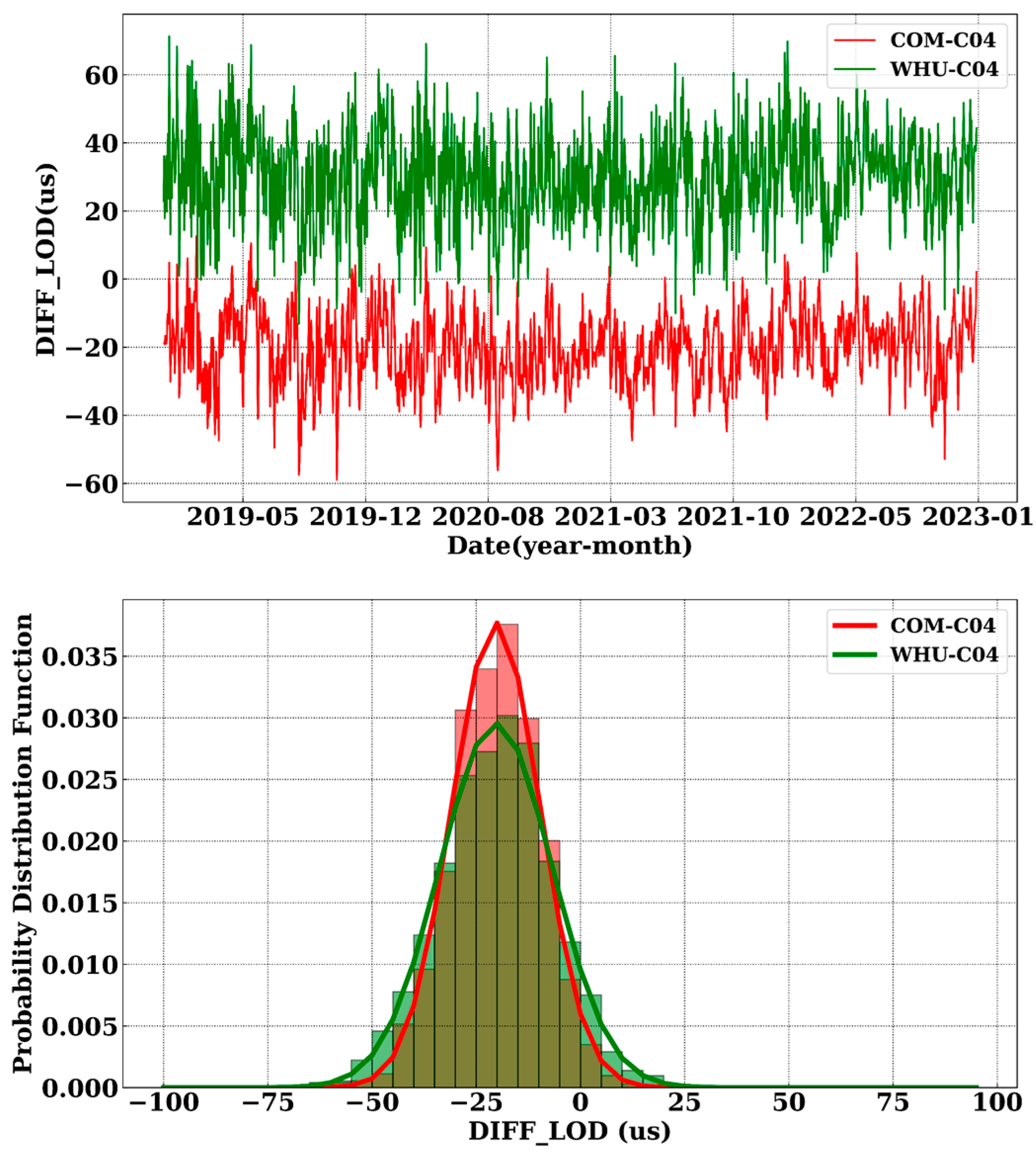
5.1. Combination of WHU with EAM
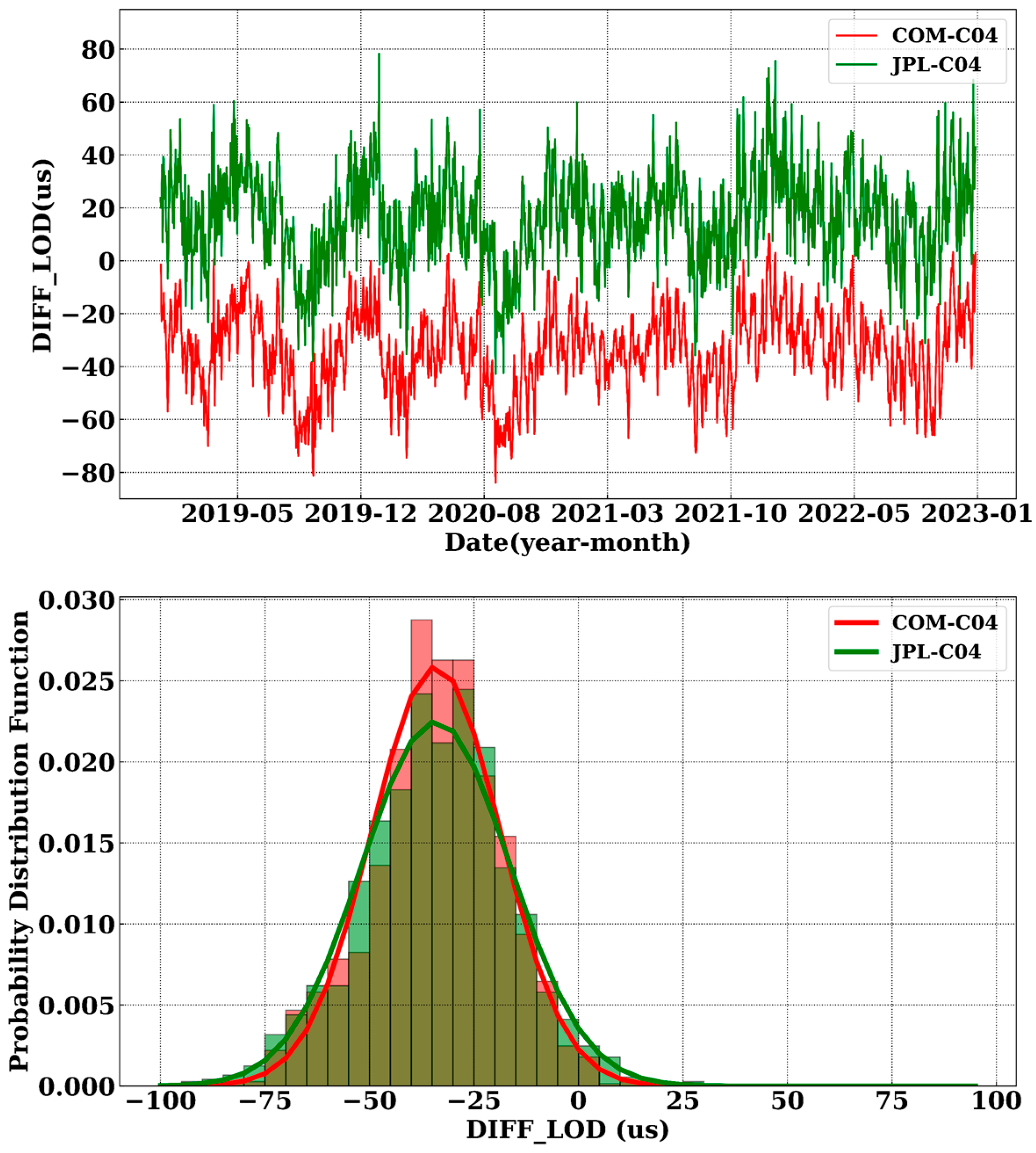
5.2. Combination of JPL with EAM
6. Discussion
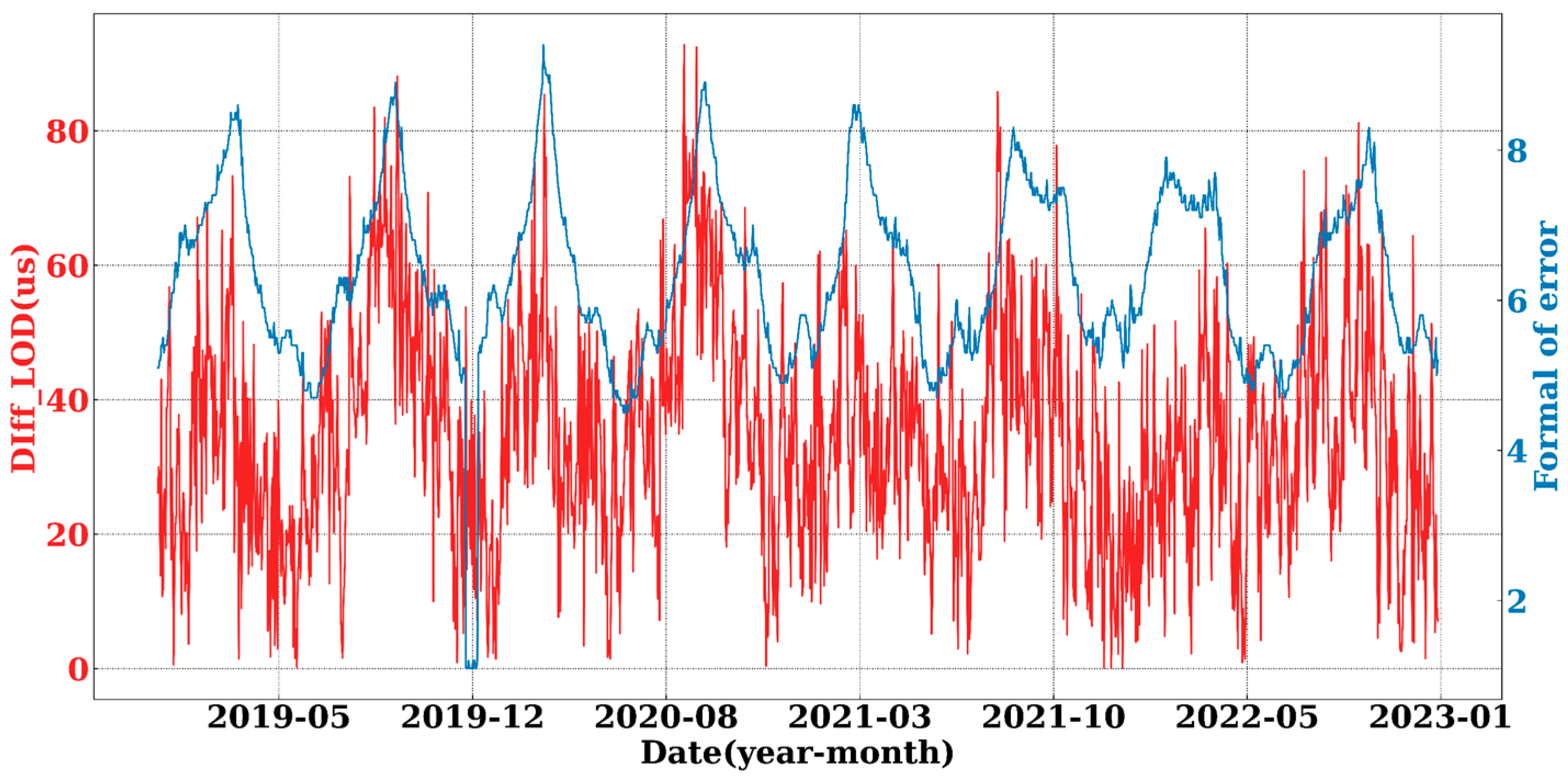
6.1. Correlation Analysis between Formal Error and Deviation
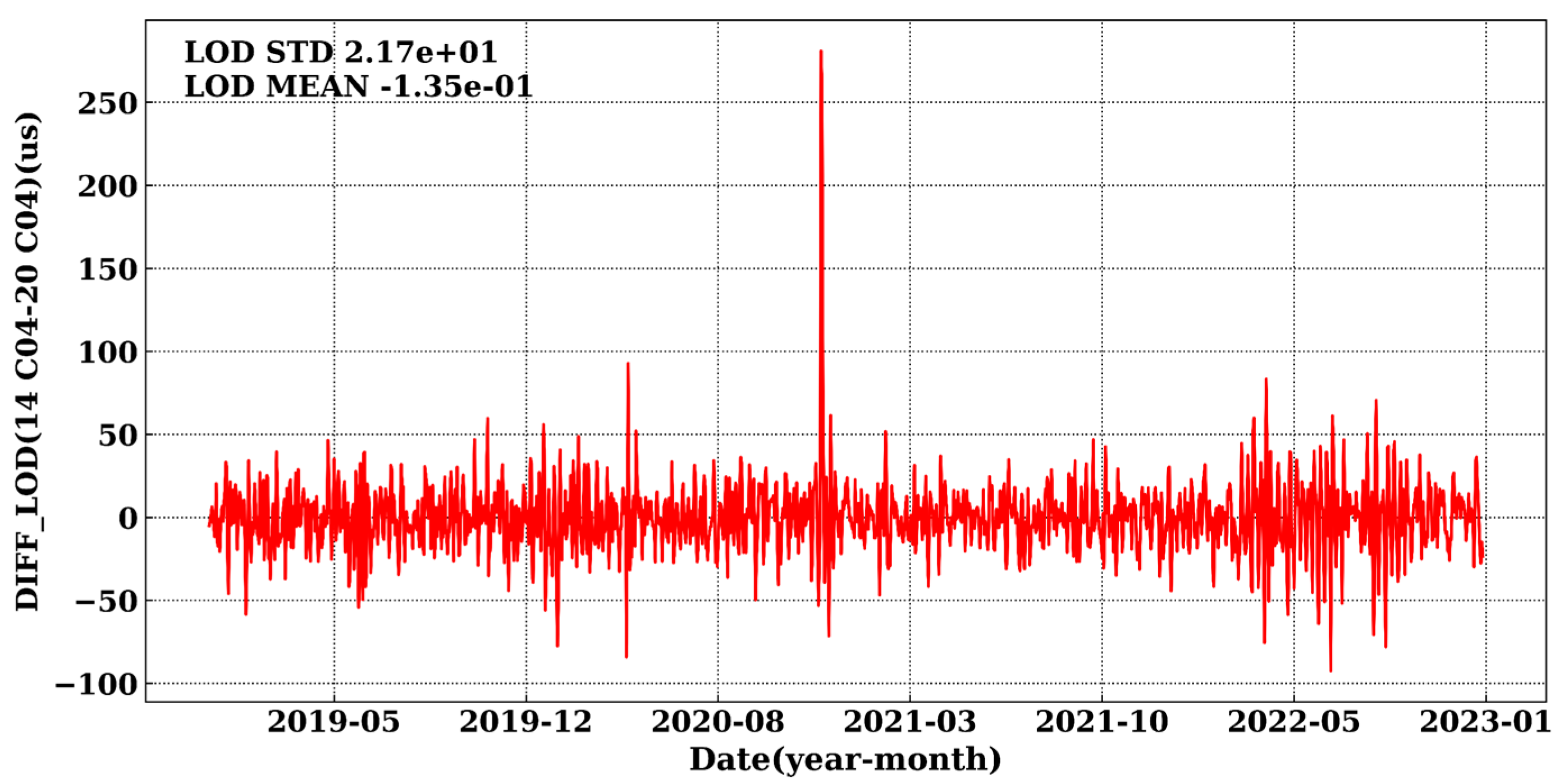
6.2. Comparison between IERS 20 C04 and IERS 14 C04
6.3. Prospects
- (a)
- Carry out EAM, LOD, and UT1 combination algorithms to improve the accuracy of LOD while further correcting the system bias of LOD, and attempt to obtain higher accuracy UT1 and EAM sequences.
- (b)
- Further analyze and validate the formal error of EAM. This involves conducting in-depth investigations into the sources and magnitudes of error in the EAM dataset, with the aim of improving its reliability and accuracy.
- (c)
- Apply the LOD obtained from the combination of EAM and LOD to EOP prediction. This can compensate for the one-day delay in EOP rapid LOD products, thus enhancing the accuracy of EOP prediction.
- (d)
- Conduct experiments combining polar motion (PM) and EAM to explore the impact of EAM on PM. This research aims to understand how the EAM dataset can be utilized to improve the prediction and modeling of PM.
7. Conclusions
- (a)
- After applying the EAM dataset with reasonable formal error, the LOD accuracy can be improved by 10–20%. However, this does not correct its systematic error.
- (b)
- Through simulation experiments, we have determined that when the formal error of the EAM dataset is 2–5 times that of the GNSS LOD dataset, specifically within the range of 10–30 us, the combined accuracy of LOD is significantly improved.
- (c)
- We have analyzed the correlation between the formal error of GNSS LOD and the accuracy of external conformity. Through both simulation and actual measurement data, it has been demonstrated that using formal accuracy weighting in the combination process is a valid approach.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Petti, G.; Luzum, B. IERS Conventions 2010; Verlag des Bundesamts für Kartographie und Geodäsie: Frankfurt am Main, Germany, 2010; ISBN 3-89888-989-6. [Google Scholar]
- Kalarus, M.; Schuh, H.; Kosek, W.; Akyilmaz, O.; Bizouard, C.; Gambis, D.; Gross, R.; Jovanovi’c, B.; Kumakshev, S.; Kutterer, H.; et al. Achievements of the Earth orientation parameters prediction comparison campaign. J. Geod. 2010, 84, 587–596. [Google Scholar] [CrossRef]
- Zheng, D.W.; Yu, N.H. The Earth’s Rotation and Its Relationship with Geophysical Phenomena. Prog. Geophys. 1996, 2, 81–104. [Google Scholar]
- Nastula, J.; Chin, T.M.; Gross, R.; Śliwińska, J.; Wińska, M. Smoothing and predicting celestial pole offsets using a Kalman filter and smoother. J. Geod. 2020, 94, 2–17. [Google Scholar] [CrossRef]
- Gambis, D.; Luzum, B. Earth rotation monitoring, UT1-UTC determination and prediction. Metrologia 2011, 48, 165–170. [Google Scholar] [CrossRef]
- Gambis, D.; Biancale, R.; Carlucci, T.; Lemoine, J.M.; Marty, J.C.; Bourda, G.; Charlot, P.; Loyer, S.; Lalanne, T.; Soudarin, L.; et al. Combination of Earth Orientation Parameters and Terrestrial Frame at the Observation Level. In International Association of Geodesy Symposia; Springer: Berlin/Heidelberg, Germany, 2009; Volume 134, pp. 3–9. [Google Scholar] [CrossRef]
- Byram, S.; Hackman, C. High-precision GNSS orbit, clock and EOP estimation at the United States Naval Observatory. In Proceedings of the 2012 IEEE/ION Position, Location and Navigation Symposium, Myrtle Beach, SC, USA, 23–26 April 2012. [Google Scholar] [CrossRef]
- Hein, G.W. Status, perspectives and trends of satellite navigation. Satell. Navig. 2020, 1, 22. [Google Scholar] [CrossRef] [PubMed]
- Nilsson, T.; Böhm, J.; Schuh, H. Universal time from VLBI single-baseline observations during CONT08. J. Geod. 2011, 85, 415–423. [Google Scholar] [CrossRef]
- Nilsson, T.; Heinkelmann, R.; Karbon, M.; Raposo-Pulido, V.; Soja, B.; Schuh, H. Earth orientation parameters estimated from VLBI during the CONT11 campaign. J. Geod. 2014, 88, 491–502. [Google Scholar] [CrossRef]
- Coulot, D.; Pollet, A.; Collilieux, X.; Berio, P. Global optimization of core station networks for space geodesy: Application to the referencing of the SLR EOP with respect to ITRF. J. Geod. 2010, 84, 31. [Google Scholar] [CrossRef]
- Pavlov, D. Role of lunar laser ranging in realization of terrestrial, lunar, and ephemeris reference frames. J. Geod. 2020, 94, 5. [Google Scholar] [CrossRef]
- Willis, P.; Fagard, H.; Ferrage, P.; Lemoine, F.G.; Noll, C.E.; Noomen, R.; Otten, M.; Ries, J.C.; Rothacher, M.; Soudarin, L.; et al. The international DORIS service (IDS): Toward maturity. Adv. Space Res. 2010, 45, 1408–1420. [Google Scholar] [CrossRef]
- Moreaux, G.; Lemoine, F.G.; Capdeville, H.; Kuzin, S.; Otten, M.; Štěpánek, P.; Willis, P.; Ferrage, P. The international DORIS service contribution to the 2014 realization of the international terrestrial reference frame. Adv. Space Res. 2016, 58, 2479–2504. [Google Scholar] [CrossRef]
- Bizouard, C.; Lambert, S.; Gattano, C.; Becker, O.; Richard, J.-Y. The IERS EOP 14C04 solution for Earth orientation parameters consistent with ITRF 2014. J. Geod. 2019, 93, 621–633. [Google Scholar] [CrossRef]
- Artz, T.; Bernhard, L.; Nothnagel, A.; Steigenberger, P.; Tesmer, S. Methodology for the combination of sub-daliy earth rotation from GPS and VLBI observations. J. Geod. 2012, 86, 221–239. [Google Scholar] [CrossRef]
- Barnes, R.T.H.; Hide, A.; White, A.; Wilson, C.A. Atmospheric angular momentum fluctuations. Length-of-day changes and polar motion. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1983, 387, 31–73. [Google Scholar] [CrossRef]
- Rosen, R.D.; Salstein, D.A. Variations in atmospheric angular momentum on global and regional scales and the length of day. J. Geophys. Res-Oceans 1983, 88, 5451–5470. [Google Scholar] [CrossRef]
- Gross, R.S.; Fukumori, I.; Menemenlis, D.; Gegout, P. Atmospheric and oceanic excitation of length-of-day variations during 1980–2000. J. Geophys. Res. Solid Earth 2004, 109, 1–15. [Google Scholar] [CrossRef]
- Rekier, J.; Chao, B.F.; Chen, J.L.; Dehant, V.; Rosat, S.; Zhu, P. Earth’s Rotation: Observations and Relation to Deep Interior. Surv. Geophys. 2022, 43, 149–175. [Google Scholar] [CrossRef]
- Dickey, J.O.; Marcus, S.L.; Steppe, J.A.; Hide, R. The Earth’s angular momentum budget on sub-seasonal time scales. Science 1992, 255, 321–324. [Google Scholar] [CrossRef] [PubMed]
- Freedman, A.P.; Steppe, J.A.; Dickey, J.O.; Eubanks, T.M.; Sung, L.Y. The short-term prediction of universal time and length of day using atmospheric angular momentum. J. Geophys. Res. 1994, 99, 6981–6996. [Google Scholar] [CrossRef]
- Johnson, T.J.; Luzum, B.J.; Ray, J.R. Improved near-term Earth rotation predictions using atmospheric angular momentum analysis and forecasts. J. Geodyn. 2005, 39, 209–221. [Google Scholar] [CrossRef]
- Dill, R.; Dobslaw, H. Short-term polar motion forecasts from earth system modeling data. J. Geod. 2010, 284, 529–536. [Google Scholar] [CrossRef]
- Dill, R.; Dobslaw, H.; Thomas, M. Improved 90-day Earth orientation predictions from angular momentum forecasts of atmosphere, ocean, and terrestrial hydrosphere. J. Geod. 2019, 93, 287–295. [Google Scholar] [CrossRef]
- Li, X.; Wu, Y.; Yao, D.; Liu, J.; Nan, K.; Ma, L.; Cheng, X.; Yang, X.; Zhang, S. Research on UT1-UTC and LOD Prediction Algorithm Based on Denoised EAM Dataset. Remote Sens. 2023, 15, 4654. [Google Scholar] [CrossRef]
- Jungclaus, J.H.; Fischer, N.; Haak, H.; Lohmann, K.; Marotzke, J.; Matei, D.; Mikolajewicz, U.; Notz, D.; VonStorch, J.S. Characteristics of the ocean simulations in the Max Planck Institute Ocean Model (MPIOM) the ocean component of the MPI-Earth system model. J. Adv. Model. EarthSyst. 2013, 5, 422–446. [Google Scholar] [CrossRef]
- Dill, R. Hydrological Model LSDM for Operational Earth Rotation and Gravity Field Variations; Scientific Technical Report STR; 08/09; GFZ: Potsdam, Germany, 2008; p. 35. [Google Scholar]
- Dobslaw, H.; Dill, R.; Grötzsch, A.; Brzezinski, A.; Thomas, M. Seasonal polar motion excitation from numerical models of atmosphere, ocean, and continental hydrosphere. J. Geophys. Res. 2010, 115, 406. [Google Scholar] [CrossRef]
- Tamisiea, M.E.; Hill, E.M.; Ponte, R.M.; Davis, J.L.; Velicogna, I.; Vinogradova, N.T. Impact of self-attraction and loading on the annual cycle in sea level. J. Geophys. Res. 2010, 115, 1–15. [Google Scholar] [CrossRef]
- Hagemann, S.; Dumenil, L. A parametrization of the waterflow for the global scale. Clim. Dynam. 1998, 14, 17–31. [Google Scholar] [CrossRef]
- Ding, H.; Chao, F. Application of Stabilized AR-z Spectrum in Harmonic Analysis for Geophysics. J. Geophys. Res. Solid Earth 2018, 123, 8249–8259. [Google Scholar] [CrossRef]
- Chao, B.F.; Chung, W.Y.; Shih, Z.; Hsieh, Y. Earth’s rotation variations: A wavelet analysis. Terra Nova 2014, 26, 260–264. [Google Scholar] [CrossRef]
- Ray, R.D.; Erofeeva, S.Y. Long-period tidal variations in the length of day. J. Geophys. Res. 2014, 119, 1498–1509. [Google Scholar] [CrossRef]
- Hung, L.S.; Anderson, B.D.O. Design of Kalman filters using signal-model output statistics. Proc. Inst. Electr. Eng. UK 1973, 120, 312–318. [Google Scholar]
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter; ACM, Inc.: Chicago, IL, USA, 2001; pp. 1–24. [Google Scholar]
- Nahi, N.E. Estimation Theory and Applications; John Wiley and Sons: New York, NY, USA, 1969. [Google Scholar]
- Bierman, G.J. Factorization Methods for Discrete Sequential Estimation; Academic Press: New York, NY, USA, 1977. [Google Scholar]
- Rosen, R.D.; Salstein, D.A.; Miller, A.J.; Arpe, K. Accuracy of atmospheric angular momentum estimates from operational analyses. Mon. Weather Rev. 1987, 115, 1627–1639. [Google Scholar] [CrossRef]
- Gross, R.S.; Eubanks, T.M. Estimating the “noise” component of various atmospheric angular momentum time series (abstract). Eos Trans. AGU 1988, 69, 1153. [Google Scholar]
- Bell, M.J.; Hide, R.; Sakellarides, G. Atmospheric angular momentum forecasts as novel tests of global numerical weather prediction models. Philos. Trans. R. Soc. Lond. Set. A 1991, 334, 55–92. [Google Scholar]
- Gross, R.S.; Steppe, J.A.; Dickey, J.O. The running RMS difference between length-of-day and various measures of atmospheric angular momentum. In Proceedings of the AGU Chapman Conference on Geodetic VLBI: Monitoring Global Change, Washington, DC, USA, 22–26 April 1991; NOAA Tech. Rgp. NOS 137 NGS 49. Natl. Ocean Serv., NOAA: Silver Spring, MD, USA, 1991; pp. 238–258. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Angular | Time Resolution | Update Frequency | Proportion |
|---|---|---|---|
| AAM | 3 h | 24 h | 97.6% |
| OAM | 3 h | 24 h | 0.8% |
| HAM | 24 h | 24 h | 0.5% |
| SLAM | 24 h | 24 h | 1.1% |
| Products | STD (us) | MEAN (us) | MEDIAN (us) | MAX (us) | MIN (us) |
|---|---|---|---|---|---|
| WHU | 13.51 | −20.28 | −19.86 | 21.29 | −63.12 |
| COM | 10.57 | −20.27 | −19.89 | 12.56 | −58.97 |
| Products | STD (us) | MEAN (us) | MEDIAN (us) | MAX (us) | MIN (us) |
|---|---|---|---|---|---|
| JPL | 17.75 | −34.09 | −33.94 | 28.32 | −92.75 |
| COM | 15.42 | −34.06 | −33.68 | 10.27 | −83.98 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Yang, X.; Ye, R.; Cheng, X.; Zhang, S. Research on Methods to Improve Length of Day Precision by Combining with Effective Angular Momentum. Remote Sens. 2024, 16, 722. https://doi.org/10.3390/rs16040722
Li X, Yang X, Ye R, Cheng X, Zhang S. Research on Methods to Improve Length of Day Precision by Combining with Effective Angular Momentum. Remote Sensing. 2024; 16(4):722. https://doi.org/10.3390/rs16040722
Chicago/Turabian StyleLi, Xishun, Xuhai Yang, Renyin Ye, Xuan Cheng, and Shougang Zhang. 2024. "Research on Methods to Improve Length of Day Precision by Combining with Effective Angular Momentum" Remote Sensing 16, no. 4: 722. https://doi.org/10.3390/rs16040722