
Landsat 9 Thermal Infrared Sensor-2 (TIRS-2) Pre- and Post-Launch Spatial Response Performance

 , , , and
, , , and
Abstract
1. Introduction
2. Methodologies
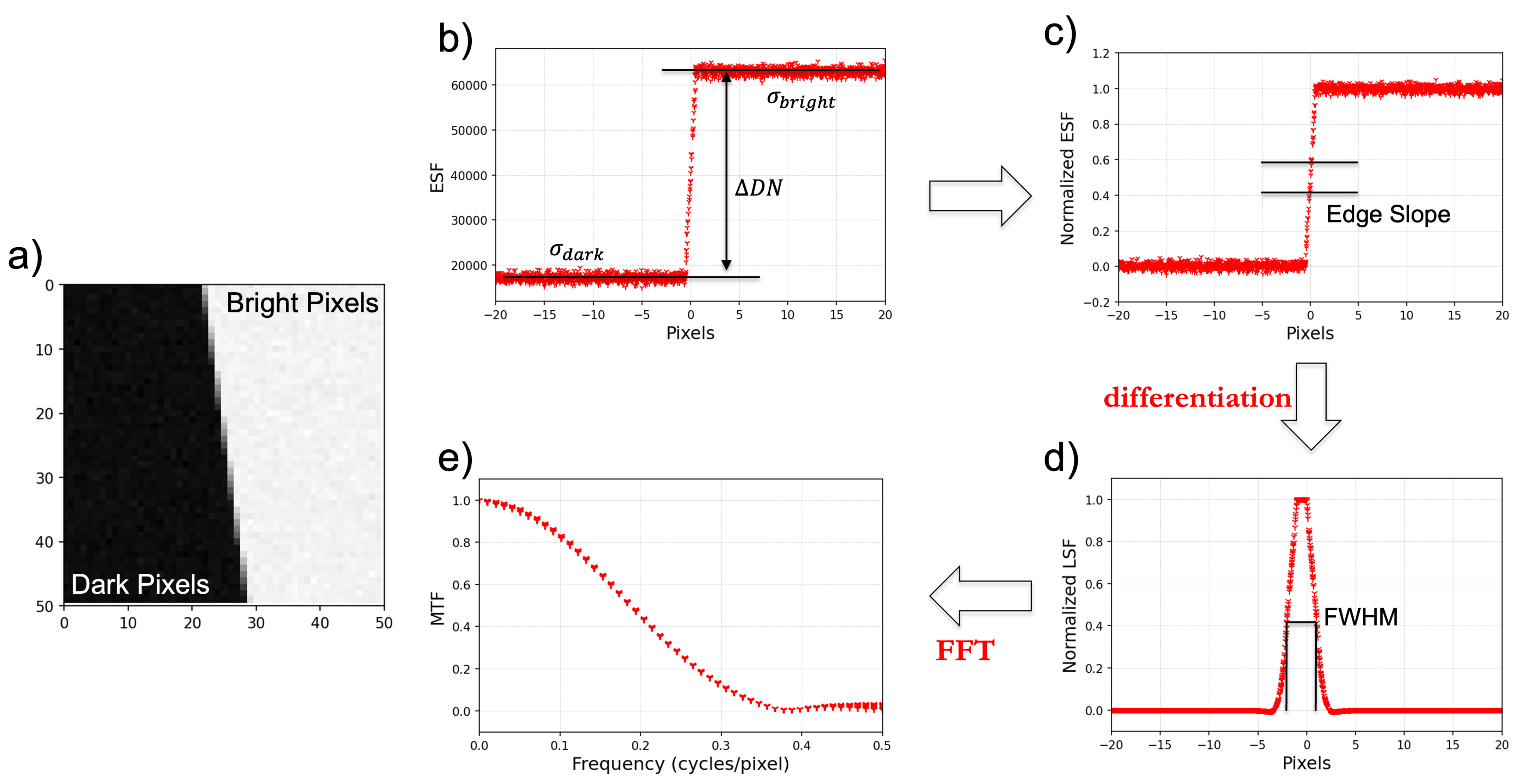
2.1. Theoretical Development
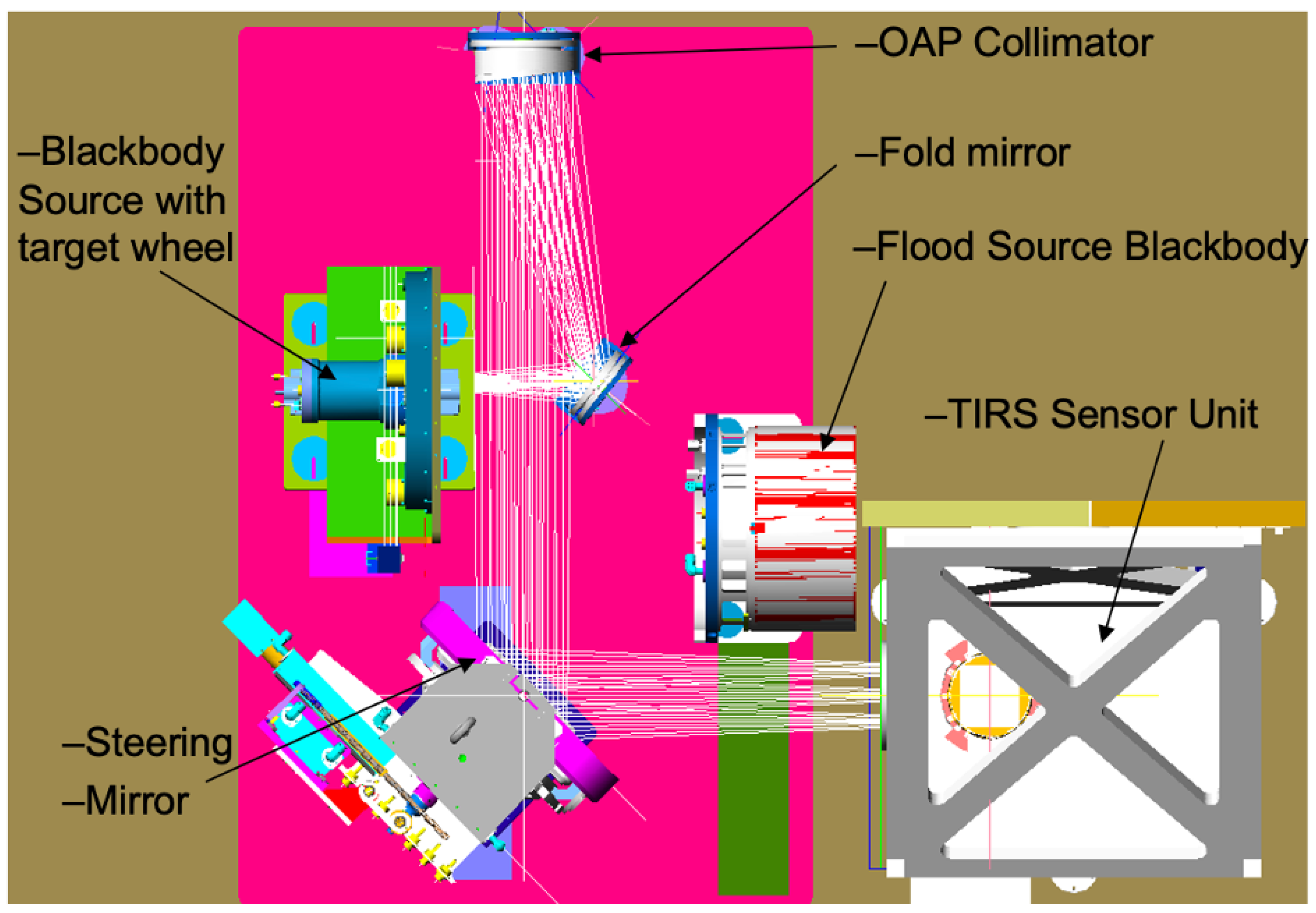
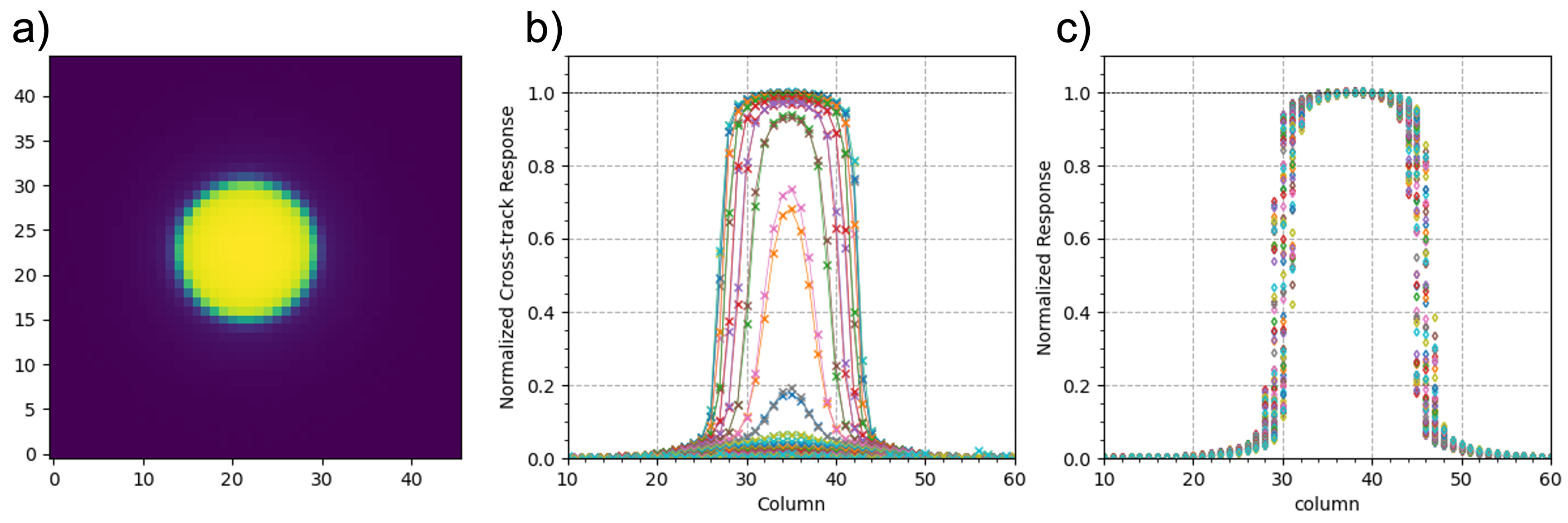
2.2. Pre-Launch Analysis
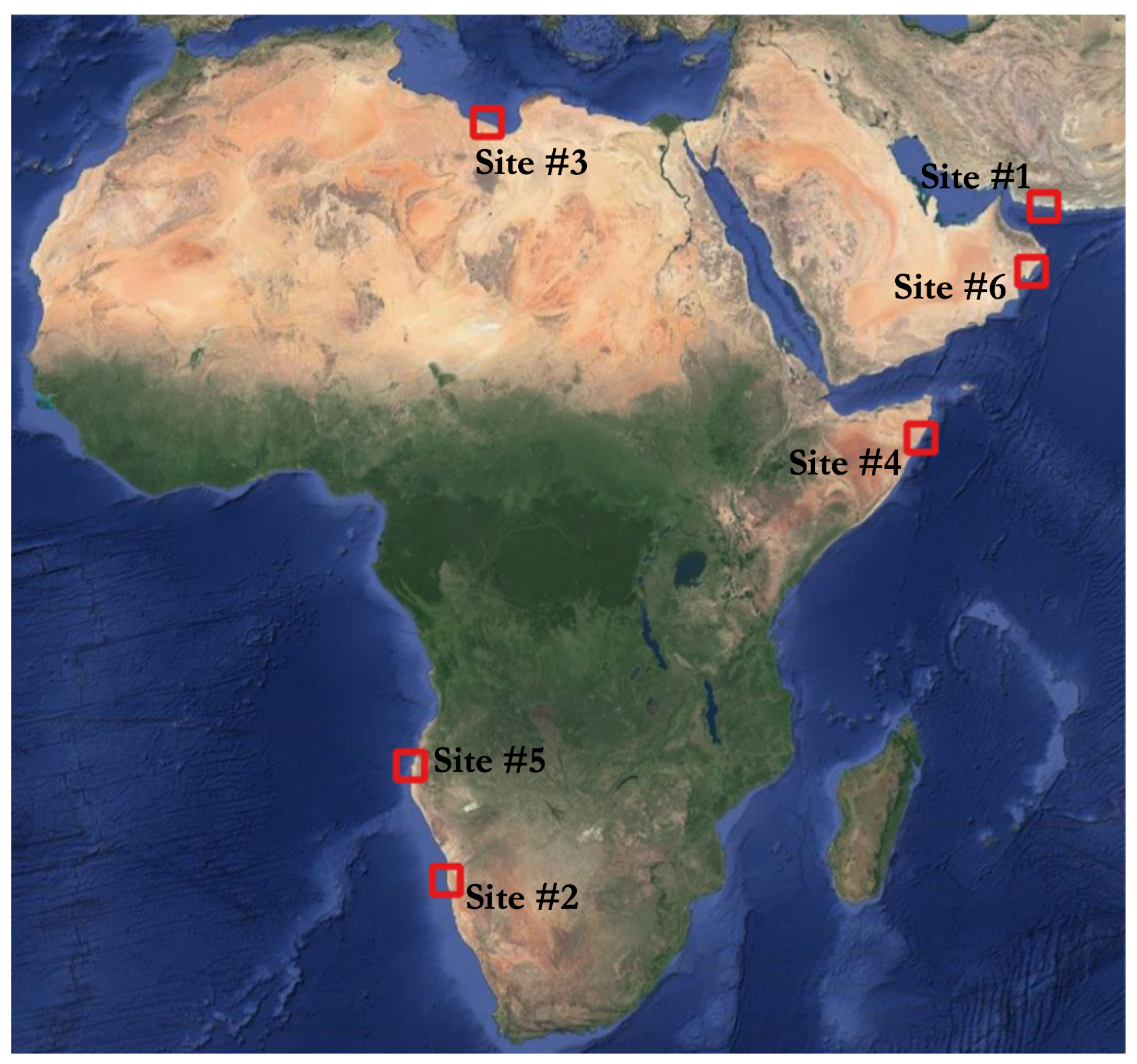
2.3. Post-Launch Analysis
3. Results and Discussion
3.1. Pre-Launch Analysis
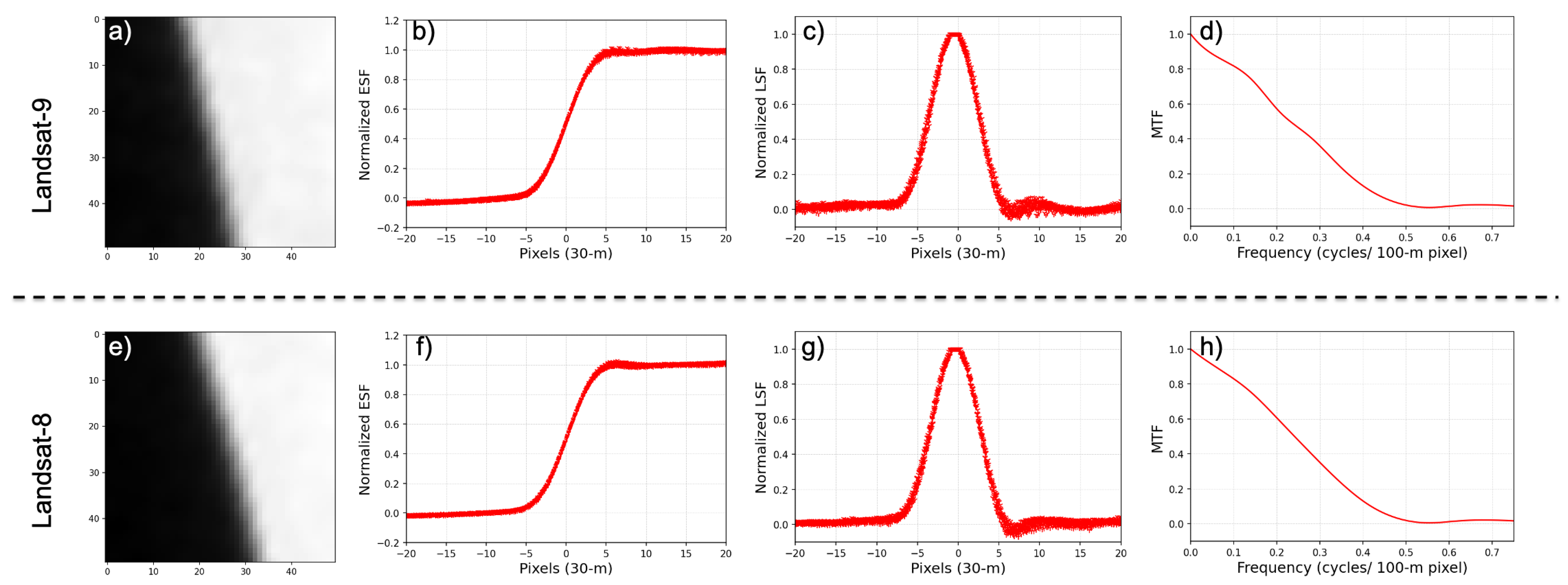
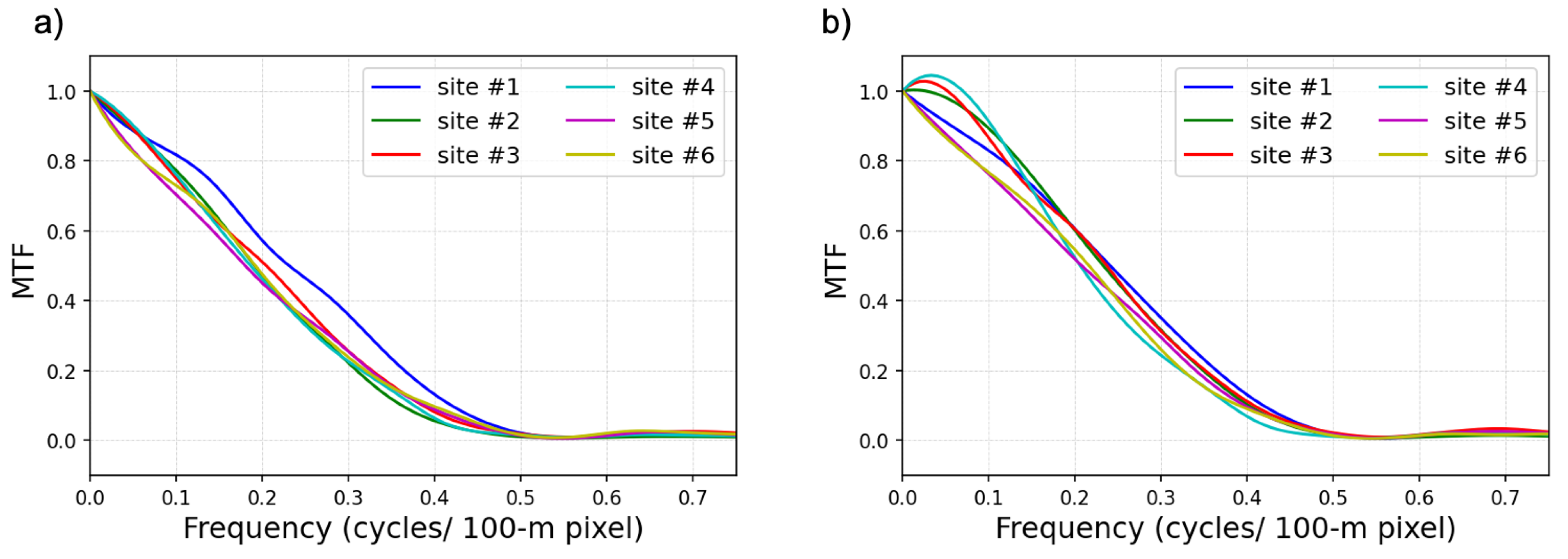
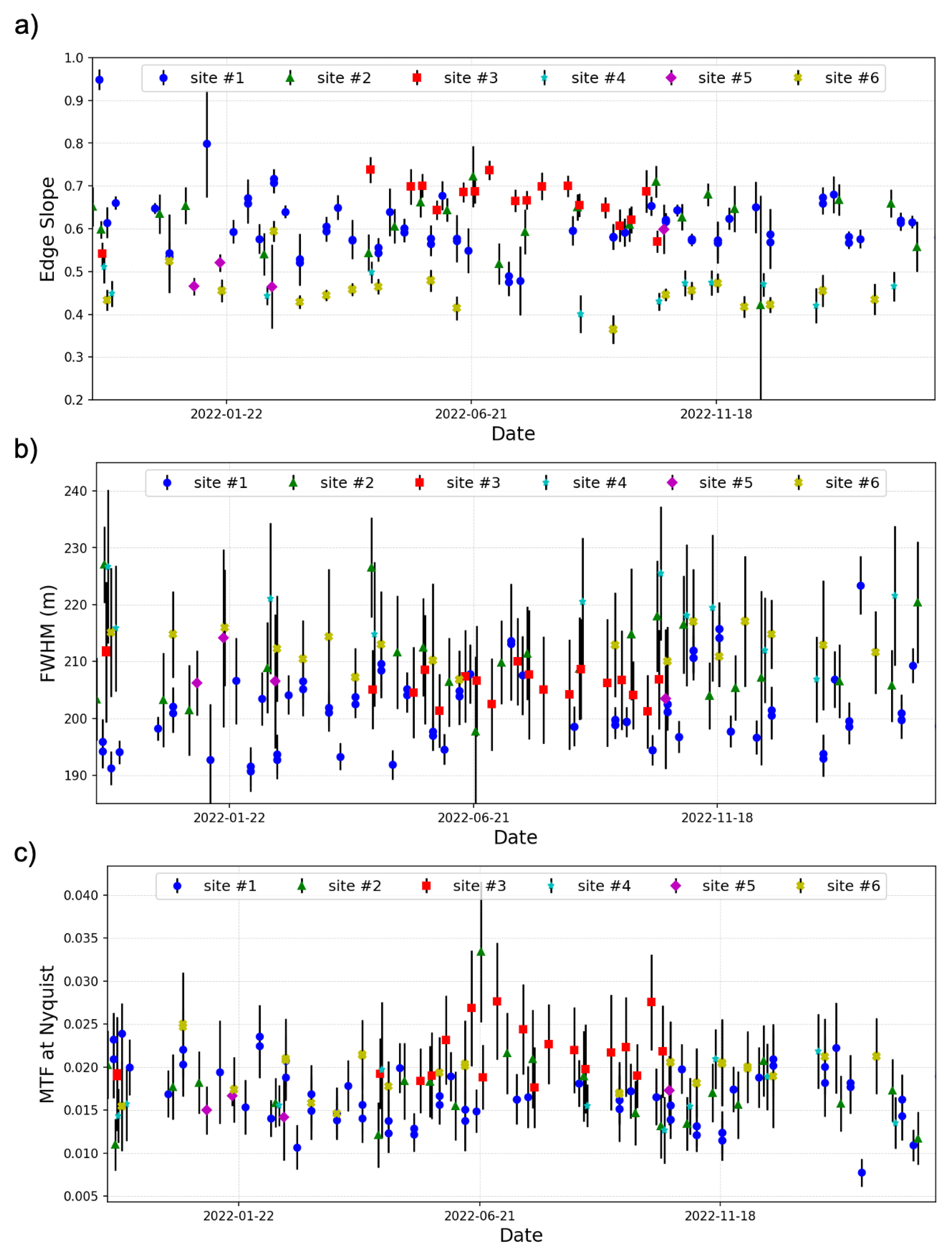
3.2. Post-Launch Analysis
4. Conclusions and Summary
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Masek, J.G.; Wulder, M.A.; Markham, B.; McCorkel, J.; Crawford, C.J.; Storey, J.; Jenstrom, D.T. Landsat 9: Empowering open science and applications through continuity. Remote Sens. Environ. 2020, 248, 111968. [Google Scholar] [CrossRef]
- Choate, M.J.; Rengarajan, R.; Hasan, M.N.; Denevan, A.; Ruslander, K. Operational Aspects of Landsat 8 and 9 Geometry. Remote Sens. 2023, 16, 133. [Google Scholar] [CrossRef]
- Eon, R.; Gerace, A.; Falcon, L.; Poole, E.; Kleynhans, T.; Raqueño, N.; Bauch, T. Validation of Landsat-9 and Landsat-8 Surface Temperature and Reflectance during the Underfly Event. Remote Sens. 2023, 15, 3370. [Google Scholar] [CrossRef]
- Pagnutti, M.; Blonski, S.; Cramer, M.; Helder, D.; Holekamp, K.; Honkavaara, E.; Ryan, R. Targets, methods, and sites for assessing the in-flight spatial resolution of electro-optical data products. Can. J. Remote Sens. 2010, 36, 583–601. [Google Scholar] [CrossRef]
- Wenny, B.N.; Helder, D.; Hong, J.; Leigh, L.; Thome, K.J.; Reuter, D. Pre-and post-launch spatial quality of the Landsat 8 Thermal Infrared Sensor. Remote Sens. 2015, 7, 1962–1980. [Google Scholar] [CrossRef]
- Storey, J.C. Landsat 7 on-orbit modulation transfer function estimation. In Sensors, Systems, and Next-Generation Satellites V; SPIE: Bellingham, WA, USA, 2001; Volume 4540, pp. 50–61. [Google Scholar]
- Hair, J.; Reuter, D.; Tonn, S.; McCorkel, J.; Simon, A.; Djam, M.; Alexander, D.; Ballou, K.; Barclay, R.; Coulter, P.; et al. Landsat 9 Thermal Infrared Sensor 2 Architecture and Design. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Valencia, Spain, 22–27 July 2018; pp. 8841–8844. [Google Scholar] [CrossRef]
- Montanaro, M.; McCorkel, J.; Tveekrem, J.; Stauder, J.; Mentzell, E.; Lunsford, A.; Hair, J.; Reuter, D. Landsat Thermal Infrared Sensor 2 Stray Light Mitigation and Assessment. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–8. [Google Scholar] [CrossRef]
- Gerace, A.; Kleynhans, T.; Eon, R.; Montanaro, M. Towards an operational, split window-derived surface temperature product for the thermal infrared sensors onboard Landsat 8 and 9. Remote Sens. 2020, 12, 224. [Google Scholar] [CrossRef]
- Cawse-Nicholson, K.; Townsend, P.A.; Schimel, D.; Assiri, A.M.; Blake, P.L.; Buongiorno, M.F.; Campbell, P.; Carmon, N.; Casey, K.A.; Correa-Pabón, R.E.; et al. NASA’s surface biology and geology designated observable: A perspective on surface imaging algorithms. Remote Sens. Environ. 2021, 257, 112349. [Google Scholar] [CrossRef]
- Melton, F.S.; Huntington, J.; Grimm, R.; Herring, J.; Hall, M.; Rollison, D.; Erickson, T.; Allen, R.; Anderson, M.; Fisher, J.B.; et al. OpenET: Filling a critical data gap in water management for the western United States. JAWRA J. Am. Water Resour. Assoc. 2022, 58, 971–994. [Google Scholar] [CrossRef]
- Viallefont-Robinet, F.; Helder, D.; Fraisse, R.; Newbury, A.; van den Bergh, F.; Lee, D.; Saunier, S. Comparison of MTF measurements using edge method: Towards reference data set. Opt. Express 2018, 26, 33625–33648. [Google Scholar] [CrossRef] [PubMed]
- Choi, T.; Helder, D.L. Generic sensor modeling for modulation transfer function (MTF) estimation. In Proceedings of the Pecora, Sioux Falls, SD, USA, 23–27 October 2005; Volume 16, pp. 23–27. [Google Scholar]
- Forshaw, M.; Haskell, A.; Miller, P.; Stanley, D.; Townshend, J. Spatial resolution of remotely sensed imagery A review paper. Int. J. Remote Sens. 1983, 4, 497–520. [Google Scholar] [CrossRef]
- ISO 12233: 2000; Photography–Electronic Still Picture Cameras–Resolution Measurements. International Organization for Standardization: Geneva, Switzerland, 2000.
- Burns, P.D. Slanted-edge MTF for digital camera and scanner analysis. In Proceedings of the IS and Ts PICS Conference, Portland, OR, USA, 26–29 March 2000; pp. 135–138. [Google Scholar]
- Kohm, K. Modulation transfer function measurement method and results for the Orbview-3 high resolution imaging satellite. In Proceedings of the ISPRS, Istanbul, Turkey, 12–23 July 2004; Volume 35, pp. 12–23. [Google Scholar]
- Helder, D.; Choi, T.; Rangaswamy, M. In-flight characterization of spatial quality using point spread functions. In Post-Launch Calibration of Satellite Sensors; CRC Press: Boca Raton, FL, USA, 2004; pp. 159–198. [Google Scholar]
- McCorkel, J.; Montanaro, M.; Efremova, B.; Pearlman, A.; Wenny, B.; Lunsford, A.; Simon, A.; Hair, J.; Reuter, D. Landsat 9 thermal infrared sensor 2 characterization plan overview. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 8845–8848. [Google Scholar]
- Montanaro, M.; Levy, R.; Markham, B. On-orbit radiometric performance of the Landsat 8 Thermal Infrared Sensor. Remote Sens. 2014, 6, 11753–11769. [Google Scholar] [CrossRef]
- Montanaro, M.; Gerace, A.; Lunsford, A.; Reuter, D. Stray light artifacts in imagery from the Landsat 8 Thermal Infrared Sensor. Remote Sens. 2014, 6, 10435–10456. [Google Scholar] [CrossRef]
- Montanaro, M.; Gerace, A.; Rohrbach, S. Toward an operational stray light correction for the Landsat 8 Thermal Infrared Sensor. Appl. Opt. 2015, 54, 3963–3978. [Google Scholar] [CrossRef]
- Choi, T.; Xiong, X.; Wang, Z. On-orbit lunar modulation transfer function measurements for the moderate resolution imaging spectroradiometer. IEEE Trans. Geosci. Remote Sens. 2013, 52, 270–277. [Google Scholar] [CrossRef]
- Press, W.H.; Teukolsky, S.A. Savitzky-Golay smoothing filters. Comput. Phys. 1990, 4, 669–672. [Google Scholar] [CrossRef]
- Tanaka, T.; Sato, Y.; Kusakawa, Y.; Shimizu, K.; Tanaka, T.; Kim, S.K.; Komatsu, M.; Yoo, I.; Caesy, L.; Nakasuka, S. The operation results of earth image acquisitionusing extensible flexible optical telescope of “PRISM”. In Proceedings of the 27th International Symposium on Space Technology and Science (ISTS), Tsukuba, Japan, 5–12 July 2009. [Google Scholar]
- Shrivakshan, G.; Chandrasekar, C. A comparison of various edge detection techniques used in image processing. Int. J. Comput. Sci. Issues (IJCSI) 2012, 9, 269. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Focusing Test Schedule | Telescope Temperature (K) | Edge Site Location |
|---|---|---|
| Before 5 November 2021 14:30 UTC | 190 (nominal focus) | #1 |
| Between 5 November 2021 17:30 and 7 November 2021 15:30 UTC | 186 (−4 K) | #2 and #3 |
| Between 7 November 2021 21:30 and 9 November 2021 14:50 UTC | 194 (+4 K) | #4 and #5 |
| After 9 November 2021 19:30 UTC | 190 (nominal focus) | #6 |
| Edge Site Location | Path/Row | Lat., Lon. | Date | Direction | Telescope Temperature (K) |
|---|---|---|---|---|---|
| #1 | 157/042 | 25.4489, 59.29 | 5 November 2021 | Across-Track | 190 |
| #2 | 179/077 | −27.736, 14.752 | 6 November 2021 | Along-Track | 186 |
| #3 | 186/038 | 30.997, 17.560 | 7 November 2021 | Across-Track | 186 |
| #4 | 161/054 | 8.700, 50.382 | 8 November 2021 | Along-Track | 194 |
| #5 | 183/071 | −15.865, 11.735 | 9 November 2021 | Along-Track | 194 |
| #6 | 157/045 | 20.877, 58.749 | 10 November 2021 | Along-Track | 190 |
| Edge Slope | Edge Extent (m) | MTF Value at Nyquist | |||
|---|---|---|---|---|---|
| TIRS-2 | TIRS-1 | TIRS-2 | TIRS-1 | TIRS-2 | |
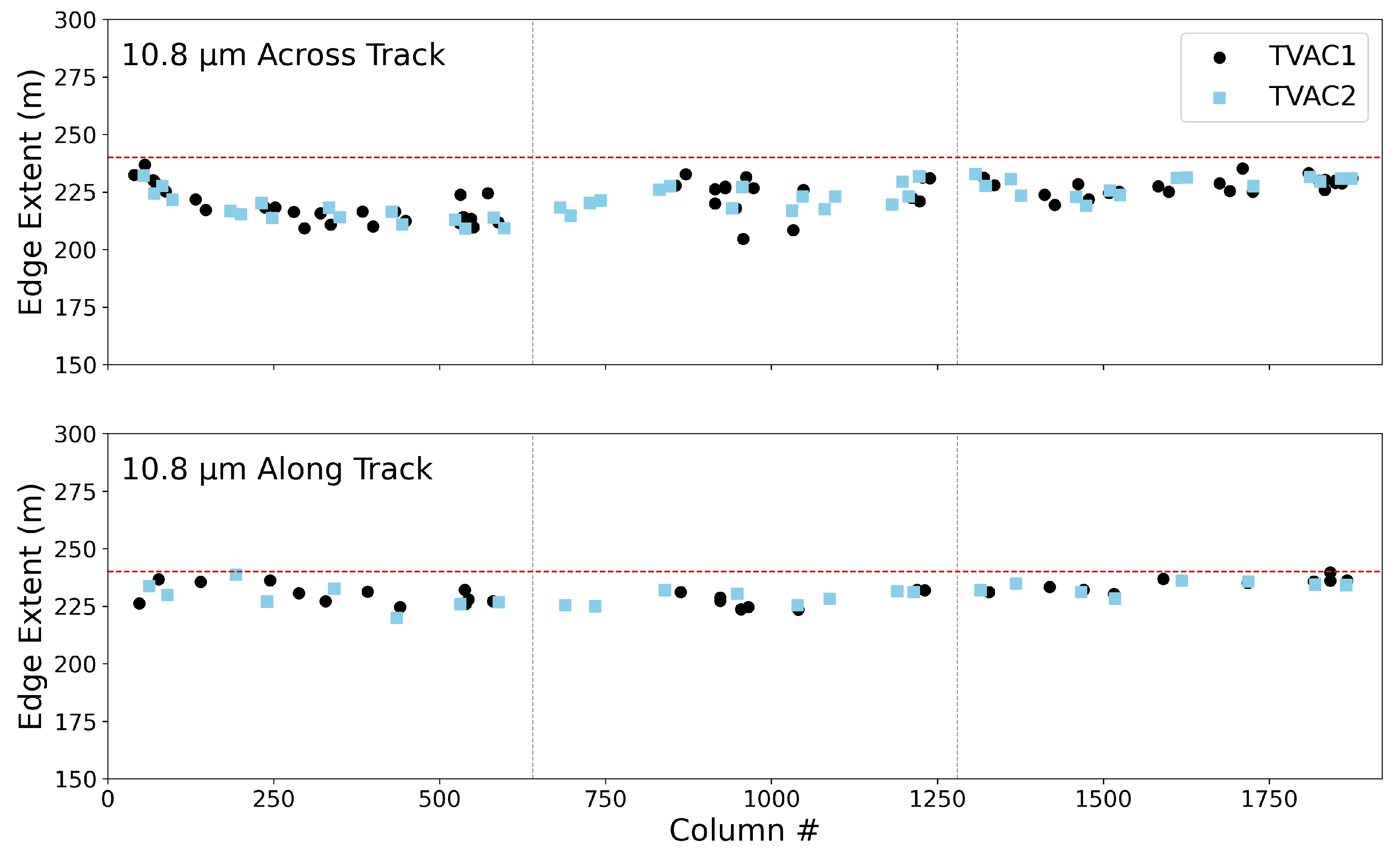
| 10.8 XT | 0.58 (0.01) | 0.59 (0.02) | 222.8 (7.4) | 202.8 (9.1) | 0.542 (0.01) |
| 10.8 AT | 0.55 (0.01) | 0.53 (0.03) | 230.8 (4.4) | 234.0 (17.1) | 0.516 (0.04) |
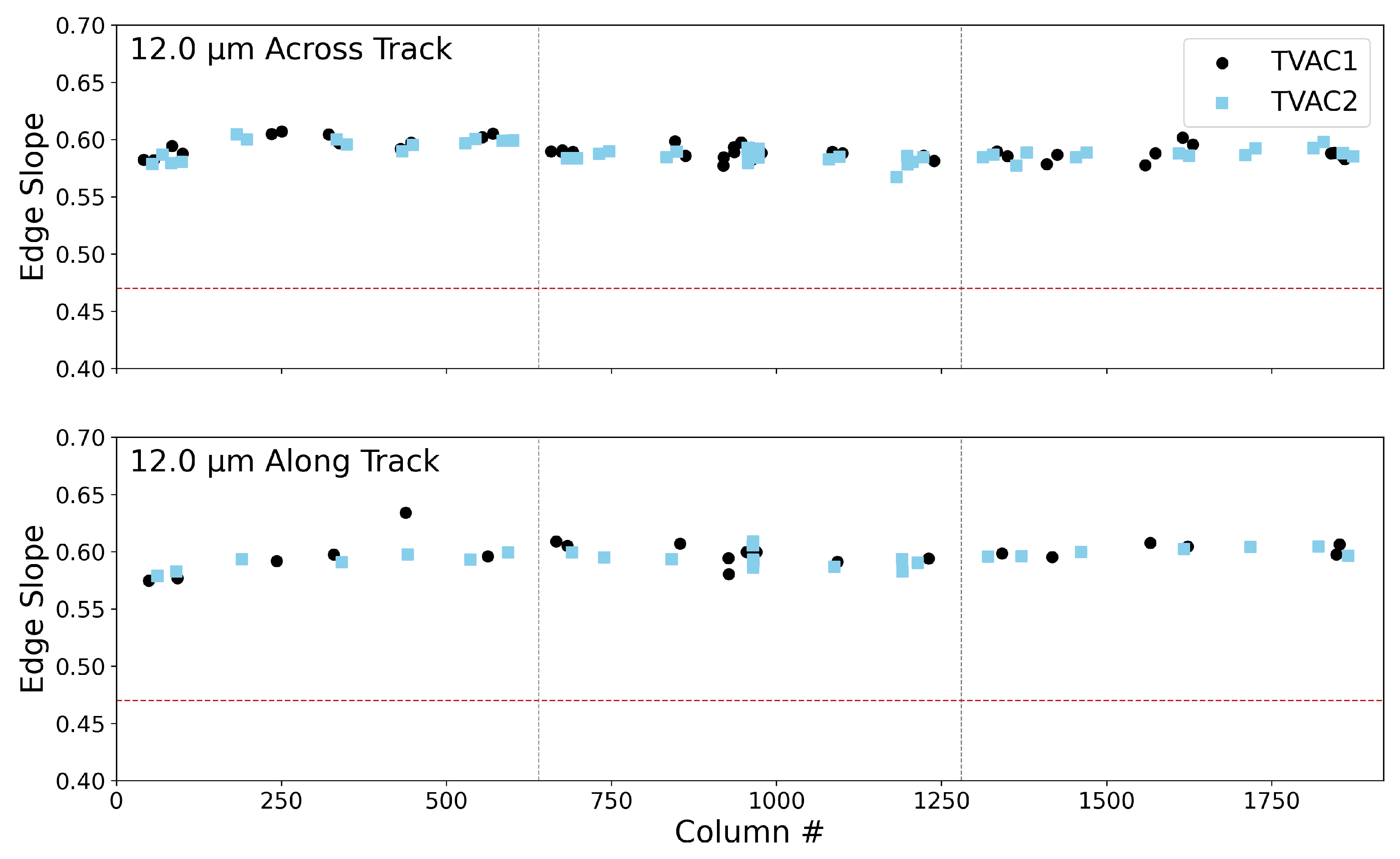
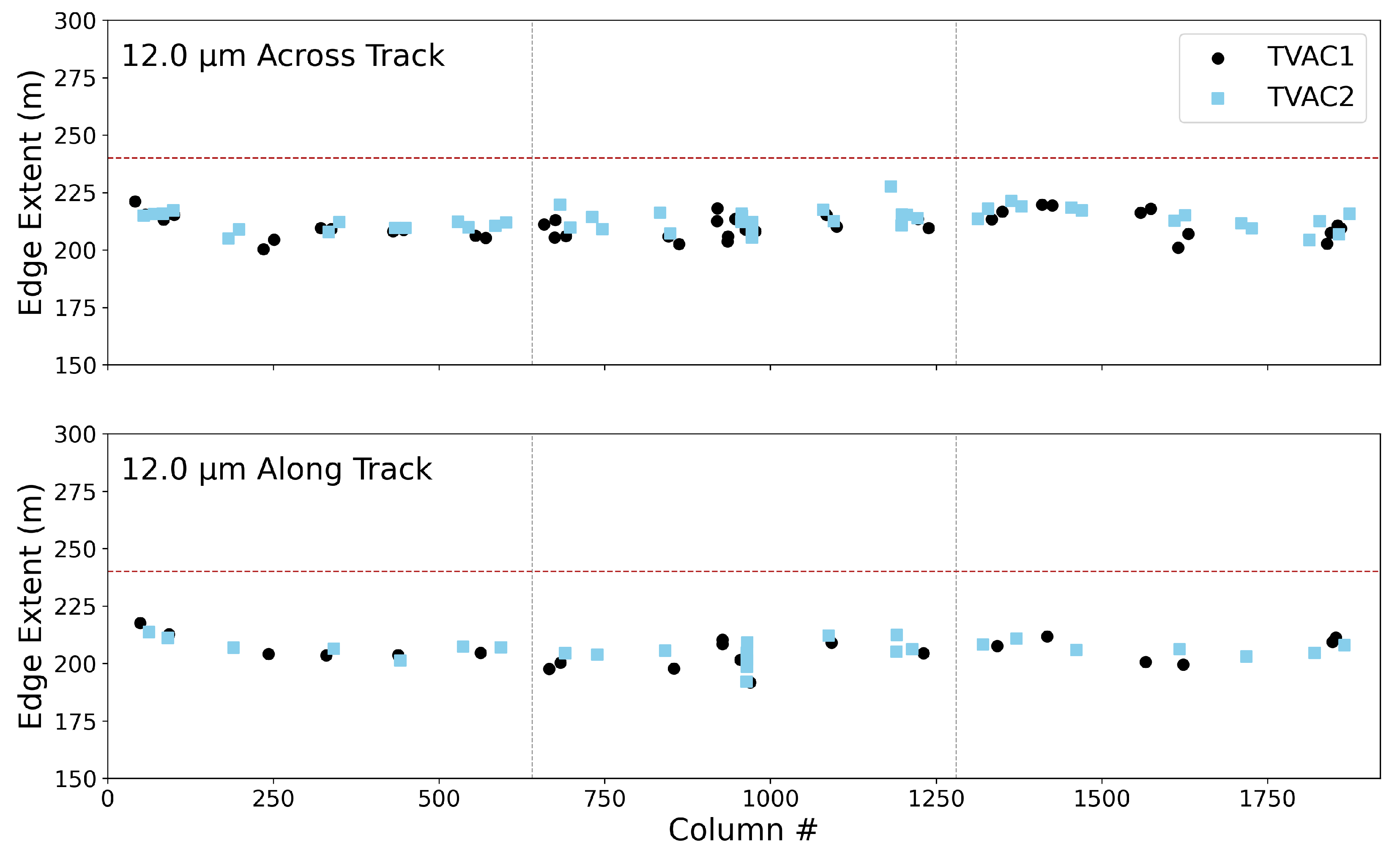
| 12.0 XT | 0.59 (0.01) | 0.61 (0.01) | 211.7 (4.9) | 197.6 (6.9) | 0.548 (0.01) |
| 12.0 AT | 0.60 (0.01) | 0.63 (0.02) | 205.6 (5.2) | 184.3 (10.9) | 0.556 (0.02) |
| Edge Site Location | SNR | Edge Slope | FWHM (m) | MTF Value at Nyquist | ||||
|---|---|---|---|---|---|---|---|---|
| L9 | L8 | L9 | L8 | L9 | L8 | L9 | L8 | |
| #1 | 93 | 105 | 0.647 [0.027] | 0.654 [0.018] | 195 [3.54] | 196 [3.60] | 0.020 [0.004] | 0.019 [0.003] |
| #2 | 73 | 114 | 0.586 [0.022] | 0.636 [0.036] | 226 [7.21] | 206 [6.14] | 0.010 [0.004] | 0.015 [0.004] |
| #3 | 60 | 99 | 0.507 [0.031] | 0.697 [0.035] | 215 [8.06] | 206 [4.55] | 0.018 [0.006] | 0.022 [0.005] |
| #4 | 90 | 63 | 0.492 [0.034] | 0.531 [0.087] | 226 [13.75] | 228 [15.09] | 0.016 [0.004] | 0.013 [0.002] |
| #5 | 54 | 68 | 0.377 [0.036] | 0.471 [0.010] | 213 [4.45] | 206 [6.58] | 0.015 [0.004] | 0.018 [0.004] |
| #6 | 54 | 67 | 0.425 [0.023] | 0.480 [0.021] | 216 [12.88] | 212 [10.33] | 0.017 [0.005] | 0.014 [0.004] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Eon, R.; Wenny, B.N.; Poole, E.; Eftekharzadeh Kay, S.; Montanaro, M.; Gerace, A.; Thome, K.J. Landsat 9 Thermal Infrared Sensor-2 (TIRS-2) Pre- and Post-Launch Spatial Response Performance. Remote Sens. 2024, 16, 1065. https://doi.org/10.3390/rs16061065
Eon R, Wenny BN, Poole E, Eftekharzadeh Kay S, Montanaro M, Gerace A, Thome KJ. Landsat 9 Thermal Infrared Sensor-2 (TIRS-2) Pre- and Post-Launch Spatial Response Performance. Remote Sensing. 2024; 16(6):1065. https://doi.org/10.3390/rs16061065
Chicago/Turabian StyleEon, Rehman, Brian N. Wenny, Ethan Poole, Sarah Eftekharzadeh Kay, Matthew Montanaro, Aaron Gerace, and Kurtis J. Thome. 2024. "Landsat 9 Thermal Infrared Sensor-2 (TIRS-2) Pre- and Post-Launch Spatial Response Performance" Remote Sensing 16, no. 6: 1065. https://doi.org/10.3390/rs16061065
APA StyleEon, R., Wenny, B. N., Poole, E., Eftekharzadeh Kay, S., Montanaro, M., Gerace, A., & Thome, K. J. (2024). Landsat 9 Thermal Infrared Sensor-2 (TIRS-2) Pre- and Post-Launch Spatial Response Performance. Remote Sensing, 16(6), 1065. https://doi.org/10.3390/rs16061065