

Enhanced Interactive Rendering for Rovers of Lunar Polar Region and Martian Surface



Abstract
1. Introduction
2. Related Work
2.1. Advancement of In situ Exploration
2.2. Sensors on Planetary Rovers
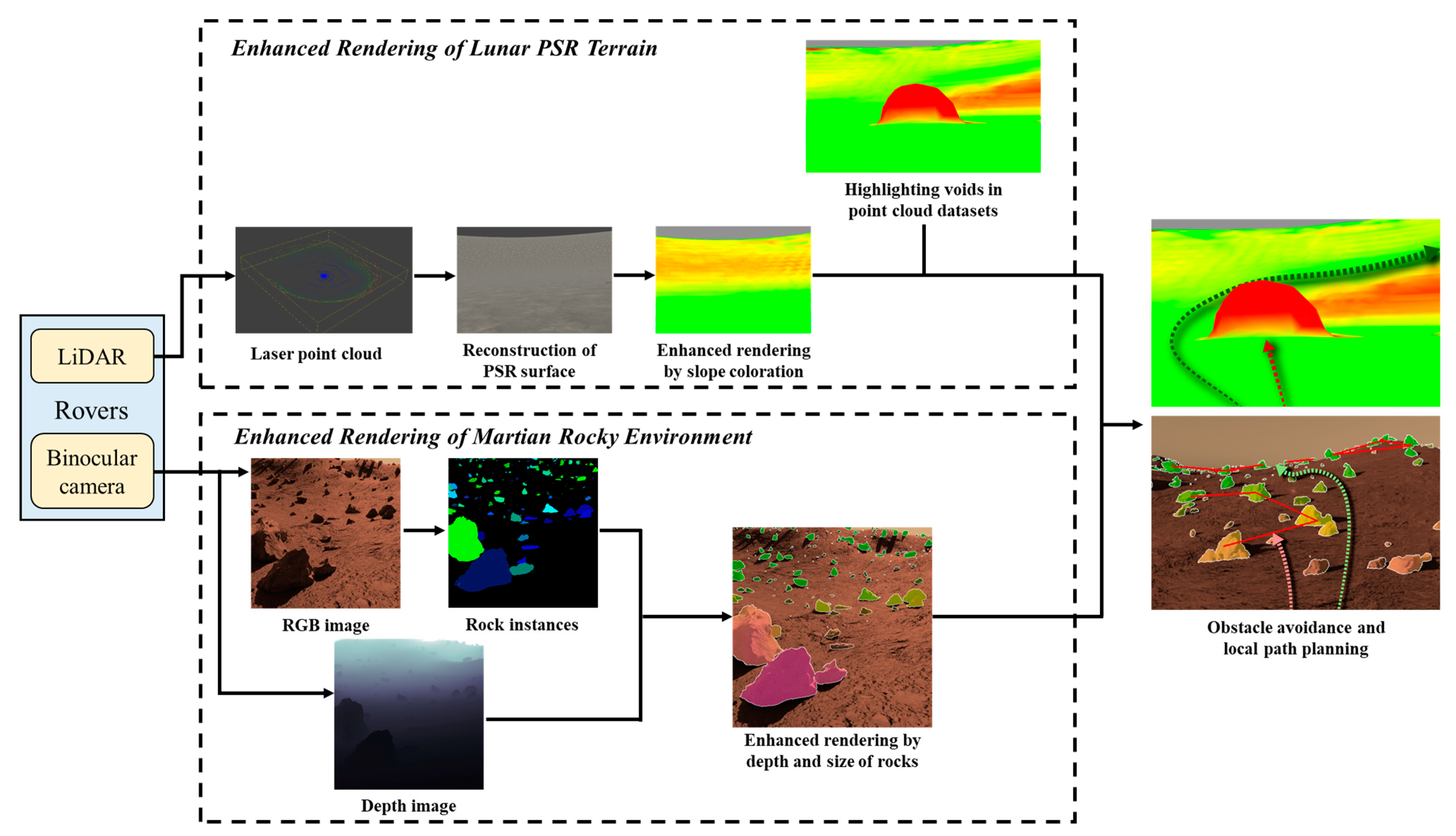
3. Methodology
3.1. Virtual Lunar Environment
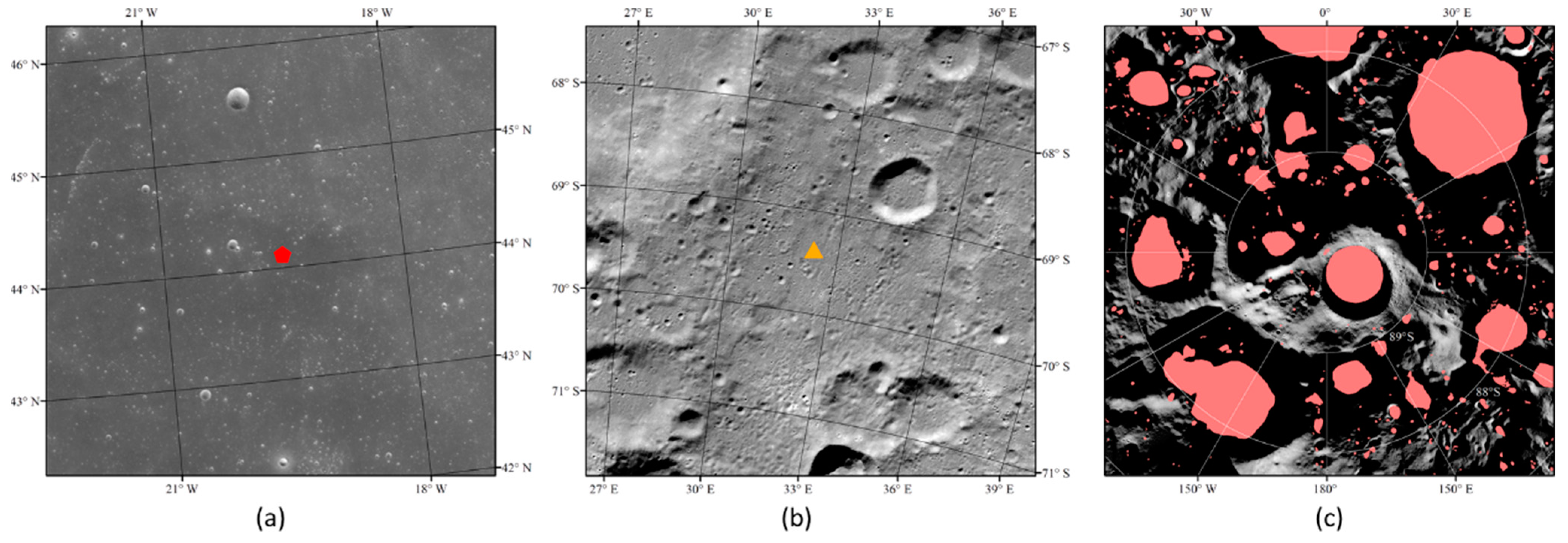
3.1.1. Moon Data
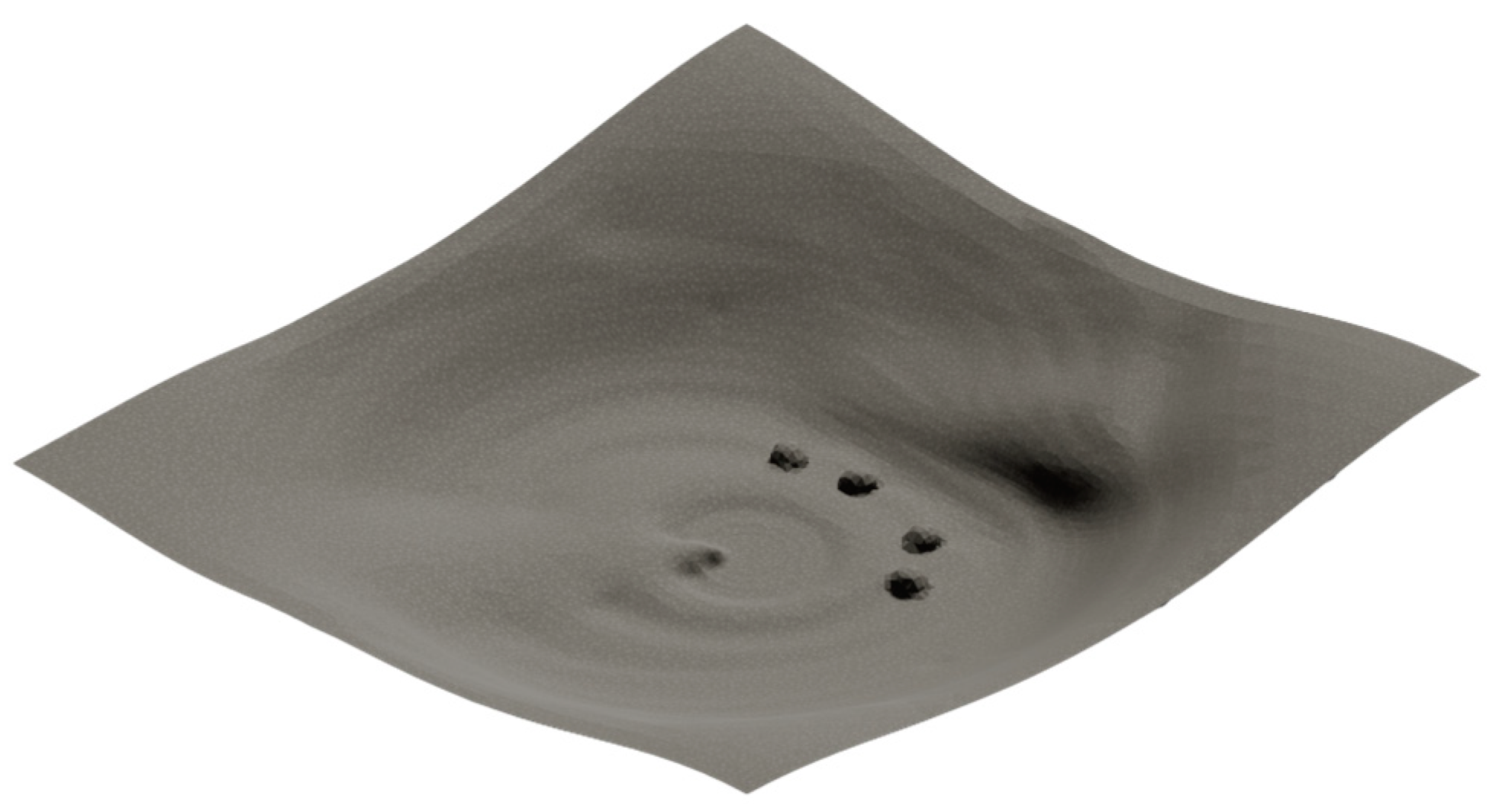
3.1.2. Simulation of Lunar PSR Terrain
3.2. Virtual Martian Environment
3.2.1. Mars Data
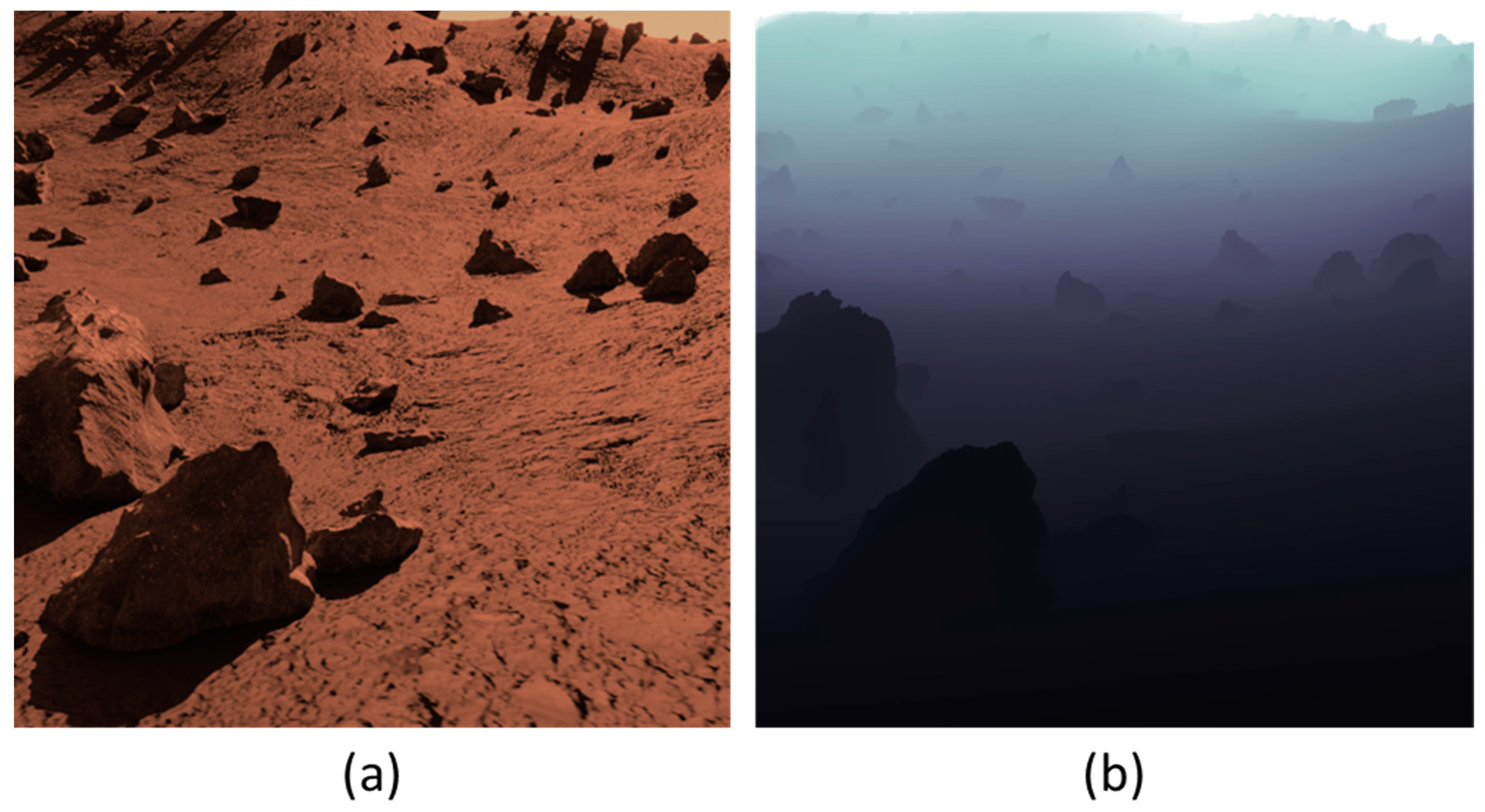
3.2.2. Simulation of Martian Rocky Environment
3.3. Algorithm for Enhanced Interactive Rendering
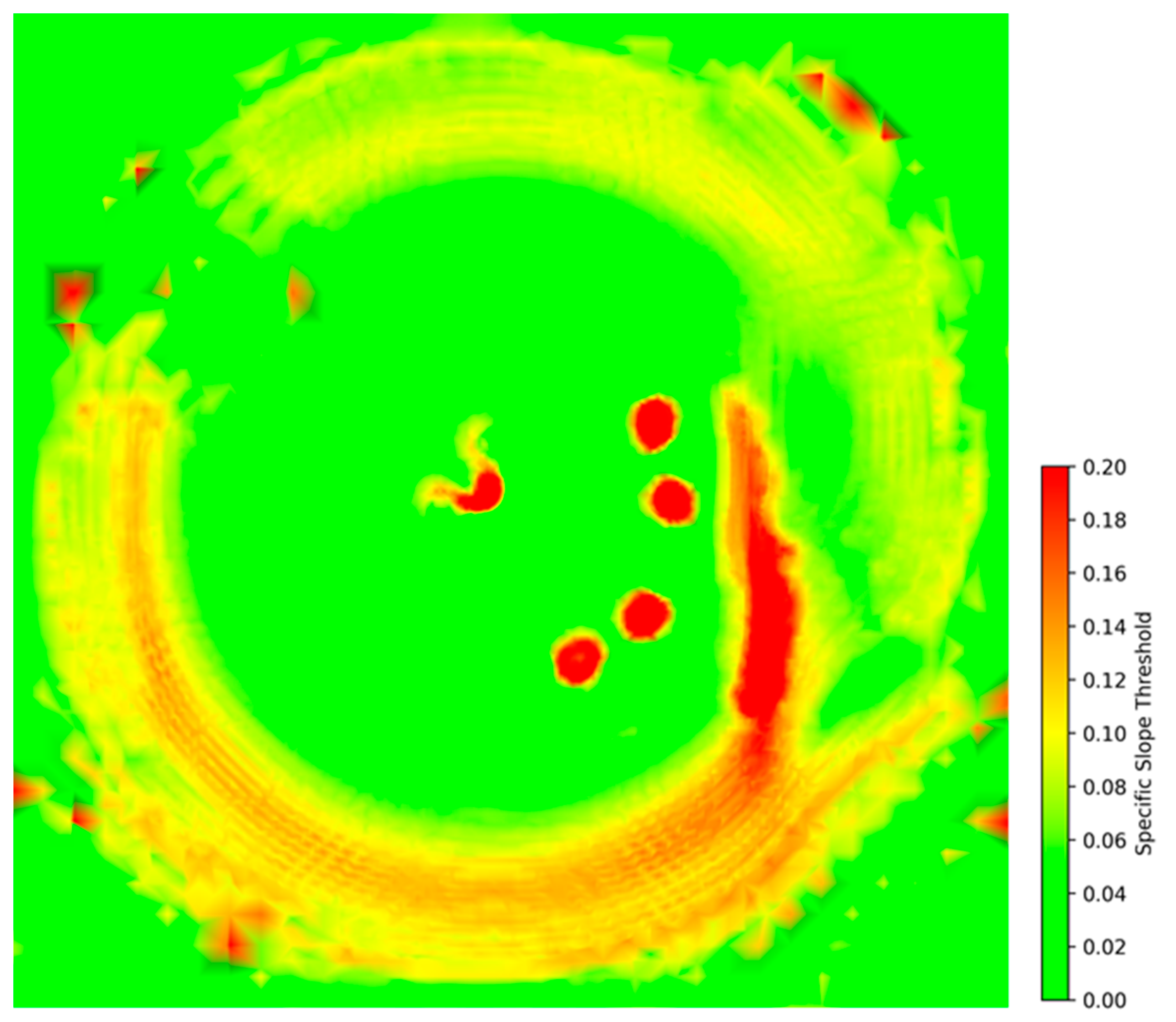
3.3.1. Data Process of Point Cloud of Lunar PSR Terrain
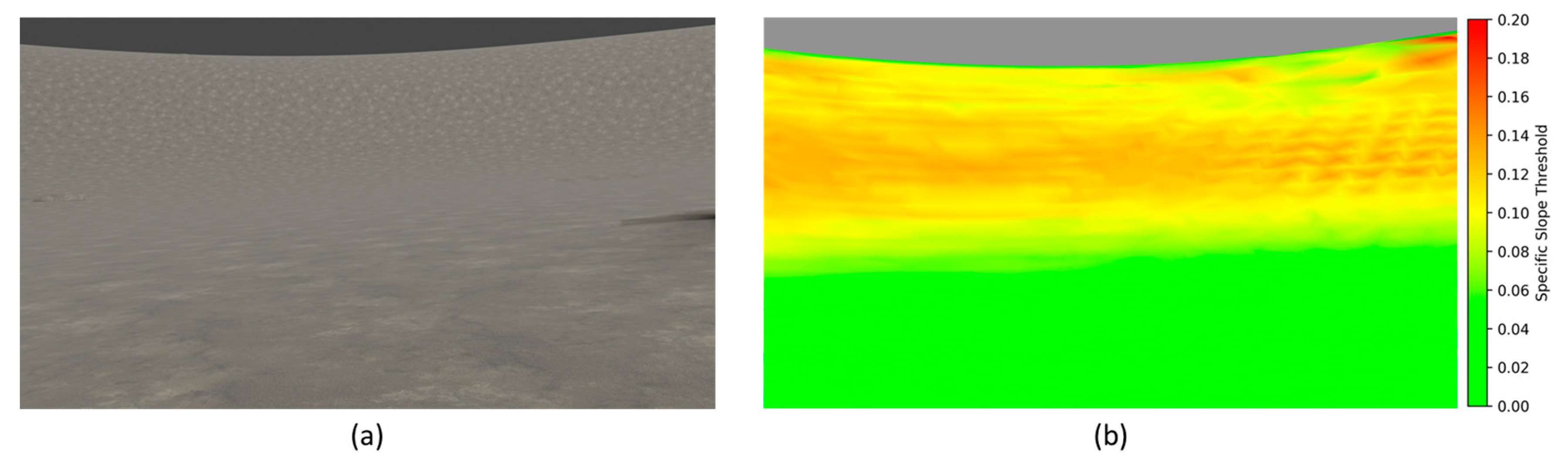
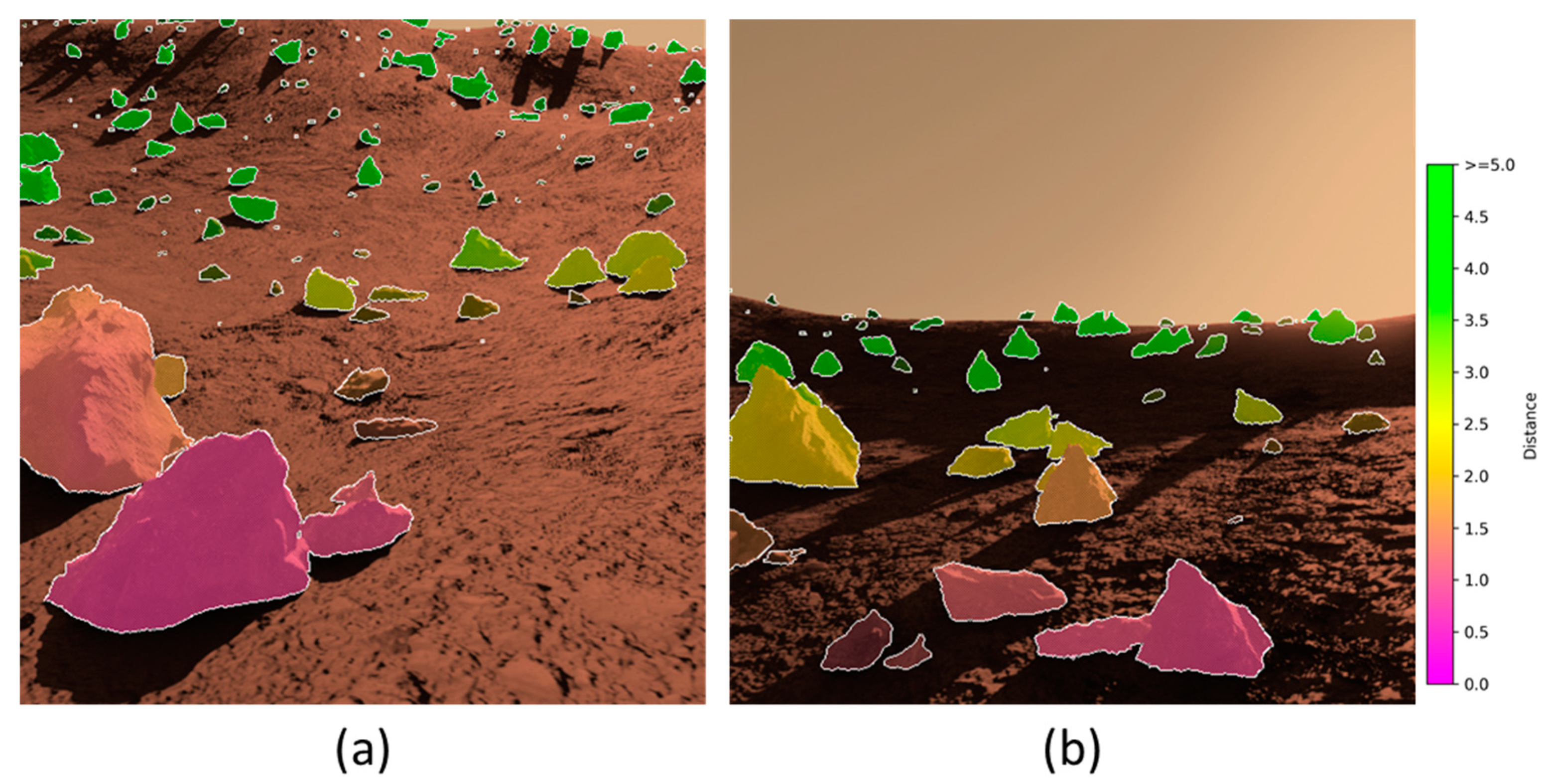
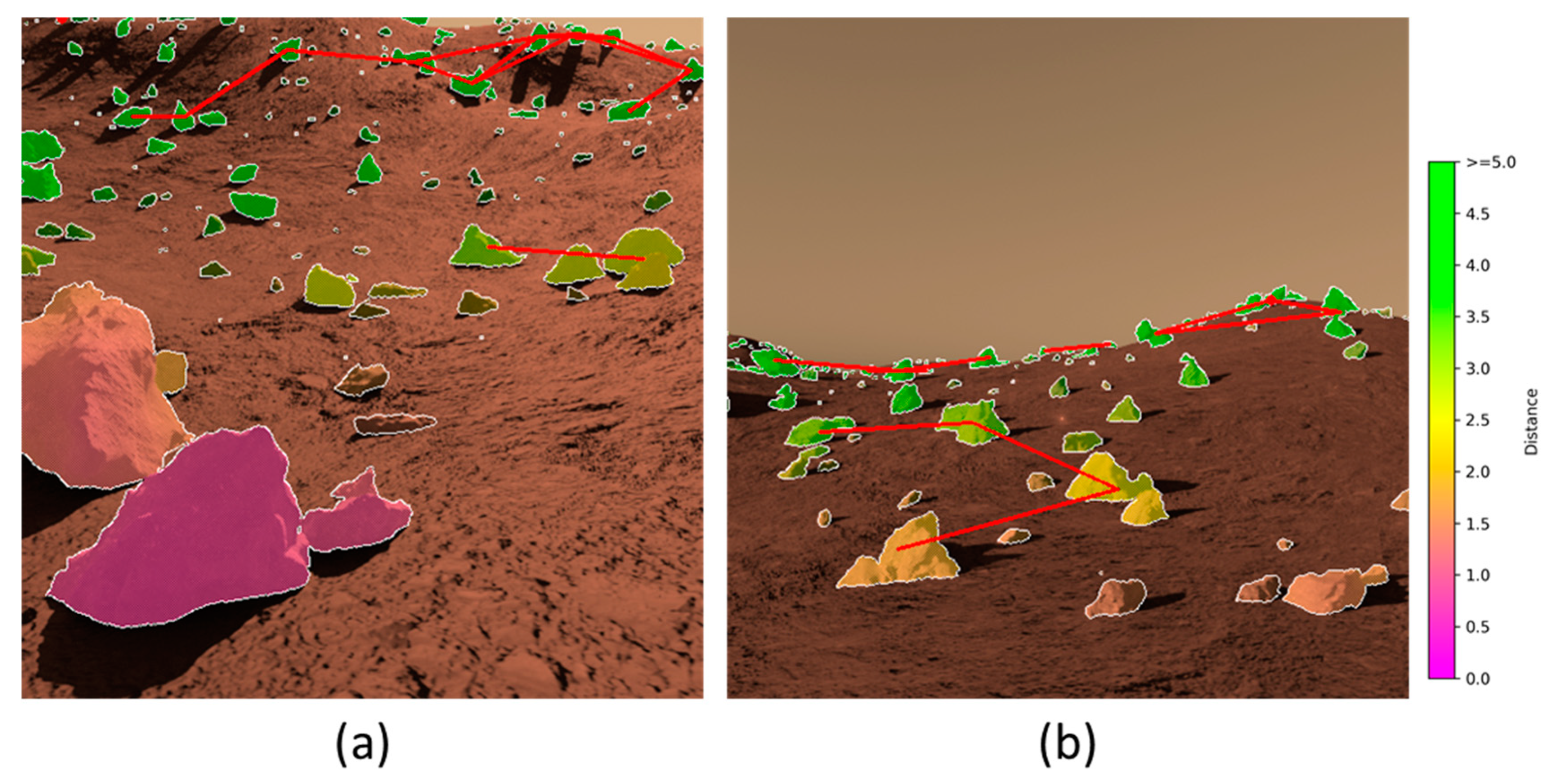
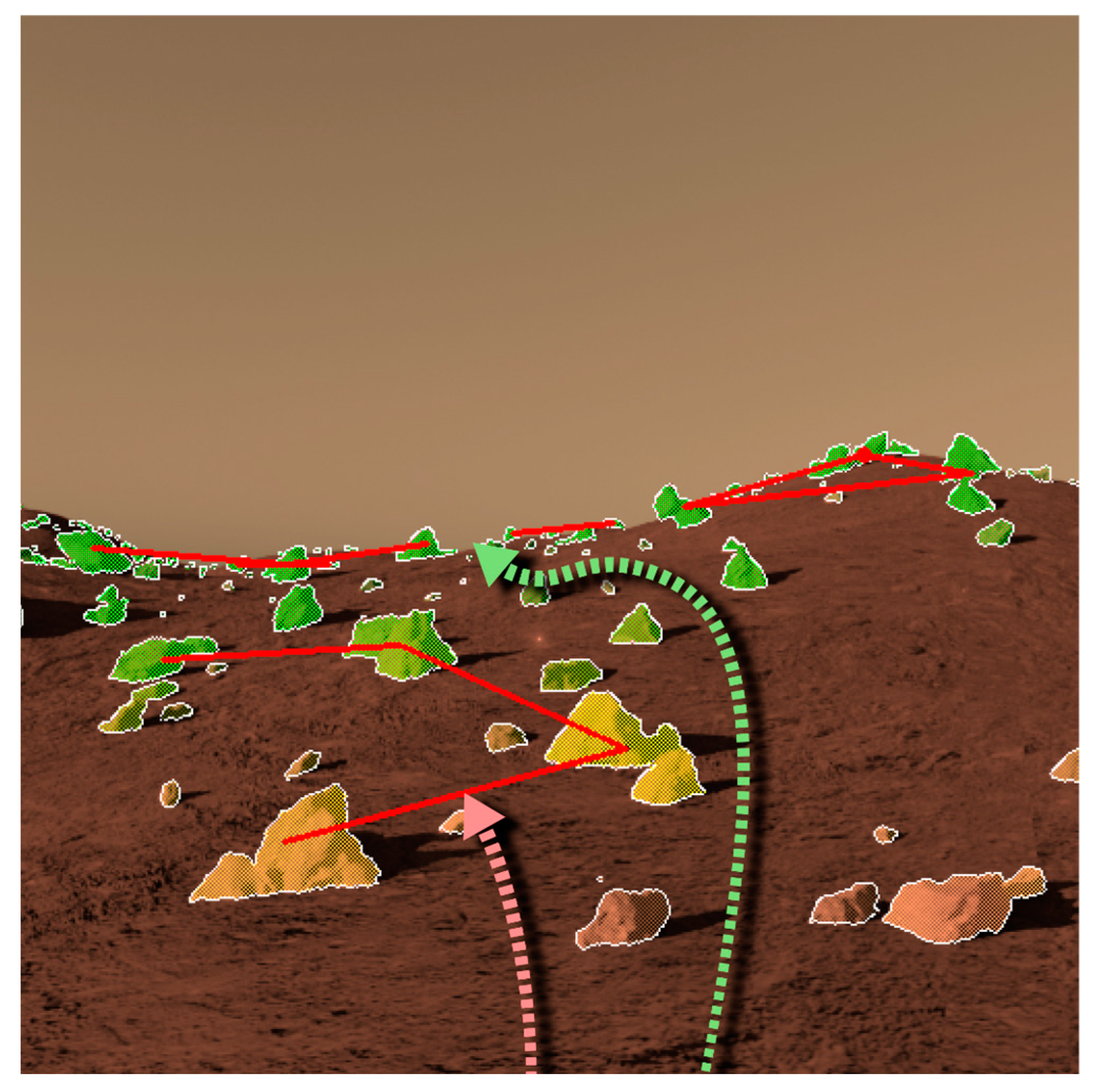
3.3.2. Data Process of Panoramic Cameras of Martian Rocky Environment
4. Experiment and Analysis
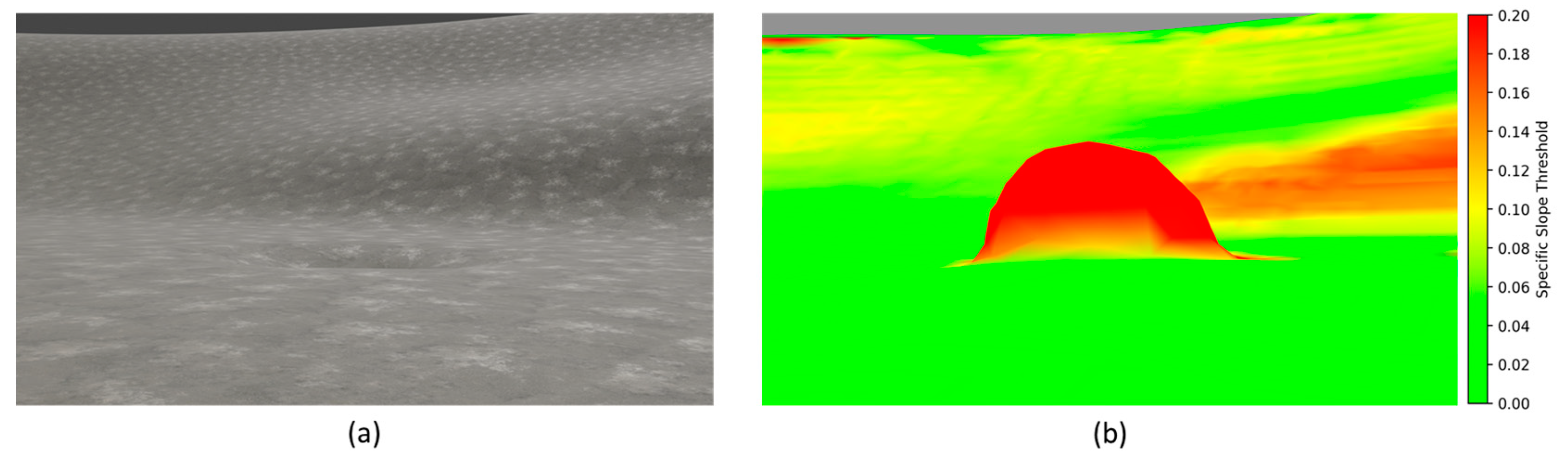
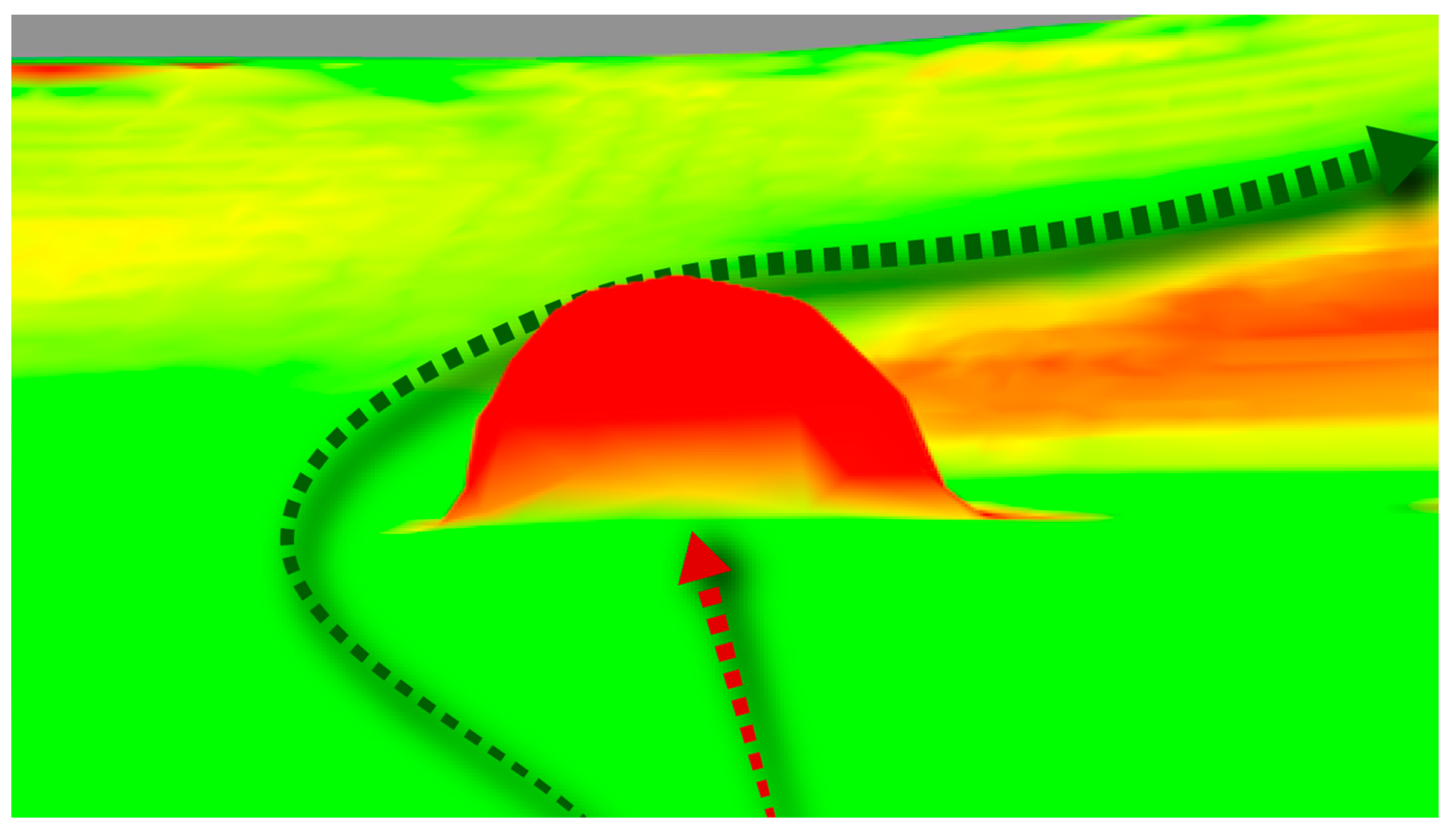
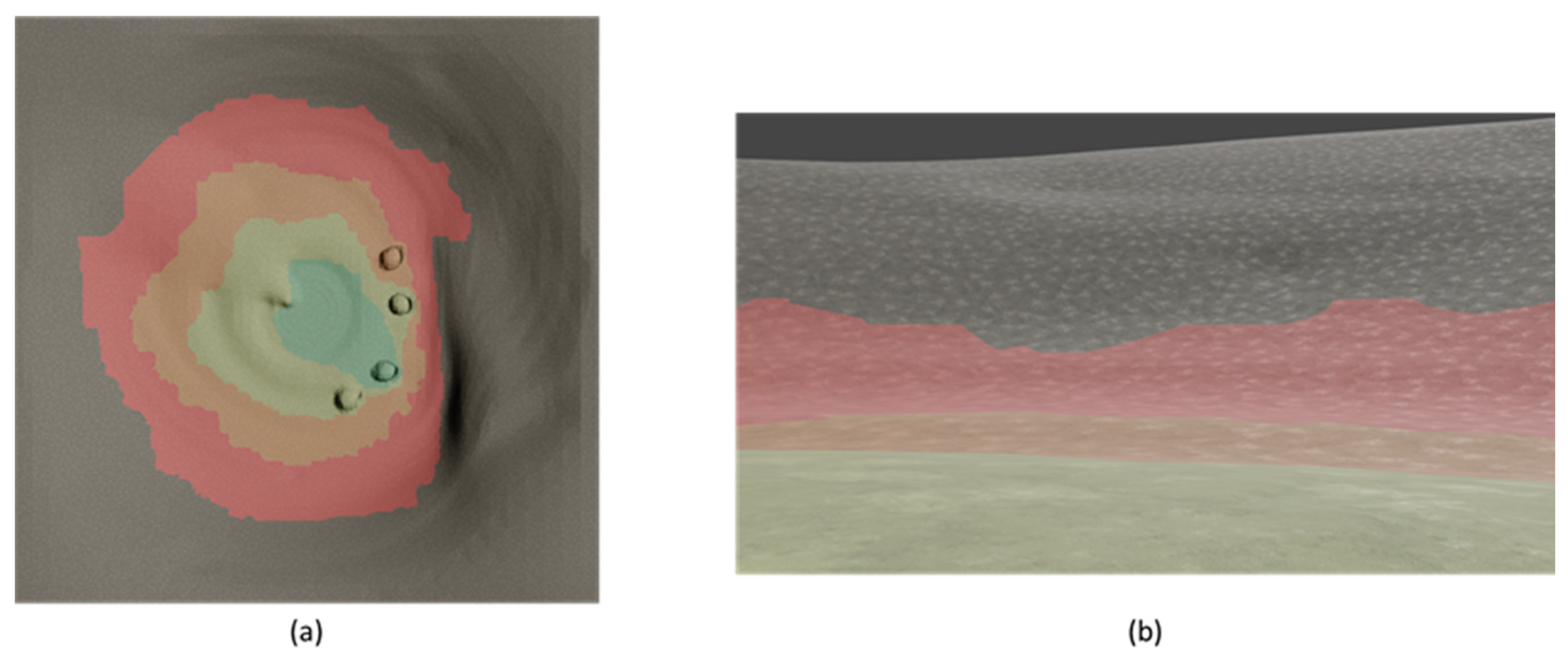
4.1. Enhanced Interactive Rendering of Lunar PSR Terrain
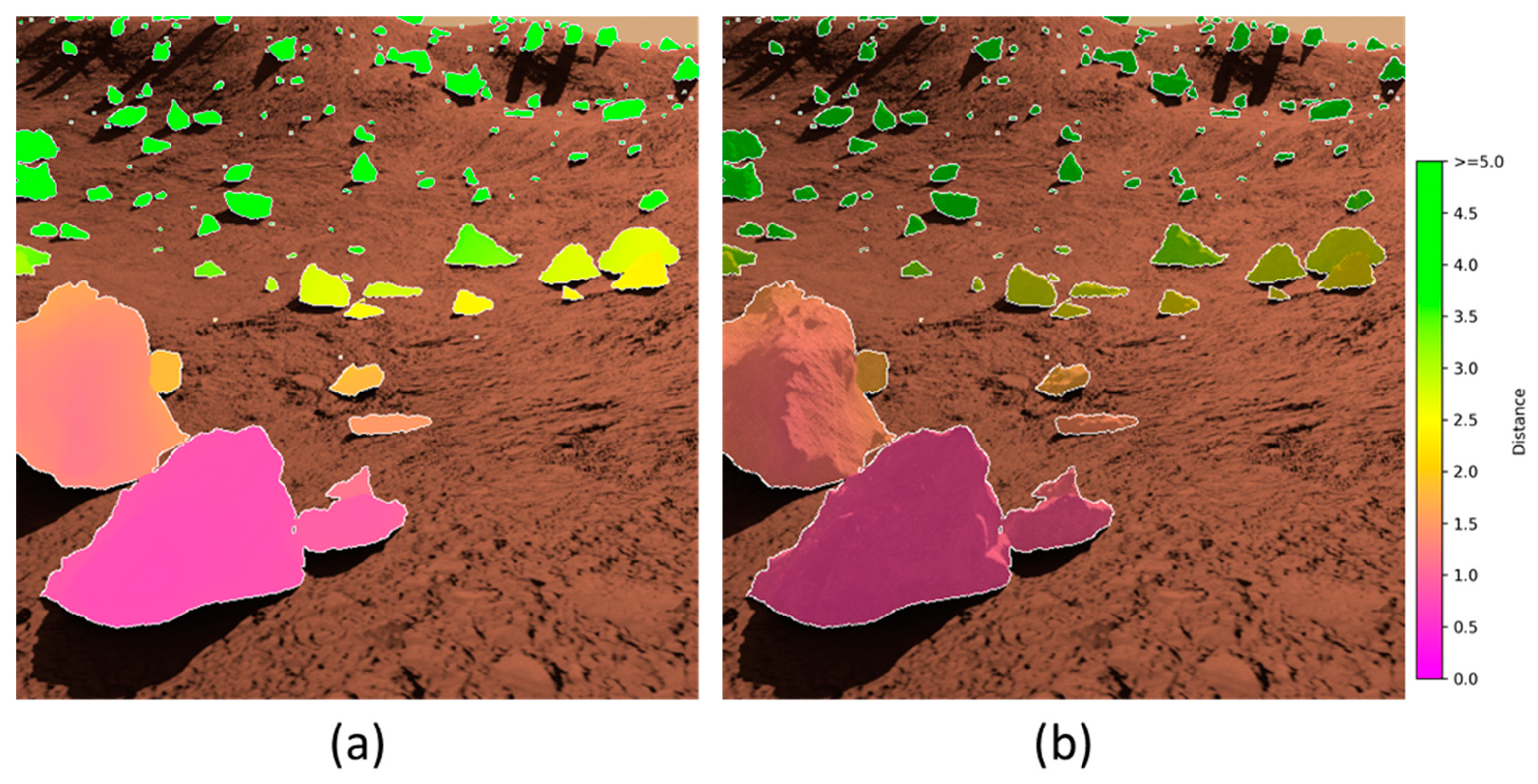
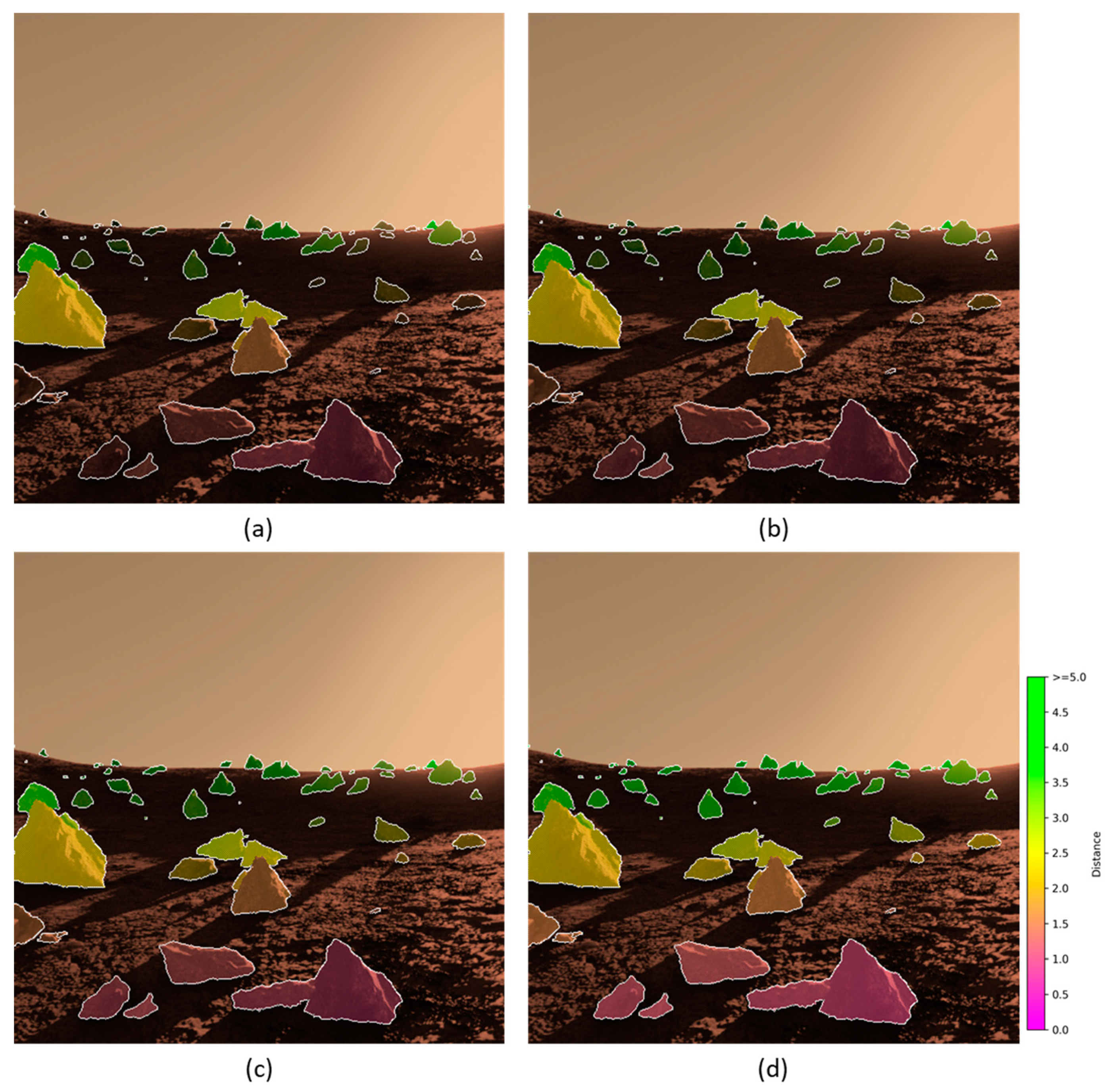
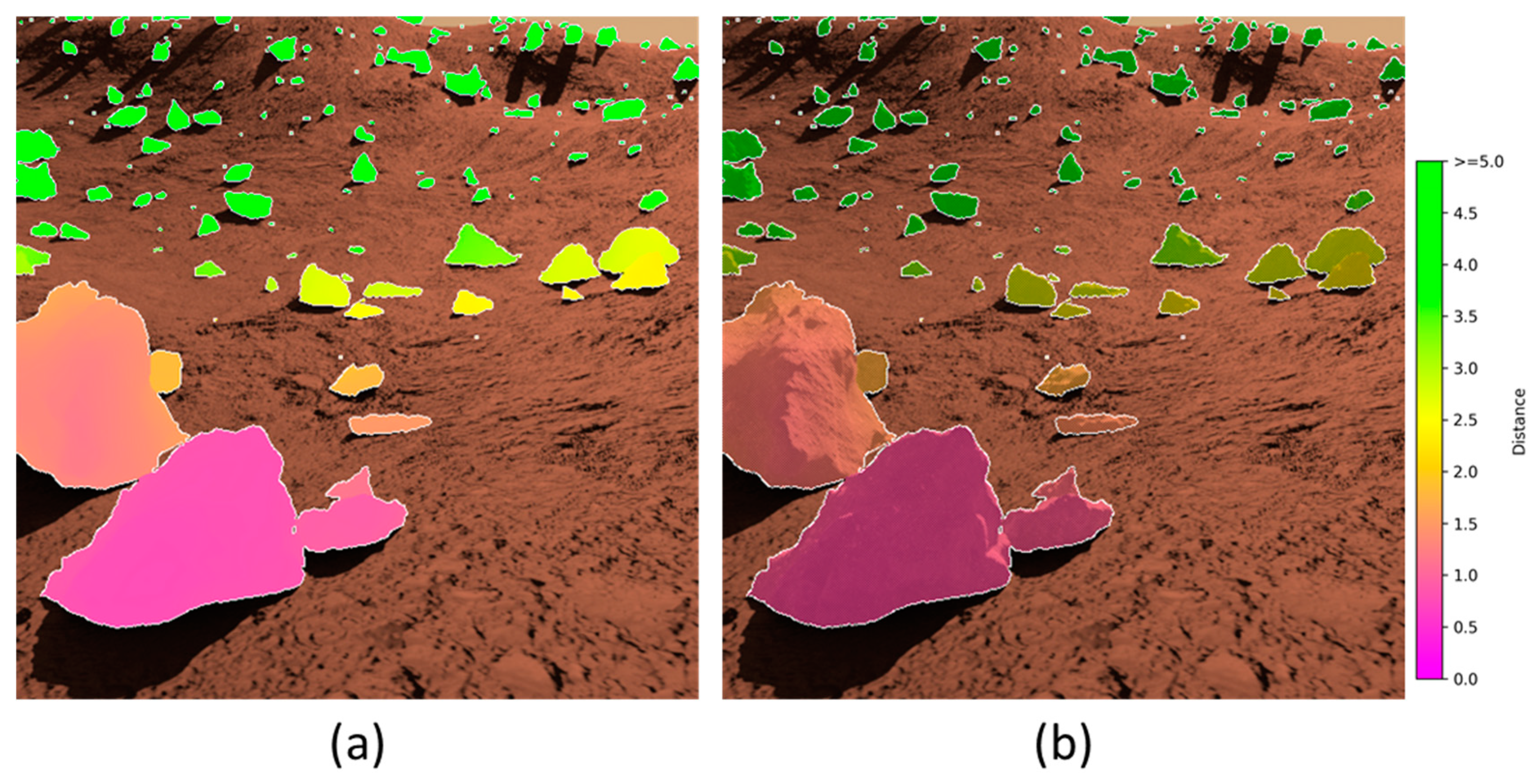
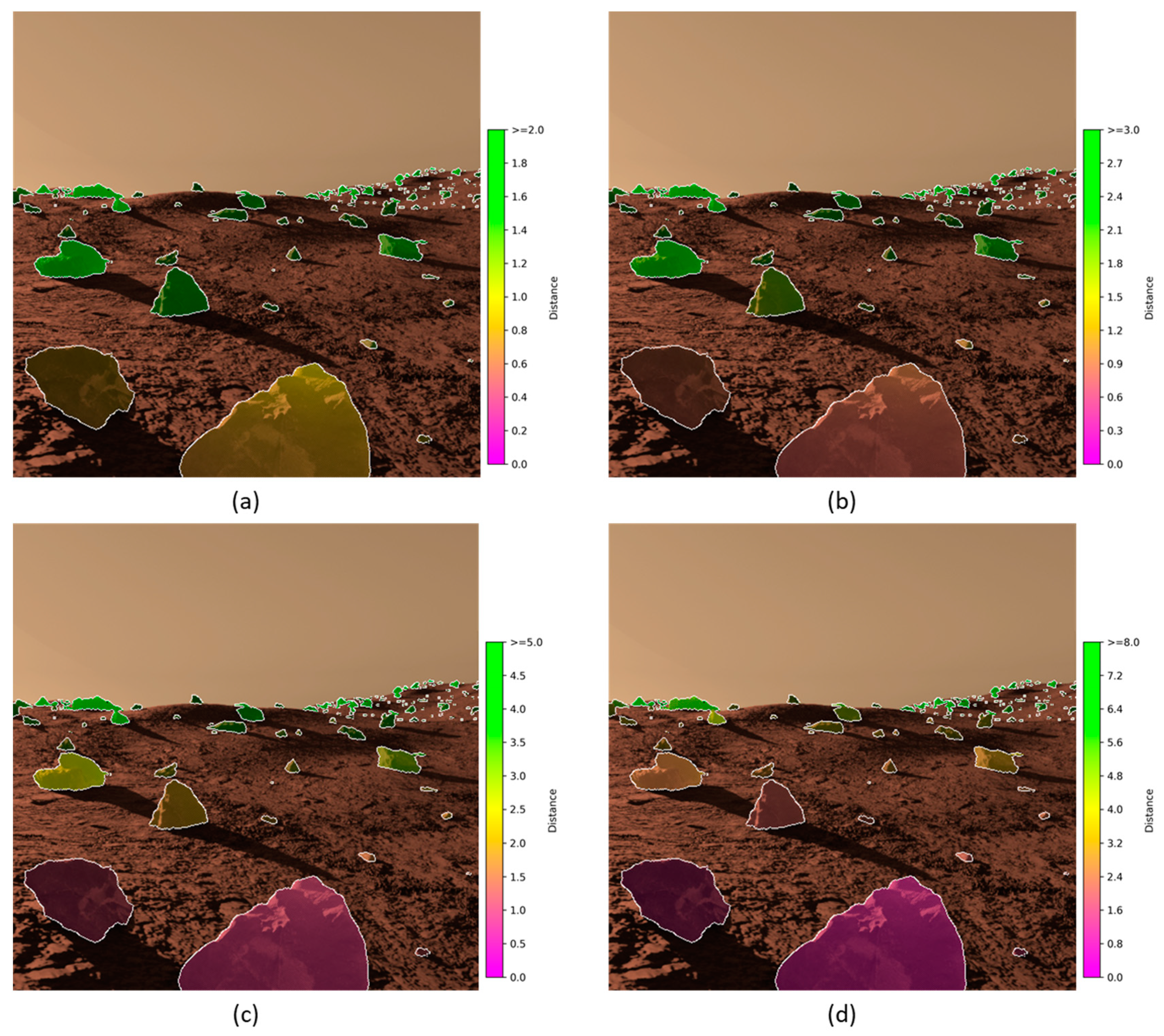
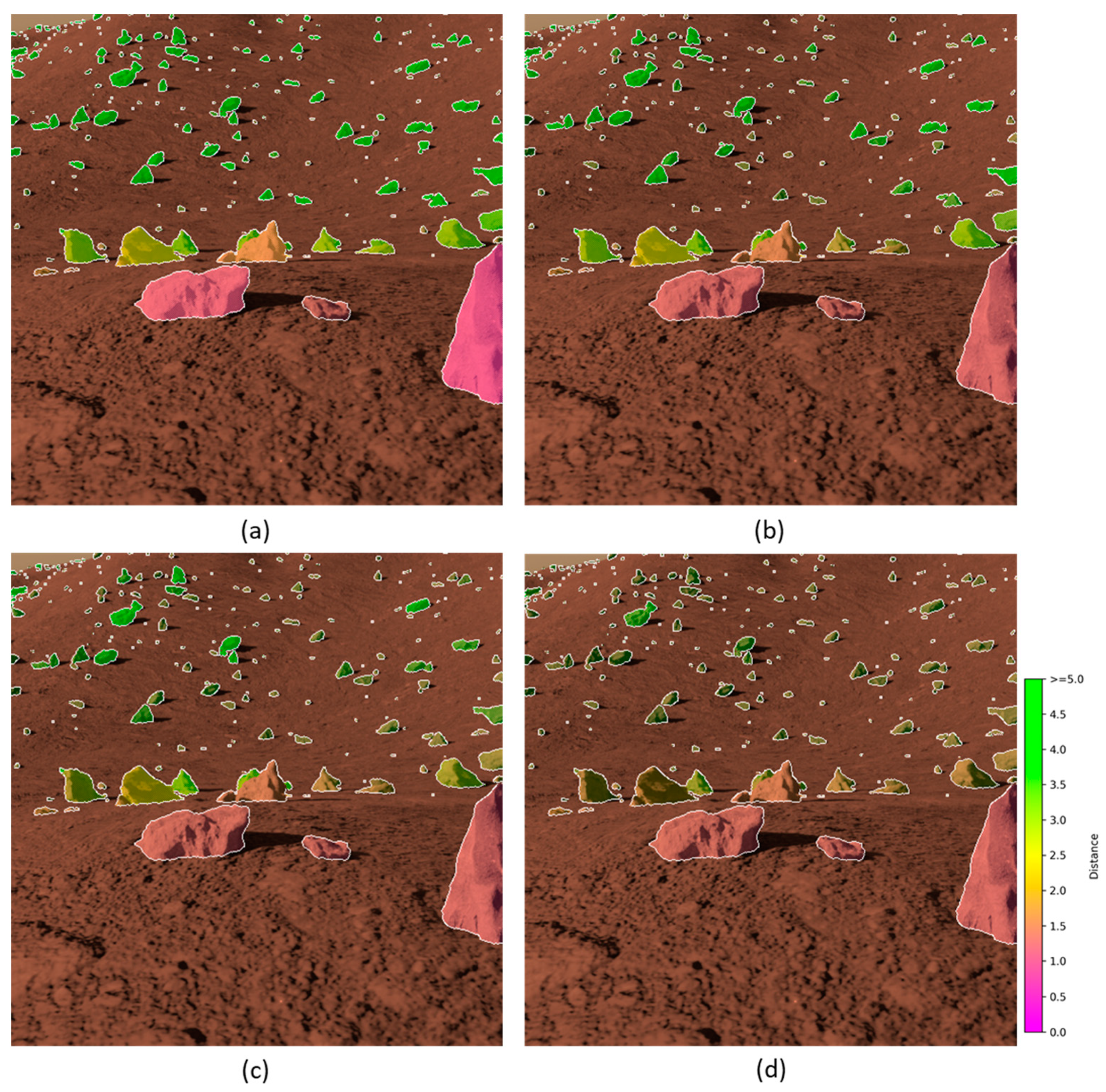
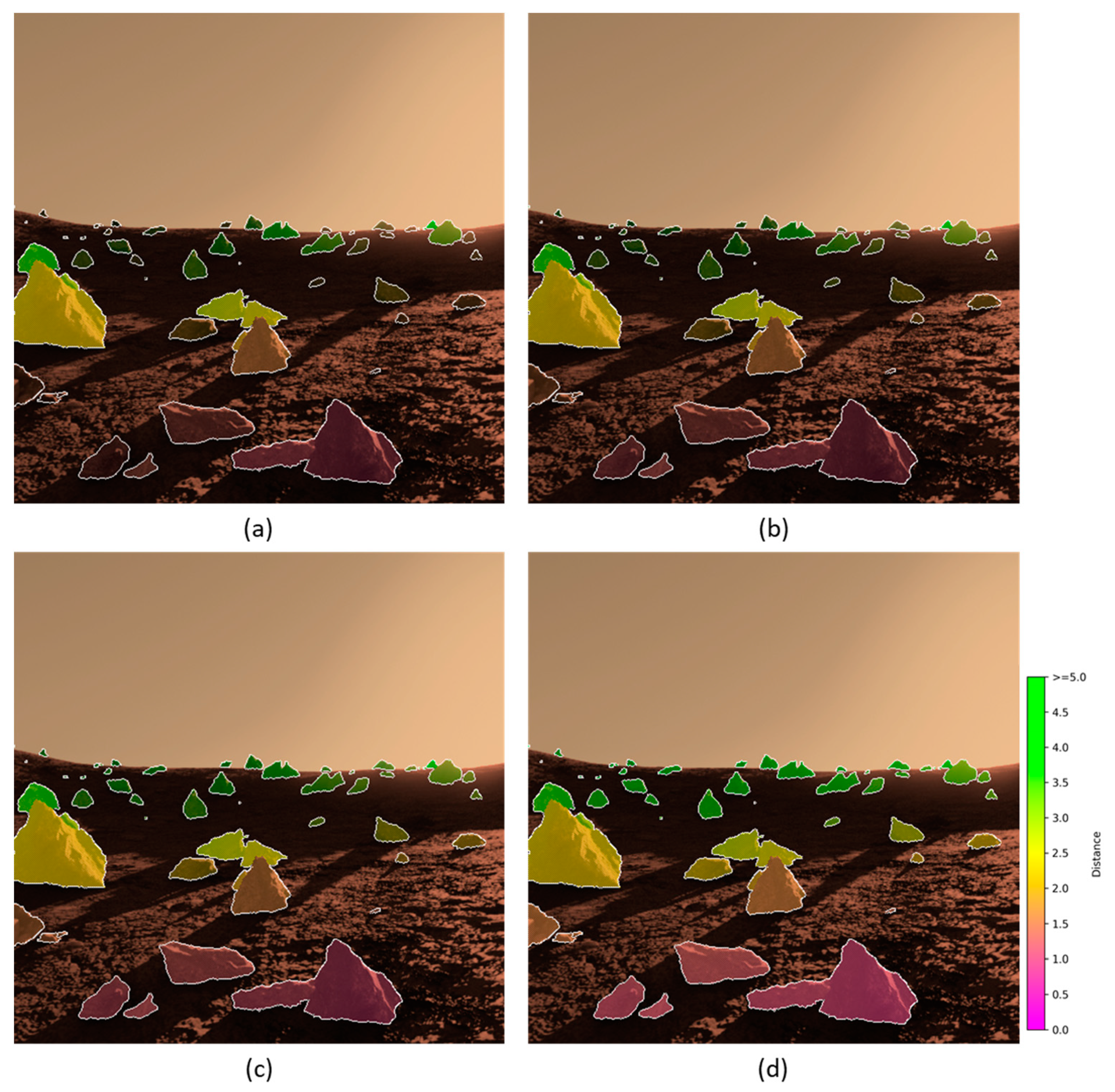
4.2. Enhanced Interactive Rendering of Martian Rocky Environment
4.3. Discussion
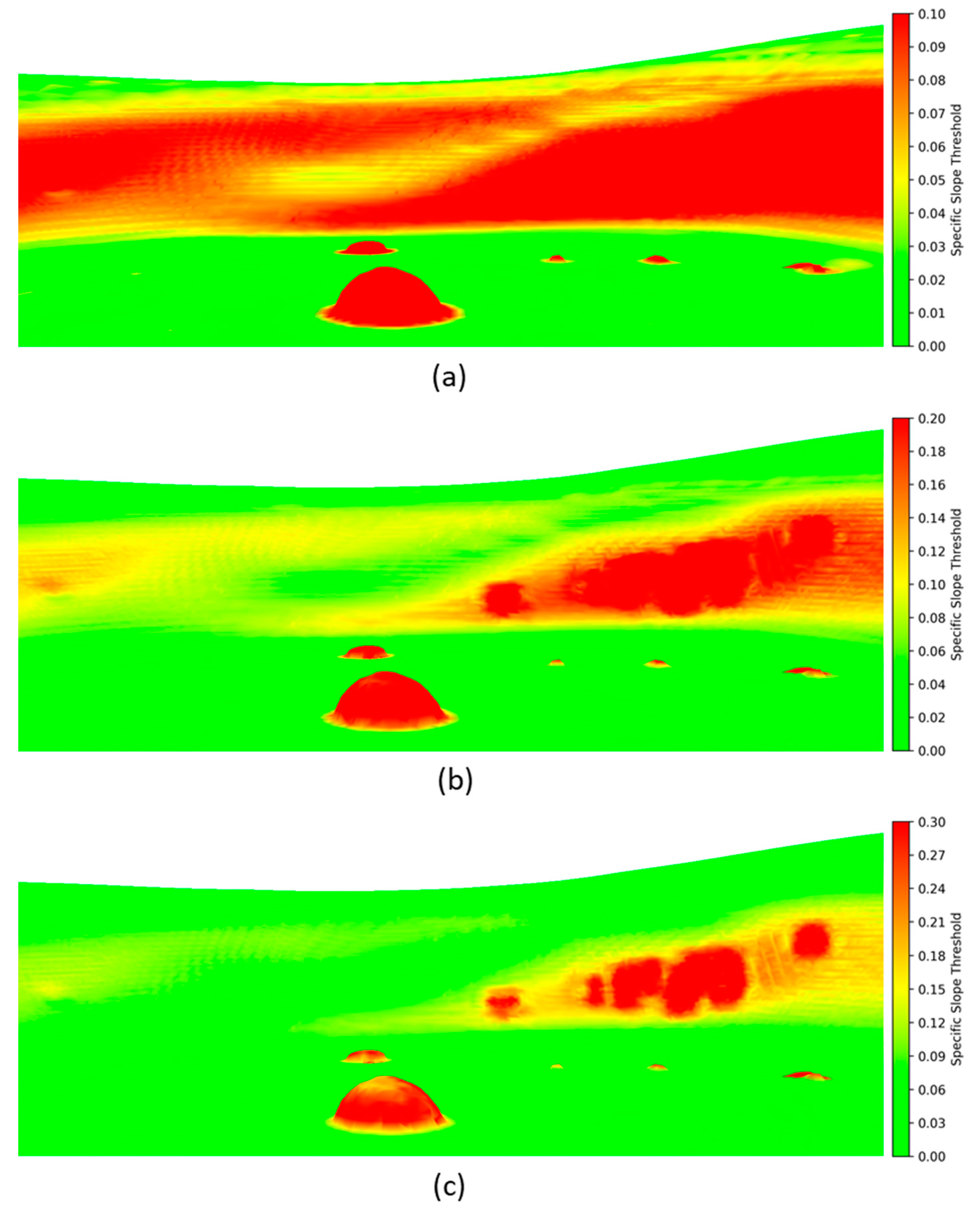
4.3.1. Parameter Settings for Enhanced Rendering
4.3.2. Results Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- McKay, C.P.; Stoker, C.R. The Early Environment and Its Evolution on Mars: Implication for Life. Rev. Geophys. 1989, 27, 189–214. [Google Scholar] [CrossRef]
- Davila, A.F.; Schulze-Makuch, D. The Last Possible Outposts for Life on Mars. Astrobiology 2016, 16, 159–168. [Google Scholar] [CrossRef] [PubMed]
- Tian, H.; Zhang, T.; Jia, Y.; Peng, S.; Yan, C. Zhurong: Features and Mission of China’s First Mars Rover. Innovation 2021, 2, 100121. [Google Scholar] [CrossRef] [PubMed]
- Squyres, S.W.; Knoll, A.H.; Arvidson, R.E.; Ashley, J.W.; Bell, J.F.; Calvin, W.M.; Christensen, P.R.; Clark, B.C.; Cohen, B.A.; de Souza, P.A.; et al. Exploration of Victoria Crater by the Mars Rover Opportunity. Science 2009, 324, 1058–1061. [Google Scholar] [CrossRef] [PubMed]
- Wiens, R.C.; Maurice, S.; Robinson, S.H.; Nelson, A.E.; Cais, P.; Bernardi, P.; Newell, R.T.; Clegg, S.; Sharma, S.K.; Storms, S.; et al. The SuperCam Instrument Suite on the NASA Mars 2020 Rover: Body Unit and Combined System Tests. Space Sci. Rev. 2020, 217, 4. [Google Scholar] [CrossRef] [PubMed]
- Coates, A.J.; Jaumann, R.; Griffiths, A.D.; Leff, C.E.; Schmitz, N.; Josset, J.-L.; Paar, G.; Gunn, M.; Hauber, E.; Cousins, C.R.; et al. The PanCam Instrument for the ExoMars Rover. Astrobiology 2017, 17, 511–541. [Google Scholar] [CrossRef]
- Crisp, J.A.; Adler, M.; Matijevic, J.R.; Squyres, S.W.; Arvidson, R.E.; Kass, D.M. Mars Exploration Rover Mission. J. Geophys. Res. Planets 2003, 108. [Google Scholar] [CrossRef]
- Lin, H.; Xu, R.; Yang, W.; Lin, Y.; Wei, Y.; Hu, S.; He, Z.; Qiao, L.; Wan, W. In Situ Photometric Experiment of Lunar Regolith With Visible and Near-Infrared Imaging Spectrometer On Board the Yutu-2 Lunar Rover. J. Geophys. Res. Planets 2020, 125, e2019JE006076. [Google Scholar] [CrossRef]
- Wu, F.; Wang, X.; Wei, H.; Liu, J.; Liu, F.; Yang, J. Panoramic Mosaics from Chang’E-3 PCAM Images at Point A. Remote Sens. 2016, 8, 812. [Google Scholar] [CrossRef]
- Li, C.; Zuo, W.; Wen, W.; Zeng, X.; Gao, X.; Liu, Y.; Fu, Q.; Zhang, Z.; Su, Y.; Ren, X.; et al. Overview of the Chang’e-4 Mission: Opening the Frontier of Scientific Exploration of the Lunar Far Side. Space Sci Rev 2021, 217, 35. [Google Scholar] [CrossRef]
- Matthies, L.; Chen, B.; Petrescu, J. Stereo Vision, Residual Image Processing and Mars Rover Localization. In Proceedings of the 1997 International Conference on Image Processing (ICIP ’97) 3-Volume Set-Volume 3, Santa Barbara, CA, USA, 26 October 1997; IEEE Computer Society: Washington, DC, USA, 1997; Volume 3, p. 248. [Google Scholar]
- Hu, J.; Peng, X.; Xu, Z. Study of Gray Image Pseudo-Color Processing Algorithms. In Proceedings of the 6th International Symposium on Advanced Optical Manufacturing and Testing Technologies: Large Mirrors and Telescopes, Xiamen, China, 26–29 April 2012; Volume 8415, pp. 323–328. [Google Scholar]
- Humm, D.C.; Kinczyk, M.J.; Brylow, S.M.; Wagner, R.V.; Speyerer, E.J.; Estes, N.M.; Mahanti, P.; Boyd, A.K.; Robinson, M.S. Calibration of ShadowCam. J. Astron. Space Sci. 2023, 40, 173–197. [Google Scholar] [CrossRef]
- Zhou, Y.; Li, X.; Hua, B. Crater Identification Simulation Using LiDAR on Lunar Rover. Measurement 2023, 210, 112550. [Google Scholar] [CrossRef]
- Puente, I.; González-Jorge, H.; Martínez-Sánchez, J.; Arias, P. Review of Mobile Mapping and Surveying Technologies. Measurement 2013, 46, 2127–2145. [Google Scholar] [CrossRef]
- Rychkov, I.; Brasington, J.; Vericat, D. Computational and Methodological Aspects of Terrestrial Surface Analysis Based on Point Clouds. Comput. Geosci. 2012, 42, 64–70. [Google Scholar] [CrossRef]
- Lee, J.; Lee, K.; Yoo, A.; Moon, C. Design and Implementation of Edge-Fog-Cloud System through HD Map Generation from LiDAR Data of Autonomous Vehicles. Electronics 2020, 9, 2084. [Google Scholar] [CrossRef]
- Li, Y.; Xiao, Z.; Ma, C.; Zeng, L.; Zhang, W.; Peng, M.; Li, A. Extraction and Analysis of Three-Dimensional Morphological Features of Centimeter-Scale Rocks in Zhurong Landing Region. J. Geophys. Res. Planets 2023, 128, e2022JE007656. [Google Scholar] [CrossRef]
- Golombek, M.; Rapp, D. Size-Frequency Distributions of Rocks on Mars and Earth Analog Sites: Implications for Future Landed Missions. J. Geophys. Res. Planets 1997, 102, 4117–4129. [Google Scholar] [CrossRef]
- Christensen, P.R. The Spatial Distribution of Rocks on Mars. Icarus 1986, 68, 217–238. [Google Scholar] [CrossRef]
- Sinclair, A.J.; Fitz-Coy, N.G. Comparison of Obstacle Avoidance Strategies for Mars Landers. J. Spacecr. Rocket. 2003, 40, 388–395. [Google Scholar] [CrossRef]
- Noever, D.A.; Noever, S.M. Rock Hunting With Martian Machine Vision. arXiv 2021, arXiv:2104.04359. [Google Scholar]
- Zhu, F.; Zhang, Y.; Zheng, Y.; Guo, S.; Hua, B.; Liu, Y.; Wu, F.; Li, L.; Chen, J.; Dong, C.; et al. Design and Verification of Multi-Functional Obstacle Avoidance Sensor for the Tianwen-1 Mars Probe. Space Sci. Rev. 2023, 219, 42. [Google Scholar] [CrossRef]
- Colaprete, A.; Andrews, D.; Bluethmann, W.; Elphic, R.; Bussey, B.; Trimble, J.P.; Zacny, K.; Captain, J. An Overview of the Volatiles Investigating Polar Exploration Rover (VIPER) Mission. In Proceedings of the International Small Satellite Conference, Virtual, 11 December 2019. [Google Scholar]
- Wei, G.; Li, X.; Zhang, W.; Tian, Y.; Jiang, S.; Wang, C.; Ma, J. Illumination Conditions near the Moon’s South Pole: Implication for a Concept Design of China’s Chang’E−7 Lunar Polar Exploration. Acta Astronaut. 2023, 208, 74–81. [Google Scholar] [CrossRef]
- Brown, H.M.; Boyd, A.K.; Denevi, B.W.; Henriksen, M.R.; Manheim, M.R.; Robinson, M.S.; Speyerer, E.J.; Wagner, R.V. Resource Potential of Lunar Permanently Shadowed Regions. Icarus 2022, 377, 114874. [Google Scholar] [CrossRef]
- Sowers, G.F.; Dreyer, C.B. Ice Mining in Lunar Permanently Shadowed Regions. New Space 2019, 7, 235–244. [Google Scholar] [CrossRef]
- Sanin, A.B.; Mitrofanov, I.G.; Litvak, M.L.; Malakhov, A.; Boynton, W.V.; Chin, G.; Droege, G.; Evans, L.G.; Garvin, J.; Golovin, D.V.; et al. Testing Lunar Permanently Shadowed Regions for Water Ice: LEND Results from LRO. J. Geophys. Res. Planets 2012, 117. [Google Scholar] [CrossRef]
- Prasad, K.D.; Misra, D.; Amitabh; Bhatt, M.; Ambily, G.; Sathyan, S.; Srivastava, N.; Bhardwaj, A. Chandrayaan-3 Alternate Landing Site: Pre-Landing Characterisation. arXiv 2023, arXiv:2308.10712. [Google Scholar]
- Vajiram, J.; Maurya, U.; Senthil, N. India’s Progress in Space Exploration and International Legal Challenges in Meeting Goals within International Space Boundaries: A Review. arXiv 2023, arXiv:2309.06560. [Google Scholar]
- Kanu, N.J.; Gupta, E.; Verma, G.C. An Insight into India’s Moon Mission—Chandrayan-3: The First Nation to Land on the Southernmost Polar Region of the Moon. Planet. Space Sci. 2024, 242, 105864. [Google Scholar] [CrossRef]
- Creech, S.; Guidi, J.; Elburn, D. Artemis: An Overview of NASA’s Activities to Return Humans to the Moon. In Proceedings of the 2022 IEEE Aerospace Conference (AERO), Big Sky, MT, USA, 5–12 March 2022; pp. 1–7. [Google Scholar]
- Smith, M.; Craig, D.; Herrmann, N.; Mahoney, E.; Krezel, J.; McIntyre, N.; Goodliff, K. The Artemis Program: An Overview of NASA’s Activities to Return Humans to the Moon. In Proceedings of the 2020 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2020; pp. 1–10. [Google Scholar]
- Sibeck, D.G.; Angelopoulos, V.; Brain, D.A.; Delory, G.T.; Eastwood, J.P.; Farrell, W.M.; Grimm, R.E.; Halekas, J.S.; Hasegawa, H.; Hellinger, P.; et al. ARTEMIS Science Objectives. In The ARTEMIS Mission; Russell, C., Angelopoulos, V., Eds.; Springer: New York, NY, USA, 2014; pp. 27–59. ISBN 978-1-4614-9554-3. [Google Scholar]
- Smith, K.E.; Colaprete, A.; Lim, D.S.S.; Andrews, D. The VIPER Mission, a Resource-Mapping Mission on Another Celestial Body; SRR XXII MEETING Colorado School of Mines: Golden, CO, USA, 2022. [Google Scholar]
- Bickel, V.T.; Moseley, B.; Hauber, E.; Shirley, M.; Williams, J.-P.; Kring, D.A. Cryogeomorphic Characterization of Shadowed Regions in the Artemis Exploration Zone. Geophys. Res. Lett. 2022, 49, e2022GL099530. [Google Scholar] [CrossRef]
- LIU Niutao, S.X. Analysis of High Resolution SAR Data and Selection of Landing Sites in the Permanently Shadowed Region on the Moon. J. Deep Space Explor. 2022, 9, 42–52. [Google Scholar] [CrossRef]
- Bussey, D.B.J.; Spudis, P.D.; Robinson, M.S. Illumination Conditions at the Lunar South Pole. Geophys. Res. Lett. 1999, 26, 1187–1190. [Google Scholar] [CrossRef]
- Trimble, J.; Carvalho, R. Lunar Prospecting: Searching for Volatiles at the South Pole. In Proceedings of the International Conference on Space Operations (SpaceOps 2016), Daejeon, Republic of Korea, 16 May 2016. [Google Scholar]
- Maimone, M.; Cheng, Y.; Matthies, L. Two Years of Visual Odometry on the Mars Exploration Rovers. J. Field Robot. 2007, 24, 169–186. [Google Scholar] [CrossRef]
- Liu, Z.; Di, K.; Peng, M.; Wan, W.; Liu, B.; Li, L.; Yu, T.; Wang, B.; Zhou, J.; Chen, H. High Precision Landing Site Mapping and Rover Localization for Chang’e-3 Mission. Sci. China Phys. Mech. Astron. 2015, 58, 1–11. [Google Scholar] [CrossRef]
- Tong, C.H.; Barfoot, T.D.; Dupuis, É. Three-Dimensional SLAM for Mapping Planetary Work Site Environments. J. Field Robot. 2012, 29, 381–412. [Google Scholar] [CrossRef]
- Hong, S.; Bangunharcana, A.; Park, J.-M.; Choi, M.; Shin, H.-S. Visual SLAM-Based Robotic Mapping Method for Planetary Construction. Sensors 2021, 21, 7715. [Google Scholar] [CrossRef] [PubMed]
- Khan, M.U.; Zaidi, S.A.A.; Ishtiaq, A.; Bukhari, S.U.R.; Samer, S.; Farman, A. A Comparative Survey of LiDAR-SLAM and LiDAR Based Sensor Technologies. In Proceedings of the 2021 Mohammad Ali Jinnah University International Conference on Computing (MAJICC), Karachi, Pakistan, 15–17 July 2021; pp. 1–8. [Google Scholar]
- Di, K.; Liu, Z.; Wan, W.; Peng, M.; Liu, B.; Wang, Y.; Gou, S.; Yue, Z. Geospatial Technologies for Chang’e-3 and Chang’e-4 Lunar Rover Missions. Geo-Spat. Inf. Sci. 2020, 23, 87–97. [Google Scholar] [CrossRef]
- Elhousni, M.; Huang, X. A Survey on 3D LiDAR Localization for Autonomous Vehicles. In Proceedings of the 2020 IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, USA, 19 October–13 November 2020; pp. 1879–1884. [Google Scholar]
- Biswas, J.; Sheridan, S.; Pitcher, C.; Richter, L.; Reganaz, M.; Barber, S.J.; Reiss, P. Searching for Potential Ice-Rich Mining Sites on the Moon with the Lunar Volatiles Scout. Planet. Space Sci. 2020, 181, 104826. [Google Scholar] [CrossRef]
- Mitrofanov, I.G.; Sanin, A.B.; Boynton, W.V.; Chin, G.; Garvin, J.B.; Golovin, D.; Evans, L.G.; Harshman, K.; Kozyrev, A.S.; Litvak, M.L.; et al. Hydrogen Mapping of the Lunar South Pole Using the LRO Neutron Detector Experiment LEND. Science 2010, 330, 483–486. [Google Scholar] [CrossRef] [PubMed]
- Li, S.; Lucey, P.G.; Milliken, R.E.; Hayne, P.O.; Fisher, E.; Williams, J.-P.; Hurley, D.M.; Elphic, R.C. Direct Evidence of Surface Exposed Water Ice in the Lunar Polar Regions. Proc. Natl. Acad. Sci. USA 2018, 115, 8907–8912. [Google Scholar] [CrossRef] [PubMed]
- Schorghofer, N.; Williams, J.-P. Mapping of Ice Storage Processes on the Moon with Time-Dependent Temperatures. Planet. Sci. J. 2020, 1, 54. [Google Scholar] [CrossRef]
- Bell, J.F.; Maki, J.N.; Alwmark, S.; Ehlmann, B.L.; Fagents, S.A.; Grotzinger, J.P.; Gupta, S.; Hayes, A.; Herkenhoff, K.E.; Horgan, B.H.N.; et al. Geological, Multispectral, and Meteorological Imaging Results from the Mars 2020 Perseverance Rover in Jezero Crater. Sci. Adv. 2022, 8, eabo4856. [Google Scholar] [CrossRef]
- Tzanetos, T.; Aung, M.; Balaram, J.; Grip, H.F.; Karras, J.T.; Canham, T.K.; Kubiak, G.; Anderson, J.; Merewether, G.; Starch, M.; et al. Ingenuity Mars Helicopter: From Technology Demonstration to Extraterrestrial Scout. In Proceedings of the 2022 IEEE Aerospace Conference (AERO), Big Sky, MT, USA, 5–12 March 2022; pp. 1–19. [Google Scholar]
- Wu, B.; Dong, J.; Wang, Y.; Rao, W.; Sun, Z.; Li, Z.; Tan, Z.; Chen, Z.; Wang, C.; Liu, W.C.; et al. Landing Site Selection and Characterization of Tianwen-1 (Zhurong Rover) on Mars. J. Geophys. Res. Planets 2022, 127, e2021JE007137. [Google Scholar] [CrossRef]
- Kereszturi, A. Geologic Field Work on Mars: Distance and Time Issues during Surface Exploration. Acta Astronaut. 2011, 68, 1686–1701. [Google Scholar] [CrossRef]
- Golombek, M.; Huertas, A.; Kipp, D.; Calef, F. Detection and Characterization of Rocks and Rock Size-Frequency Distributions at the Final Four Mars Science Laboratory Landing Sites. Int. J. Mars Sci. Explor. 2012, 7, 1–22. [Google Scholar] [CrossRef]
- Jiang, Z.; Zhu, J.; Lin, Z.; Li, Z.; Guo, R. 3D Mapping of Outdoor Environments by Scan Matching and Motion Averaging. Neurocomputing 2020, 372, 17–32. [Google Scholar] [CrossRef]
- Smith, D.E.; Zuber, M.T.; Neumann, G.A.; Mazarico, E.; Lemoine, F.G.; Head III, J.W.; Lucey, P.G.; Aharonson, O.; Robinson, M.S.; Sun, X.; et al. Summary of the Results from the Lunar Orbiter Laser Altimeter after Seven Years in Lunar Orbit. Icarus 2017, 283, 70–91. [Google Scholar] [CrossRef]
- Allan, M.; Wong, U.; Furlong, P.M.; Rogg, A.; McMichael, S.; Welsh, T.; Chen, I.; Peters, S.; Gerkey, B.; Quigley, M.; et al. Planetary Rover Simulation for Lunar Exploration Missions. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019; pp. 1–19. [Google Scholar]
- Mazarico, E.; Neumann, G.A.; Smith, D.E.; Zuber, M.T.; Torrence, M.H. Illumination Conditions of the Lunar Polar Regions Using LOLA Topography. Icarus 2011, 211, 1066–1081. [Google Scholar] [CrossRef]
- Yue, Z.; Shi, K.; Di, K.; Lin, Y.; Gou, S. Progresses and Prospects of Impact Crater Studies. Sci. China Earth Sci. 2022, 66, 2441–2451. [Google Scholar] [CrossRef]
- Jiang, M.; Dai, Y.; Cui, L.; Xi, B. Soil Mechanics–Based Testbed Setup for Lunar Rover Wheel and Corresponding Experimental Investigations. J. Aerosp. Eng. 2017, 30, 06017005. [Google Scholar] [CrossRef]
- Müller, M.G.; Durner, M.; Gawel, A.; Stürzl, W.; Triebel, R.; Siegwart, R. A Photorealistic Terrain Simulation Pipeline for Unstructured Outdoor Environments. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September 2021; pp. 9765–9772. [Google Scholar]
- Rothrock, B.; Kennedy, R.; Cunningham, C.; Papon, J.; Heverly, M.; Ono, M. SPOC: Deep Learning-Based Terrain Classification for Mars Rover Missions. In Proceedings of the AIAA SPACE 2016, Long Beach, CA, USA, 13–16 September 2016. [Google Scholar]
- Reitmann, S.; Neumann, L.; Jung, B. BLAINDER—A Blender AI Add-On for Generation of Semantically Labeled Depth-Sensing Data. Sensors 2021, 21, 2144. [Google Scholar] [CrossRef]
- Hao, S.; Zhou, Y.; Guo, Y. A Brief Survey on Semantic Segmentation with Deep Learning. Neurocomputing 2020, 406, 302–321. [Google Scholar] [CrossRef]
- Kazhdan, M.; Bolitho, M.; Hoppe, H. Poisson Surface Reconstruction. In Proceedings of the Fourth Eurographics Symposium on Geometry Processing, Cagliari, Italy, 26 June 2006; Eurographics Association: Goslar, Germany, 2006; pp. 61–70. [Google Scholar]
- Gan, H.; Zhao, C.; Wei, G.; Li, X.; Xia, G.; Zhang, X.; Shi, J. Numerical Simulation of the Lunar Polar Environment: Implications for Rover Exploration Challenge. Aerospace 2023, 10, 598. [Google Scholar] [CrossRef]
- Maule, J.; Skelton, A.E.; Franklin, A. The Development of Color Perception and Cognition. Annu. Rev. Psychol. 2023, 74, 87–111. [Google Scholar] [CrossRef] [PubMed]
- Canny, J. A Computational Approach to Edge Detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, PAMI-8, 679–698. [Google Scholar] [CrossRef]
- Suzuki, S.; Be, K. Topological Structural Analysis of Digitized Binary Images by Border Following. Comput. Vis. Graph. Image Process. 1985, 30, 32–46. [Google Scholar] [CrossRef]
- Yu, X.; Wang, P.; Zhang, Z. Learning-Based End-to-End Path Planning for Lunar Rovers with Safety Constraints. Sensors 2021, 21, 796. [Google Scholar] [CrossRef] [PubMed]
- Cerda-Company, X.; Otazu, X.; Sallent, N.; Parraga, C.A. The Effect of Luminance Differences on Color Assimilation. J. Vis. 2018, 18, 10. [Google Scholar] [CrossRef]
- Sullivan, R.; Arvidson, R.; Bell III, J.F.; Gellert, R.; Golombek, M.; Greeley, R.; Herkenhoff, K.; Johnson, J.; Thompson, S.; Whelley, P.; et al. Wind-Driven Particle Mobility on Mars: Insights from Mars Exploration Rover Observations at “El Dorado” and Surroundings at Gusev Crater. J. Geophys. Res. Planets 2008, 113. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Advantage | Drawback | Missions |
|---|---|---|---|
| Stereo camera | Sufficient information in a single frame to fully perceive the surrounding terrain [5,6] | Difficult to work in the shadowed region of the Moon | Most missions, e.g., Yutu, Perseverance, Zhurong |
| LiDAR | Works well in the shadowed region of the Moon [14] | High power consumption and large computational workload | Not utilized yet |
| Infrared camera | Multiple bands to sense terrain and material composition around the rover [5,8] | Difficult to work in the lunar shadowed region | Many missions, e.g., Yutu, Zhurong |
| Light source & Stereo camera | Works well in the lunar shadowed region [24] | Close sensing distance | VIPER |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bi, J.; Jin, A.; Chen, C.; Ying, S. Enhanced Interactive Rendering for Rovers of Lunar Polar Region and Martian Surface. Remote Sens. 2024, 16, 1270. https://doi.org/10.3390/rs16071270
Bi J, Jin A, Chen C, Ying S. Enhanced Interactive Rendering for Rovers of Lunar Polar Region and Martian Surface. Remote Sensing. 2024; 16(7):1270. https://doi.org/10.3390/rs16071270
Chicago/Turabian StyleBi, Jiehao, Ang Jin, Chi Chen, and Shen Ying. 2024. "Enhanced Interactive Rendering for Rovers of Lunar Polar Region and Martian Surface" Remote Sensing 16, no. 7: 1270. https://doi.org/10.3390/rs16071270
APA StyleBi, J., Jin, A., Chen, C., & Ying, S. (2024). Enhanced Interactive Rendering for Rovers of Lunar Polar Region and Martian Surface. Remote Sensing, 16(7), 1270. https://doi.org/10.3390/rs16071270