


Analytical Coherent Detection in High-Resolution Dual-Polarimetric Sea Clutter with Independent Inverse Gamma Textures


Abstract
1. Introduction
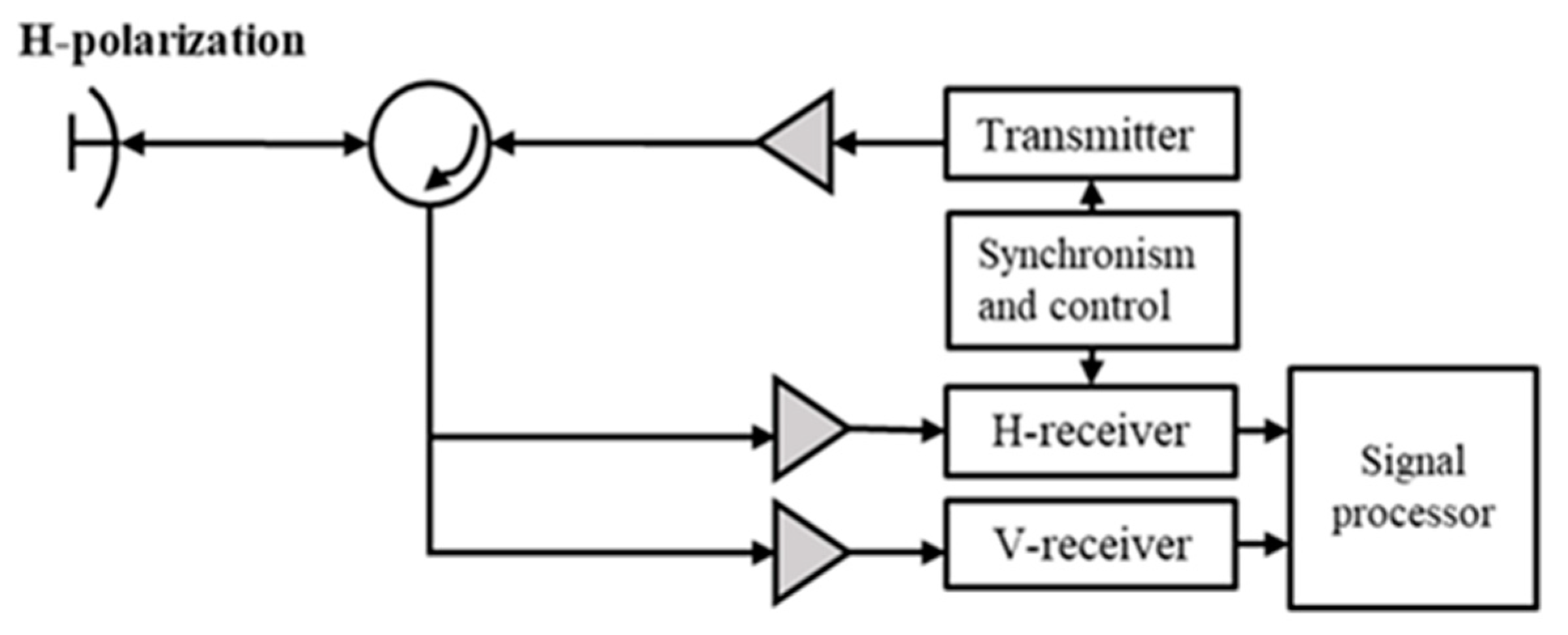
2. Problem Description of Dual-Polarimetric Coherent Target Detection in Sea Clutter
3. Near-Optimum Coherent Detector in Dual-Polarimetric SIRV Clutter with Independent Inverse Gamma Textures
3.1. Dual-Polarimetric Near-Optimum Coherent Detector
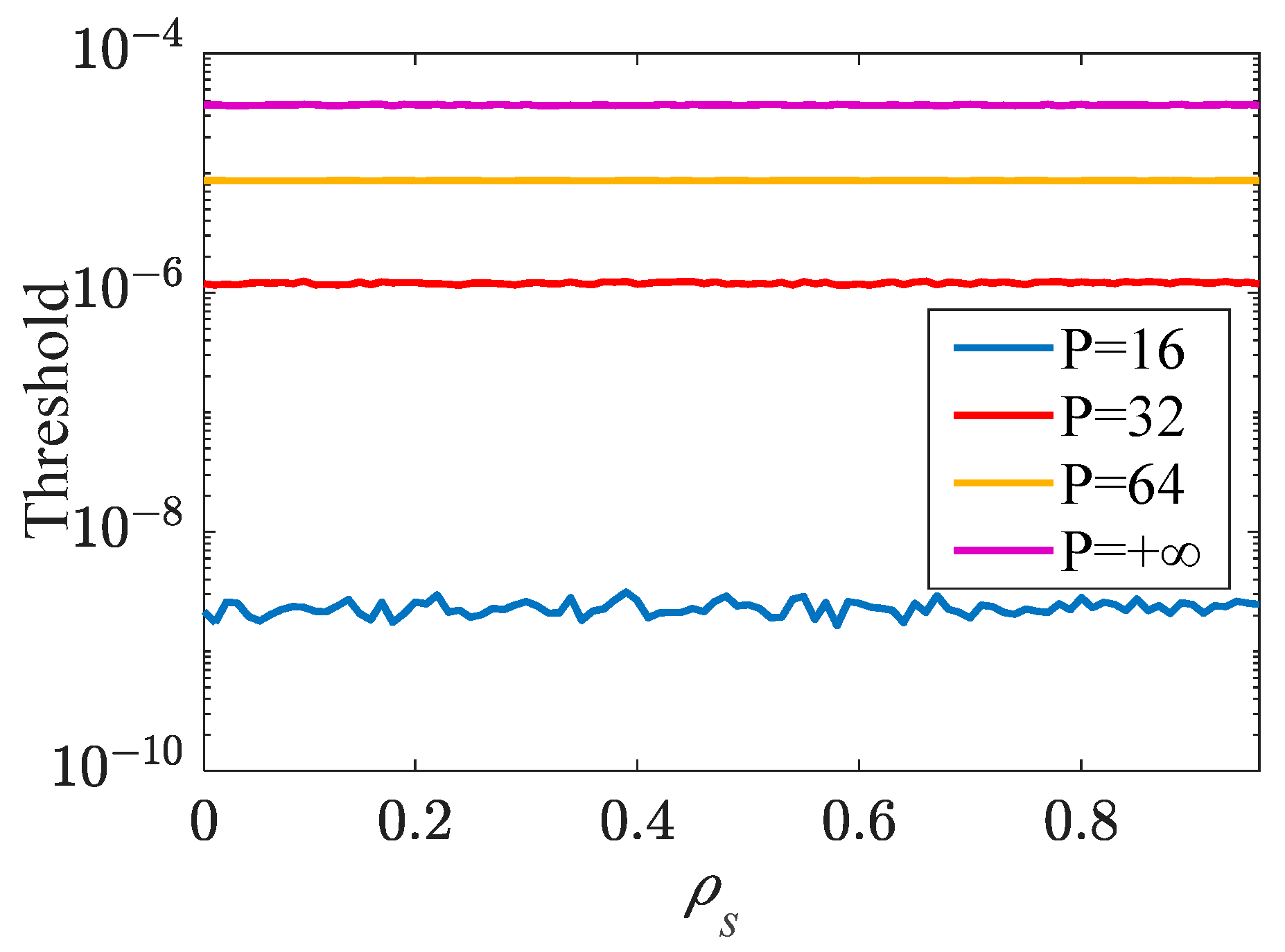
3.2. CFAR Property and Threshold of P-GLRT-LTD
3.3. Adaptive P-GLRT-LTD and Approximate CFAR Property
4. Experimental Results and Performance Comparison
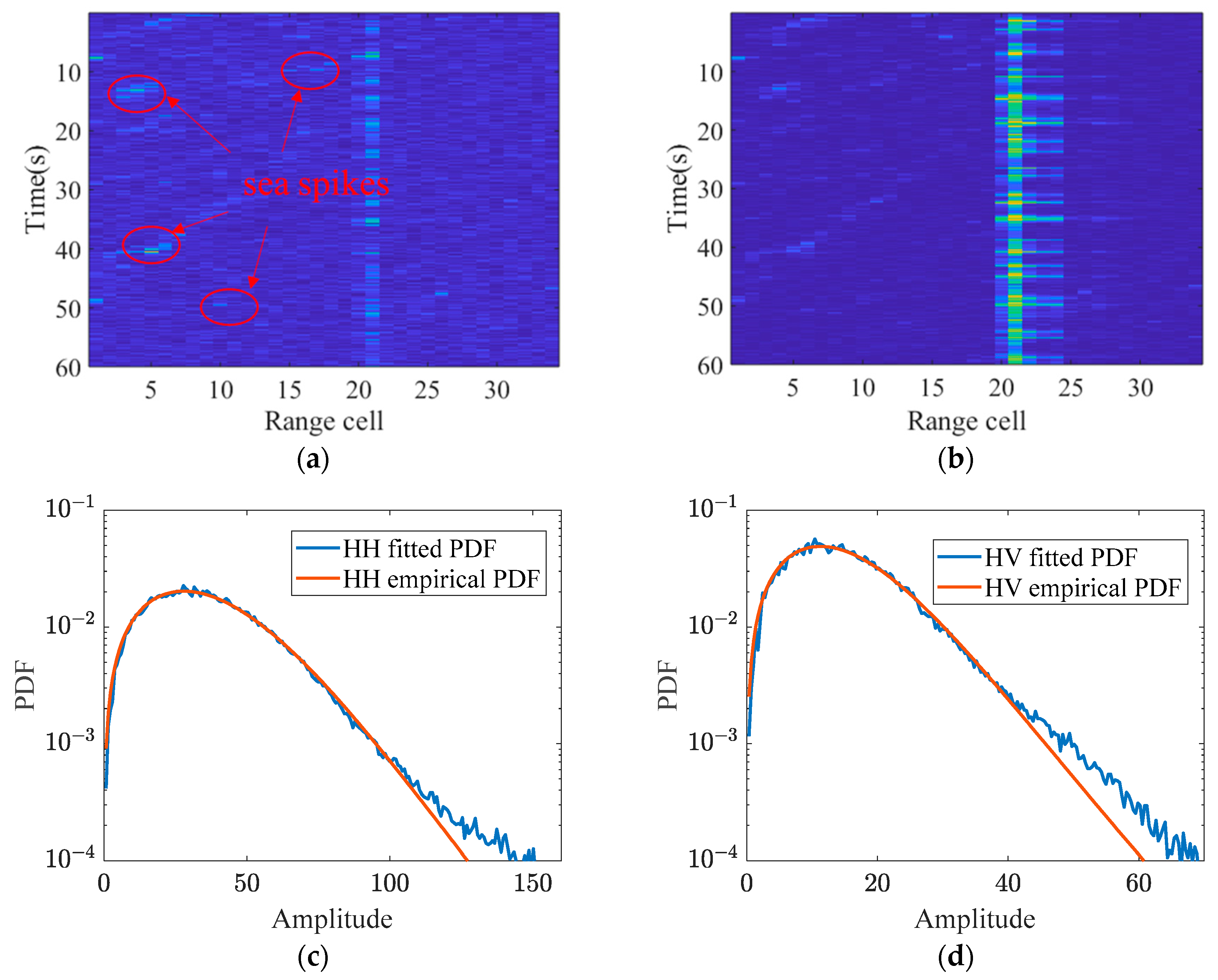
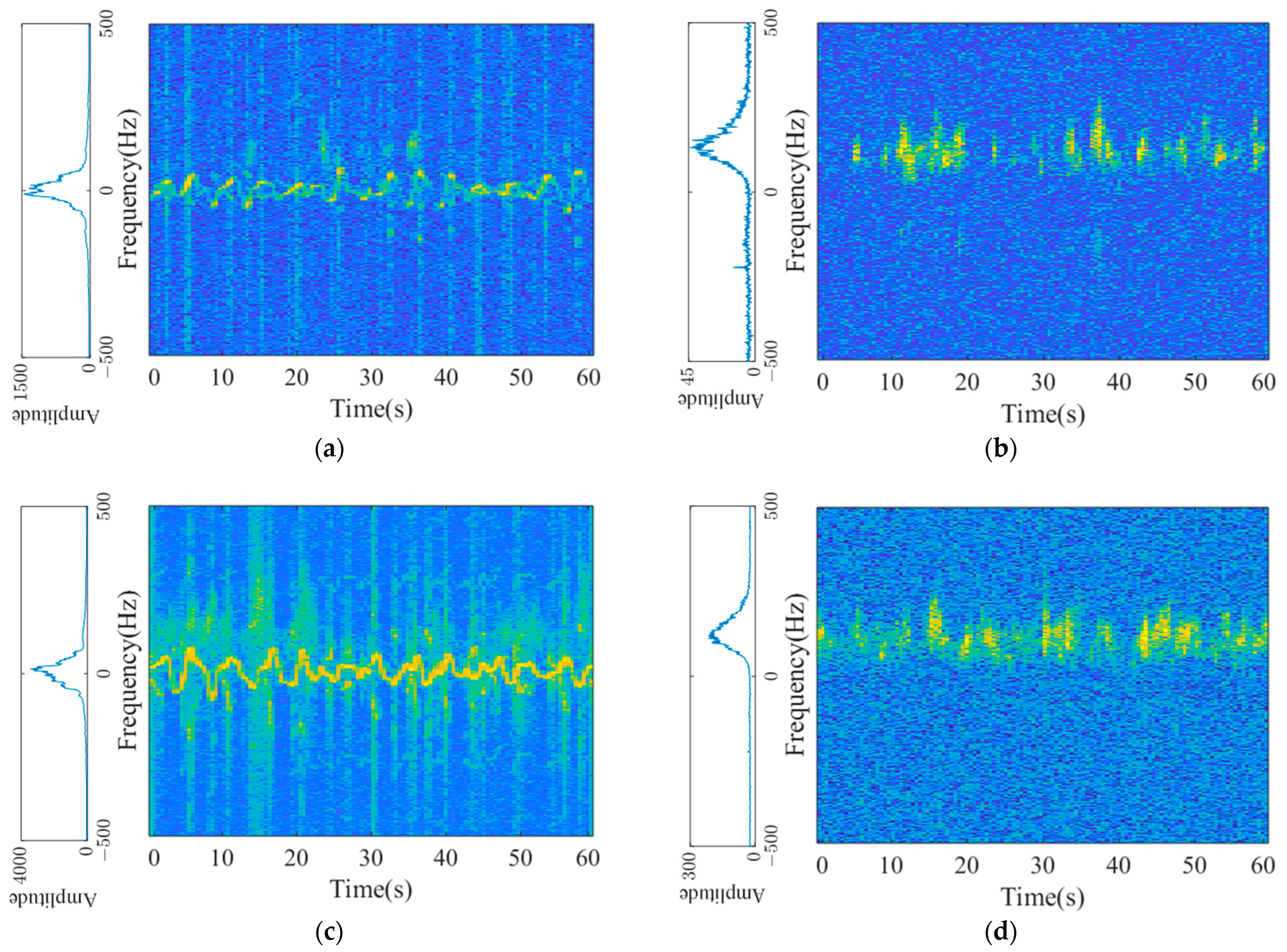
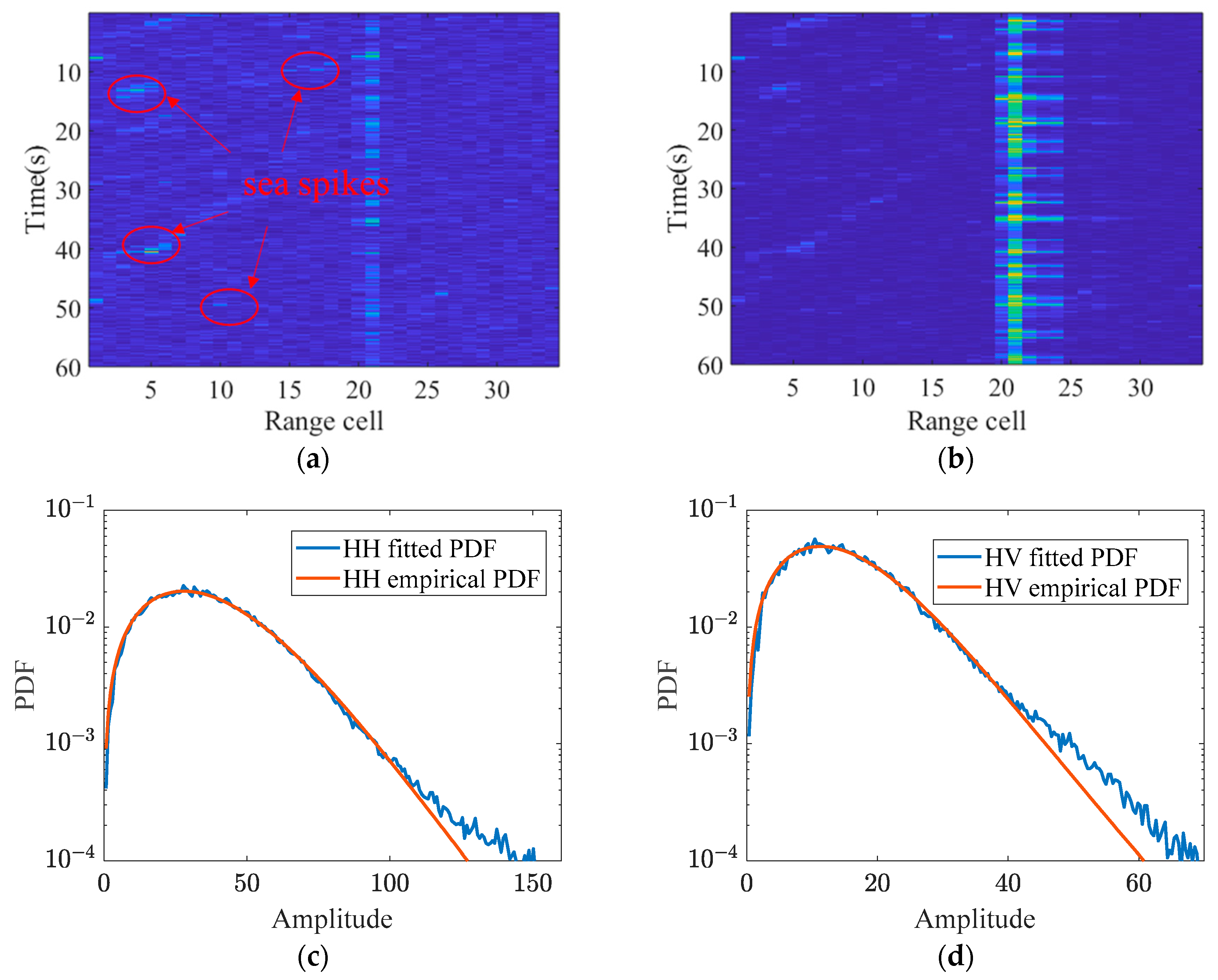
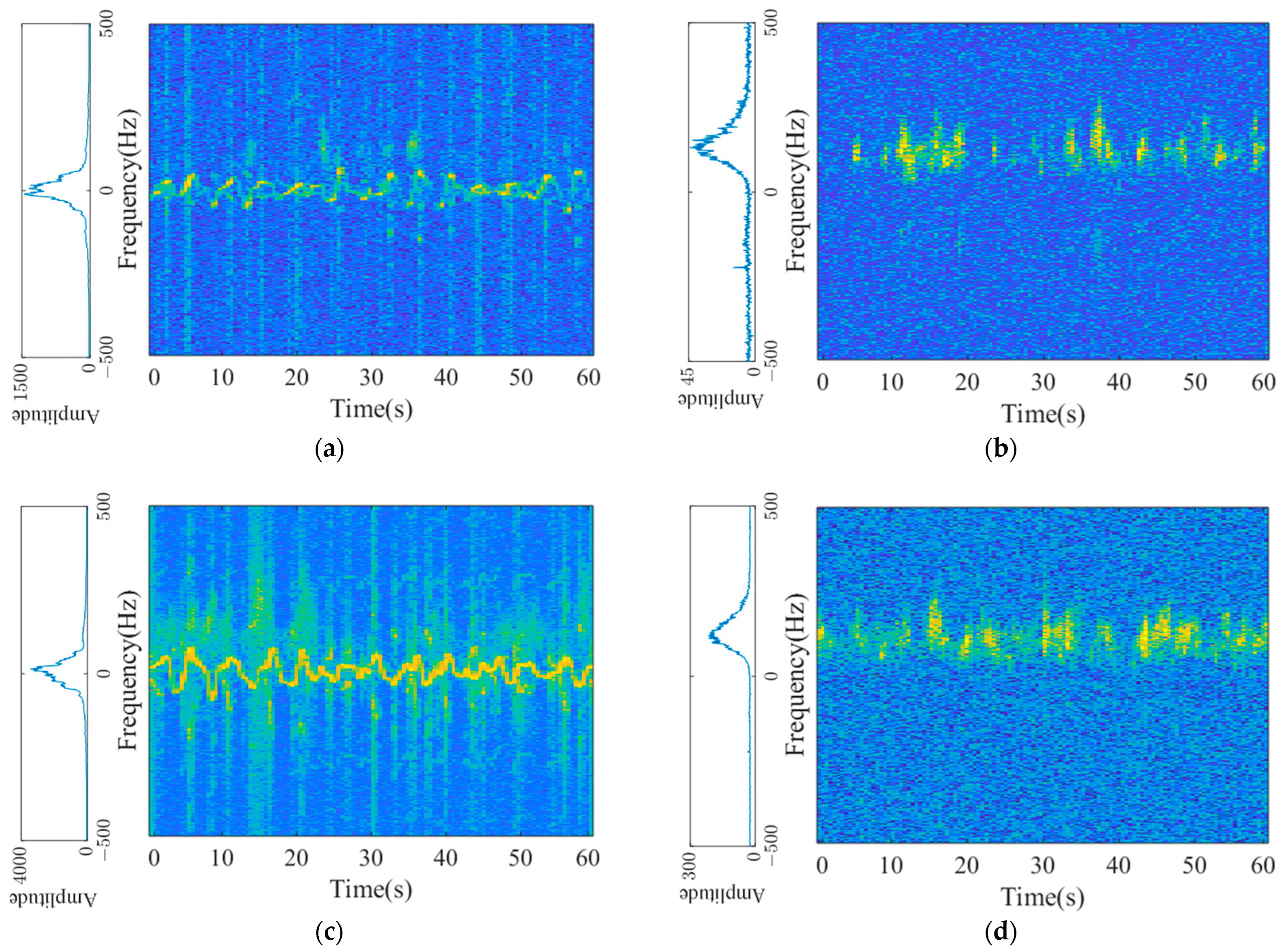
4.1. Characteristics Analysis of Dual-Polarimetric Data
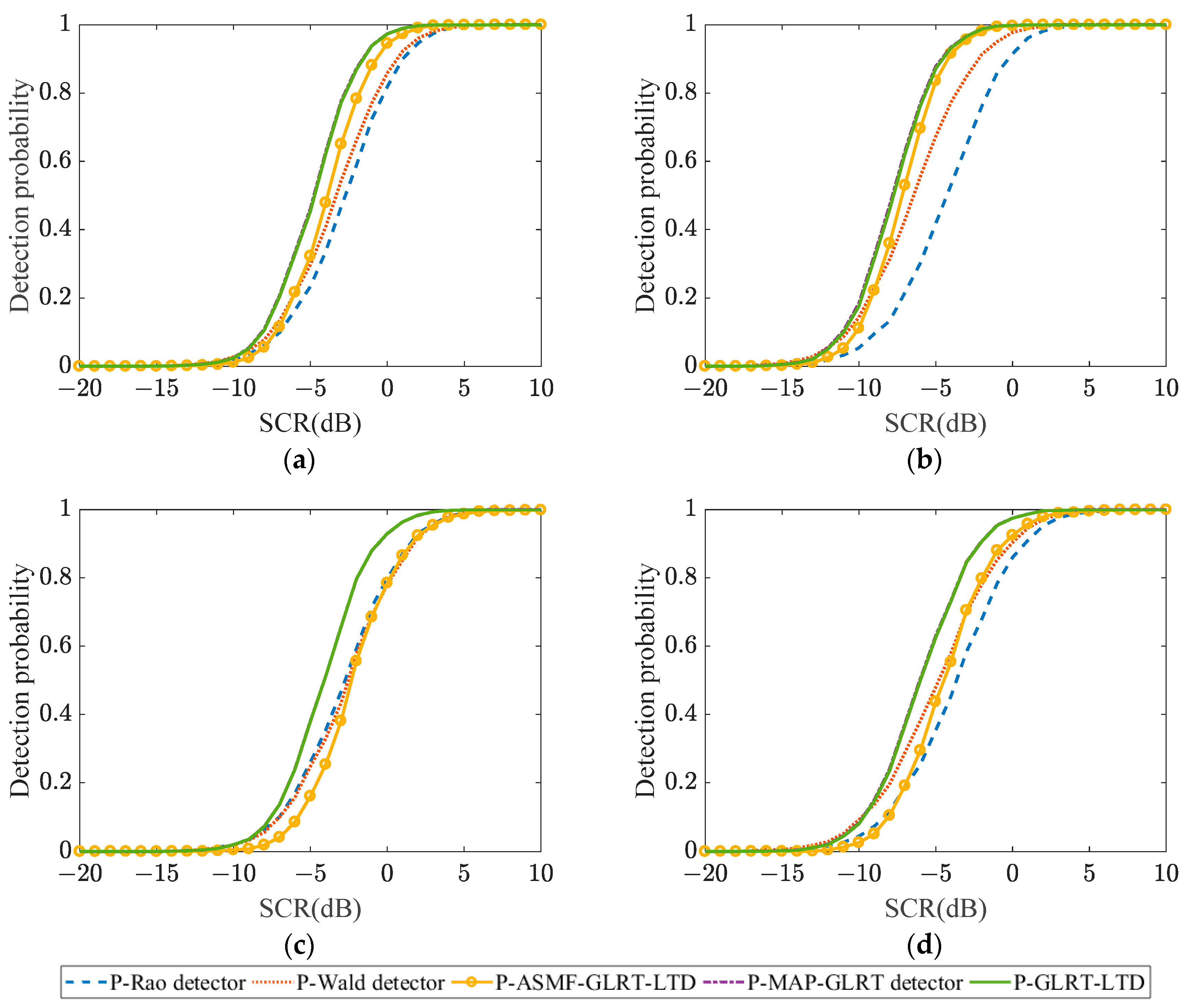
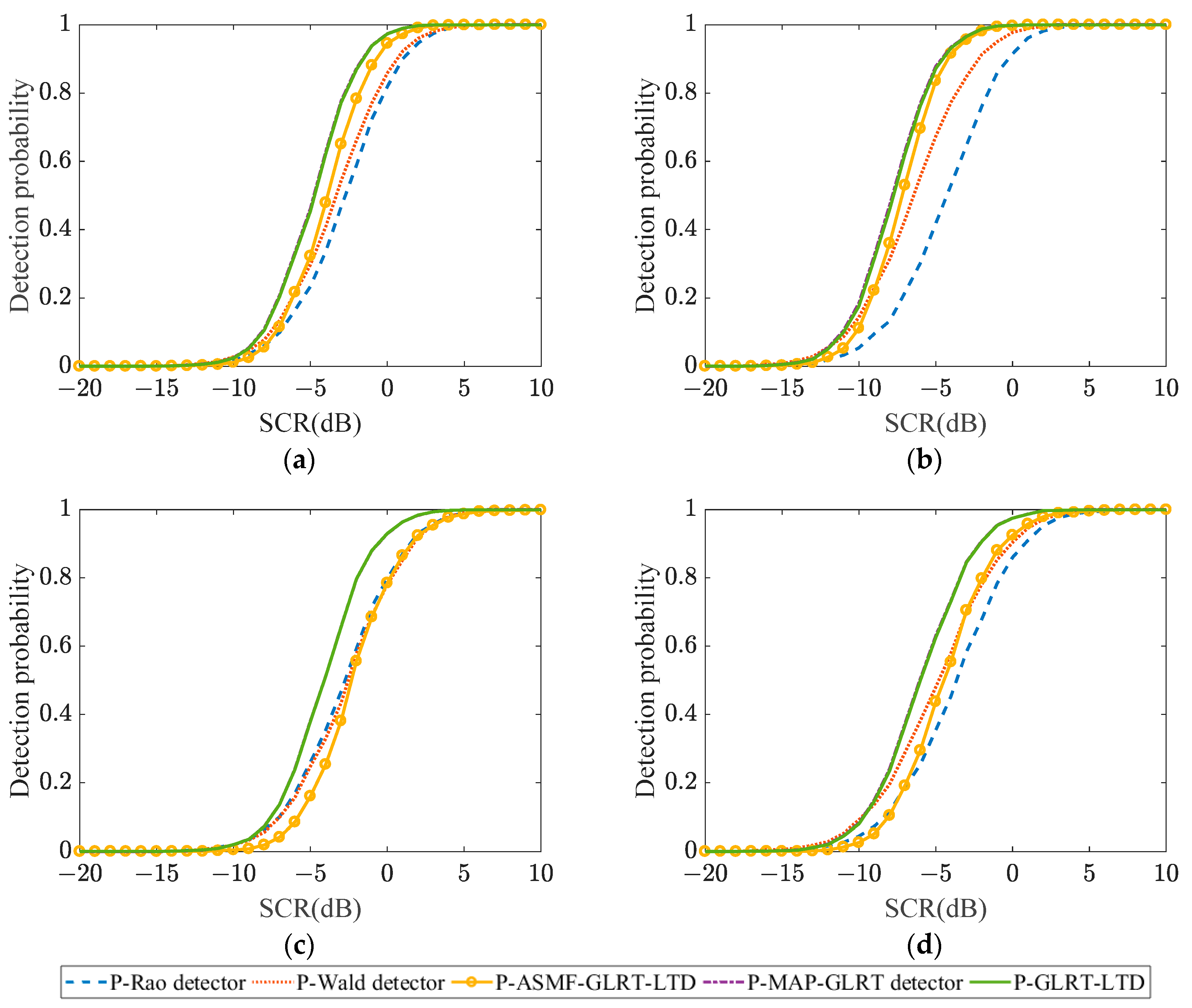
4.2. Performance Evaluation Using Simulated Data
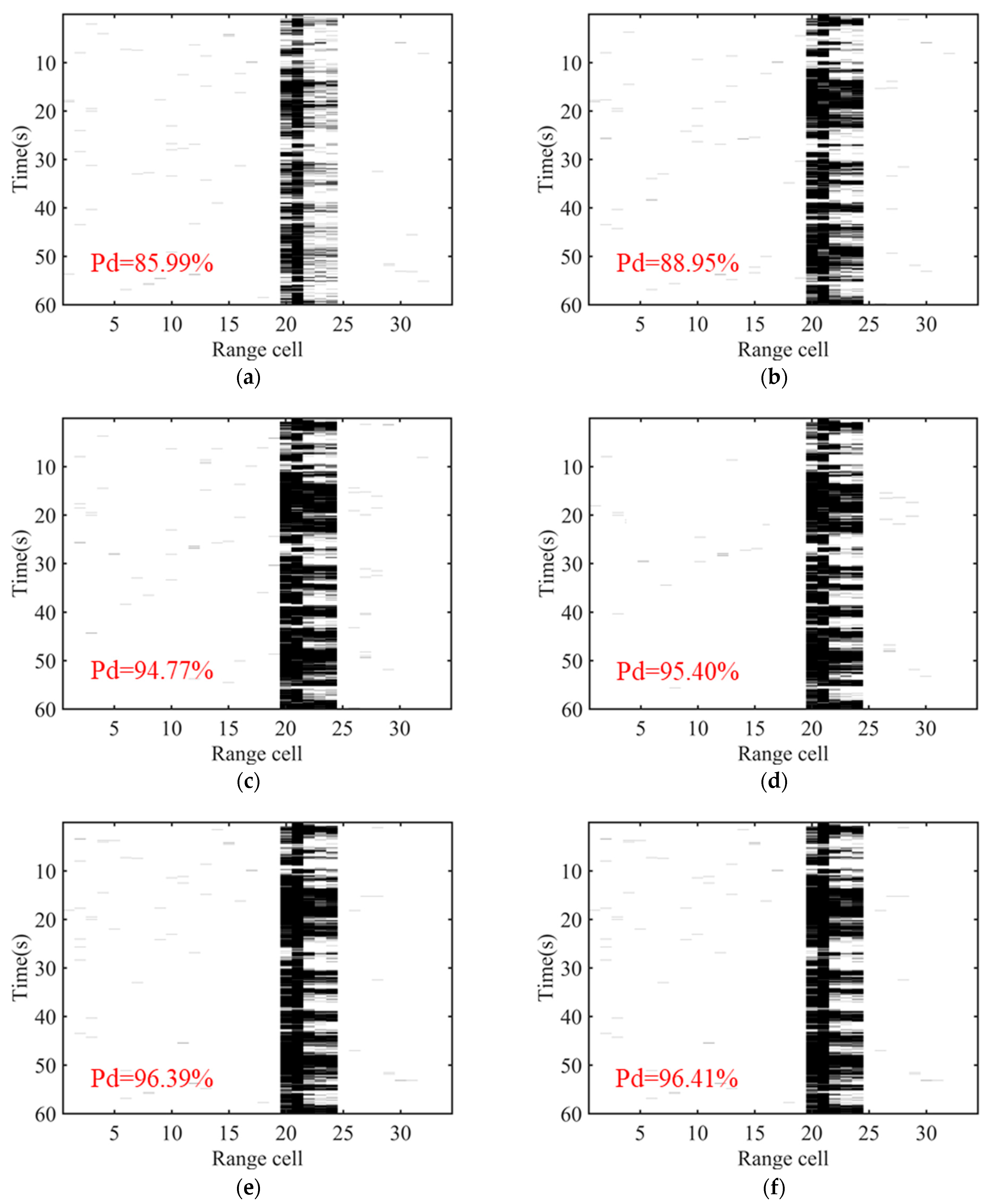
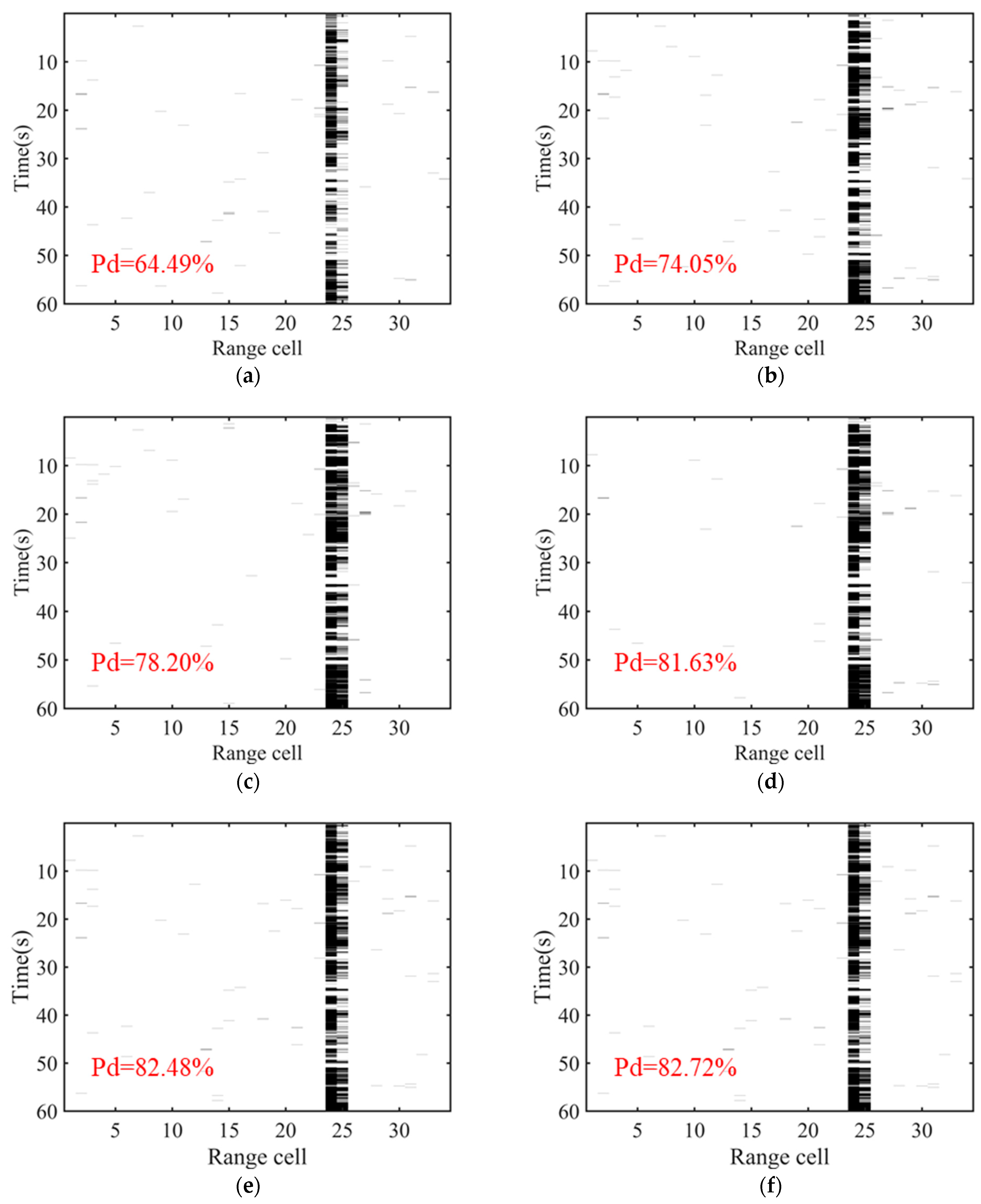
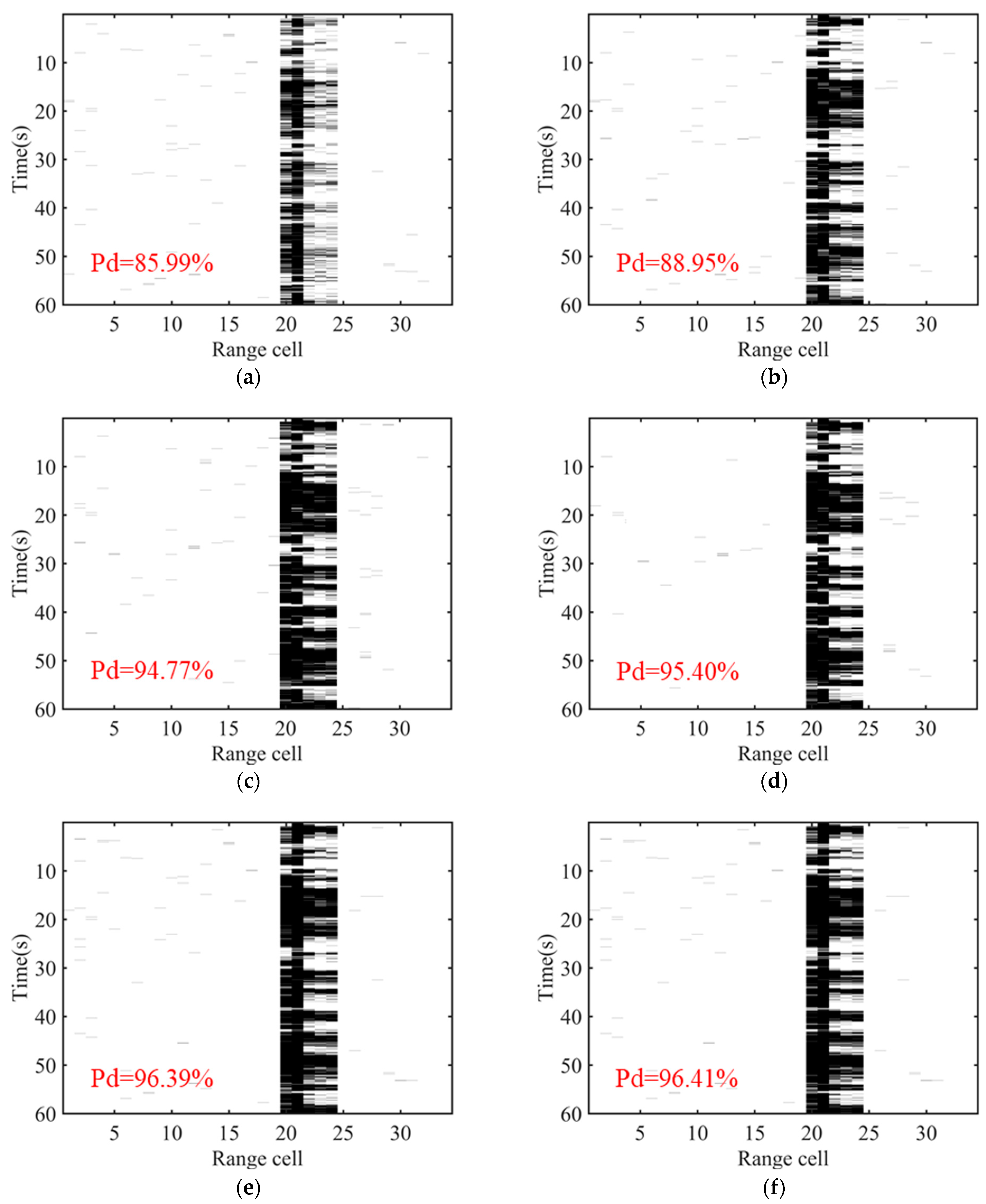
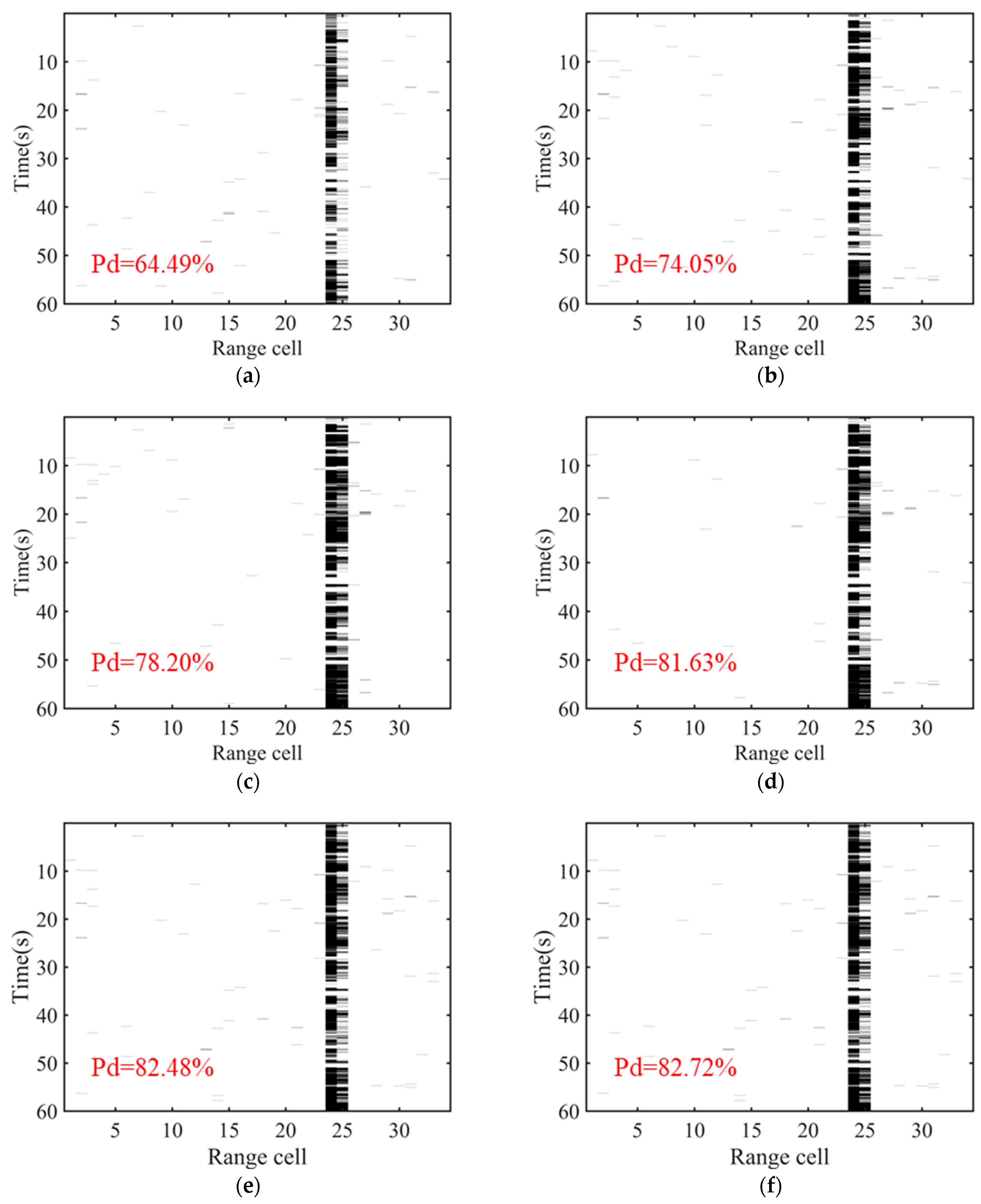
4.3. Performance Comparison Using Measured Data
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Giuli, D. Polarization diversity in radars. Proc. IEEE 1986, 74, 245–269. [Google Scholar] [CrossRef]
- Novak, L.M.; Sechtin, M.B.; Cardullo, M.J. Studies of target detection algorithms of radar targets. Signal Process. 1995, 41, 153–164. [Google Scholar]
- Park, H.; Li, J.; Wang, H. Polarization-space-time domain generalized likelihood ratio detection algorithms that use polarimetric radar data. IEEE Trans. Aerosp. Electron. Syst. 1989, 25, 150–165. [Google Scholar]
- De Maio, A.; Ricci, G. A polarimetric adaptive matched filter. Signal Process 2001, 81, 2583–2589. [Google Scholar] [CrossRef]
- Lombardo, P.; Pastina, D.; Bucciarelli, T. Adaptive polarimetric target detection with coherent radar PART I: Detection against Gaussian background. IEEE Trans. Aerosp. Electron. Syst. 2001, 37, 1194–1206. [Google Scholar] [CrossRef]
- Lombardo, P.; Pastina, D.; Bucciarelli, T. Adaptive polarimetric target detection with coherent radar PART II: Detection against non-Gaussian background. IEEE Trans. Aerosp. Electron. Syst. 2001, 37, 1207–1220. [Google Scholar] [CrossRef]
- De Maio, A.; Alfano, G.; Conte, E. Polarization diversity detection in compound-gaussian clutter. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 114–131. [Google Scholar] [CrossRef]
- Haykin, S.; Krasnor, C.; Nohara, T.J.; Currie, B.W.; Hamburger, D. A coherent dual-polarimetric radar for studying the ocean environment. IEEE Trans. Geosci. Remote Sens. 1991, 29, 189–191. [Google Scholar] [CrossRef]
- Hershberger, J.; Pratt, T.; Kossler, R. Implementa-tions of coherent software-defined dual-polarimetric radars. IEEE Trans. Microw. Theory Tech. 2017, 65, 1673–1681. [Google Scholar] [CrossRef]
- Ward, K.D.; Tough, R.J.; Watts, S. Sea Clutter: Scattering, the K Distribution and Radar Performance, 2nd ed.; Institute of Engineering Technology: London, UK, 2013; pp. 31–103. [Google Scholar]
- Melief, H.; Greidanus, H.; van Genderen, P.; Hoogeboom, P. Analysis of sea spikes in radar sea clutter data. IEEE Trans. Geosci. Remote Sens. 2006, 44, 985–993. [Google Scholar] [CrossRef]
- Ousborne, J.J.; Griffith, D.; Yuan, R.W. A periscope detection radar. Johns Hopkins APL Tech. Dig. 1997, 19, 125–133. [Google Scholar]
- Jin, B.; Ma, Y.; Wu, G. Fast scan-to-scan integration algorithm for small target in sea clutter. Electron. Lett. 2017, 53, 1070–1071. [Google Scholar] [CrossRef]
- Shi, S.-N.; Liang, X.; Shui, P.-L.; Zhang, J.-K.; Zhang, S. Low-Velocity Small Target Detection with Doppler-Guided Retrospective Filter in High-Resolution Radar at Fast Scan Mode. IEEE Trans. Geosci. Remote Sens. 2019, 57, 8937–8953. [Google Scholar] [CrossRef]
- Wang, Y.; Xia, W.; He, Z.; Li, H.; Petropulu, A.P. Polarimetric Detection in Compound Gaussian Clutter with Kronecker Structured Covariance Matrix. IEEE Trans. Signal Process. 2017, 65, 4562–4576. [Google Scholar] [CrossRef]
- Sangston, K.J.; Gini, F.; Greco, M.S. Coherent Radar Target Detection in Heavy-Tailed Compound-Gaussian Clutter. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 64–77. [Google Scholar] [CrossRef]
- Wang, Z.; He, Z.; He, Q.; Xiong, B.; Cheng, Z. Persymmetric Adaptive Target Detection with Dual-Polarization in Compound Gaussian Sea Clutter with Inverse Gamma Texture. IEEE Trans. Geosci. Remote. Sens. 2022, 60, 5118117. [Google Scholar] [CrossRef]
- Available online: http://soma.McMaster.ca/ipix (accessed on 3 April 2023).
- Watts, S. Modeling and Simulation of Coherent Sea Clutter. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 3303–3317. [Google Scholar] [CrossRef]
- Watts, S. The effects of covariance matrix mismatch on adaptive CFAR performance. In Proceedings of the 2013 International Conference on Radar, Adelaide, SA, Australia, 9–12 September 2013; pp. 324–329. [Google Scholar]
- Watts, S. Modelling of coherent detectors in sea clutter. In Proceedings of the 2015 IEEE International Radar Conference (RadarCon), Arlington, VA, USA, 10–15 May 2015; pp. 105–110. [Google Scholar]
- Greco, M.; Bordoni, F.; Gini, F. X-Band Sea-Clutter Nonstationarity: Influence of Long Waves. IEEE J. Ocean. Eng. 2004, 29, 269–283. [Google Scholar] [CrossRef]
- Ding, H.; Guan, J.; Liu, N.; Wang, G. New Spatial Correlation Models for Sea Clutter. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1833–1837. [Google Scholar] [CrossRef]
- Liang, X.; Shui, P.-L.; Su, H.-T. Bi-Phase Compound-Gaussian Mixture Model of Sea Clutter and Scene-Segmentation-Based Target Detection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 4661–4674. [Google Scholar] [CrossRef]
- Sangston, K.; Gini, F.; Greco, M.; Farina, A. Structures for radar detection in compound Gaussian clutter. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 445–458. [Google Scholar] [CrossRef]
- Shui, P.-L.; Liu, M.; Xu, S.-W. Shape-parameter-dependent coherent radar target detection in K-distributed clutter. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 451–465. [Google Scholar] [CrossRef]
- Shi, S.-N.; Shui, P.-L. Optimum coherent detection in homogenous K-distributed clutter. IET Radar Sonar Navig. 2016, 10, 1477–1484. [Google Scholar] [CrossRef]
- Gini, F.; Michels, J.H. Performance analysis of two covariance matrix estimators in compound-Gaussian clutter. Iee Proc. Radar Sonar Navig. 1999, 146, 133–140. [Google Scholar] [CrossRef]
- Gini, F.; Greco, M. Covariance matrix estimation for CFAR detection in correlated heavy tailed clutter. Signal Process. 2002, 82, 1847–1859. [Google Scholar] [CrossRef]
- Pascal, F.; Chitour, Y.; Ovarlez, J.-P.; Forster, P.; Larzabal, P. Covariance Structure Maximum-Likelihood Estimates in Compound Gaussian Noise: Existence and Algorithm Analysis. IEEE Trans. Signal Process. 2007, 56, 34–48. [Google Scholar] [CrossRef]
- Ollia, E.; Tyler, D.E.; Koivunen, V.; Poor, H.V. Complex elliptically symmetric distributions: Survey, new results and applications. IEEE Trans. Signal Process. 2012, 60, 5597–5625. [Google Scholar] [CrossRef]
- Greco, M.; Stinco, P.; Gini, F.; Rangaswamy, M. Impact of sea clutter nonstationarity on distribution covariance matrix estimation and CFAR detector performance. IEEE Trans. Aerosp. Electron. Syst 2010, 46, 1502–1513. [Google Scholar] [CrossRef]
- Greco, M.; Gini, F. Cramér-Rao Lower Bounds on Covariance Matrix Estimation for Complex Elliptically Symmetric Distributions. IEEE Trans. Signal Process. 2013, 61, 6401–6409. [Google Scholar] [CrossRef]
- Greco, M.; Stinco, P.; Gini, F. Identification and analysis of sea radar clutter spikes. IET Radar Sonar Navig. 2010, 4, 239–250. [Google Scholar] [CrossRef]
- Shui, P.-L.; Zou, P.-J.; Feng, T. Outlier-robust truncated maximum likelihood parameter estimators of generalized Pareto distributions. Digit. Signal Process. 2022, 127, 103527. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | 19980223_184853 | 19980223_190106 |
|---|---|---|
| Resolution | 3 m | 9 m |
| PRF | 1000 Hz | 1000 Hz |
| vHH | 8.8 | 4.3 |
| vHV | 3.5 | 1.9 |
| bHH | 1.887 × 103 | 2.366 × 104 |
| bHV | 4.598 × 102 | 1.045 × 104 |
| ρ | 0.76 | 0.82 |
| SCRHH | 3.2 dB | 4.2 dB |
| SCRHV | 16.7 dB | 18.1 dB |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duan, T.; Shui, P.; Wang, J.; Xu, S. Analytical Coherent Detection in High-Resolution Dual-Polarimetric Sea Clutter with Independent Inverse Gamma Textures. Remote Sens. 2024, 16, 1315. https://doi.org/10.3390/rs16081315
Duan T, Shui P, Wang J, Xu S. Analytical Coherent Detection in High-Resolution Dual-Polarimetric Sea Clutter with Independent Inverse Gamma Textures. Remote Sensing. 2024; 16(8):1315. https://doi.org/10.3390/rs16081315
Chicago/Turabian StyleDuan, Tingyu, Penglang Shui, Jianming Wang, and Shuwen Xu. 2024. "Analytical Coherent Detection in High-Resolution Dual-Polarimetric Sea Clutter with Independent Inverse Gamma Textures" Remote Sensing 16, no. 8: 1315. https://doi.org/10.3390/rs16081315
APA StyleDuan, T., Shui, P., Wang, J., & Xu, S. (2024). Analytical Coherent Detection in High-Resolution Dual-Polarimetric Sea Clutter with Independent Inverse Gamma Textures. Remote Sensing, 16(8), 1315. https://doi.org/10.3390/rs16081315