



Advancements in Remote Sensing Imagery Applications for Precision Management in Olive Growing: A Systematic Review



Abstract
:1. Introduction
2. Materials and Methods
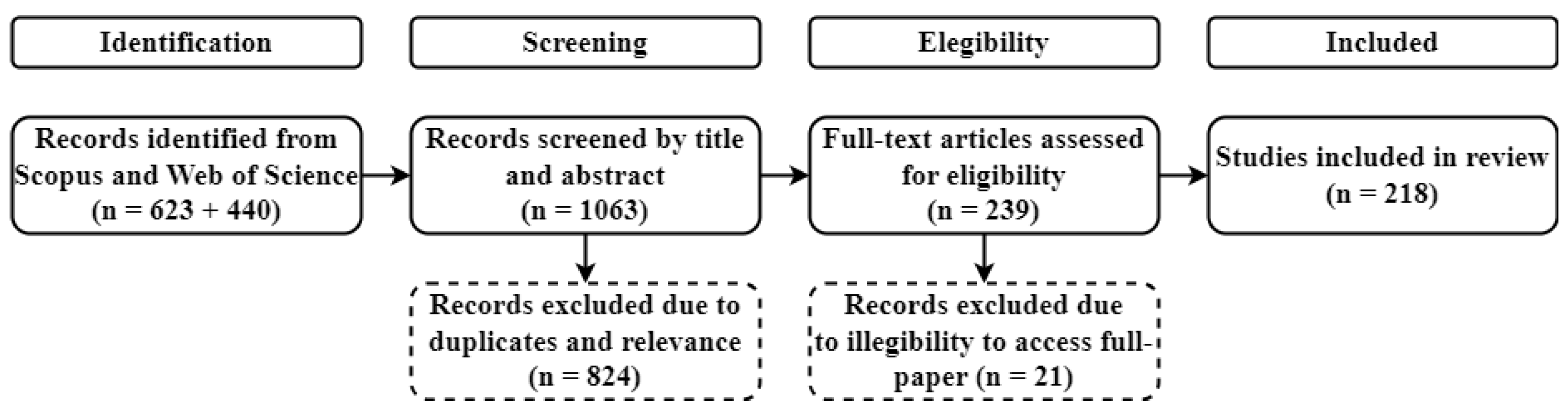
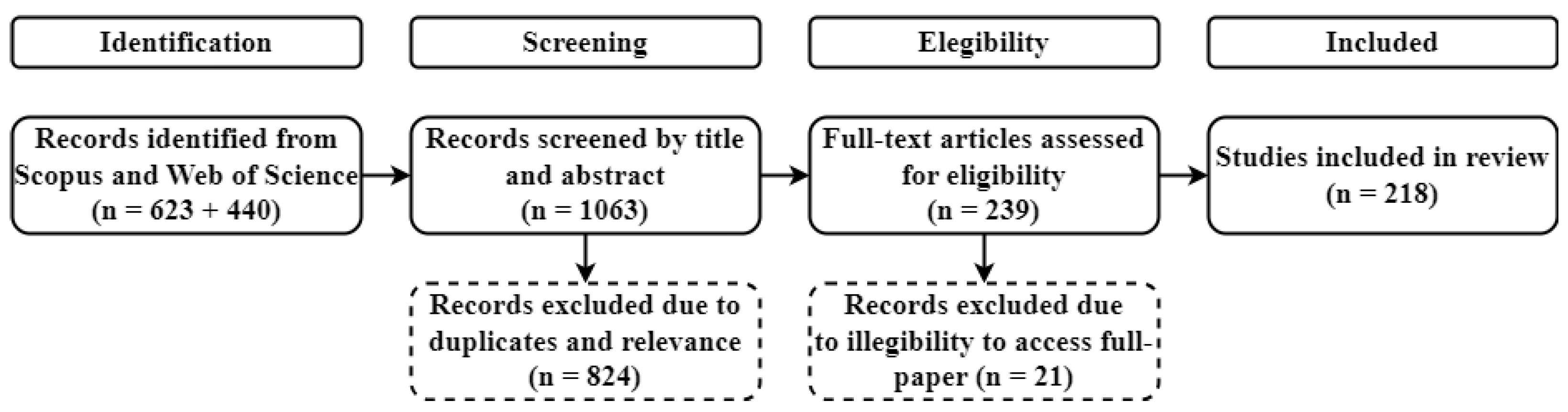
2.1. Literature Review Process
2.2. Result Filtering
2.3. Study Classification and Analysis
3. Overview of Remote Sensing Platforms, Sensors and Image Processing Techniques
3.1. Platforms
3.1.1. Satellites
3.1.2. Aircraft
3.1.3. Unmanned Aerial Vehicles
3.1.4. Terrestrial
3.1.5. Summary
3.2. Imaging Sensors
- Deployment platform: ground-based (e.g., terrestrial laser scanner), airborne (e.g., aircraft and UAVs) or spaceborne (e.g., satellites), significantly influencing data acquisition, considering orbit geometry, flight height and sensor compatibility.
- Wavelength spectrum: sensors operate across diverse wavelengths, including optical, infrared, thermal and microwave. This spectrum choice determines the type of information captured, impacting the utility of the data.
- Spatial Resolution: maintaining a balance between high and low spatial resolution is crucial, influencing the level of detail in the acquired data.
- Sensor type: choosing between narrow-band sensors (e.g., HSP) or broad-band sensors (mono and MSP) affects the sensor’s ability to discriminate specific spectral features.
- Radiometric resolution: this feature delineates a sensor’s capacity to differentiate between radiation levels, directly influencing the accuracy of the captured data.
3.2.1. Visible Light Sensors
3.2.2. Infrared Sensors
3.2.3. LiDAR Sensors
3.2.4. Summary
3.3. Data Type and Image Processing Techniques
4. Results
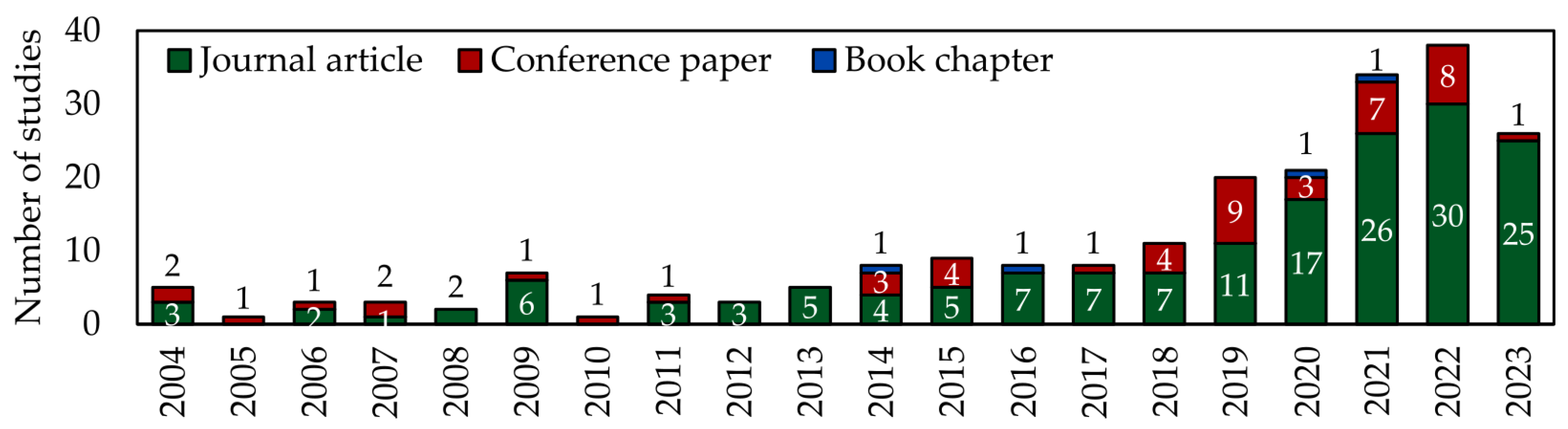
4.1. Overview of Annual Distribution of the Research Studies
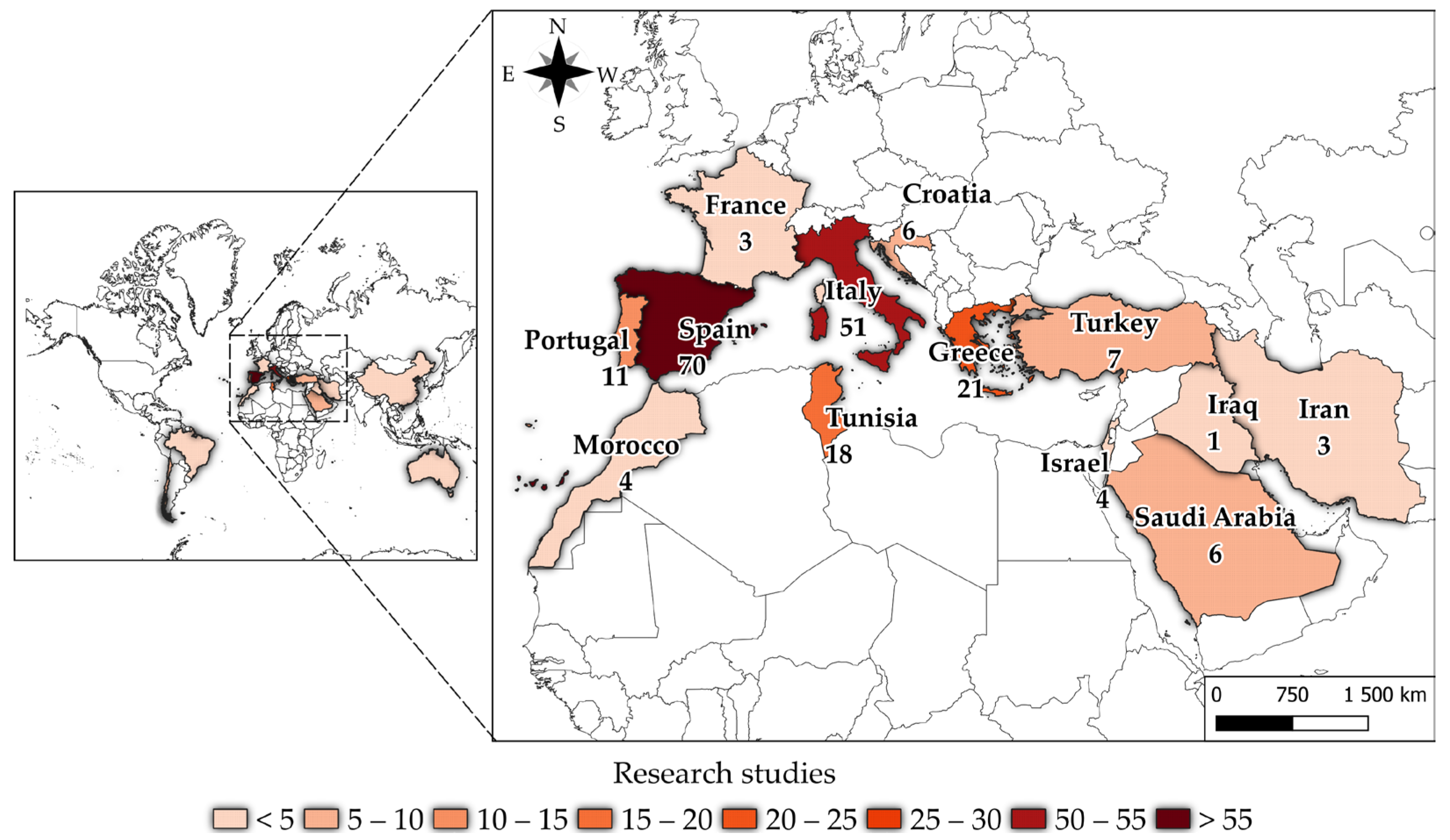
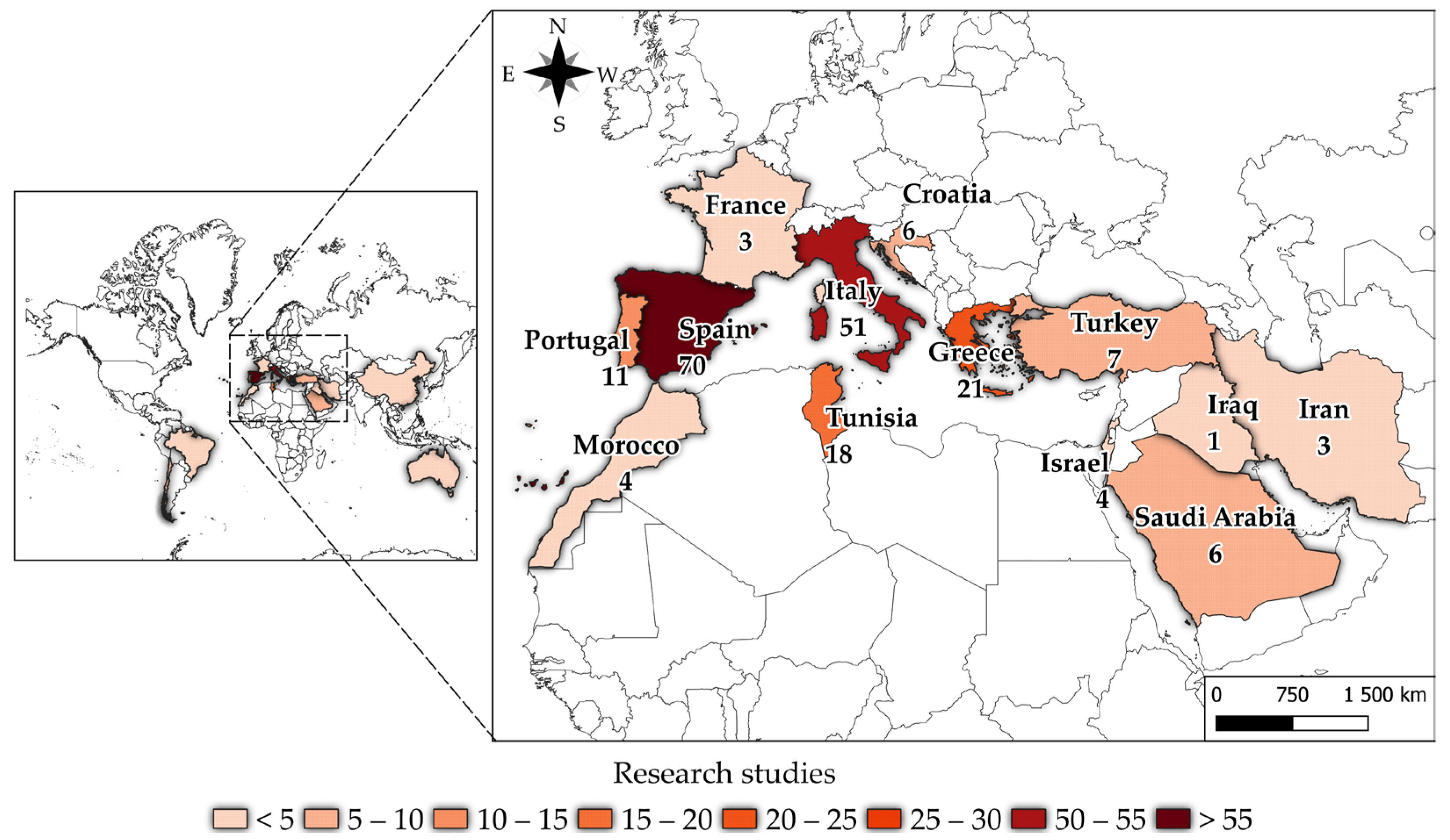
4.2. Overview of Geographical Distribution of the Research Studies
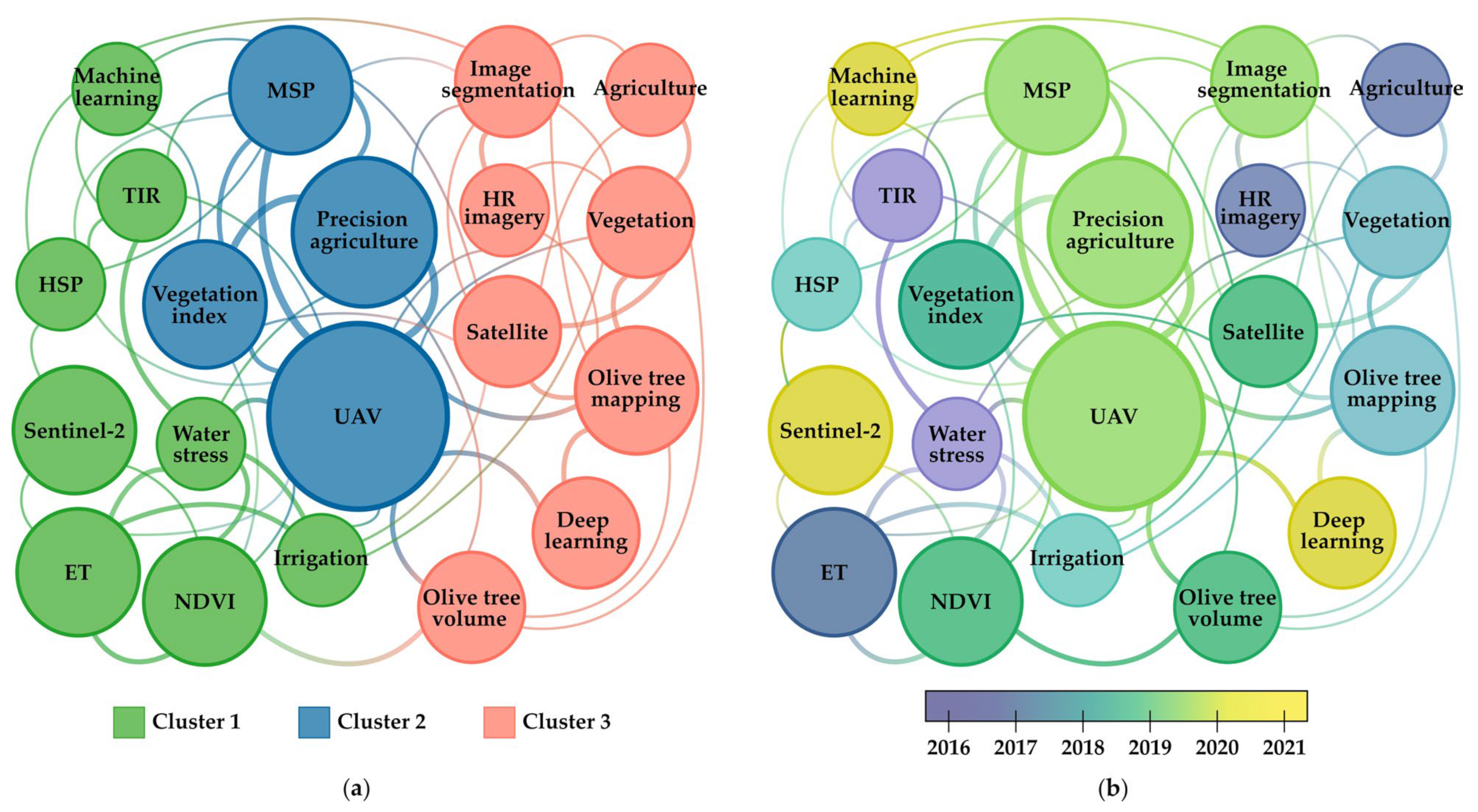
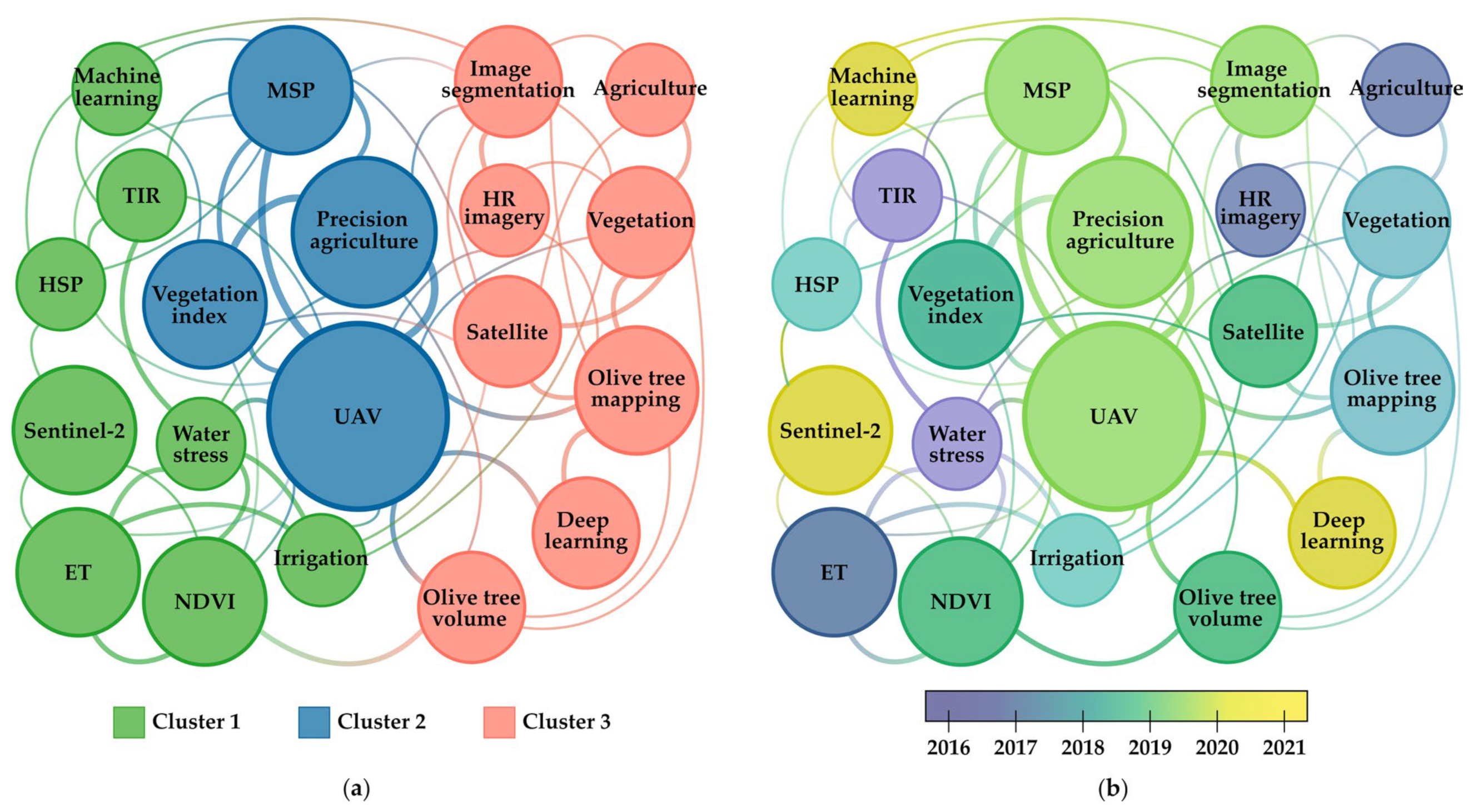
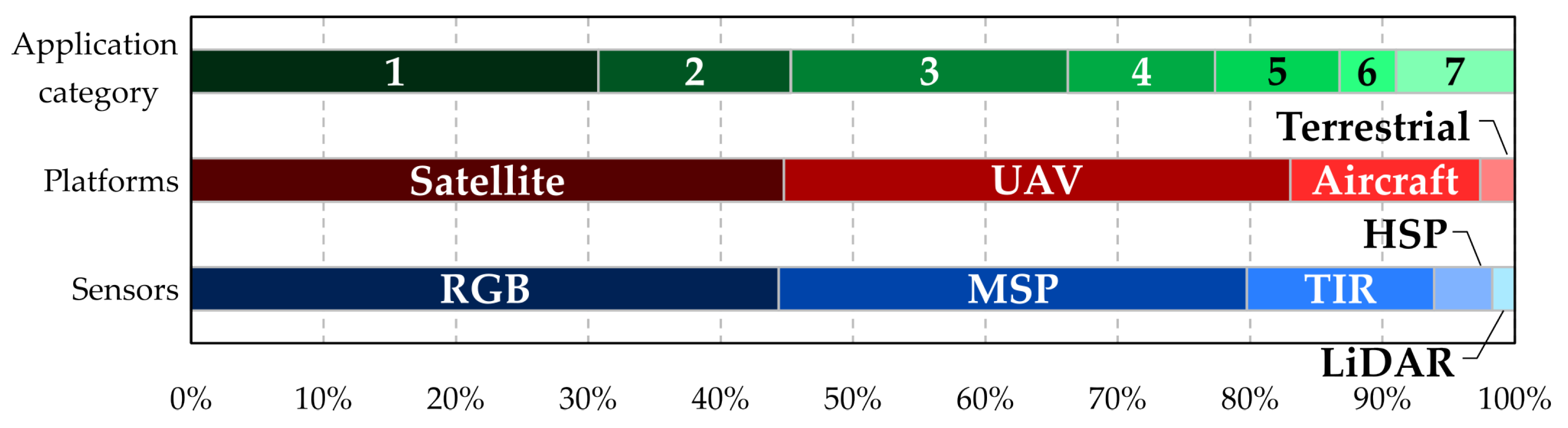
4.3. Overview of Technological Distribution of the Research Studies
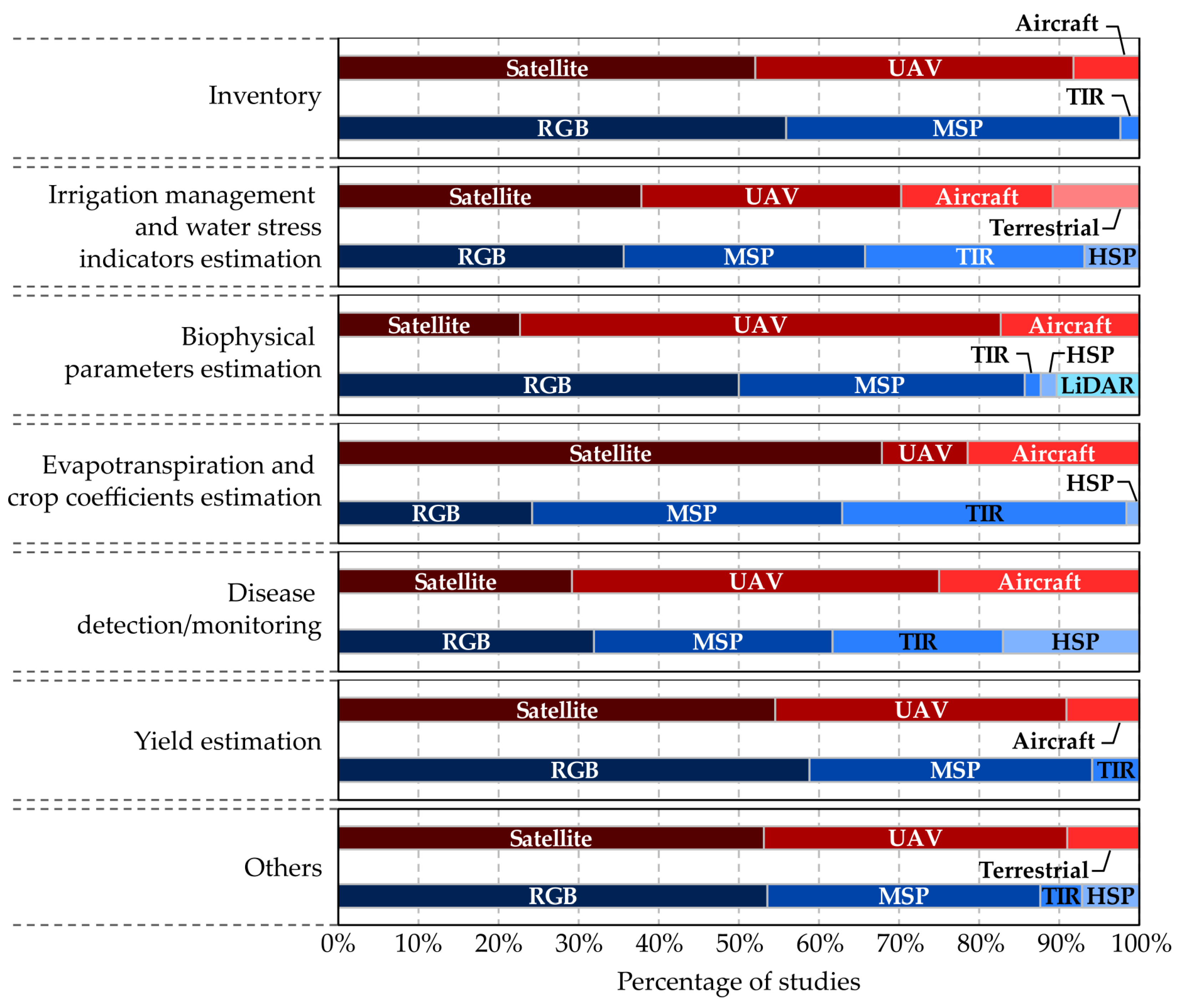
4.4. Remote Sensing Applications in Olive Growing
4.4.1. Inventory
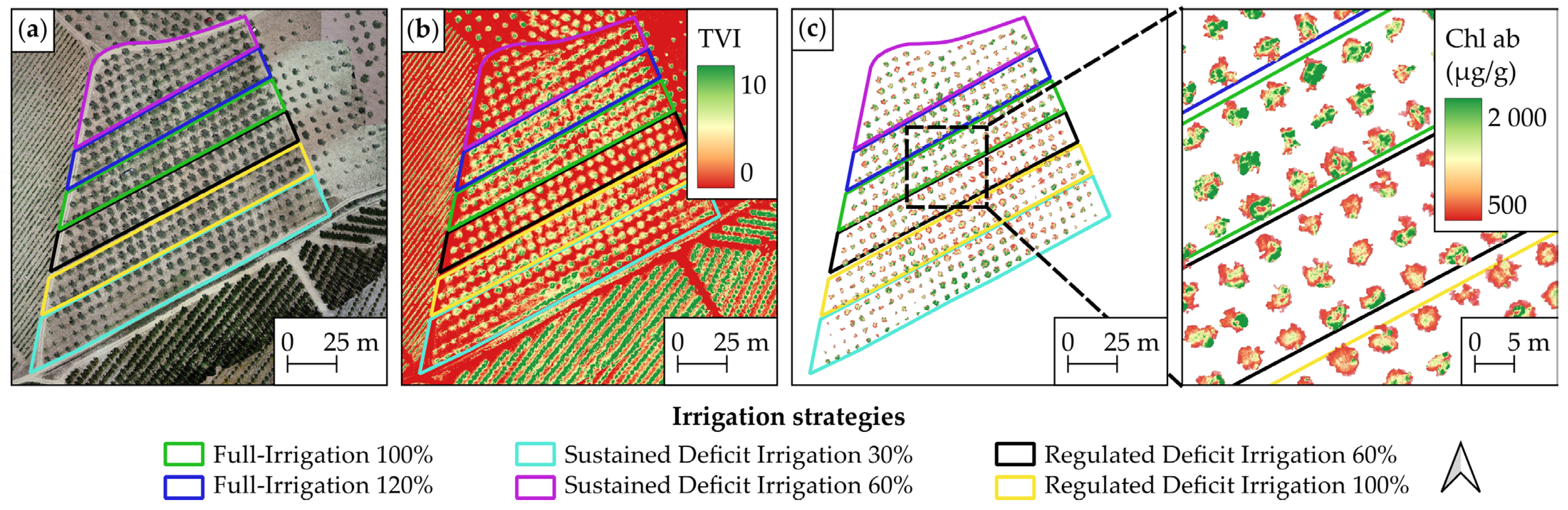
4.4.2. Irrigation Management and Water Stress Indicator Estimation
4.4.3. Biophysical Parameter Estimation
4.4.4. Crop Evapotranspiration and Crop Coefficient Estimation
4.4.5. Disease Detection/Monitoring
4.4.6. Yield Estimation
4.4.7. Others
4.5. Limitations and Future Perspectives
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- FAO. The Future of Food and Agriculture: Trends and Challenges; FAO: Rome, Italy, 2017; ISBN 978-92-5-109551-5. [Google Scholar]
- Alexandratos, N.; Bruinsma, J. World Agriculture towards 2030/2050: The 2012 Revision; ESA Working Paper No. 12-03; FAO: Rome, Italy, 2012. [Google Scholar]
- Sivakumar, M.V.K.; Gommes, R.; Baier, W. Agrometeorology and Sustainable Agriculture. Agric. For. Meteorol. 2000, 103, 11–26. [Google Scholar] [CrossRef]
- Pimentel, D.; Berger, B.; Filiberto, D.; Newton, M.; Wolfe, B.; Karabinakis, E.; Clark, S.; Poon, E.; Abbett, E.; Nandagopal, S. Water Resources: Agricultural and Environmental Issues. BioScience 2004, 54, 909–918. [Google Scholar] [CrossRef]
- Gomiero, T.; Pimentel, D.; Paoletti, M.G. Environmental Impact of Different Agricultural Management Practices: Conventional vs. Organic Agriculture. Crit. Rev. Plant Sci. 2011, 30, 95–124. [Google Scholar] [CrossRef]
- Zhang, N.; Wang, M.; Wang, N. Precision Agriculture—A Worldwide Overview. Comput. Electron. Agric. 2002, 36, 113–132. [Google Scholar] [CrossRef]
- Gebbers, R.; Adamchuk, V.I. Precision Agriculture and Food Security. Science 2010, 327, 828–831. [Google Scholar] [CrossRef] [PubMed]
- Maes, W.H.; Steppe, K. Perspectives for Remote Sensing with Unmanned Aerial Vehicles in Precision Agriculture. Trends Plant Sci. 2019, 24, 152–164. [Google Scholar] [CrossRef] [PubMed]
- Weiss, M.; Jacob, F.; Duveiller, G. Remote Sensing for Agricultural Applications: A Meta-Review. Remote Sens. Environ. 2020, 236, 111402. [Google Scholar] [CrossRef]
- Anastasiou, E.; Balafoutis, A.T.; Fountas, S. Trends in Remote Sensing Technologies in Olive Cultivation. Smart Agric. Technol. 2023, 3, 100103. [Google Scholar] [CrossRef]
- Messina, G.; Modica, G. Twenty Years of Remote Sensing Applications Targeting Landscape Analysis and Environmental Issues in Olive Growing: A Review. Remote Sens. 2022, 14, 5430. [Google Scholar] [CrossRef]
- Messina, G.; Modica, G. The Role of Remote Sensing in Olive Growing Farm Management: A Research Outlook from 2000 to the Present in the Framework of Precision Agriculture Applications. Remote Sens. 2022, 14, 5951. [Google Scholar] [CrossRef]
- Roma, E.; Catania, P. Precision Oliviculture: Research Topics, Challenges, and Opportunities—A Review. Remote Sens. 2022, 14, 1668. [Google Scholar] [CrossRef]
- Rodríguez-Garlito, E.C.; Paz-Gallardo, A. Efficiently Mapping Large Areas of Olive Trees Using Drones in Extremadura, Spain. IEEE J. Miniaturiz. Air Space Syst. 2021, 2, 148–156. [Google Scholar] [CrossRef]
- Abubakar, M.A.; Chanzy, A.; Flamain, F.; Pouget, G.; Courault, D. Delineation of Orchard, Vineyard, and Olive Trees Based on Phenology Metrics Derived from Time Series of Sentinel-2. Remote Sens. 2023, 15, 2420. [Google Scholar] [CrossRef]
- Osa, P.I.; Beck, A.-L.; Kleverman, L.; Mangin, A. Multi-Classifier Pipeline for Olive Groves Detection. Appl. Sci. 2023, 13, 420. [Google Scholar] [CrossRef]
- Modica, G.; Messina, G.; De Luca, G.; Fiozzo, V.; Praticò, S. Monitoring the Vegetation Vigor in Heterogeneous Citrus and Olive Orchards. A Multiscale Object-Based Approach to Extract Trees’ Crowns from UAV Multispectral Imagery. Comput. Electron. Agric. 2020, 175, 105500. [Google Scholar] [CrossRef]
- Ruiz, L.A.; Almonacid-Caballer, J.; Crespo-Peremarch, P.; Recio, J.A.; Pardo-Pascual, J.E.; Sánchez-García, E. Automated Classification of Crop Types and Condition in a Mediterranean Area Using a Fine-Tuned Convolutional Neural Network. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, XLIII-B3-2020, 1061–1068. [Google Scholar] [CrossRef]
- Șandric, I.; Irimia, R.; Petropoulos, G.P.; Anand, A.; Srivastava, P.K.; Pleșoianu, A.; Faraslis, I.; Stateras, D.; Kalivas, D. Tree’s Detection & Health’s Assessment from Ultra-High Resolution UAV Imagery and Deep Learning. Geocarto Int. 2022, 37, 10459–10479. [Google Scholar]
- Noguera, M.; Aquino, A.; Ponce, J.M.; Cordeiro, A.; Silvestre, J.; Arias-Calderón, R.; da Encarnação Marcelo, M.; Jordão, P.; Andújar, J.M. Nutritional Status Assessment of Olive Crops by Means of the Analysis and Modelling of Multispectral Images Taken with UAVs. Biosyst. Eng. 2021, 211, 1–18. [Google Scholar] [CrossRef]
- Noguera, M.; Millán, B.; Pérez-Paredes, J.J.; Ponce, J.M.; Aquino, A.; Andújar, J.M. A New Low-Cost Device Based on Thermal Infrared Sensors for Olive Tree Canopy Temperature Measurement and Water Status Monitoring. Remote Sens. 2020, 12, 723. [Google Scholar] [CrossRef]
- Marques, P.; Pádua, L.; Sousa, J.J.; Fernandes-Silva, A. Assessing the Water Status and Leaf Pigment Content of Olive Trees: Evaluating the Potential and Feasibility of Unmanned Aerial Vehicle Multispectral and Thermal Data for Estimation Purposes. Remote Sens. 2023, 15, 4777. [Google Scholar] [CrossRef]
- Bchir, A.; M’nassri, S.; Dhib, S.; Amri, A.E.; Mulla, D. Estimating and Mapping Evapotranspiration in Olive Groves of Semi-Arid Tunisia Using Empirical Formulas and Satellite Remote Sensing. Arab. J. Geosci. 2021, 14, 2717. [Google Scholar] [CrossRef]
- Elfarkh, J.; Johansen, K.; El Hajj, M.M.; Almashharawi, S.K.; McCabe, M.F. Evapotranspiration, Gross Primary Productivity and Water Use Efficiency over a High-Density Olive Orchard Using Ground and Satellite Based Data. Agric. Water Manag. 2023, 287, 108423. [Google Scholar] [CrossRef]
- Spyropoulos, N.V.; Dalezios, N.R.; Kaltsis, I.; Faraslis, I.N. Very High Resolution Satellite-Based Monitoring of Crop (Olive Trees) Evapotranspiration in Precision Agriculture. Int. J. Sustain. Agric. Manag. Inform. 2020, 6, 22–42. [Google Scholar] [CrossRef]
- Cuneo, P.; Jacobson, C.r.; Leishman, M.r. Landscape-Scale Detection and Mapping of Invasive African Olive (Olea europaea L. ssp. cuspidata Wall Ex G. Don Ciferri) in SW Sydney, Australia Using Satellite Remote Sensing. Appl. Veg. Sci. 2009, 12, 145–154. [Google Scholar]
- Alshammari, H.H.; Altaieb, M.O.; Boukrara, A.; Gasmi, K.; Aelmoniem, M. Expansion of the Olive Crop Based on Modeling Climatic Variables Using Geographic Information System (GIS) in Aljouf Region KSA. Comput. Electron. Agric. 2022, 202, 107280. [Google Scholar] [CrossRef]
- Torres-Sánchez, J.; Mesas-Carrascosa, F.J.; Pérez-Porras, F.; López-Granados, F. Detection of Ecballium Elaterium in Hedgerow Olive Orchards Using a Low-Cost Uncrewed Aerial Vehicle and Open-Source Algorithms. Pest Manag. Sci. 2023, 79, 645–654. [Google Scholar] [CrossRef] [PubMed]
- Castrignanò, A.; Belmonte, A.; Antelmi, I.; Quarto, R.; Quarto, F.; Shaddad, S.; Sion, V.; Muolo, M.R.; Ranieri, N.A.; Gadaleta, G.; et al. Semi-Automatic Method for Early Detection of Xylella fastidiosa in Olive Trees Using UAV Multispectral Imagery and Geostatistical-Discriminant Analysis. Remote Sens. 2021, 13, 14. [Google Scholar] [CrossRef]
- Poblete, T.; Navas-Cortes, J.A.; Camino, C.; Calderon, R.; Hornero, A.; Gonzalez-Dugo, V.; Landa, B.B.; Zarco-Tejada, P.J. Discriminating Xylella fastidiosa from Verticillium dahliae Infections in Olive Trees Using Thermal- and Hyperspectral-Based Plant Traits. ISPRS J. Photogramm. Remote Sens. 2021, 179, 133–144. [Google Scholar] [CrossRef]
- Mamalis, M.; Kalampokis, E.; Kalfas, I.; Tarabanis, K. Deep Learning for Detecting Verticillium Fungus in Olive Trees: Using YOLO in UAV Imagery. Algorithms 2023, 16, 343. [Google Scholar] [CrossRef]
- Ortenzi, L.; Violino, S.; Pallottino, F.; Figorilli, S.; Vasta, S.; Tocci, F.; Antonucci, F.; Imperi, G.; Costa, C. Early Estimation of Olive Production from Light Drone Orthophoto, through Canopy Radius. Drones 2021, 5, 118. [Google Scholar] [CrossRef]
- Sola-Guirado, R.R.; Castillo-Ruiz, F.J.; Jiménez-Jiménez, F.; Blanco-Roldan, G.L.; Castro-Garcia, S.; Gil-Ribes, J.A. Olive Actual “on Year” Yield Forecast Tool Based on the Tree Canopy Geometry Using UAS Imagery. Sensors 2017, 17, 1743. [Google Scholar] [CrossRef]
- Khan, U.; Maqsood, M.; Gillani, S.; Durrani, M.Y.; Mehmood, I.; Seo, S. A Deep Learning-Based Framework for Accurate Identification and Crop Estimation of Olive Trees. J. Supercomput. 2023, 79, 1834–1855. [Google Scholar] [CrossRef]
- Japón-Luján, R.; Luque-Rodríguez, J.M.; Luque de Castro, M.D. Dynamic Ultrasound-Assisted Extraction of Oleuropein and Related Biophenols from Olive Leaves. J. Chromatogr. A 2006, 1108, 76–82. [Google Scholar] [CrossRef] [PubMed]
- Soni, M.G.; Burdock, G.A.; Christian, M.S.; Bitler, C.M.; Crea, R. Safety Assessment of Aqueous Olive Pulp Extract as an Antioxidant or Antimicrobial Agent in Foods. Food Chem. Toxicol. 2006, 44, 903–915. [Google Scholar] [CrossRef] [PubMed]
- Fernandes-Silva, A.A.; Ferreira, T.C.; Correia, C.M.; Malheiro, A.C.; Villalobos, F.J. Influence of Different Irrigation Regimes on Crop Yield and Water Use Efficiency of Olive. Plant Soil 2010, 333, 35–47. [Google Scholar] [CrossRef]
- Sanzani, S.M.; Schena, L.; Nigro, F.; Sergeeva, V.; Ippolito, A.; Salerno, M.G. Abiotic Diseases of Olive. J. Plant Pathol. 2012, 94, 469–491. [Google Scholar]
- Zarco-Tejada, P.J.; Camino, C.; Beck, P.S.A.; Calderon, R.; Hornero, A.; Hernández-Clemente, R.; Kattenborn, T.; Montes-Borrego, M.; Susca, L.; Morelli, M.; et al. Previsual Symptoms of Xylella fastidiosa Infection Revealed in Spectral Plant-Trait Alterations. Nat. Plants 2018, 4, 432–439. [Google Scholar] [CrossRef]
- Poblete, T.; Camino, C.; Beck, P.S.A.; Hornero, A.; Kattenborn, T.; Saponari, M.; Boscia, D.; Navas-Cortes, J.A.; Zarco-Tejada, P.J. Detection of Xylella fastidiosa Infection Symptoms with Airborne Multispectral and Thermal Imagery: Assessing Bandset Reduction Performance from Hyperspectral Analysis. ISPRS J. Photogramm. Remote Sens. 2020, 162, 27–40. [Google Scholar] [CrossRef]
- Moher, D.; Liberati, A.; Tetzlaff, J.; Altman, D.G. Preferred Reporting Items for Systematic Reviews and Meta-Analyses: The PRISMA Statement. Int. J. Surg. 2010, 8, 336–341. [Google Scholar] [CrossRef]
- Rouse, J.; Haas, R.; Schell, J.; Deering, D.; Harlan, J. Monitoring the Vernal Advancements and Retrogradation; NASA: Washington, DC, USA, 1974. [Google Scholar]
- Pádua, L.; Vanko, J.; Hruška, J.; Adão, T.; Sousa, J.J.; Peres, E.; Morais, R. UAS, Sensors, and Data Processing in Agroforestry: A Review towards Practical Applications. Int. J. Remote Sens. 2017, 38, 2349–2391. [Google Scholar] [CrossRef]
- Mulla, D.J. Twenty Five Years of Remote Sensing in Precision Agriculture: Key Advances and Remaining Knowledge Gaps. Biosyst. Eng. 2013, 114, 358–371. [Google Scholar] [CrossRef]
- Bauer, M.; Cipra, J. Identification of Agricultural Crops by Computer Processing of ERTS MSS Data; LARS Technical Report; Laboratory for Applications of Remote Sensing: Lafayette, IN, USA, 1973. [Google Scholar]
- Alganci, U.; Sertel, E.; Kaya, S. Determination of the Olive Trees with Object Based Classification of Pleiades Satellite Image. Int. J. Environ. Geoinformat. 2018, 5, 132–139. [Google Scholar] [CrossRef]
- Akcay, H.; Kaya, S.; Sertel, E.; Alganci, U. Determination of Olive Trees with Multi-Sensor Data Fusion. In Proceedings of the 2019 8th International Conference on Agro-Geoinformatics (Agro-Geoinformatics), Istanbul, Turkey, 16–19 July 2019; pp. 1–6. [Google Scholar]
- Huang, Y.; Thomson, S.J.; Brand, H.J.; Reddy, K.N. Development and Evaluation of Low-Altitude Remote Sensing Systems for Crop Production Management. Int. J. Agric. Biol. Eng. 2016, 9, 1–11. [Google Scholar]
- Candiago, S.; Remondino, F.; De Giglio, M.; Dubbini, M.; Gattelli, M. Evaluating Multispectral Images and Vegetation Indices for Precision Farming Applications from UAV Images. Remote Sens. 2015, 7, 4026–4047. [Google Scholar] [CrossRef]
- Paço, T.A.; Pôças, I.; Cunha, M.; Silvestre, J.C.; Santos, F.L.; Paredes, P.; Pereira, L.S. Evapotranspiration and Crop Coefficients for a Super Intensive Olive Orchard. An Application of SIMDualKc and METRIC Models Using Ground and Satellite Observations. J. Hydrol. 2014, 519, 2067–2080. [Google Scholar] [CrossRef]
- Pôças, I.; Paço, T.A.; Cunha, M.; Andrade, J.A.; Silvestre, J.; Sousa, A.; Santos, F.L.; Pereira, L.S.; Allen, R.G. Satellite-Based Evapotranspiration of a Super-Intensive Olive Orchard: Application of METRIC Algorithms. Biosyst. Eng. 2014, 128, 69–81. [Google Scholar] [CrossRef]
- Sparks, A.M.; Bouhamed, I.; Boschetti, L.; Gitas, I.Z.; Kalaitzidis, C. Mapping Arable Land and Permanent Agriculture Extent and Change in Southern Greece Using the European Union LUCAS Survey and a 35-Year Landsat Time Series Analysis. Remote Sens. 2022, 14, 3369. [Google Scholar] [CrossRef]
- Kharrou, M.H.; Simonneaux, V.; Er-Raki, S.; Le Page, M.; Khabba, S.; Chehbouni, A. Assessing Irrigation Water Use with Remote Sensing-Based Soil Water Balance at an Irrigation Scheme Level in a Semi-Arid Region of Morocco. Remote Sens. 2021, 13, 1133. [Google Scholar] [CrossRef]
- Pieri, M.; Cantini, C.; Giovannelli, A.; Maselli, F.; Chiesi, M.; Battista, P.; Fibbi, L.; Gardin, L.; Rapi, B.; Romani, M.; et al. Estimation of Actual Evapotranspiration in Fragmented Mediterranean Areas by the Spatio-Temporal Fusion of NDVI Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 5108–5117. [Google Scholar] [CrossRef]
- Häusler, M.; Conceição, N.; Tezza, L.; Sánchez, J.M.; Campagnolo, M.L.; Häusler, A.J.; Silva, J.M.N.; Warneke, T.; Heygster, G.; Ferreira, M.I. Estimation and Partitioning of Actual Daily Evapotranspiration at an Intensive Olive Grove Using the STSEB Model Based on Remote Sensing. Agric. Water Manag. 2018, 201, 188–198. [Google Scholar] [CrossRef]
- Pôças, I.; Paço, T.A.; Paredes, P.; Cunha, M.; Pereira, L.S. Estimation of Actual Crop Coefficients Using Remotely Sensed Vegetation Indices and Soil Water Balance Modelled Data. Remote Sens. 2015, 7, 2373–2400. [Google Scholar] [CrossRef]
- Unal, E.; Mermer, A.; Dogan, H.M. Determining Major Orchard (Pistachio, Olive, Vineyard) Areas in Gaziantep Province Using Remote Sensing Techniques. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 35 (Part B7), 160–163. [Google Scholar]
- Torkashvand, A.M.; Shadparvar, V. Proposing a Methodology in Preparation of Olive Orchards Map by Remote Sensing and Geographic Information System. In Proceedings of the 19th International Conference on GeoInformatics, Shanghai, China, 24–26 June 2011; pp. 1–6. [Google Scholar]
- Torkashvand, A.M.; Zahedi, S.S. Providing a Supervised Map of Olive Orchards by IRS Satellite Images. Life Sci. J. 2011, 8, 127–133. [Google Scholar]
- Maselli, F.; Chiesi, M.; Brilli, L.; Moriondo, M. Simulation of Olive Fruit Yield in Tuscany through the Integration of Remote Sensing and Ground Data. Ecol. Model. 2012, 244, 1–12. [Google Scholar] [CrossRef]
- Ortega-Farías, S.; Ortega-Salazar, S.; Aguilar, R.; de la Fuente, D.; Fuentes, F. Evaluation of a Model to Estimate Net Radiation over a Drip-Irrigated Olive Orchard Using Landsat Satellite Images. Acta Hortic. 2014, 309–314. [Google Scholar] [CrossRef]
- Fuentes-Peñailillo, F.; Ortega-Farías, S.; Acevedo-Opazo, C.; Fonseca-Luengo, D. Implementation of a Two-Source Model for Estimating the Spatial Variability of Olive Evapotranspiration Using Satellite Images and Ground-Based Climate Data. Water 2018, 10, 339. [Google Scholar] [CrossRef]
- Yildirim, T.; Zhou, Y.; Flynn, K.C.; Gowda, P.H.; Ma, S.; Moriasi, D.N. Evaluating the Sensitivity of Vegetation and Water Indices to Monitor Drought for Three Mediterranean Crops. Agron. J. 2021, 113, 123–134. [Google Scholar] [CrossRef]
- Elfarkh, J.; Er-Raki, S.; Ezzahar, J.; Chehbouni, A.; Aithssaine, B.; Amazirh, A.; Khabba, S.; Jarlan, L. Integrating Thermal Stress Indexes within Shuttleworth–Wallace Model for Evapotranspiration Mapping over a Complex Surface. Irrig. Sci. 2021, 39, 45–61. [Google Scholar] [CrossRef]
- Ortega-Salazar, S.; Ortega-Farías, S.; Kilic, A.; Allen, R. Performance of the METRIC Model for Mapping Energy Balance Components and Actual Evapotranspiration over a Superintensive Drip-Irrigated Olive Orchard. Agric. Water Manag. 2021, 251, 106861. [Google Scholar] [CrossRef]
- Castelli, G.; Oliveira, L.A.A.; Abdelli, F.; Dhaou, H.; Bresci, E.; Ouessar, M. Effect of Traditional Check Dams (Jessour) on Soil and Olive Trees Water Status in Tunisia. Sci. Total Environ. 2019, 690, 226–236. [Google Scholar] [CrossRef]
- Ramírez-Cuesta, J.M.; Kilic, A.; Allen, R.; Santos, C.; Lorite, I.J. Evaluating the Impact of Adjusting Surface Temperature Derived from Landsat 7 ETM+ in Crop Evapotranspiration Assessment Using High-Resolution Airborne Data. Int. J. Remote Sens. 2017, 38, 4177–4205. [Google Scholar] [CrossRef]
- Bazi, Y.; Al-Sharari, H.; Melgani, F. An Automatic Method for Counting Olive Trees in Very High Spatial Remote Sensing Images. In Proceedings of the 2009 IEEE International Geoscience and Remote Sensing Symposium, Cape Town, South Africa, 12–17 July 2009; Volume 2, pp. 125–128. [Google Scholar]
- Alexakis, D.D.; Sarris, A.; Kalaitzidis, C.; Papadopoulos, N.; Soupios, P. Integrated Use of Satellite Remote Sensing, GIS, and Ground Spectroscopy Techniques for Monitoring Olive Oil Mill Waste Disposal Areas on the Island of Crete, Greece. Int. J. Remote Sens. 2016, 37, 669–693. [Google Scholar] [CrossRef]
- Masson, J.; Soille, P.; Mueller, R. Tests with VHR Images for the Identification of Olive Trees and Other Fruit Trees in the European Union. In Proceedings of the Remote Sensing for Agriculture, Ecosystems, and Hydrology VI, Maspalomas, Spain, 26 October 2004; SPIE: Bellingham, DC, USA, 2004; Volume 5568, pp. 23–36. [Google Scholar]
- Karantzalos, K.; Argialas, D. Improving Edge Detection and Watershed Segmentation with Anisotropic Diffusion and Morphological Levellings. Int. J. Remote Sens. 2006, 27, 5427–5434. [Google Scholar] [CrossRef]
- Semeraro, T.; Buccolieri, R.; Vergine, M.; De Bellis, L.; Luvisi, A.; Emmanuel, R.; Marwan, N. Analysis of Olive Grove Destruction by Xylella fastidiosa Bacterium on the Land Surface Temperature in Salento Detected Using Satellite Images. Forests 2021, 12, 1266. [Google Scholar] [CrossRef]
- Battista, P.; Chiesi, M.; Rapi, B.; Romani, M.; Cantini, C.; Giovannelli, A.; Cocozza, C.; Tognetti, R.; Maselli, F. Integration of Ground and Multi-Resolution Satellite Data for Predicting the Water Balance of a Mediterranean Two-Layer Agro-Ecosystem. Remote Sens. 2016, 8, 731. [Google Scholar] [CrossRef]
- Blum, M.; Lensky, I.M.; Nestel, D. Estimation of Olive Grove Canopy Temperature from MODIS Thermal Imagery Is More Accurate than Interpolation from Meteorological Stations. Agric. For. Meteorol. 2013, 176, 90–93. [Google Scholar] [CrossRef]
- Telesca, L.; Abate, N.; Faridani, F.; Lovallo, M.; Lasaponara, R. Discerning Xylella Fastidiosa-Infected Olive Orchards in the Time Series of MODIS Terra Satellite Evapotranspiration Data by Using the Fisher–Shannon Analysis and the Multifractal Detrended Fluctuation Analysis. Fractal Fract. 2023, 7, 466. [Google Scholar] [CrossRef]
- Telesca, L.; Abate, N.; Faridani, F.; Lovallo, M.; Lasaponara, R. Revealing Traits of Phytopathogenic Status Induced by Xylella fastidiosa in Olive Trees by Analysing Multifractal and Informational Patterns of MODIS Satellite Evapotranspiration Data. Phys. Stat. Mech. Its Appl. 2023, 629, 129163. [Google Scholar] [CrossRef]
- Brilli, L.; Chiesi, M.; Maselli, F.; Moriondo, M.; Gioli, B.; Toscano, P.; Zaldei, A.; Bindi, M. Simulation of Olive Grove Gross Primary Production by the Combination of Ground and Multi-Sensor Satellite Data. Int. J. Appl. Earth Obs. Geoinf. 2013, 23, 29–36. [Google Scholar] [CrossRef]
- Sepulcre-Canto, G.; Zarco-Tejada, P.J.; Jimenez-Berni, J.A.; Rodriguez, A.J.; Jimenez-Munoz, J.C.; Sobrino, J.A.; Cifuentes, V. Detecting Crop Irrigation Status in Orchard Canopies with Airborne and ASTER Thermal Imagery. In Proceedings of the 2007 IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–28 July 2007; pp. 3643–3646. [Google Scholar]
- González, J.; Galindo, C.; Arevalo, V.; Ambrosio, G. Applying Image Analysis and Probabilistic Techniques for Counting Olive Trees in High-Resolution Satellite Images. In Proceedings of the Advanced Concepts for Intelligent Vision Systems; Blanc-Talon, J., Philips, W., Popescu, D., Scheunders, P., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 920–931. [Google Scholar]
- García Torres, L.; Peña-Barragán, J.M.; López-Granados, F.; Jurado-Expósito, M.; Fernández-Escobar, R. Automatic Assessment of Agro-Environmental Indicators from Remotely Sensed Images of Tree Orchards and Its Evaluation Using Olive Plantations. Comput. Electron. Agric. 2008, 61, 179–191. [Google Scholar] [CrossRef]
- Gómez, J.A.; Zarco-Tejada, P.J.; García-Morillo, J.; Gama, J.; Soriano, M.A. Determining Biophysical Parameters for Olive Trees Using CASI-Airborne and Quickbird-Satellite Imagery. Agron. J. 2011, 103, 644–654. [Google Scholar] [CrossRef]
- Castillejo-González, I. Mapping of Olive Trees Using Pansharpened QuickBird Images: An Evaluation of Pixel- and Object-Based Analyses. Agronomy 2018, 8, 288. [Google Scholar] [CrossRef]
- Apan, A.; Young, F.R.; Phinn, S.; Held, A.; Favier, J. Mapping Olive Varieties and within-Field Spatial Variability Using High Resolution QuickBird Imagery. In Proceedings of the 12th Australasian Remote Sensing and Photogrammetry Conference, Fremantle, Australia, 18–22 October 2004; Spatial Sciences Institute: Los Angeles, CA, USA, 2004. [Google Scholar]
- Karydas, C.G.; Sekuloska, T.; Silleos, G.N. Quantification and Site-Specification of the Support Practice Factor When Mapping Soil Erosion Risk Associated with Olive Plantations in the Mediterranean Island of Crete. Environ. Monit. Assess. 2009, 149, 19–28. [Google Scholar] [CrossRef] [PubMed]
- Peña-Barragán, J.M.; López-Granados, F.; García-Torres, L.; Jurado-Expósito, M.; Sánchez de la Orden, M.; García-Ferrer, A. Discriminating Cropping Systems and Agro-Environmental Measures by Remote Sensing. Agron. Sustain. Dev. 2008, 28, 355–362. [Google Scholar] [CrossRef]
- Navarro, R.; Wirkus, L.; Dubovyk, O. Spatio-Temporal Assessment of Olive Orchard Intensification in the Saïss Plain (Morocco) Using k-Means and High-Resolution Satellite Data. Remote Sens. 2023, 15, 50. [Google Scholar] [CrossRef]
- Kurucu, Y.; Esetlili, T.; Erden, H.; Öztürk, G.; Güven, A.İ.; Çamaşırcıoğlu, E. Digitalization of Olive Trees by Using Remote Sensing Techniques. In Proceedings of the 2015 Fourth International Conference on Agro-Geoinformatics (Agro-geoinformatics), Istanbul, Turkey, 20–24 July 2015; pp. 121–124. [Google Scholar]
- Lin, C.; Jin, Z.; Mulla, D.; Ghosh, R.; Guan, K.; Kumar, V.; Cai, Y. Toward Large-Scale Mapping of Tree Crops with High-Resolution Satellite Imagery and Deep Learning Algorithms: A Case Study of Olive Orchards in Morocco. Remote Sens. 2021, 13, 1740. [Google Scholar] [CrossRef]
- Poblete, T.; Navas-Cortes, J.A.; Hornero, A.; Camino, C.; Calderon, R.; Hernandez-Clemente, R.; Landa, B.B.; Zarco-Tejada, P.J. Detection of Symptoms Induced by Vascular Plant Pathogens in Tree Crops Using High-Resolution Satellite Data: Modelling and Assessment with Airborne Hyperspectral Imagery. Remote Sens. Environ. 2023, 295, 113698. [Google Scholar] [CrossRef]
- Belfiore, O.R.; Aguilar, M.A.; Parente, C. Processing Very High-Resolution Satellite Images for Individual Tree Identification with Local Maxima Method. In Proceedings of the R3 in Geomatics: Research, Results and Review; Parente, C., Troisi, S., Vettore, A., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 323–335. [Google Scholar]
- Blonda, P.; Tarantino, C.; Scortichini, M.; Maggi, S.; Tarantino, M.; Adamo, M. Satellite Monitoring of Bio-Fertilizer Restoration in Olive Groves Affected by Xylella fastidiosa Subsp. Pauca. Sci. Rep. 2023, 13, 5695. [Google Scholar] [CrossRef] [PubMed]
- Kefi, M.; Pham, T.D.; Kashiwagi, K.; Yoshino, K. Identification of Irrigated Olive Growing Farms Using Remote Sensing Techniques. Euro-Mediterr. J. Environ. Integr. 2016, 1, 3. [Google Scholar] [CrossRef]
- Reyes Rojas, L.A.; Moletto-Lobos, I.; Corradini, F.; Mattar, C.; Fuster, R.; Escobar-Avaria, C. Determining Actual Evapotranspiration Based on Machine Learning and Sinusoidal Approaches Applied to Thermal High-Resolution Remote Sensing Imagery in a Semi-Arid Ecosystem. Remote Sens. 2021, 13, 4105. [Google Scholar] [CrossRef]
- Kefi, M.; Pham, T.D.; Ha, N.T.; Kenichi, K. Assessment of Drought Impact on Agricultural Production Using Remote Sensing and Machine Learning Techniques in Kairouan Prefecture, Tunisia. In Applications of Space Techniques on the Natural Hazards in the MENA Region; Al Saud, M.M., Ed.; Springer International Publishing: Cham, Switzerland, 2022; pp. 401–418. ISBN 978-3-030-88874-9. [Google Scholar]
- Mezzi, R.; Alioscha-Perez, M.; Allani, M.; Guedri, F.; Zouabi, A.; Beji, R.; Sahli, H.; Sahli, A. Olive Tree Classification and Inventory with Medium Resolution Multi-Spectral Satellite Imagery. In Space Fostering African Societies: Developing the African Continent through Space, Part 1; Springer: Berlin/Heidelberg, Germany, 2020; pp. 13–30. [Google Scholar]
- Solano, F.; Di Fazio, S.; Modica, G. A Methodology Based on GEOBIA and WorldView-3 Imagery to Derive Vegetation Indices at Tree Crown Detail in Olive Orchards. Int. J. Appl. Earth Obs. Geoinf. 2019, 83, 101912. [Google Scholar] [CrossRef]
- Domazetovic, F.; Siljeg, A.; Maric, I.; Jurisic, M. Assessing the Vertical Accuracy of Worldview-3 Stereo-Extracted Digital Surface Model over Olive Groves. GISTAM 2020, 246, 253. [Google Scholar]
- Rivera, A.J.; Pérez-Godoy, M.D.; Elizondo, D.; Deka, L.; del Jesus, M.J. A Preliminary Study on Crop Classification with Unsupervised Algorithms for Time Series on Images with Olive Trees and Cereal Crops. In Proceedings of the 15th International Conference on Soft Computing Models in Industrial and Environmental Applications (SOCO 2020), Burgos, Spain, 16–18 September 2020; Springer International Publishing: Cham, Switzerland, 2021; pp. 276–285. [Google Scholar]
- Hornero, A.; Hernández-Clemente, R.; North, P.R.J.; Beck, P.S.A.; Boscia, D.; Navas-Cortes, J.A.; Zarco-Tejada, P.J. Monitoring the Incidence of Xylella fastidiosa Infection in Olive Orchards Using Ground-Based Evaluations, Airborne Imaging Spectroscopy and Sentinel-2 Time Series through 3-D Radiative Transfer Modelling. Remote Sens. Environ. 2020, 236, 111480. [Google Scholar] [CrossRef]
- Makhloufi, A.; Kallel, A.; Chaker, R.; Gastellu-Etchegorry, J.-P. Retrieval of Olive Tree Biophysical Properties from Sentinel-2 Time Series Based on Physical Modelling and Machine Learning Technique. Int. J. Remote Sens. 2021, 42, 8542–8571. [Google Scholar] [CrossRef]
- Moral, F.J.; Rebollo, F.J.; Millán, S.; Prieto, H.; Pérez, J.M.; Campillo, C. Can Satellite-Derived Vigour Maps Be Used to Delineate Homogeneous Zones in Hedgerow Olive Orchards? In Precision Agriculture’19; Wageningen Academic Publishers: Wageningen, The Netherlands, 2019; pp. 477–483. ISBN 978-90-8686-337-2. [Google Scholar]
- Abdelmoula, H.; Kallel, A.; Roujean, J.-L.; Gastellu-Etchegorry, J.-P. Dynamic Retrieval of Olive Tree Properties Using Bayesian Model and Sentinel-2 Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 9267–9286. [Google Scholar] [CrossRef]
- Blázquez-Carrasco, Á.; Gómez-Giráldez, P.J.; Castro-Rodríguez, J.; Colombo, S.; Carpintero, E.; González-Dugo, M.P. Estimation of Olive Groves Cover Crops Net Primary Productivity Using Remote Sensing Data. In Remote Sensing for Agriculture, Ecosystems, and Hydrology XXIII; SPIE: Bellingham, WA, USA, 2021; Volume 11856, p. 118560S. [Google Scholar]
- Navrozidis, I.; Alexandridis, T.; Moshou, D.; Haugommard, A.; Lagopodi, A. Implementing Sentinel-2 Data and Machine Learning to Detect Plant Stress in Olive Groves. Remote Sens. 2022, 14, 5947. [Google Scholar] [CrossRef]
- Leolini, L.; Moriondo, M.; Rossi, R.; Bellini, E.; Brilli, L.; López-Bernal, Á.; Santos, J.A.; Fraga, H.; Bindi, M.; Dibari, C.; et al. Use of Sentinel-2 Derived Vegetation Indices for Estimating fPAR in Olive Groves. Agronomy 2022, 12, 1540. [Google Scholar] [CrossRef]
- Chiesi, M.; Costafreda-Aumedes, S.; Argenti, G.; Battista, P.; Fibbi, L.; Leolini, L.; Moriondo, M.; Rapi, B.; Sabatini, F.; Maselli, F. Estimating the GPP of Olive Trees with Variable Canopy Cover by the Use of Sentinel-2 MSI Images. Eur. J. Agron. 2022, 141, 126618. [Google Scholar] [CrossRef]
- Panagiotopoulou, A.; Charou, E.; Poirazidis, K.; Voutos, Y.; Martinis, A.; Grammatikopoulos, L.; Petsa, E.; Bratsolis, E.; Mylonas, P. Deep-Learning Based Super-Resolution of Sentinel-2 Images for Monitoring Supercentenarian Olive Trees. In Proceedings of the 25th Pan-Hellenic Conference on Informatics, Volos, Greece, 26–28 November 2021; Association for Computing Machinery: New York, NY, USA, 2022; pp. 143–148. [Google Scholar]
- Guermazi, E.; Wali, A.; Ksibi, M. Combining Remote Sensing, SPAD Readings, and Laboratory Analysis for Monitoring Olive Groves and Olive Oil Quality. Precis. Agric. 2023, 25, 65–82. [Google Scholar] [CrossRef]
- Volpi, I.; Marchi, S.; Petacchi, R.; Hoxha, K.; Guidotti, D. Detecting Olive Grove Abandonment with Sentinel-2 and Machine Learning: The Development of a Web-Based Tool for Land Management. Smart Agric. Technol. 2023, 3, 100068. [Google Scholar] [CrossRef]
- Battista, P.; Bellini, E.; Chiesi, M.; Costafreda-Aumedes, S.; Fibbi, L.; Leolini, L.; Moriondo, M.; Rapi, B.; Rossi, R.; Sabatini, F.; et al. Estimating the Effect of Water Shortage on Olive Trees by the Combination of Meteorological and Sentinel-2 Data. Eur. J. Remote Sens. 2023, 56, 2194553. [Google Scholar] [CrossRef]
- Shaik, R.U.; Jallu, S.B.; Doctor, K. Unveiling Temperature Patterns in Tree Canopies across Diverse Heights and Types. Remote Sens. 2023, 15, 2080. [Google Scholar] [CrossRef]
- Chiraz, M.C.; Olfa, M.; Hamadi, H. Remote Sensing and Soil Moisture Data for Water Productivity Determination. Agric. Water Manag. 2022, 263, 107482. [Google Scholar] [CrossRef]
- Martínez-Ruedas, C.; Guerrero-Ginel, J.E.; Fernández-Ahumada, E. Methodology for the Automatic Inventory of Olive Groves at the Plot and Polygon Level. Agronomy 2022, 12, 1735. [Google Scholar] [CrossRef]
- Dindaroğlu, T.; Kılıç, M.; Günal, E.; Gündoğan, R.; Akay, A.E.; Seleiman, M. Multispectral UAV and Satellite Images for Digital Soil Modeling with Gradient Descent Boosting and Artificial Neural Network. Earth Sci. Inform. 2022, 15, 2239–2263. [Google Scholar] [CrossRef]
- Cantini, C.; Nepi, P.E.; Avola, G.; Riggi, E. Direct and Indirect Ground Estimation of Leaf Area Index to Support Interpretation of NDVI Data from Satellite Images in Hedgerow Olive Orchards. Smart Agric. Technol. 2023, 5, 100267. [Google Scholar] [CrossRef]
- Hachicha, M.; Kallel, A.; Louati, M. Prediction of Plant Growth Based on Statistical Methods and Remote Sensing Data. J. Appl. Remote Sens. 2021, 15, 042410. [Google Scholar] [CrossRef]
- Panagiotopoulou, A.; Bratsolis, E.; Grammatikopoulos, L.; Petsa, E.; Charou, E.; Poirazidis, K.; Martinis, A.; Madamopoulos, N. Sentinel-2 Images at 2.5 m Spatial Resolution via Deep-Learning: A Case Study in Zakythnos. In In Proceedings of the 2022 IEEE 14th Image, Video, and Multidimensional Signal Processing Workshop (IVMSP), Nafplio, Greece, 26–29 June 2022; 2022. [Google Scholar]
- Aguirre-García, S.-D.; Aranda-Barranco, S.; Nieto, H.; Serrano-Ortiz, P.; Sánchez-Cañete, E.-P.; Guerrero-Rascado, J.-L. Modelling Actual Evapotranspiration Using a Two Source Energy Balance Model with Sentinel Imagery in Herbaceous-Free and Herbaceous-Cover Mediterranean Olive Orchards. Agric. For. Meteorol. 2021, 311, 108692. [Google Scholar] [CrossRef]
- Ioannis, N.; Alexandridis, T.K.; Moshou, D.; Pantazi, X.E.; Alexandra Tamouridou, A.; Kozhukh, D.; Castef, F.; Lagopodi, A.; Zartaloudis, Z.; Mourelatos, S.; et al. Olive Trees Stress Detection Using Sentinel-2 Images. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 7220–7223. [Google Scholar]
- Abdelmoula, H.; Kallel, A.; Rouiean, L.-L.; Chaabouni, S.; Gargouri, K.; Ghrab, M.; Gastellu-Etchegorry, J.-P.; Lauret, N. Olive Biophysical Property Estimation Based on Sentinel-2 Image Inversion; IEEE: Piscataway, NJ, USA, 2018; pp. 2869–2872. [Google Scholar]
- Abdelmoula, H.; Kallel, A.; Roujean, J.-L.; Chaabouni, S.; Gargouri, K.; Ghrab, M.; Gastellu-Etchegorry, J.-P.; Lauret, N. Bayesian Inversion Technique of Olive Tree Biophysical Properties Using Sentinel-2 Images. In Proceedings of the 2018 4th International Conference on Advanced Technologies for Signal and Image Processing (ATSIP), Sousse, Tunisia, 21–24 March 2018; pp. 1–5. [Google Scholar]
- Hornero, A.; Hernández-Clemente, R.; Beck, P.S.A.; Navas-Cortés, J.A.; Zarco-Tejada, P.J. Using Sentinel-2 Imagery to Track Changes Produced by Xylella fastidiosa in Olive Trees. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 9060–9062. [Google Scholar]
- Brinkhoff, J.; Schultz, A.; Suarez, L.A.; Robson, A.J. Olive Tree Water Stress Detection Using Daily Multispectral Imagery. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 5826–5829. [Google Scholar]
- Matese, A.; Toscano, P.; Di Gennaro, S.F.; Genesio, L.; Vaccari, F.P.; Primicerio, J.; Belli, C.; Zaldei, A.; Bianconi, R.; Gioli, B. Intercomparison of UAV, Aircraft and Satellite Remote Sensing Platforms for Precision Viticulture. Remote Sens. 2015, 7, 2971–2990. [Google Scholar] [CrossRef]
- Berni, J.A.J.; Zarco-Tejada, P.J.; Sepulcre-Cantó, G.; Fereres, E.; Villalobos, F. Mapping Canopy Conductance and CWSI in Olive Orchards Using High Resolution Thermal Remote Sensing Imagery. Remote Sens. Environ. 2009, 113, 2380–2388. [Google Scholar] [CrossRef]
- Calderón, R.; Navas-Cortés, J.A.; Zarco-Tejada, P.J. Early Detection and Quantification of Verticillium Wilt in Olive Using Hyperspectral and Thermal Imagery over Large Areas. Remote Sens. 2015, 7, 5584–5610. [Google Scholar] [CrossRef]
- Estornell, J.; Velázquez-Martí, B.; López-Cortés, I.; Salazar, D.; Fernández-Sarría, A. Estimation of Wood Volume and Height of Olive Tree Plantations Using Airborne Discrete-Return LiDAR Data. GIScience Remote Sens. 2014, 51, 17–29. [Google Scholar] [CrossRef]
- Alvarez-Vanhard, E.; Corpetti, T.; Houet, T. UAV & Satellite Synergies for Optical Remote Sensing Applications: A Literature Review. Sci. Remote Sens. 2021, 3, 100019. [Google Scholar]
- Herwitz, S.R.; Johnson, L.F.; Dunagan, S.E.; Higgins, R.G.; Sullivan, D.V.; Zheng, J.; Lobitz, B.M.; Leung, J.G.; Gallmeyer, B.A.; Aoyagi, M.; et al. Imaging from an Unmanned Aerial Vehicle: Agricultural Surveillance and Decision Support. Comput. Electron. Agric. 2004, 44, 49–61. [Google Scholar] [CrossRef]
- Berni, J.A.J.; Zarco-Tejada, P.J.; Suarez, L.; Fereres, E. Thermal and Narrowband Multispectral Remote Sensing for Vegetation Monitoring from an Unmanned Aerial Vehicle. IEEE Trans. Geosci. Remote Sens. 2009, 47, 722–738. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; Guillén-Climent, M.L.; Hernández-Clemente, R.; Catalina, A.; González, M.R.; Martín, P. Estimating Leaf Carotenoid Content in Vineyards Using High Resolution Hyperspectral Imagery Acquired from an Unmanned Aerial Vehicle (UAV). Agric. For. Meteorol. 2013, 171–172, 281–294. [Google Scholar] [CrossRef]
- Quiróz, R. Remote Sensing as a Monitoring Tool for Cropping Area Determination in Smallholder Agriculture in Tanzania and Uganda. 2015. Available online: https://hdl.handle.net/10568/69110 (accessed on 8 January 2024).
- Pajares, G. Overview and Current Status of Remote Sensing Applications Based on Unmanned Aerial Vehicles (UAVs). Photogramm. Eng. Remote Sens. 2015, 81, 281–330. [Google Scholar] [CrossRef]
- Torres-Sánchez, J.; López-Granados, F.; Borra-Serrano, I.; Peña, J.M. Assessing UAV-Collected Image Overlap Influence on Computation Time and Digital Surface Model Accuracy in Olive Orchards. Precis. Agric. 2018, 19, 115–133. [Google Scholar] [CrossRef]
- Torres-Sánchez, J.; López-Granados, F.; Serrano, N.; Arquero, O.; Peña, J.M. High-Throughput 3-D Monitoring of Agricultural-Tree Plantations with Unmanned Aerial Vehicle (UAV) Technology. PLoS ONE 2015, 10, e0130479. [Google Scholar] [CrossRef]
- de Castro, A.I.; Rallo, P.; Suárez, M.P.; Torres-Sánchez, J.; Casanova, L.; Jiménez-Brenes, F.M.; Morales-Sillero, A.; Jiménez, M.R.; López-Granados, F. High-Throughput System for the Early Quantification of Major Architectural Traits in Olive Breeding Trials Using UAV Images and OBIA Techniques. Front. Plant Sci. 2019, 10, 1472. [Google Scholar] [CrossRef]
- Jiménez-Brenes, F.M.; López-Granados, F.; de Castro, A.I.; Torres-Sánchez, J.; Serrano, N.; Peña, J.M. Quantifying Pruning Impacts on Olive Tree Architecture and Annual Canopy Growth by Using UAV-Based 3D Modelling. Plant Methods 2017, 13, 55. [Google Scholar] [CrossRef] [PubMed]
- Rallo, P.; de Castro, A.I.; López-Granados, F.; Morales-Sillero, A.; Torres-Sánchez, J.; Jiménez, M.R.; Jiménez-Brenes, F.M.; Casanova, L.; Suárez, M.P. Exploring UAV-Imagery to Support Genotype Selection in Olive Breeding Programs. Sci. Hortic. 2020, 273, 109615. [Google Scholar] [CrossRef]
- Torres-Sánchez, J.; de la Rosa, R.; León, L.; Jiménez-Brenes, F.M.; Kharrat, A.; López-Granados, F. Quantification of Dwarfing Effect of Different Rootstocks in ‘Picual’ Olive Cultivar Using UAV-Photogrammetry. Precis. Agric. 2022, 23, 178–193. [Google Scholar] [CrossRef]
- Egea, G.; Padilla-Díaz, C.M.; Martinez-Guanter, J.; Fernández, J.E.; Pérez-Ruiz, M. Assessing a Crop Water Stress Index Derived from Aerial Thermal Imaging and Infrared Thermometry in Super-High Density Olive Orchards. Agric. Water Manag. 2017, 187, 210–221. [Google Scholar] [CrossRef]
- Martinez-Guanter, J.; Agüera, P.; Agüera, J.; Pérez-Ruiz, M. Spray and Economics Assessment of a UAV-Based Ultra-Low-Volume Application in Olive and Citrus Orchards. Precis. Agric. 2020, 21, 226–243. [Google Scholar] [CrossRef]
- Caruso, G.; Palai, G.; Marra, F.P.; Caruso, T. High-Resolution UAV Imagery for Field Olive (Olea europaea L.) Phenotyping. Horticulturae 2021, 7, 258. [Google Scholar] [CrossRef]
- Caruso, G.; Palai, G.; Gucci, R.; Priori, S. Remote and Proximal Sensing Techniques for Site-Specific Irrigation Management in the Olive Orchard. Appl. Sci. 2022, 12, 1309. [Google Scholar] [CrossRef]
- Caruso, G.; Palai, G.; Tozzini, L.; Gucci, R. Using Visible and Thermal Images by an Unmanned Aerial Vehicle to Monitor the Plant Water Status, Canopy Growth and Yield of Olive Trees (Cvs. Frantoio and Leccino) under Different Irrigation Regimes. Agronomy 2022, 12, 1904. [Google Scholar] [CrossRef]
- Caruso, G.; Zarco-Tejada, P.J.; González-Dugo, V.; Moriondo, M.; Tozzini, L.; Palai, G.; Rallo, G.; Hornero, A.; Primicerio, J.; Gucci, R. High-Resolution Imagery Acquired from an Unmanned Platform to Estimate Biophysical and Geometrical Parameters of Olive Trees under Different Irrigation Regimes. PLoS ONE 2019, 14, e0210804. [Google Scholar] [CrossRef]
- Fernández, T.; Pérez, J.L.; Cardenal, J.; Gómez, J.M.; Colomo, C.; Delgado, J. Analysis of Landslide Evolution Affecting Olive Groves Using UAV and Photogrammetric Techniques. Remote Sens. 2016, 8, 837. [Google Scholar] [CrossRef]
- Stateras, D.; Kalivas, D. Assessment of Olive Tree Canopy Characteristics and Yield Forecast Model Using High Resolution UAV Imagery. Agriculture 2020, 10, 385. [Google Scholar] [CrossRef]
- Sarabia, R.; Aquino, A.; Ponce, J.M.; López, G.; Andújar, J.M. Automated Identification of Crop Tree Crowns from UAV Multispectral Imagery by Means of Morphological Image Analysis. Remote Sens. 2020, 12, 748. [Google Scholar] [CrossRef]
- Çoşlu, M.; Sönmez, N.K. Determination of Olive Tree (Olea europaea L.) Some Dendrometric Components from Unmanned Aerial Vehicle (UAV) Data with Local Extrema and Multiresolution Segmentation Algorithms. Ziraat Fakültesi Derg. 2022, 17, 95–103. [Google Scholar] [CrossRef]
- Beniaich, A.; Silva, M.L.N.; Guimarães, D.V.; Avalos, F.A.P.; Terra, F.S.; Menezes, M.D.; Avanzi, J.C.; Cândido, B.M. UAV-Based Vegetation Monitoring for Assessing the Impact of Soil Loss in Olive Orchards in Brazil. Geoderma Reg. 2022, 30, e00543. [Google Scholar] [CrossRef]
- Salamí, E.; Gallardo, A.; Skorobogatov, G.; Barrado, C. On-the-Fly Olive Tree Counting Using a UAS and Cloud Services. Remote Sens. 2019, 11, 316. [Google Scholar] [CrossRef]
- Jorge, J.; Vallbé, M.; Soler, J.A. Detection of Irrigation Inhomogeneities in an Olive Grove Using the NDRE Vegetation Index Obtained from UAV Images. Eur. J. Remote Sens. 2019, 52, 169–177. [Google Scholar] [CrossRef]
- Safonova, A.; Guirado, E.; Maglinets, Y.; Alcaraz-Segura, D.; Tabik, S. Olive Tree Biovolume from UAV Multi-Resolution Image Segmentation with Mask R-CNN. Sensors 2021, 21, 1617. [Google Scholar] [CrossRef]
- Alshammari, H.H.; Shahin, O.R. An Efficient Deep Learning Mechanism for the Recognition of Olive Trees in Jouf Region. Comput. Intell. Neurosci. 2022, 2022, e9249530. [Google Scholar] [CrossRef]
- Papić, V.; Bugarin, N.; Gugić, J. On Olive Groves Analysis Using UAVs. In Proceedings of the 2021 International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Hvar, Croatia, 23–25 September 2021; pp. 1–6. [Google Scholar]
- Marques, P.; Pádua, L.; Sousa, J.; Fernandes-Silva, A. Assessment of UAV Thermal Imagery to Monitor Water Stress in Olive Trees. In Proceedings of the XXI International Horticultural Congress (IHC2022): International Symposium on Water: A Worldwide Challenge for Horticulture! Virtual Conference, 14 August 2022; pp. 157–164. [Google Scholar]
- Ye, Z.; Wei, J.; Lin, Y.; Guo, Q.; Zhang, J.; Zhang, H.; Deng, H.; Yang, K. Extraction of Olive Crown Based on UAV Visible Images and the U2-Net Deep Learning Model. Remote Sens. 2022, 14, 1523. [Google Scholar] [CrossRef]
- Yang, K.; Zhang, H.; Wang, F.; Lai, R. Extraction of Broad-Leaved Tree Crown Based on UAV Visible Images and OBIA-RF Model: A Case Study for Chinese Olive Trees. Remote Sens. 2022, 14, 2469. [Google Scholar] [CrossRef]
- Marin, I.; Gotovac, S.; Papić, V. Individual Olive Tree Detection in RGB Images. In Proceedings of the 2022 International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 22–24 September 2022; pp. 1–6. [Google Scholar]
- Ottoy, S.; Tziolas, N.; Van Meerbeek, K.; Aravidis, I.; Tilkin, S.; Sismanis, M.; Stavrakoudis, D.; Gitas, I.Z.; Zalidis, G.; De Vocht, A. Effects of Flight and Smoothing Parameters on the Detection of Taxus and Olive Trees with UAV-Borne Imagery. Drones 2022, 6, 197. [Google Scholar] [CrossRef]
- Catania, P.; Ferro, M.V.; Roma, E.; Orlando, S.; Vallone, M. Olive Tree Canopy Assessment Based on UAV Multispectral Images. In Proceedings of the AIIA 2022: Biosystems Engineering Towards the Green Deal; Ferro, V., Giordano, G., Orlando, S., Vallone, M., Cascone, G., Porto, S.M.C., Eds.; Springer International Publishing: Cham, Switzerland, 2023; pp. 469–478. [Google Scholar]
- Catania, P.; Roma, E.; Orlando, S.; Vallone, M. Evaluation of Multispectral Data Acquired from UAV Platform in Olive Orchard. Horticulturae 2023, 9, 133. [Google Scholar] [CrossRef]
- Roma, E.; Laudicina, V.A.; Vallone, M.; Catania, P. Application of Precision Agriculture for the Sustainable Management of Fertilization in Olive Groves. Agronomy 2023, 13, 324. [Google Scholar] [CrossRef]
- Roma, E.; Catania, P.; Vallone, M.; Orlando, S. Unmanned Aerial Vehicle and Proximal Sensing of Vegetation Indices in Olive Tree (Olea Europaea). J. Agric. Eng. 2023, 54. [Google Scholar] [CrossRef]
- Dell’Anna, S.; Mansueto, G.; Boccardo, P.; Arco, E. Multi-Spectral Sensors Monitoring of the Epidemic of Xylella Fastidiosa in the Apulia Region. In Proceedings of the 2022 IEEE 21st Mediterranean Electrotechnical Conference (MELECON), Palermo, Italy, 14–16 June 2022; pp. 610–615. [Google Scholar]
- Moreira, B.M.; Goyanes, G.; Pina, P.; Vassilev, O.; Heleno, S. Assessment of the Influence of Survey Design and Processing Choices on the Accuracy of Tree Diameter at Breast Height (DBH) Measurements Using UAV-Based Photogrammetry. Drones 2021, 5, 43. [Google Scholar] [CrossRef]
- Fernández, T.; Gómez-Lopez, J.M.; Pérez-García, J.L.; Cardenal, J.; Delgado, J.; Mata, E.; Sánchez-Gómez, M.; Calero, J.; Tovar-Pescador, J.; Moya, F. Analysis of Gully Erosion in a Catchment Area in Olive Groves Using UAS Photogrammetry Techniques. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, XLIII-B2-2020, 1057–1064. [Google Scholar] [CrossRef]
- Santos-Rufo, A.; Mesas-Carrascosa, F.-J.; García-Ferrer, A.; Meroño-Larriva, J.E. Wavelength Selection Method Based on Partial Least Square from Hyperspectral Unmanned Aerial Vehicle Orthomosaic of Irrigated Olive Orchards. Remote Sens. 2020, 12, 3426. [Google Scholar] [CrossRef]
- Šiljeg, A.; Panđa, L.; Domazetović, F.; Marić, I.; Gašparović, M.; Borisov, M.; Milošević, R. Comparative Assessment of Pixel and Object-Based Approaches for Mapping of Olive Tree Crowns Based on UAV Multispectral Imagery. Remote Sens. 2022, 14, 757. [Google Scholar] [CrossRef]
- Castrignanò, A.; Belmonte, A.; Antelmi, I.; Quarto, R.; Quarto, F.; Shaddad, S.; Sion, V.; Muolo, M.R.; Ranieri, N.A.; Gadaleta, G.; et al. A Geostatistical Fusion Approach Using UAV Data for Probabilistic Estimation of Xylella fastidiosa Subsp. Pauca Infection in Olive Trees. Sci. Total Environ. 2021, 752, 141814. [Google Scholar] [CrossRef]
- Belmonte, A.; Gadaleta, G.; Castrignanò, A. Use of Geostatistics for Multi-Scale Spatial Modeling of Xylella fastidiosa Subsp. Pauca (Xfp) Infection with Unmanned Aerial Vehicle Image. Remote Sens. 2023, 15, 656. [Google Scholar]
- Ortega-Farías, S.; Ortega-Salazar, S.; Poblete, T.; Kilic, A.; Allen, R.; Poblete-Echeverría, C.; Ahumada-Orellana, L.; Zuñiga, M.; Sepúlveda, D. Estimation of Energy Balance Components over a Drip-Irrigated Olive Orchard Using Thermal and Multispectral Cameras Placed on a Helicopter-Based Unmanned Aerial Vehicle (UAV). Remote Sens. 2016, 8, 638. [Google Scholar] [CrossRef]
- Lima-Cueto, F.J.; Blanco-Sepúlveda, R.; Gómez-Moreno, M.L.; Galacho-Jiménez, F.B. Using Vegetation Indices and a UAV Imaging Platform to Quantify the Density of Vegetation Ground Cover in Olive Groves (Olea europaea L.) in Southern Spain. Remote Sens. 2019, 11, 2564. [Google Scholar] [CrossRef]
- Jurado, J.M.; Ortega, L.; Cubillas, J.J.; Feito, F.R. Multispectral Mapping on 3D Models and Multi-Temporal Monitoring for Individual Characterization of Olive Trees. Remote Sens. 2020, 12, 1106. [Google Scholar] [CrossRef]
- Anifantis, A.S.; Camposeo, S.; Vivaldi, G.A.; Santoro, F.; Pascuzzi, S. Comparison of UAV Photogrammetry and 3D Modeling Techniques with Other Currently Used Methods for Estimation of the Tree Row Volume of a Super-High-Density Olive Orchard. Agriculture 2019, 9, 233. [Google Scholar] [CrossRef]
- Sehree, N.A.; Khidhir, A.M. Olive Trees Cases Classification Based on Deep Convolutional Neural Network from Unmanned Aerial Vehicle Imagery. Indones. J. Electr. Eng. Comput. Sci. 2022, 27, 92–101. [Google Scholar]
- Poblete-Echeverria, C.; Sepulveda-Reyes, D.; Ortega-Farias, S.; Zuniga, M.; Fuentes, S. Plant Water Stress Detection Based on Aerial and Terrestrial Infrared Thermography: A Study Case from Vineyard and Olive Orchard. In Proceedings of the XXIX International Horticultural Congress on Horticulture: Sustaining Lives, Livelihoods and Landscapes (IHC2014): 1112, Brisbane, Australia, 17 August 2014; pp. 141–146. [Google Scholar]
- Avola, G.; Di Gennaro, S.F.; Cantini, C.; Riggi, E.; Muratore, F.; Tornambè, C.; Matese, A. Remotely Sensed Vegetation Indices to Discriminate Field-Grown Olive Cultivars. Remote Sens. 2019, 11, 1242. [Google Scholar] [CrossRef]
- Zancanaro, E.; Gertsis, A.; Vellidis, G.; Marinello, F.; Morari, F. Developing Crop Canopy Model for Irrigation of High-Density Olive Groves by Using UAV Imagery. In Precision Agriculture’19; Wageningen Academic Publishers: Wageningen, The Netherlands, 2019; pp. 421–427. ISBN 978-90-8686-337-2. [Google Scholar]
- Guillén-Climent, M.L.; Zarco-Tejada, P.J.; Villalobos, F.J. Estimating Radiation Interception in an Olive Orchard Using Physical Models and Multispectral Airborne Imagery. Isr. J. Plant Sci. 2012, 60, 107–121. [Google Scholar] [CrossRef]
- Karydas, C.; Gewehr, S.; Iatrou, M.; Iatrou, G.; Mourelatos, S. Olive Plantation Mapping on a Sub-Tree Scale with Object-Based Image Analysis of Multispectral UAV Data; Operational Potential in Tree Stress Monitoring. J. Imaging 2017, 3, 57. [Google Scholar] [CrossRef]
- Marques, P.; Pádua, L.; Brito, T.; Sousa, J.J.; Fernandes-Silva, A. Monitoring of Olive Trees Temperatures under Different Irrigation Strategies by UAV Thermal Infrared Imagery. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 4550–4553. [Google Scholar]
- Iatrou, G.; Mourelatos, S.; Zartaloudis, Z.; Iatrou, M.; Gewehr, S.; Kalaitzopoulou, S. Remote Sensing for the Management of Verticillium Wilt of Olive. Fresenius Environ. Bull. 2016, 25, 3622–3628. [Google Scholar]
- Šiljeg, A.; Marinović, R.; Domazetović, F.; Jurišić, M.; Marić, I.; Panđa, L.; Radočaj, D.; Milošević, R. GEOBIA and Vegetation Indices in Extracting Olive Tree Canopies Based on Very High-Resolution UAV Multispectral Imagery. Appl. Sci. 2023, 13, 739. [Google Scholar] [CrossRef]
- Moorthy, I.; Miller, J.R.; Berni, J.A.J.; Zarco-Tejada, P.; Hu, B.; Chen, J. Field Characterization of Olive (Olea europaea L.) Tree Crown Architecture Using Terrestrial Laser Scanning Data. Agric. For. Meteorol. 2011, 151, 204–214. [Google Scholar] [CrossRef]
- Melesse, A.M.; Weng, Q.; Thenkabail, P.S.; Senay, G.B. Remote Sensing Sensors and Applications in Environmental Resources Mapping and Modelling. Sensors 2007, 7, 3209–3241. [Google Scholar] [CrossRef] [PubMed]
- Toth, C.; Jóźków, G. Remote Sensing Platforms and Sensors: A Survey. ISPRS J. Photogramm. Remote Sens. 2016, 115, 22–36. [Google Scholar] [CrossRef]
- Austin, R. Unmanned Aircraft Systems: UAVS Design, Development and Deployment; John Wiley & Sons: Hoboken, NJ, USA, 2011; Volume 54, ISBN 1-119-96426-1. [Google Scholar]
- Curran, P. Multispectral Remote Sensing of Vegetation Amount. Prog. Phys. Geogr. Earth Environ. 1980, 4, 315–341. [Google Scholar] [CrossRef]
- Gerhards, M.; Schlerf, M.; Mallick, K.; Udelhoven, T. Challenges and Future Perspectives of Multi-/Hyperspectral Thermal Infrared Remote Sensing for Crop Water-Stress Detection: A Review. Remote Sens. 2019, 11, 1240. [Google Scholar] [CrossRef]
- Khanal, S.; Fulton, J.; Shearer, S. An Overview of Current and Potential Applications of Thermal Remote Sensing in Precision Agriculture. Comput. Electron. Agric. 2017, 139, 22–32. [Google Scholar] [CrossRef]
- Lee, W.S.; Alchanatis, V.; Yang, C.; Hirafuji, M.; Moshou, D.; Li, C. Sensing Technologies for Precision Specialty Crop Production. Comput. Electron. Agric. 2010, 74, 2–33. [Google Scholar] [CrossRef]
- Koenig, K.; Höfle, B.; Hämmerle, M.; Jarmer, T.; Siegmann, B.; Lilienthal, H. Comparative Classification Analysis of Post-Harvest Growth Detection from Terrestrial LiDAR Point Clouds in Precision Agriculture. ISPRS J. Photogramm. Remote Sens. 2015, 104, 112–125. [Google Scholar] [CrossRef]
- Padmavathi, K.; Thangadurai, K. Implementation of RGB and Grayscale Images in Plant Leaves Disease Detection—Comparative Study. Indian J. Sci. Technol. 2016, 9, 1–6. [Google Scholar] [CrossRef]
- Zhao, T.; Stark, B.; Chen, Y.; Ray, A.L.; Doll, D. Challenges in Water Stress Quantification Using Small Unmanned Aerial System (sUAS): Lessons from a Growing Season of Almond. J. Intell. Robot. Syst. 2017, 88, 721–735. [Google Scholar] [CrossRef]
- Calderón, R.; Navas-Cortés, J.A.; Lucena, C.; Zarco-Tejada, P.J. High-Resolution Airborne Hyperspectral and Thermal Imagery for Early Detection of Verticillium Wilt of Olive Using Fluorescence, Temperature and Narrow-Band Spectral Indices. Remote Sens. Environ. 2013, 139, 231–245. [Google Scholar] [CrossRef]
- Deane, S.; Avdelidis, N.P.; Ibarra-Castanedo, C.; Zhang, H.; Nezhad, H.Y.; Williamson, A.A.; Mackley, T.; Maldague, X.; Tsourdos, A.; Nooralishahi, P. Comparison of Cooled and Uncooled IR Sensors by Means of Signal-to-Noise Ratio for NDT Diagnostics of Aerospace Grade Composites. Sensors 2020, 20, 3381. [Google Scholar] [CrossRef]
- Omidi, R.; Moghimi, A.; Pourreza, A.; El-Hadedy, M.; Eddin, A.S. Ensemble Hyperspectral Band Selection for Detecting Nitrogen Status in Grape Leaves. In Proceedings of the 2020 19th IEEE International Conference on Machine Learning and Applications (ICMLA), Miami, FL, USA, 14–17 December 2020; pp. 286–293. [Google Scholar]
- Morsy, S.; Shaker, A.; El-Rabbany, A. Multispectral LiDAR Data for Land Cover Classification of Urban Areas. Sensors 2017, 17, 958. [Google Scholar] [CrossRef]
- Hugenholtz, C.H.; Whitehead, K.; Brown, O.W.; Barchyn, T.E.; Moorman, B.J.; LeClair, A.; Riddell, K.; Hamilton, T. Geomorphological Mapping with a Small Unmanned Aircraft System (sUAS): Feature Detection and Accuracy Assessment of a Photogrammetrically-Derived Digital Terrain Model. Geomorphology 2013, 194, 16–24. [Google Scholar] [CrossRef]
- Whitehead, K.; Moorman, B.J.; Hugenholtz, C.H. Low-Cost, on-Demand Aerial Photogrammetry for Glaciological Measurement. Cryosphere Discuss. 2013, 7, 3043–3057. [Google Scholar]
- Haala, N.; Cramer, M.; Weimer, F.; Trittler, M. Performance Test on Uav-Based Photogrammetric Data Collection. ISPRS—Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, 3822, 7–12. [Google Scholar] [CrossRef]
- Zhang, Y.; Xiong, J.; Hao, L. Photogrammetric Processing of Low-altitude Images Acquired by Unpiloted Aerial Vehicles. Photogramm. Rec. 2011, 134, 190–211. [Google Scholar] [CrossRef]
- Crommelinck, S.; Bennett, R.; Gerke, M.; Nex, F.; Yang, M.Y.; Vosselman, G. Review of Automatic Feature Extraction from High-Resolution Optical Sensor Data for UAV-Based Cadastral Mapping. Remote Sens. 2016, 8, 689. [Google Scholar] [CrossRef]
- Jay, S.; Rabatel, G.; Hadoux, X.; Moura, D.; Gorretta, N. In-Field Crop Row Phenotyping from 3D Modeling Performed Using Structure from Motion. Comput. Electron. Agric. 2015, 110, 70–77. [Google Scholar] [CrossRef]
- Arefi, H.; d’Angelo, P.; Mayer, H.; Reinartz, P. Automatic Generation of Digital Terrain Models from Cartosat-1 Stereo Images; Heipke, C., Jacobsen, K., Müller, S., Sörgel, U., Eds.; ISPRS: Hannover, Germany, 2009; Volume 83, pp. 1–6. [Google Scholar]
- Turner, D.; Lucieer, A.; Wallace, L. Direct Georeferencing of Ultrahigh-Resolution UAV Imagery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2738–2745. [Google Scholar] [CrossRef]
- Hamuda, E.; Glavin, M.; Jones, E. A Survey of Image Processing Techniques for Plant Extraction and Segmentation in the Field. Comput. Electron. Agric. 2016, 125, 184–199. [Google Scholar] [CrossRef]
- Shinde, P.P.; Shah, S. A Review of Machine Learning and Deep Learning Applications; IEEE: Piscataway, NJ, USA, 2018; pp. 1–6. [Google Scholar]
- Marques, P.; Pádua, L.; Adão, T.; Hruška, J.; Peres, E.; Sousa, A.; Sousa, J.J. UAV-Based Automatic Detection and Monitoring of Chestnut Trees. Remote Sens. 2019, 11, 855. [Google Scholar] [CrossRef]
- Rasmussen, J.; Ntakos, G.; Nielsen, J.; Svensgaard, J.; Poulsen, R.N.; Christensen, S. Are Vegetation Indices Derived from Consumer-Grade Cameras Mounted on UAVs Sufficiently Reliable for Assessing Experimental Plots? Eur. J. Agron. 2016, 74, 75–92. [Google Scholar] [CrossRef]
- Woebbecke, D.M.; Meyer, G.E.; Von Bargen, K.; Mortensen, D. Color Indices for Weed Identification under Various Soil, Residue, and Lighting Conditions. Trans. ASAE 1995, 38, 259–269. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Kaufman, Y.J.; Stark, R.; Rundquist, D. Novel Algorithms for Remote Estimation of Vegetation Fraction. Remote Sens. Environ. 2002, 80, 76–87. [Google Scholar] [CrossRef]
- Salamí, E.; Barrado, C.; Pastor, E. UAV Flight Experiments Applied to the Remote Sensing of Vegetated Areas. Remote Sens. 2014, 6, 11051–11081. [Google Scholar] [CrossRef]
- Dunford, R.; Michel, K.; Gagnage, M.; Piégay, H. Potential and Constraints of Unmanned Aerial Vehicle Technology for the Characterization of Mediterranean Riparian Forest. Int. J. Remote Sens. 2009, 30, 4915–4935. [Google Scholar] [CrossRef]
- Hung, C.; Bryson, M.; Sukkarieh, S. Multi-Class Predictive Template for Tree Crown Detection. ISPRS J. Photogramm. Remote Sens. 2012, 68, 170–183. [Google Scholar] [CrossRef]
- Sugiura, R.; Noguchi, N.; Ishii, K. Remote-Sensing Technology for Vegetation Monitoring Using an Unmanned Helicopter. Biosyst. Eng. 2005, 90, 369–379. [Google Scholar] [CrossRef]
- Baluja, J.; Diago, M.P.; Balda, P.; Zorer, R.; Meggio, F.; Morales, F.; Tardaguila, J. Assessment of Vineyard Water Status Variability by Thermal and Multispectral Imagery Using an Unmanned Aerial Vehicle (UAV). Irrig. Sci. 2012, 30, 511–522. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; González-Dugo, V.; Berni, J.A.J. Fluorescence, Temperature and Narrow-Band Indices Acquired from a UAV Platform for Water Stress Detection Using a Micro-Hyperspectral Imager and a Thermal Camera. Remote Sens. Environ. 2012, 117, 322–337. [Google Scholar] [CrossRef]
- Zecha, C.W.; Link, J.; Claupein, W. Mobile Sensor Platforms: Categorisation and Research Applications in Precision Farming. J. Sens. Sens. Syst. 2013, 2, 51–72. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; Watson, C. An Automated Technique for Generating Georectified Mosaics from Ultra-High Resolution Unmanned Aerial Vehicle (UAV) Imagery, Based on Structure from Motion (SfM) Point Clouds. Remote Sens. 2012, 4, 1392–1410. [Google Scholar] [CrossRef]
- Martínez-Ruedas, C.; Yanes Luis, S.; Díaz-Cabrera, J.M.; Gutiérrez Reina, D.; Galvín, A.P.; Castillejo-González, I.L. Convolutional Neural Networks for Planting System Detection of Olive Groves. In Innovations in Machine and Deep Learning: Case Studies and Applications; Rivera, G., Rosete, A., Dorronsoro, B., Rangel-Valdez, N., Eds.; Studies in Big Data; Springer Nature: Cham, Switzerland, 2023; pp. 373–399. ISBN 978-3-031-40688-1. [Google Scholar]
- Hossain, M.D.; Chen, D. Segmentation for Object-Based Image Analysis (OBIA): A Review of Algorithms and Challenges from Remote Sensing Perspective. ISPRS J. Photogramm. Remote Sens. 2019, 150, 115–134. [Google Scholar] [CrossRef]
- Chen, X.; Ishwaran, H. Random Forests for Genomic Data Analysis. Genomics 2012, 99, 323–329. [Google Scholar] [CrossRef]
- Mountrakis, G.; Im, J.; Ogole, C. Support Vector Machines in Remote Sensing: A Review. ISPRS J. Photogramm. Remote Sens. 2011, 66, 247–259. [Google Scholar] [CrossRef]
- Waleed, M.; Um, T.-W.; Khan, A.; Ahmad, Z. An Automated Method for Detection and Enumeration of Olive Trees through Remote Sensing. IEEE Access 2020, 8, 108592–108601. [Google Scholar] [CrossRef]
- Khan, A.; Khan, U.; Waleed, M.; Khan, A.; Kamal, T.; Marwat, S.N.K.; Maqsood, M.; Aadil, F. Remote Sensing: An Automated Methodology for Olive Tree Detection and Counting in Satellite Images. IEEE Access 2018, 6, 77816–77828. [Google Scholar] [CrossRef]
- Kotsiantis, S.B. Decision Trees: A Recent Overview. Artif. Intell. Rev. 2013, 39, 261–283. [Google Scholar] [CrossRef]
- Waleed, M.; Um, T.-W.; Khan, A.; Khan, U. Automatic Detection System of Olive Trees Using Improved K-Means Algorithm. Remote Sens. 2020, 12, 760. [Google Scholar] [CrossRef]
- Sutton, C.; McCallum, A. An Introduction to Conditional Random Fields. Found. Trends® Mach. Learn. 2012, 4, 267–373. [Google Scholar] [CrossRef]
- Abozeid, A.; Alanazi, R.; Elhadad, A.; Taloba, A.I.; Abd El-Aziz, R.M. A Large-Scale Dataset and Deep Learning Model for Detecting and Counting Olive Trees in Satellite Imagery. Comput. Intell. Neurosci. 2022, 2022, e1549842. [Google Scholar] [CrossRef] [PubMed]
- Martínez-Ruedas, C.; Yanes-Luis, S.; Díaz-Cabrera, J.M.; Gutiérrez-Reina, D.; Linares-Burgos, R.; Castillejo-González, I.L. Detection of Planting Systems in Olive Groves Based on Open-Source, High-Resolution Images and Convolutional Neural Networks. Agronomy 2022, 12, 2700. [Google Scholar] [CrossRef]
- Chemin, Y.H.; Beck, P.S.A. A Method to Count Olive Trees in Heterogenous Plantations from Aerial Photographs. Preprints 2017, 2017100170. [Google Scholar] [CrossRef]
- Peña-Barragán, J.M.; Jurado-Expósito, M.; López-Granados, F.; Atenciano, S.; Sánchez-de la Orden, M.; García-Ferrer, A.; García-Torres, L. Assessing Land-Use in Olive Groves from Aerial Photographs. Agric. Ecosyst. Environ. 2004, 103, 117–122. [Google Scholar] [CrossRef]
- Sepulcre-Cantó, G.; Zarco-Tejada, P.J.; Sobrino, J.A.; Berni, J.A.J.; Jiménez-Muñoz, J.C.; Gastellu-Etchegorry, J.P. Discriminating Irrigated and Rainfed Olive Orchards with Thermal ASTER Imagery and DART 3D Simulation. Agric. For. Meteorol. 2009, 149, 962–975. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Kaufman, Y.J.; Merzlyak, M.N. Use of a Green Channel in Remote Sensing of Global Vegetation from EOS-MODIS. Remote Sens. Environ. 1996, 58, 289–298. [Google Scholar] [CrossRef]
- Idso, S.B.; Jackson, R.D.; Pinter, P.J.; Reginato, R.J.; Hatfield, J.L. Normalizing the Stress-Degree-Day Parameter for Environmental Variability. Agric. Meteorol. 1981, 24, 45–55. [Google Scholar] [CrossRef]
- Daughtry, C.S.T.; Walthall, C.L.; Kim, M.S.; de Colstoun, E.B.; McMurtrey, J.E. Estimating Corn Leaf Chlorophyll Concentration from Leaf and Canopy Reflectance. Remote Sens. Environ. 2000, 74, 229–239. [Google Scholar] [CrossRef]
- Broge, N.H.; Leblanc, E. Comparing Prediction Power and Stability of Broadband and Hyperspectral Vegetation Indices for Estimation of Green Leaf Area Index and Canopy Chlorophyll Density. Remote Sens. Environ. 2001, 76, 156–172. [Google Scholar] [CrossRef]
- Ben-Gal, A.; Agam, N.; Alchanatis, V.; Cohen, Y.; Yermiyahu, U.; Zipori, I.; Presnov, E.; Sprintsin, M.; Dag, A. Evaluating Water Stress in Irrigated Olives: Correlation of Soil Water Status, Tree Water Status, and Thermal Imagery. Irrig. Sci. 2009, 27, 367–376. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; Diaz-Varela, R.; Angileri, V.; Loudjani, P. Tree Height Quantification Using Very High Resolution Imagery Acquired from an Unmanned Aerial Vehicle (UAV) and Automatic 3D Photo-Reconstruction Methods. Eur. J. Agron. 2014, 55, 89–99. [Google Scholar] [CrossRef]
- Díaz-Varela, R.; de la Rosa, R.; León, L.; Zarco-Tejada, P. High-Resolution Airborne UAV Imagery to Assess Olive Tree Crown Parameters Using 3D Photo Reconstruction: Application in Breeding Trials. Remote Sens. 2015, 7, 4213–4232. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; Miller, J.R.; Morales, A.; Berjón, A.; Agüera, J. Hyperspectral Indices and Model Simulation for Chlorophyll Estimation in Open-Canopy Tree Crops. Remote Sens. Environ. 2004, 90, 463–476. [Google Scholar] [CrossRef]
- Estornell, J.; Ruiz, L.A.; Velázquez-Martí, B.; López-Cortés, I.; Salazar, D.; Fernández-Sarría, A. Estimation of Pruning Biomass of Olive Trees Using Airborne Discrete-Return LiDAR Data. Biomass Bioenergy 2015, 81, 315–321. [Google Scholar] [CrossRef]
- Hadaś, E.; Estornell, J. Accuracy of Tree Geometric Parameters Depending on the LiDAR Data Density. Eur. J. Remote Sens. 2016, 49, 73–92. [Google Scholar] [CrossRef]
- Reyes-González, A.; Kjaersgaard, J.; Trooien, T.; Hay, C.; Ahiablame, L. Comparative Analysis of METRIC Model and Atmometer Methods for Estimating Actual Evapotranspiration. Int. J. Agron. 2017, 2017, e3632501. [Google Scholar] [CrossRef]
- Ramírez-Cuesta, J.M.; Allen, R.G.; Zarco-Tejada, P.J.; Kilic, A.; Santos, C.; Lorite, I.J. Impact of the Spatial Resolution on the Energy Balance Components on an Open-Canopy Olive Orchard. Int. J. Appl. Earth Obs. Geoinf. 2019, 74, 88–102. [Google Scholar] [CrossRef]
- Cammalleri, C.; Anderson, M.C.; Ciraolo, G.; D’Urso, G.; Kustas, W.P.; La Loggia, G.; Minacapilli, M. Applications of a Remote Sensing-Based Two-Source Energy Balance Algorithm for Mapping Surface Fluxes without in Situ Air Temperature Observations. Remote Sens. Environ. 2012, 124, 502–515. [Google Scholar] [CrossRef]
- Cammalleri, C.; Ciraolo, G.; Minacapilli, M.; Rallo, G. Evapotranspiration from an Olive Orchard Using Remote Sensing-Based Dual Crop Coefficient Approach. Water Resour. Manag. 2013, 27, 4877–4895. [Google Scholar] [CrossRef]
- Cawse-Nicholson, K.; Braverman, A.; Kang, E.L.; Li, M.; Johnson, M.; Halverson, G.; Anderson, M.; Hain, C.; Gunson, M.; Hook, S. Sensitivity and Uncertainty Quantification for the ECOSTRESS Evapotranspiration Algorithm—DisALEXI. Int. J. Appl. Earth Obs. Geoinf. 2020, 89, 102088. [Google Scholar] [CrossRef]
- Norman, J.M.; Kustas, W.P.; Humes, K.S. Source Approach for Estimating Soil and Vegetation Energy Fluxes in Observations of Directional Radiometric Surface Temperature. Agric. For. Meteorol. 1995, 77, 263–293. [Google Scholar] [CrossRef]
- Minacapilli, M.; Agnese, C.; Blanda, F.; Cammalleri, C.; Ciraolo, G.; D’Urso, G.; Iovino, M.; Pumo, D.; Provenzano, G.; Rallo, G. Estimation of Actual Evapotranspiration of Mediterranean Perennial Crops by Means of Remote-Sensing Based Surface Energy Balance Models. Hydrol. Earth Syst. Sci. 2009, 13, 1061–1074. [Google Scholar] [CrossRef]
- Riveros-Burgos, C.; Ortega-Farías, S.; Morales-Salinas, L.; Fuentes-Peñailillo, F.; Tian, F. Assessment of the Clumped Model to Estimate Olive Orchard Evapotranspiration Using Meteorological Data and UAV-Based Thermal Infrared Imagery. Irrig. Sci. 2021, 39, 63–80. [Google Scholar] [CrossRef]
- Kaufman, Y.J.; Tanre, D. Atmospherically Resistant Vegetation Index (ARVI) for EOS-MODIS. IEEE Trans. Geosci. Remote Sens. 1992, 30, 261–270. [Google Scholar] [CrossRef]
- Rondeaux, G.; Steven, M.; Baret, F. Optimization of Soil-Adjusted Vegetation Indices. Remote Sens. Environ. 1996, 55, 95–107. [Google Scholar] [CrossRef]
- Di Nisio, A.; Adamo, F.; Acciani, G.; Attivissimo, F. Fast Detection of Olive Trees Affected by Xylella Fastidiosa from UAVs Using Multispectral Imaging. Sensors 2020, 20, 4915. [Google Scholar] [CrossRef]
- Gamon, J.A.; Peñuelas, J.; Field, C.B. A Narrow-Waveband Spectral Index That Tracks Diurnal Changes in Photosynthetic Efficiency. Remote Sens. Environ. 1992, 41, 35–44. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; Berjón, A.; López-Lozano, R.; Miller, J.R.; Martín, P.; Cachorro, V.; González, M.R.; de Frutos, A. Assessing Vineyard Condition with Hyperspectral Indices: Leaf and Canopy Reflectance Simulation in a Row-Structured Discontinuous Canopy. Remote Sens. Environ. 2005, 99, 271–287. [Google Scholar] [CrossRef]
- Ksibi, A.; Ayadi, M.; Soufiene, B.O.; Jamjoom, M.M.; Ullah, Z. MobiRes-Net: A Hybrid Deep Learning Model for Detecting and Classifying Olive Leaf Diseases. Appl. Sci. 2022, 12, 10278. [Google Scholar] [CrossRef]
- Wang, Q.; Nuske, S.; Bergerman, M.; Singh, S. Automated Crop Yield Estimation for Apple Orchards. In Experimental Robotics: The 13th International Symposium on Experimental Robotics; Desai, J.P., Dudek, G., Khatib, O., Kumar, V., Eds.; Springer Tracts in Advanced Robotics; Springer International Publishing: Berline/Heidelberg, Germany, 2013; pp. 745–758. ISBN 978-3-319-00065-7. [Google Scholar]
- Azpiroz, I.; Oses, N.; Quartulli, M.; Olaizola, I.G.; Guidotti, D.; Marchi, S. Comparison of Climate Reanalysis and Remote-Sensing Data for Predicting Olive Phenology through Machine-Learning Methods. Remote Sens. 2021, 13, 1224. [Google Scholar] [CrossRef]
- Sghaier, A.; Dhaou, H.; Jarray, L.; Abaab, Z.; Sekrafi, A.; Ouessar, M. Assessment of Drought Stress in Arid Olive Groves Using HidroMORE Model. J. Agric. Eng. 2022, 53. [Google Scholar] [CrossRef]
- Weissteiner, C.J.; Strobl, P.; Sommer, S. Assessment of Status and Trends of Olive Farming Intensity in EU-Mediterranean Countries Using Remote Sensing Time Series and Land Cover Data. Ecol. Indic. 2011, 11, 601–610. [Google Scholar] [CrossRef]
- Hadas, E.; Borkowski, A.; Estornell, J.; Tymkow, P. Automatic Estimation of Olive Tree Dendrometric Parameters Based on Airborne Laser Scanning Data Using Alpha-Shape and Principal Component Analysis. GIScience Remote Sens. 2017, 54, 898–917. [Google Scholar] [CrossRef]
- Agam, N.; Cohen, Y.; Berni, J.A.J.; Alchanatis, V.; Kool, D.; Dag, A.; Yermiyahu, U.; Ben-Gal, A. An Insight to the Performance of Crop Water Stress Index for Olive Trees. Agric. Water Manag. 2013, 118, 79–86. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Database | Website | Query |
|---|---|---|
| Scopus | https://www.scopus.com/home.uri (accessed on 17 November 2023) | TITLE-ABS-KEY (olive OR olea) AND TITLE-ABS-KEY (“remote sensing” OR UAV OR satellite OR Sentinel OR MODIS OR “unmanned aerial vehicle” OR aircraft OR LANDSAT) AND (LIMIT-TO (DOCTYPE,”ar”) OR LIMIT-TO (DOCTYPE,”cp”) OR LIMIT-TO (DOCTYPE,”ch”)) |
| Web of Science | https://www.webofscience.com (accessed on 17 November 2023) | TI = (olive OR olea) AND TI = (“remote sensing” OR uav OR satellite OR sentinel OR modis OR “unmanned aerial vehicle” OR aircraft OR landsat) OR AB = (olive OR olea) AND AB = (“remote sensing” OR uav OR satellite OR sentinel OR modis OR “unmanned aerial vehicle” OR aircraft OR landsat) OR AK = (olive OR olea) AND AK = (“remote sensing” OR uav OR satellite OR sentinel OR modis OR “unmanned aerial vehicle” OR aircraft OR landsat) OR KP = (olive OR olea) AND KP = (“remote sensing” OR uav OR satellite OR sentinel OR modis OR “unmanned aerial vehicle” OR aircraft OR landsat) |
| Class | Subclass Type |
|---|---|
| Platform | Satellite (103), UAV (88), aircraft (33) and terrestrial (6) |
| Sensor | RGB (182), MSP (145), TIR (58), HSP (18) and LiDAR (7) |
| Application category | Inventory (72), irrigation management and water stress indicator estimation (34), biophysical parameter estimation (49), crop evapotranspiration and crop coefficient estimation (26), disease detection/monitoring (22), yield estimation (10) and others (19). |
| Mission | Launch Year | Availability | Price per km2 (EUR) | No. of Bands | Spectral Range (nm) | Spatial Resolution (m) | Swath Width at Nadir (km) | Study References |
|---|---|---|---|---|---|---|---|---|
| Landsat-5 * | 1984 | Free | - | 7 | 450–12,500 | 30–120 | 185 | [50,51,52,53,54,55,56] |
| IRS-1D * | 1997 | Collaborative | - | 4 | 520–1750 | 23–70 | 70 | [57,58,59] |
| Landsat-7 | 1999 | Free | - | 8 | 450–12,500 | 15–60 | 185 | [50,51,52,53,54,55,56,57,60,61,62,63,64,65,66,67] |
| IKONOS * | 1999 | Commercial | 9 | 5 | 445–929 | 0.8–4 | 11.3 | [60,68,69,70,71] |
| Terra/Aqua | 1999 | Free | - | 36 | 405–14,385 | 250–1000 | 2300 | [27,54,60,72,73,74,75,76,77,78] |
| Quickbird * | 2001 | Commercial | 14 | 5 | 450–900 | 0.6–2.6 | 16.8 | [34,79,80,81,82,83,84,85] |
| Formosat-2 * | 2004 | Collaborative | 1.5 | 5 | 450–900 | 2–8 | 24 | [53] |
| RapidEye * | 2008 | Commercial | 1.1 | 5 | 440–850 | 5–6.5 | 77 | [86] |
| WorldView-2 | 2009 | Commercial | 15.7 | 9 | 450–800 | 0.5–1.8 | 16.4 | [25,87,88,89,90] |
| Pleiades-1 | 2011 | Commercial | 11.2 | 5 | 430–950 | 0.5–2 | 20 | [46,87,91] |
| Landsat-8 | 2013 | Free | - | 9 | 430–1390 | 15–100 | 185 | [23,52,54,64,69,72,73,92,93,94] |
| SPOT-7 | 2014 | Commercial | 4.2 | 5 | 450–890 | 1.5–6 | 60 | [95] |
| WorldView-3 | 2014 | Commercial | 20.2 | 29 | 400–2365 | 0.3–30 | 13.1 | [88,89,96,97] |
| Sentinel-2 | 2015 | Free | - | 13 | 443–2190 | 10–60 | 290 | [15,16,18,24,47,91,93,98,99,100,101,102,103,104,105,106,107,108,109,110,111,112,113,114,115,116,117,118,119,120,121,122] |
| PlanetScope | 2016 | Commercial | 2 | 8 | 431–885 | 3–4.1 | 25 | [86,88,102,120,121,123] |
| PRISMA | 2019 | Collaborative | - | 250 | 400–2500 | 5–30 | 30 | [111] |
| Wing Type | Model | Release Year | Maximum Payload (g) | Autonomy (min) | Sensors Used | Study References |
|---|---|---|---|---|---|---|
| Rotary | Microdones MD4-1000 | 2010 | 1200 | 45 | RGB and MSP | [134,135,136,137,138,139] |
| DJI S800 | 2012 | 2500 | 16 | RGB | [33] | |
| DJI Phantom 2 | 2013 | 1300 | 25 | RGB and TIR | [140] | |
| DJI S1000 | 2014 | 6000 | 15 | RGB, MSP and TIR | [141,142,143,144,145] | |
| G4 Robot | 2014 | 2300 | 28 | RGB and MSP | [17] | |
| AscTec Falcon 8 | 2014 | 800 | 26 | RGB and MSP | [146] | |
| ATyges FV-8 | 2014 | 1500 | 30 | RGB and MSP | [146] | |
| DJI Matrice 100 | 2015 | 1000 | 40 | RGB and MSP | [19,20,147,148] | |
| DJI Phantom 3 | 2015 | 1000 | 25 | RGB and MSP | [149,150] | |
| DJI Phantom 4 | 2016 | 500 | 30 | RGB and MSP | [19,22,151,152,153,154,155,156,157,158,159,160,161,162,163,164,165,166,167] | |
| DJI Matrice 600 Pro | 2016 | 6000 | 38 | RGB, MSP and HSP | [97,168,169] | |
| DJI Mavic Pro | 2016 | 1200 | 21 | RGB, MSP and HSP | [29,154,168,170,171] | |
| Mikrokopter MK8-2500 | 2016 | 2500 | 40 | MSP and TIR | [172] | |
| Parrot Bluegrass | 2017 | 1000 | 25 | RGB and MSP | [173] | |
| DJI Matrice 210 | 2017 | 2300 | 38 | RGB and MSP | [169,174] | |
| DJI Spark | 2017 | N.S. | 16 | RGB | [32,175] | |
| DJI Mavic Pro 2 | 2018 | 900 | 30 | RGB and TIR | [28,155] | |
| DJI Mavic Air 2 | 2020 | 800 | 34 | RGB | [176] | |
| Modified UAV | N.S. | N.S. | N.S. | RGB, MSP and TIR | [177,178,179,180] | |
| Fixed | senseFly eBee | 2013 | 800 | 50 | MSP | [14,22,156,181,182,183] |
| Parrot DiscoPro AG | 2017 | 700 | 30 | RGB | [153] | |
| Trinity F90+ | 2018 | 700 | 90 | RGB and MSP | [184] |
| Performance Metrics | Satellite | Aircraft | UAV | Terrestrial |
|---|---|---|---|---|
| Coverage area | Worldwide | Regional | Local | Sub-Local |
| Spatial resolution | Low | Medium | High | Very high |
| Cloud sensitivity | High | High | Low | None |
| Deployability | Complex | Moderate | Low | Low |
| Availability | Low | Medium | High | High |
| Accuracy | Low | Medium | High | High |
| Performance Metrics | RGB | MSP | TIR | HSP | LiDAR |
|---|---|---|---|---|---|
| Cost | Low | Medium | Medium | High | High |
| Operational principle | Passive | Passive | Passive | Passive | Active |
| Atmospheric interference | Minimal | Moderate | High | High | Minimal |
| Wavelength range (nm) | 400–700 | 400–1000 | 8000–14,000 | 400–2500 | 905–1550 |
| No. of bands | 3 | 3–10 | 1 | >100 | N.A. |
| Band narrowness | Broad | Narrow | Broad | Very narrow | N.A. |
| Band structure | Discrete | Discrete | Discrete | Contiguous | N.A. |
| Pixel size | Small | Small–Moderate | Moderate–Large | Small–Moderate | N.A. |
| Country | Number of Studies | Production | Plantation Harvested | ||
|---|---|---|---|---|---|
| Quantity (t) | Global (%) | Area (ha) | Global (%) | ||
| Spain | 70 | 8,256,550 | 35.1 | 2,623,290 | 25.4 |
| Italy | 51 | 2,270,630 | 9.7 | 1,129,000 | 10.9 |
| Greece | 21 | 3,045,100 | 13.0 | 826,390 | 8.0 |
| Tunisia | 18 | 700,000 | 3.0 | 1,251,313 | 12.1 |
| Portugal | 11 | 1,375,750 | 5.9 | 380,410 | 3.7 |
| Chile | 8 | 130,344 | 0.6 | 21,364 | 0.2 |
| Turkey | 7 | 1,738,680 | 7.4 | 889,168 | 8.6 |
| Saudi Arabia | 6 | 382,105 | 1.6 | 31,864 | 0.3 |
| Croatia | 6 | 23,870 | 0.1 | 19,940 | 0.2 |
| Morocco | 4 | 1,590,504 | 6.8 | 1,104,083 | 10.7 |
| Israel | 4 | 70,000 | 0.3 | 33,700 | 0.3 |
| Australia | 3 | 115,962 | 0.5 | 47,837 | 0.5 |
| France | 3 | 27,560 | 0.1 | 17,010 | 0.2 |
| Iran | 3 | 78,235 | 0.3 | 24,397 | 0.2 |
| China | 2 | 2619 | 0.01 | 315 | 0.003 |
| Brazil | 1 | 3417 | 0.01 | 2121 | 0.02 |
| Iraq | 1 | 33,314 | 0.1 | 8033 | 0.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marques, P.; Pádua, L.; Sousa, J.J.; Fernandes-Silva, A. Advancements in Remote Sensing Imagery Applications for Precision Management in Olive Growing: A Systematic Review. Remote Sens. 2024, 16, 1324. https://doi.org/10.3390/rs16081324
Marques P, Pádua L, Sousa JJ, Fernandes-Silva A. Advancements in Remote Sensing Imagery Applications for Precision Management in Olive Growing: A Systematic Review. Remote Sensing. 2024; 16(8):1324. https://doi.org/10.3390/rs16081324
Chicago/Turabian StyleMarques, Pedro, Luís Pádua, Joaquim J. Sousa, and Anabela Fernandes-Silva. 2024. "Advancements in Remote Sensing Imagery Applications for Precision Management in Olive Growing: A Systematic Review" Remote Sensing 16, no. 8: 1324. https://doi.org/10.3390/rs16081324
APA StyleMarques, P., Pádua, L., Sousa, J. J., & Fernandes-Silva, A. (2024). Advancements in Remote Sensing Imagery Applications for Precision Management in Olive Growing: A Systematic Review. Remote Sensing, 16(8), 1324. https://doi.org/10.3390/rs16081324