
Joint Implementation Method for Clutter Suppression and Coherent Maneuvering Target Detection Based on Sub-Aperture Processing with Airborne Bistatic Radar
 ,
,
Abstract
:1. Introduction
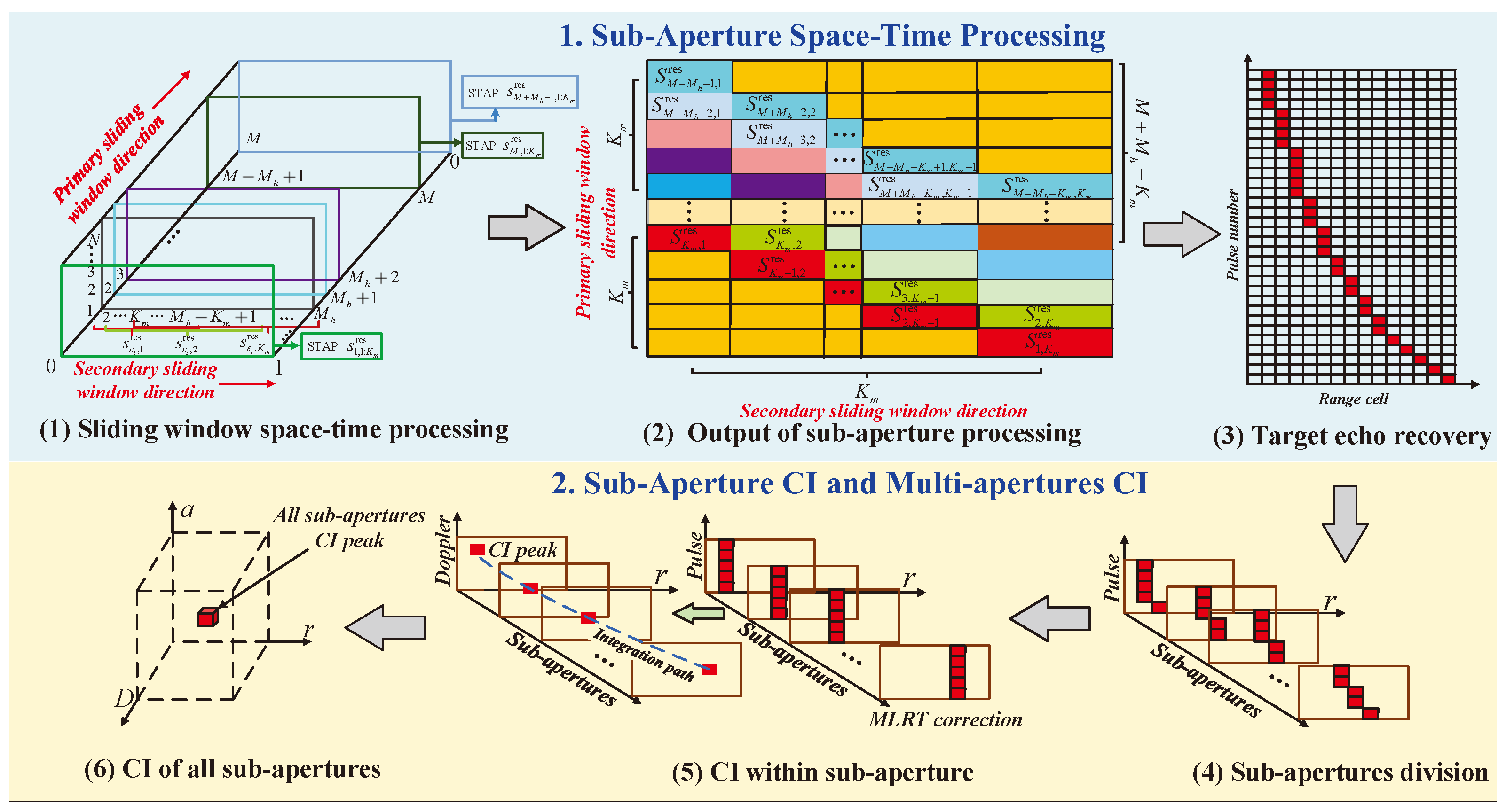
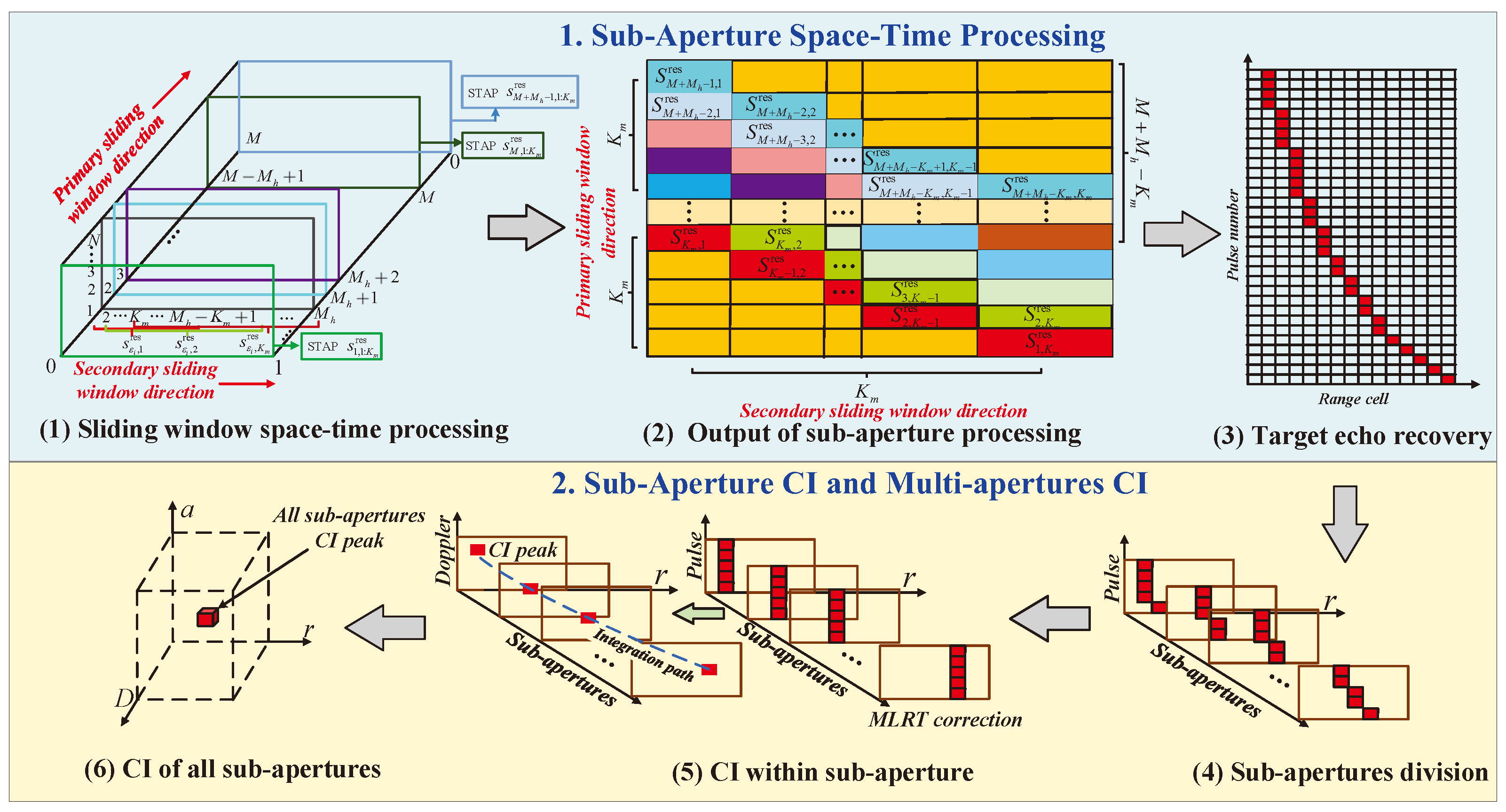
- The joint implementation method based on sub-aperture processing to realize clutter suppression and coherent maneuvering target detection is given via sub-aperture processing;
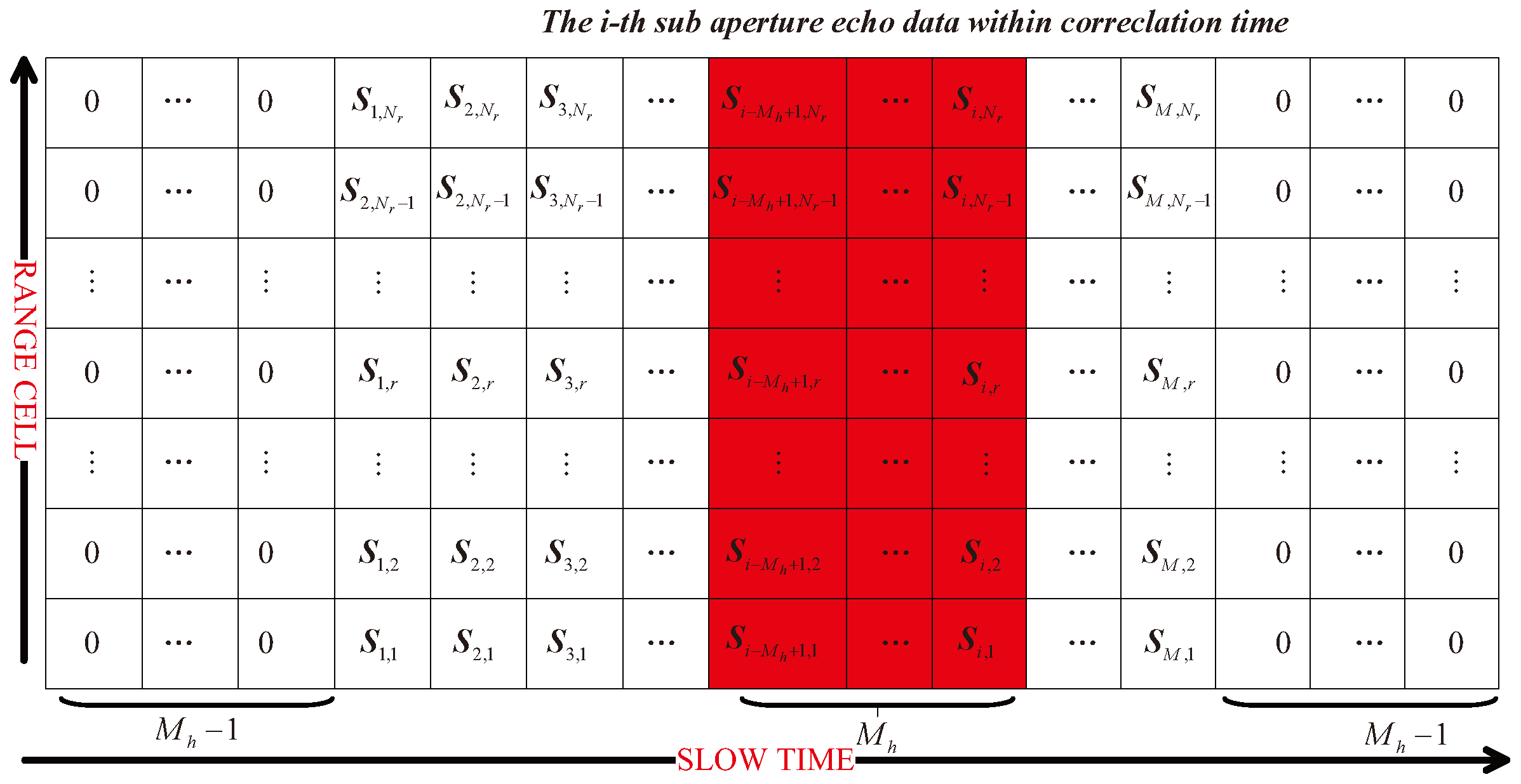
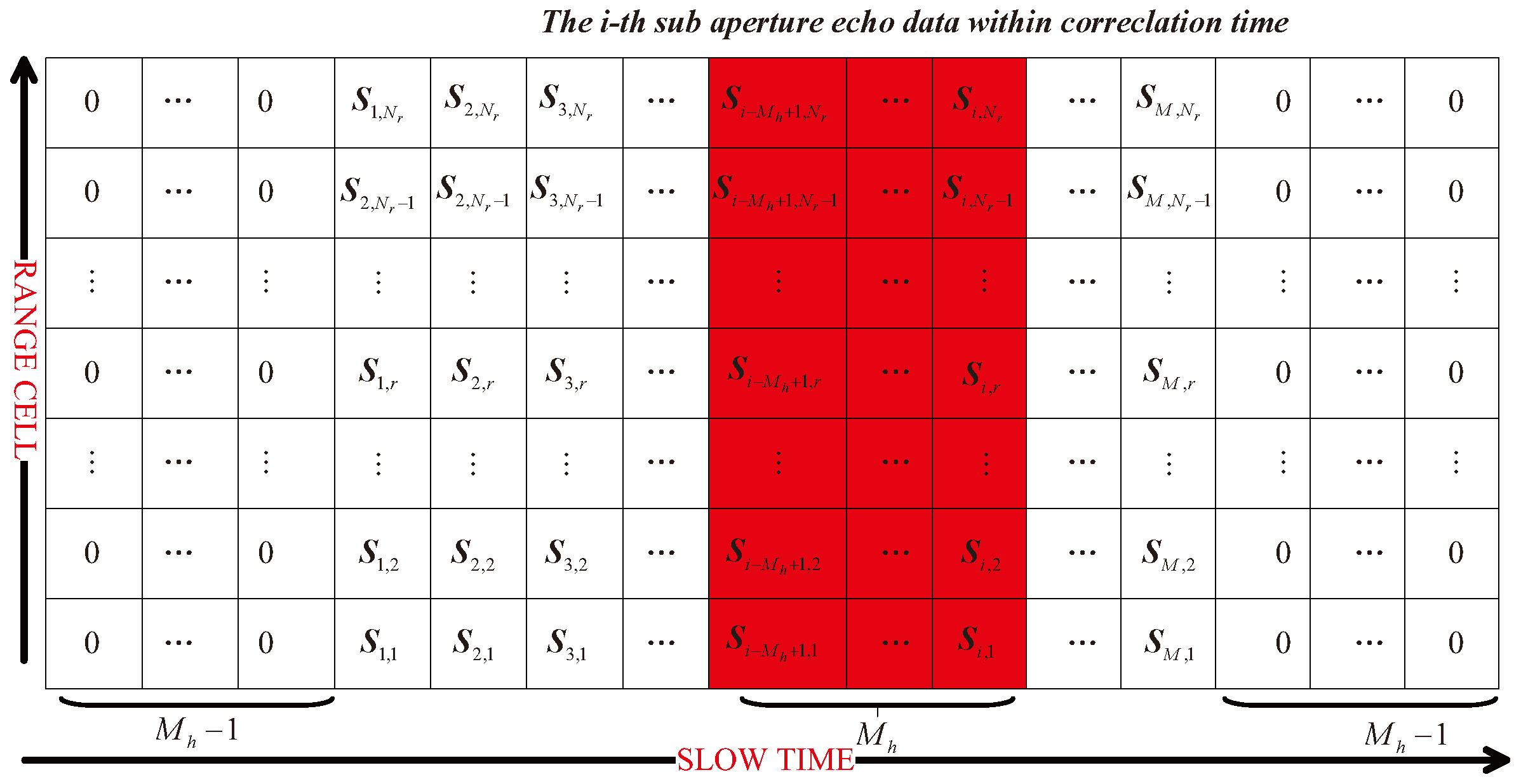
- The sub-aperture space–time processing is given to remove the clutter non-stationarity after clutter Doppler compensation and sliding window processing. Next, the echo is reconstructed in the range–slow-time domain to provide convenience for subsequent CI;
- The slow-time aperture division is studied and the MLRT is applied to correct the RCM for each sub-aperture. Then, the matched filtering function is established to eliminate RCM/DM among different sub-apertures and coherent detection is realized by using all sub-apertures.
2. Materials and Methods
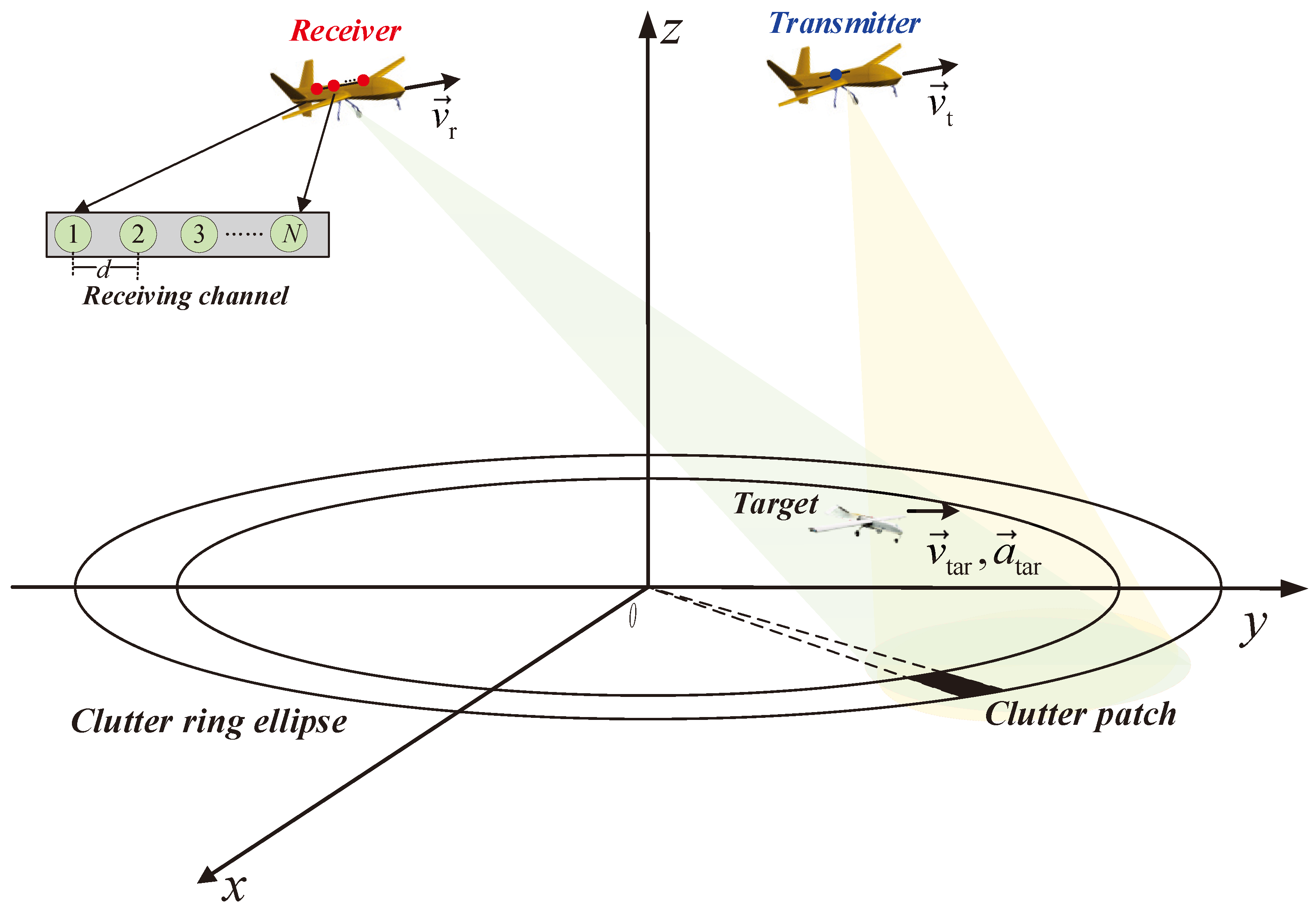
2.1. Signal Model
2.2. The Sub-Aperture Processing Method
Sub-Aperture Space–Time Processing
2.3. Sub-Aperture CI and Multi-apertures Coherent Detection
3. Results
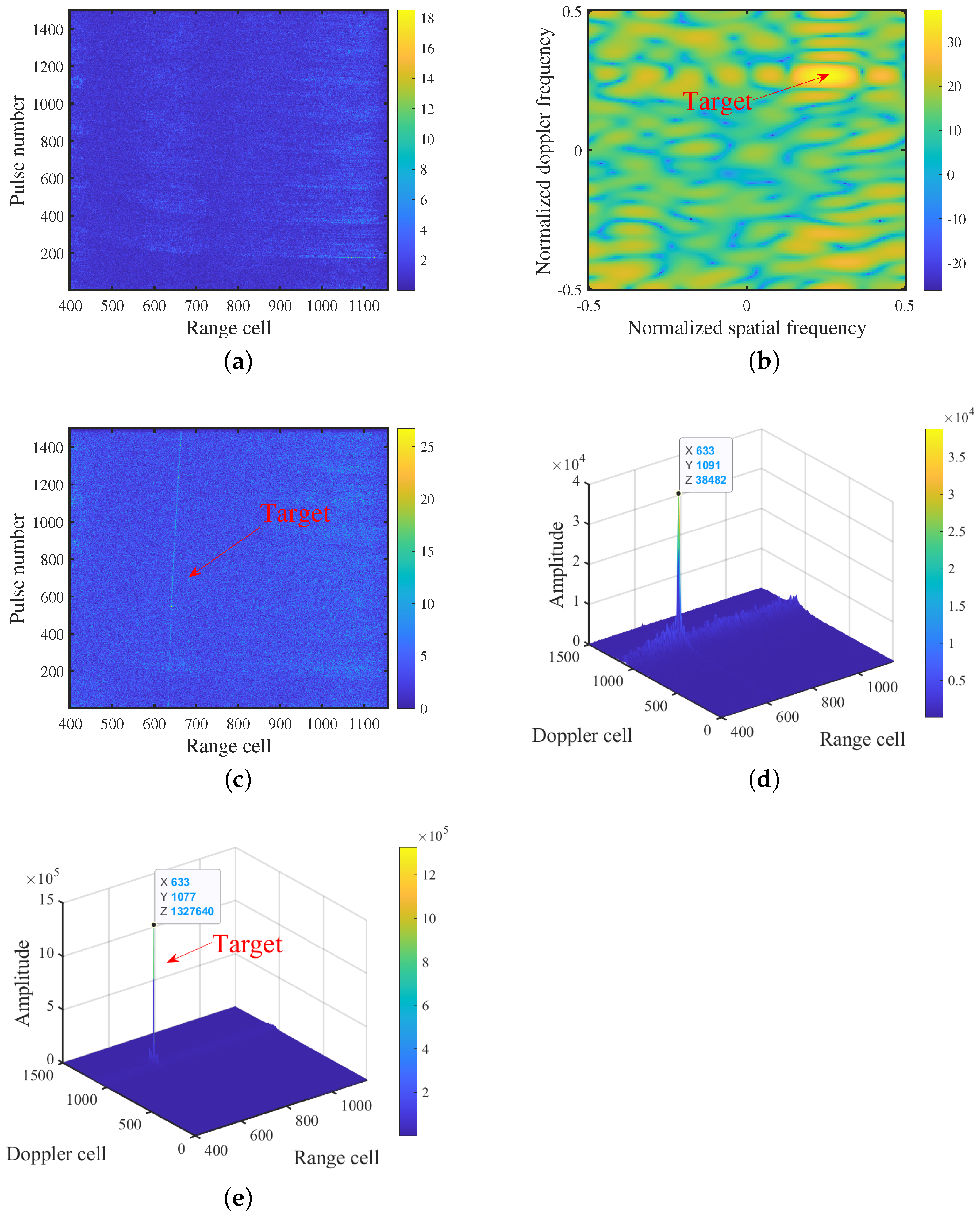
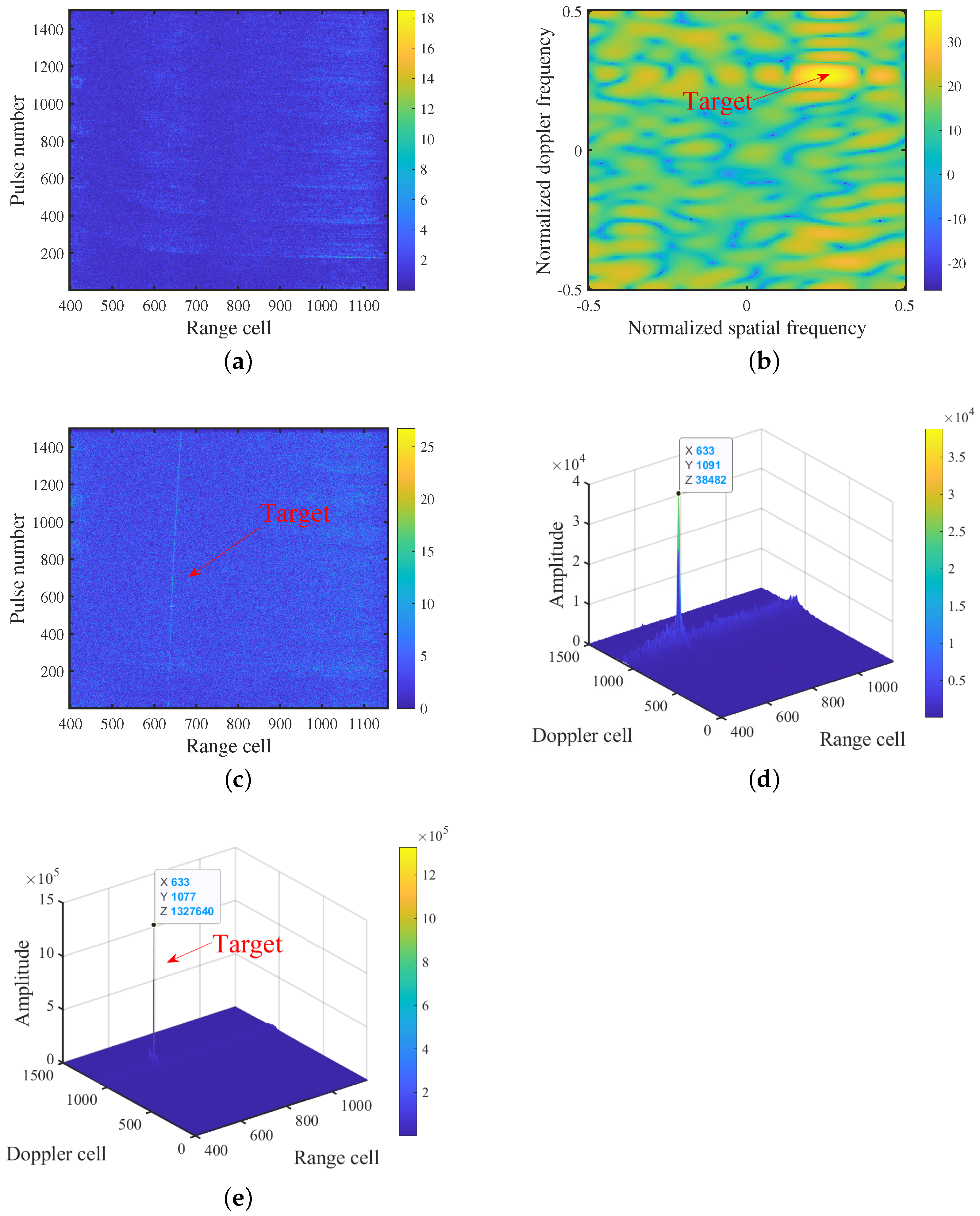
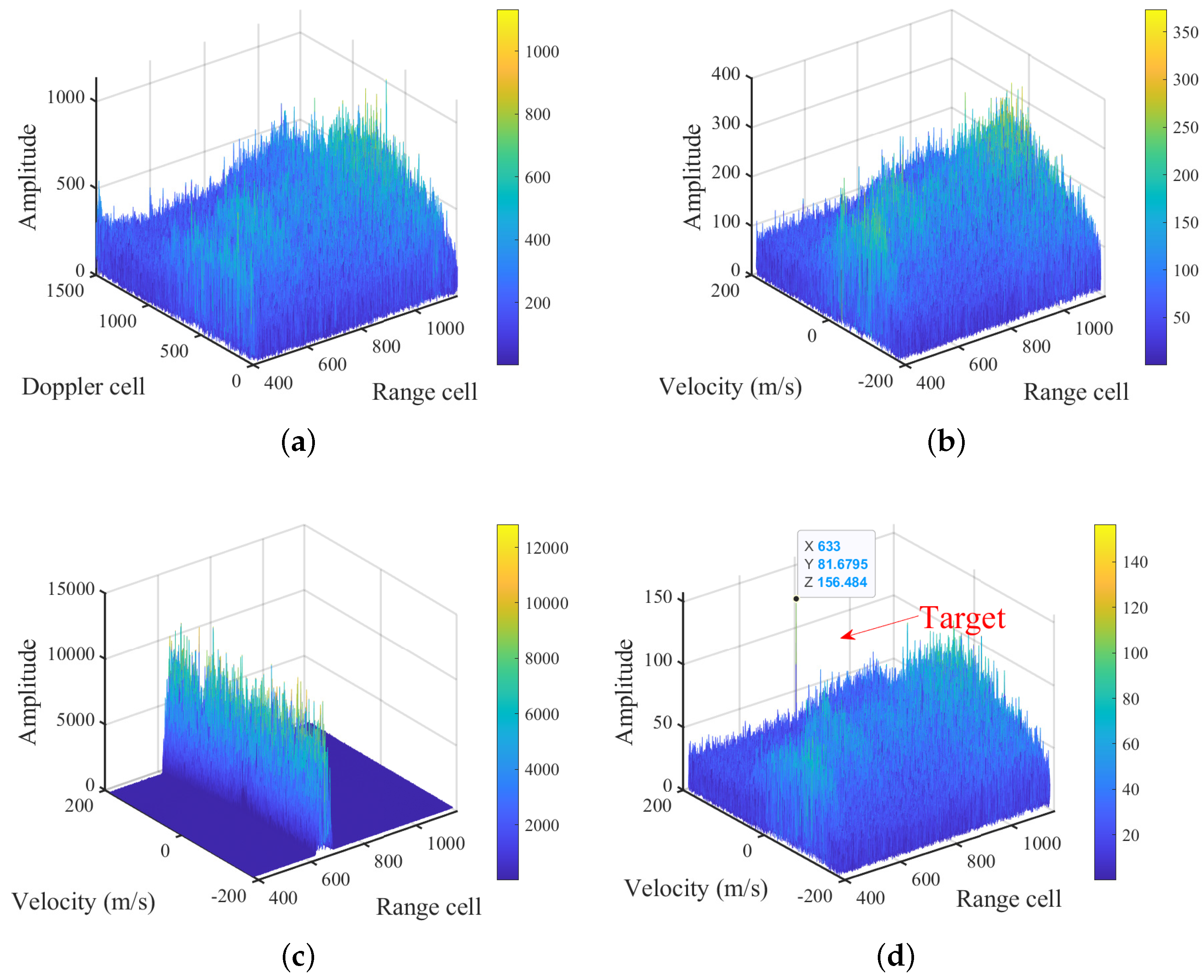
3.1. Single Target Simulations of the Proposed Method
3.2. Comparison Results of Different Methods at Low SCNR
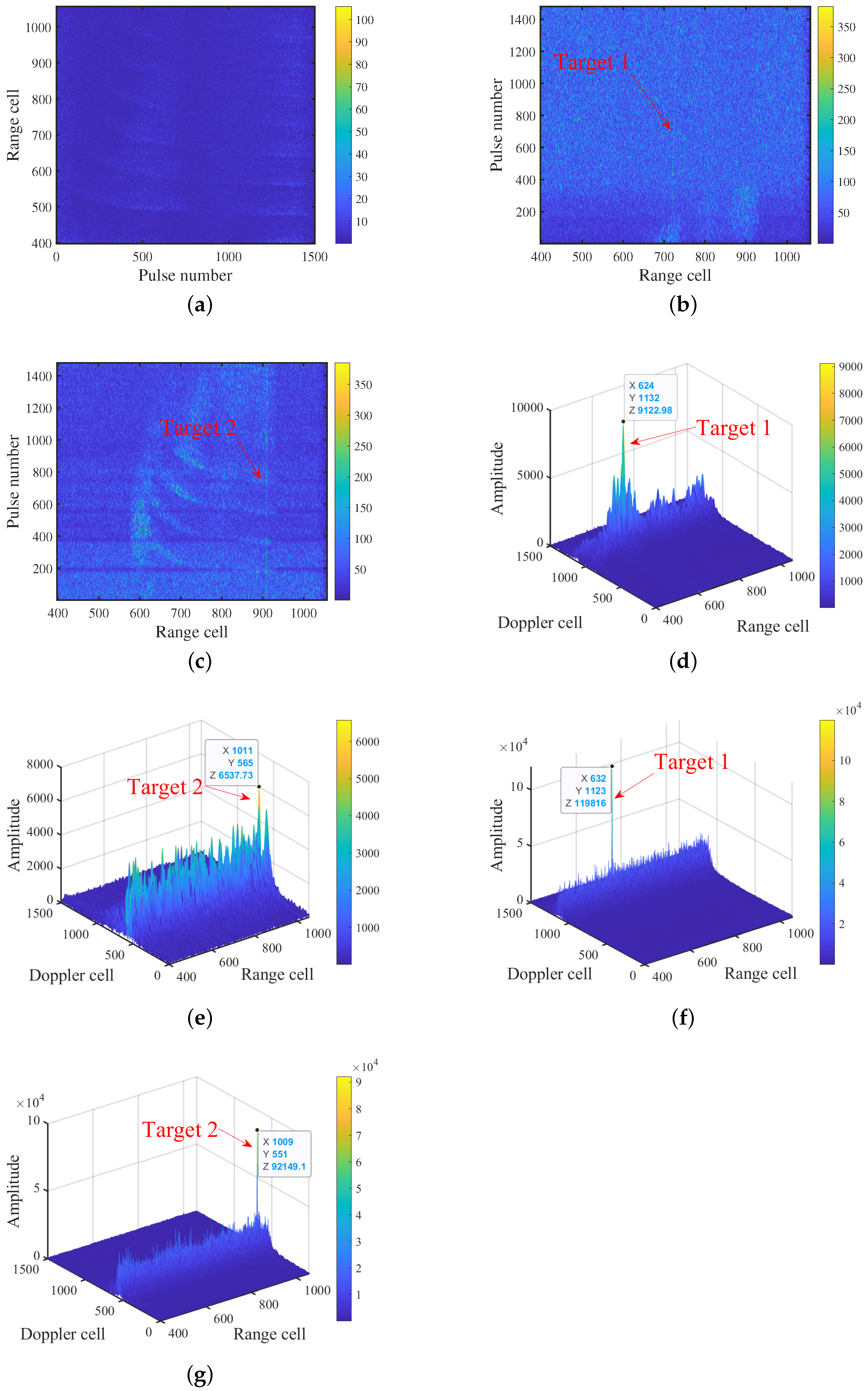
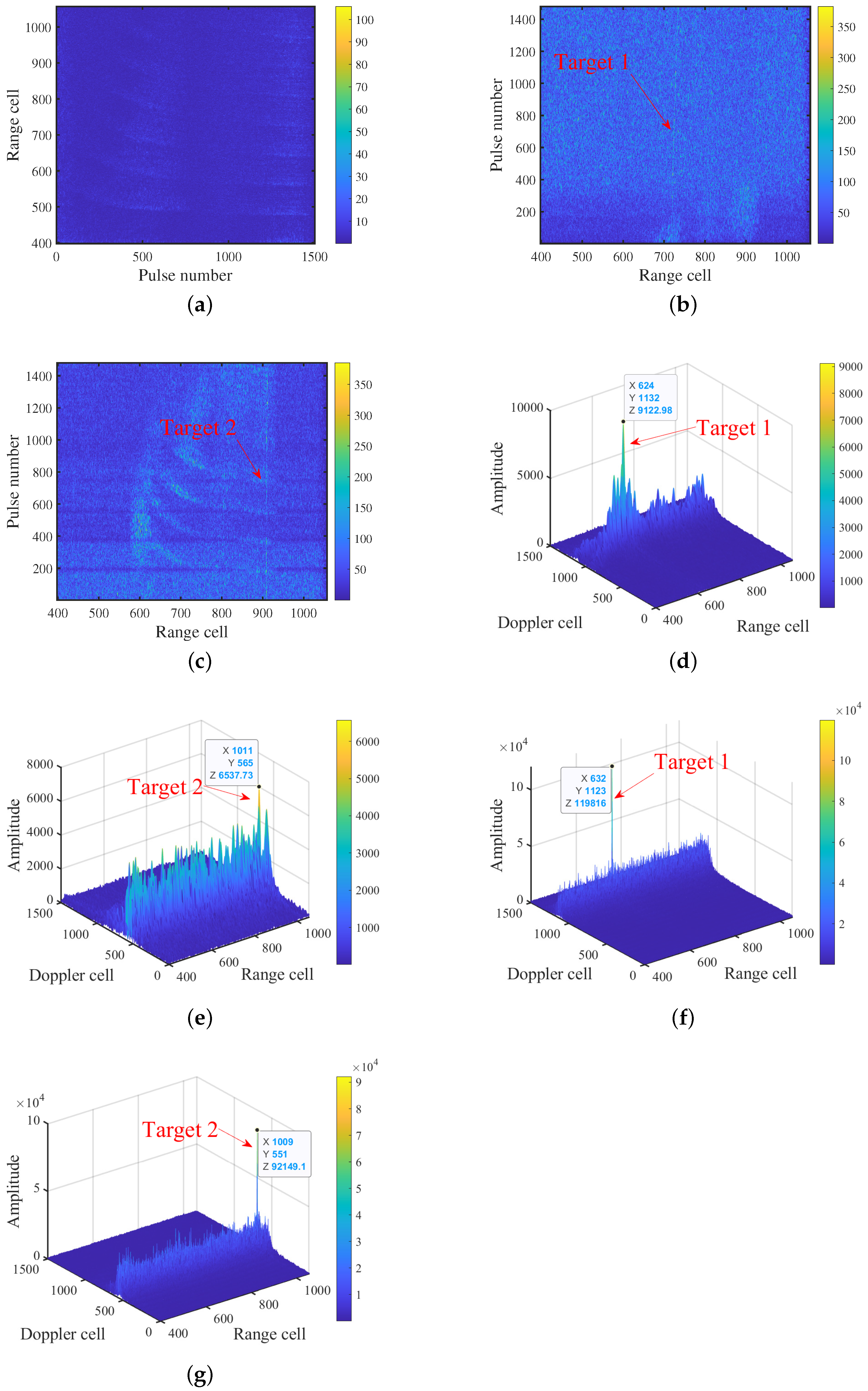
3.3. Multi-Target Simulation of the Proposed Method
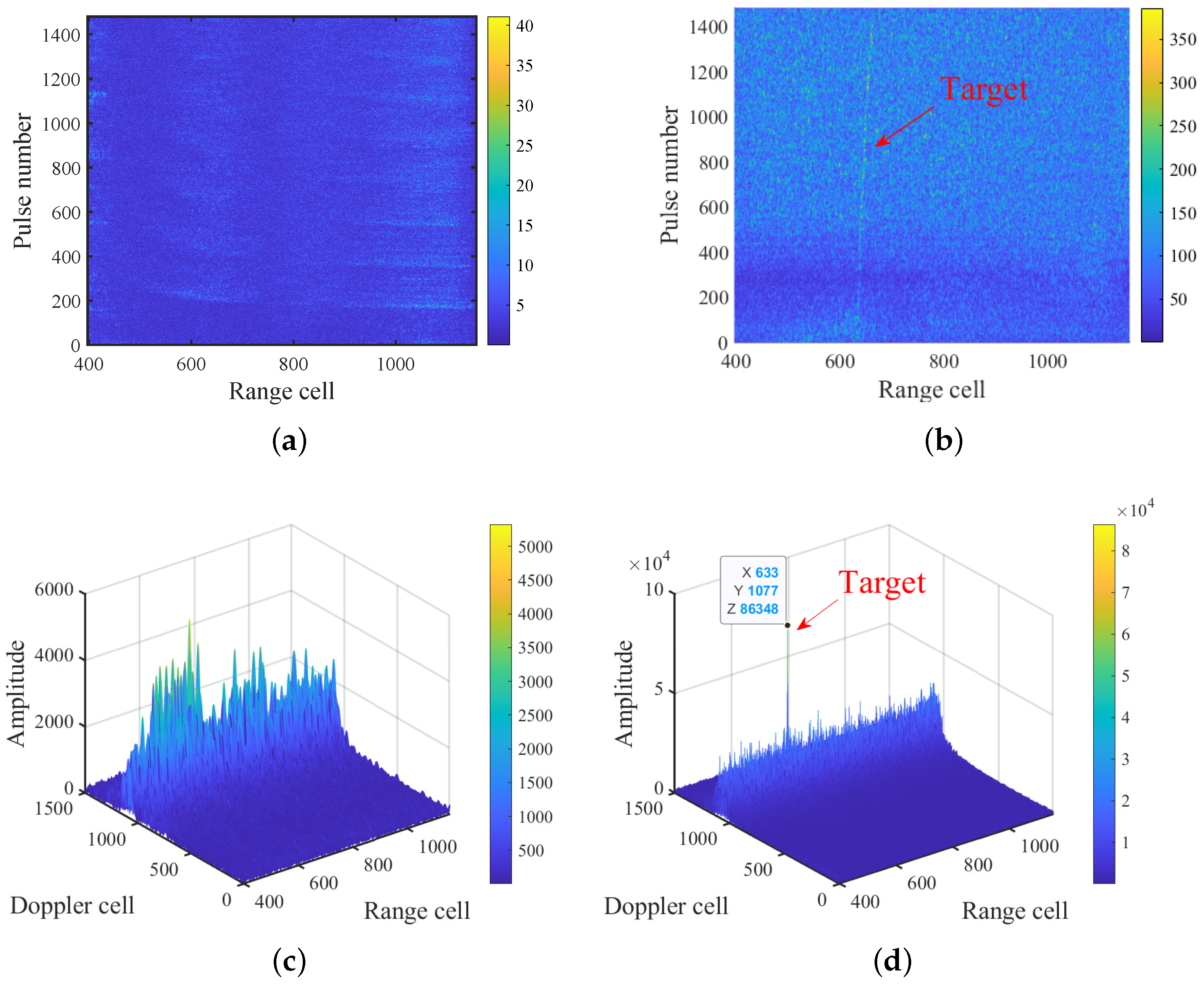
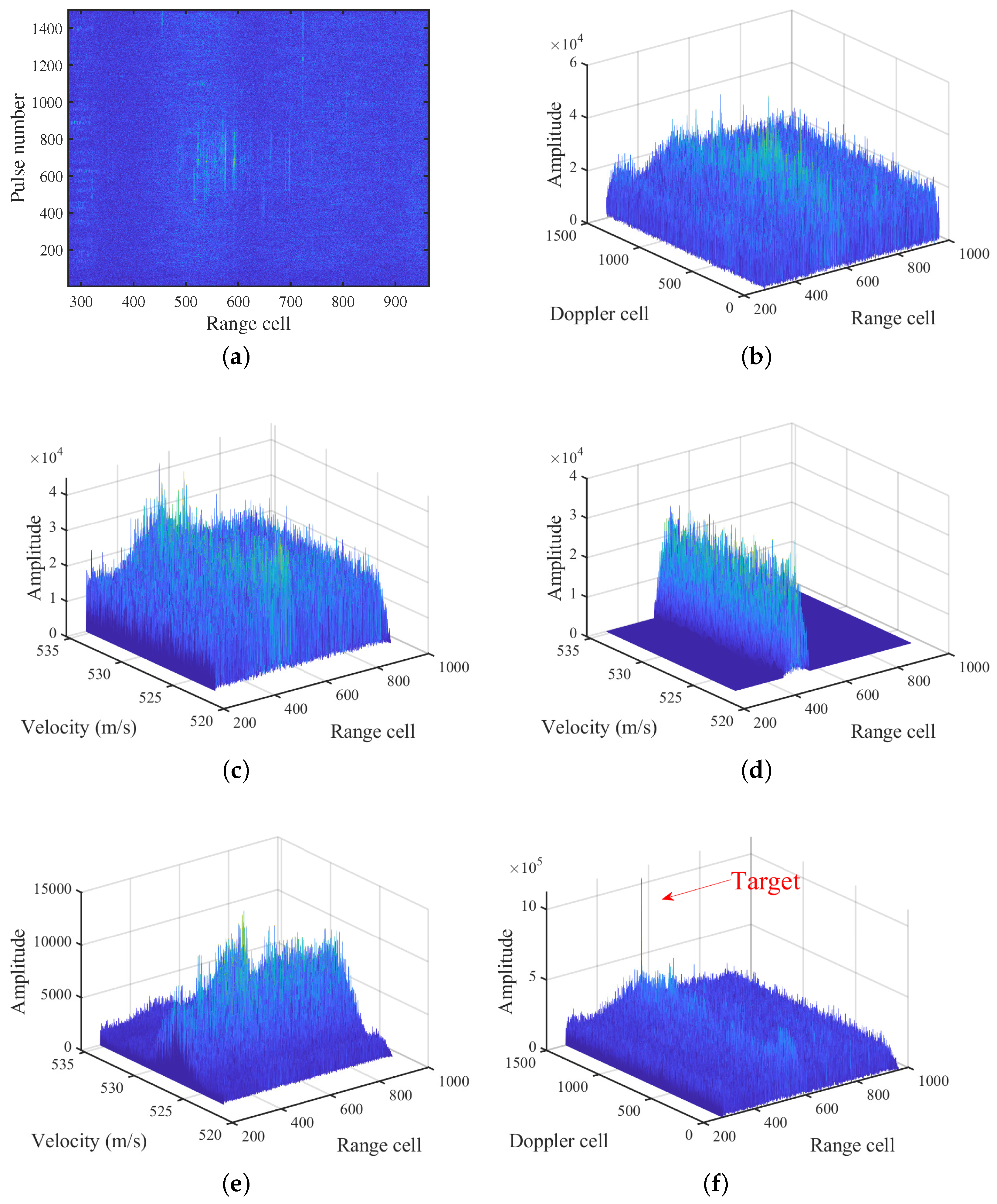
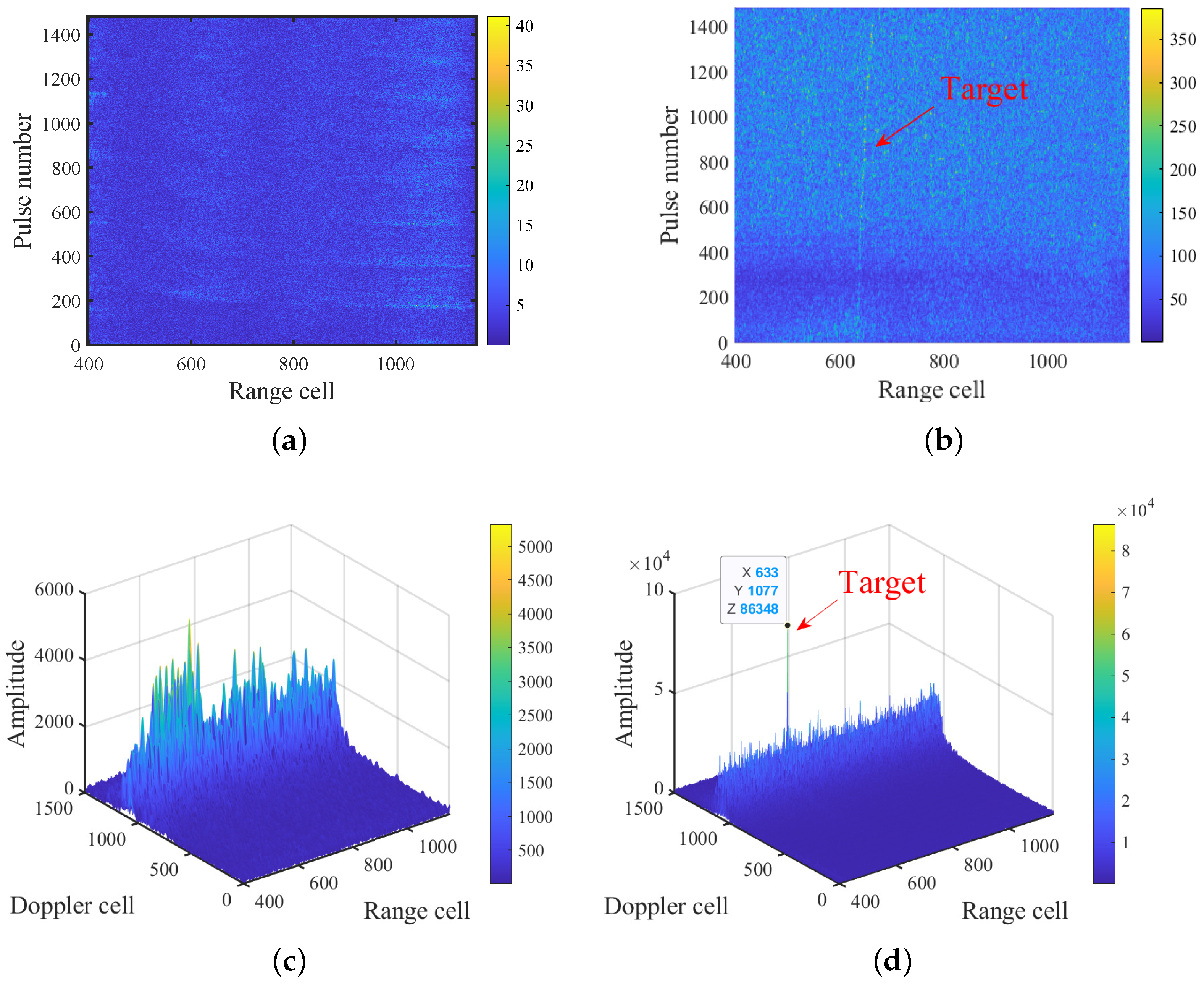
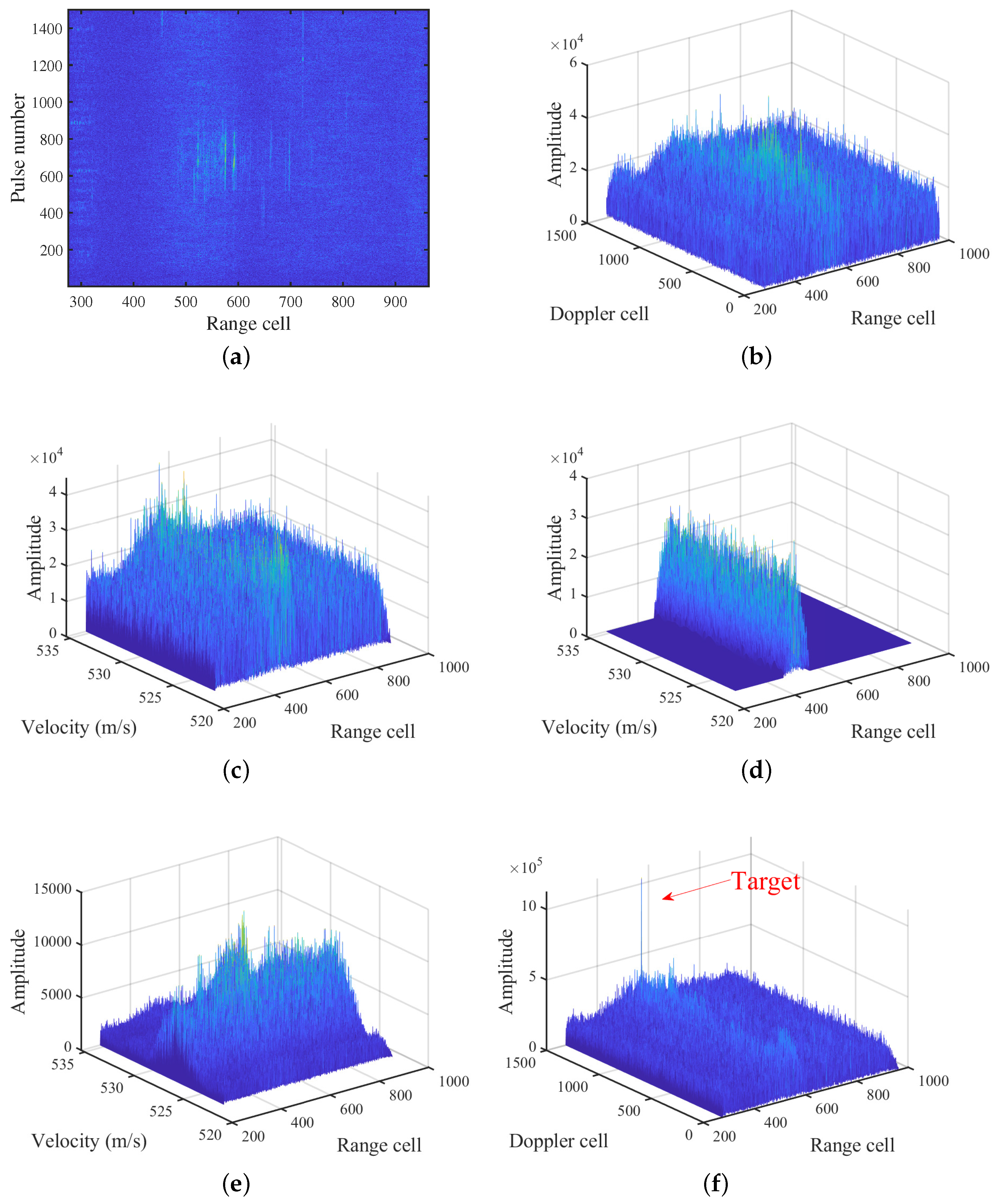
3.4. Real Data Processing Results
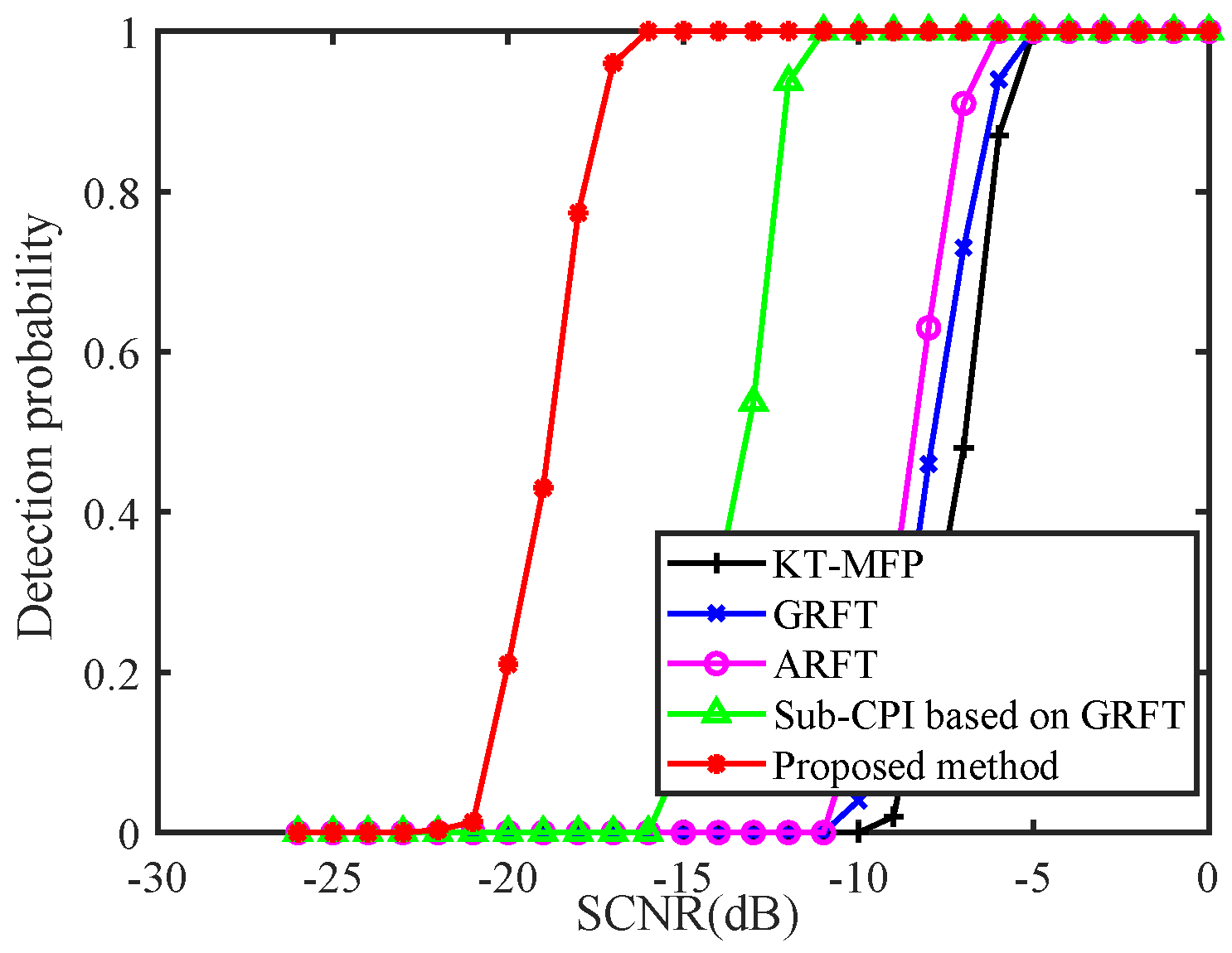
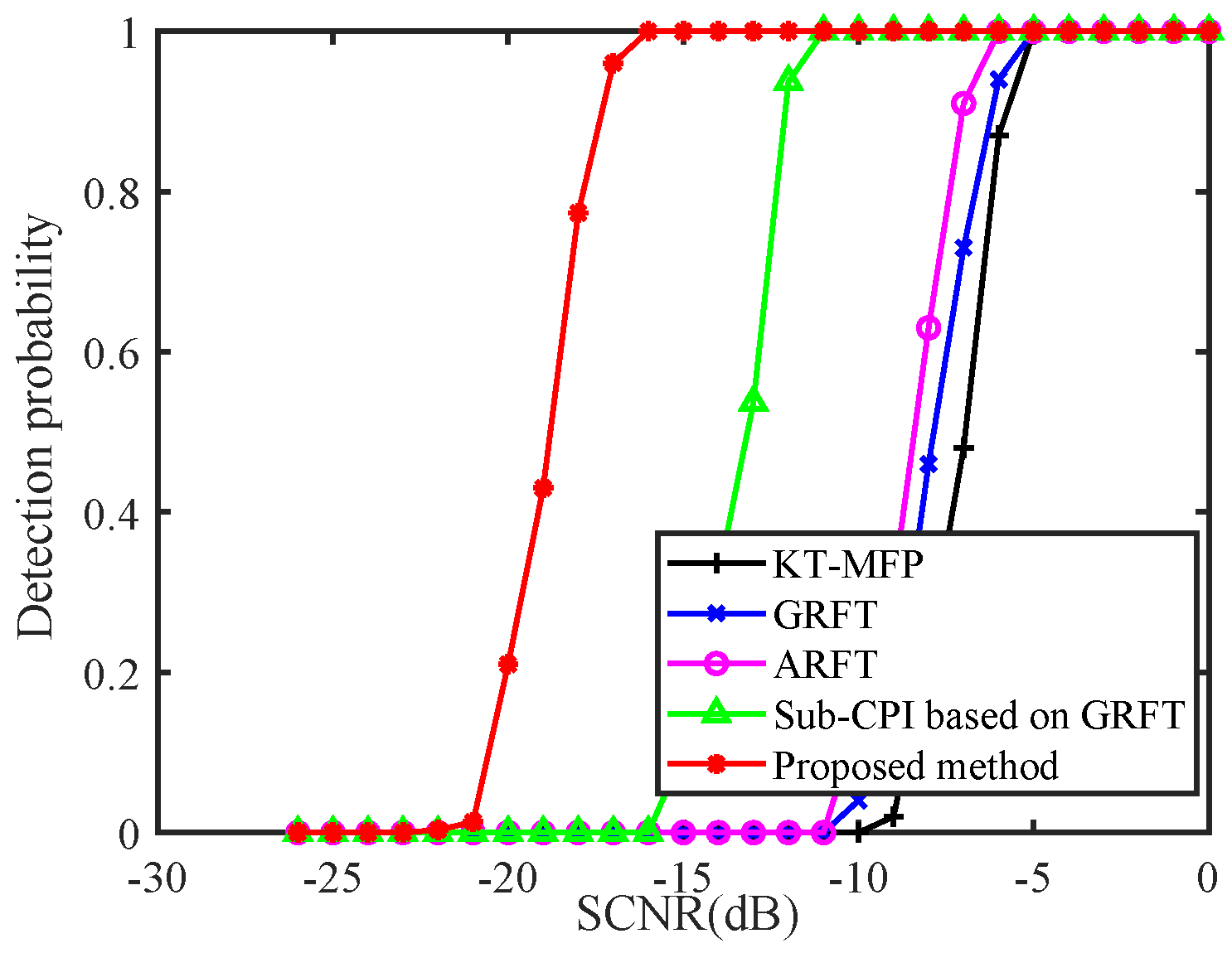
3.5. Target Detection Performance
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sun, X.; Wu, X.; Zhou, Q.; Zhang, L.; Wu, J. Airborne Radar Staggered PRF Coherent Processing Method for Down-Looking Target Detection. Remote Sens. 2023, 15, 3271. [Google Scholar] [CrossRef]
- Liu, J.; Liao, G.; Xu, J.; Zhu, S.; Zeng, C.; Juwono, F. Unsupervised Affinity Propagation Clustering Based Clutter Suppression and Target Detection Algorithm for Non-Side-Looking Airborne Radar. Remote Sens. 2023, 15, 2077. [Google Scholar] [CrossRef]
- Xu, G.; Zhou, S.; Yang, L.; Deng, S.; Wang, Y.; Xing, M. Efficient Fast Time-Domain Processing Framework for Airborne Bistatic SAR Continuous Imaging Integrated with Data-Driven Motion Compensation. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5208915. [Google Scholar] [CrossRef]
- Xia, D.; Zhang, L.; Wu, T.; Hu, W. An Interference Suppression Algorithm for Cognitive Bistatic Airborne Radars. IEEE J. Syst. Eng. Electron. 2022, 33, 585–593. [Google Scholar] [CrossRef]
- Wang, C.; Zheng, J.; Jiu, B.; Liu, H. Model-and-Data-Driven Method for Radar Highly Maneuvering Target Detection. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 2201–2217. [Google Scholar] [CrossRef]
- Zhan, M.; Huang, P.; Zhu, S.; Liu, X.; Liao, G.; Sheng, J.; Li, S. A Modified Keystone Transform Matched Filtering Method for Space-Moving Target Detection. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5105916. [Google Scholar] [CrossRef]
- Li, Z.; Ye, H.; Liu, Z.; Sun, Z.; An, H.; Wu, J.; Yang, J. Bistatic SAR Clutter-Ridge Matched STAP Method for Nonstationary Clutter Suppression. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5216914. [Google Scholar] [CrossRef]
- Li, Z.; Li, S.; Liu, Z.; Yang, H.; Wu, J.; Yang, J. Bistatic Forward-Looking SAR MP-DPCA Method for Space—Time Extension Clutter Suppression. IEEE Trans. Geosci. Remote Sens. 2020, 58, 6565–6579. [Google Scholar] [CrossRef]
- Zhang, J.; Ding, T.; Zhang, L. Longtime Coherent Integration Algorithm for High-Speed Maneuvering Target Detection Using Space-Based Bistatic Radar. IEEE Trans. Geosci. Remote Sens. 2020, 60, 5100216. [Google Scholar] [CrossRef]
- Chen, W.; Xie, W.; Wang, Y. Range-Dependent Ambiguous Clutter Suppression for Airborne SSF-STAP Radar. IEEE Trans. Aerosp. Electron. Syst. 2021, 58, 855–867. [Google Scholar] [CrossRef]
- Ding, J.; Li, Y.; Li, M.; Wang, J. Focusing High Maneuvering Bistatic Forward-Looking SAR with Stationary Transmitter Using Extended Keystone Transform and Modified Frequency Nonlinear Chirp Scaling. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 58, 855–867. [Google Scholar] [CrossRef]
- Comite, D.; Pierdicca, N. Decorrelation of the Near-Specular Land Scattering in Bistatic Radar Systems. IEEE Trans. Geosci. Remote Sens. 2021, 60, 2000813. [Google Scholar] [CrossRef]
- Liu, Z.; Ye, H.; Li, Z.; Yang, Q.; Sun, Z.; Wu, J.; Yang, J. Optimally Matched Space-Time Filtering Technique for BFSAR Nonstationary Clutter Suppression. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5210617. [Google Scholar] [CrossRef]
- Al-Sa’d, M.; Boashash, B.; Gabbouj, M. Design of an Optimal Piece-Wise Spline Wigner-Ville Distribution for TFD Performance Evaluation and Comparison. IEEE Trans. Signal Process. 2021, 69, 3963–3976. [Google Scholar] [CrossRef]
- Shi, R.; Wang, Y.; Wang, B.; Xiang, M. Frequency Modulation Nonlinearity Correction for FMCW SAL Based on WVD with Gradient Rotation Enhancement. IEEE Geosci. Remote Sens. Lett. 2023, 20, 6502205. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, X.; Yang, Q.; Xiao, Y.; An, H.; Yang, H.; Wu, J.; Yang, J. Hybrid SAR-ISAR Image Formation via Joint FrFT-WVD Processing for BFSAR Ship Target High-Resolution Imaging. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5215713. [Google Scholar] [CrossRef]
- Zhao, J.; Wang, Y. A Cross-range Scaling Method for ISAR Based on 2D MUSIC and WVD-Hough Transform. In Proceedings of the 2023 International Applied Computational Electromagnetics Society Symposium (ACES-China), Hangzhou, China, 15–18 August 2023; pp. 1–3. [Google Scholar]
- Li, X.; Cui, G.; Yi, W.; Kong, L. Coherent Integration for Maneuvering Target Detection Based on Radon-Lv’s Distribution. IEEE Signal Process. Lett. 2015, 22, 1467–1471. [Google Scholar] [CrossRef]
- Li, Y.; Su, T.; Zheng, J.; He, X. ISAR Imaging of Targets with Complex Motions Based on Modified Lv’s Distribution for Cubic Phase Signal. IEEE J. Sel. Topics Appl. Earth Observ. Remote Sens. 2015, 8, 4775–4784. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhang, Y.; Sun, B.; Dong, Z.; Yu, L. Motion Parameters Estimation and HRRP Reconstruction of Maneuvering Weak Target for Wideband Radar Based on SKT-ELVD. IEEE Trans. Aerosp. Electron. Syst. 2022, 59, 2752–2763. [Google Scholar] [CrossRef]
- Chen, X.; Guan, J.; Liu, N.; He, Y. Maneuvering Target Detection via Radon-Fractional Fourier Transform-Based Long-Time Coherent Integration. IEEE Trans. Signal Process. 2014, 62, 939–953. [Google Scholar] [CrossRef]
- Chen, Z.; He, C.; Zhao, C.; Xie, F. Using SVD-FRFT Filtering to Suppress First-Order Sea Clutter in HFSWR. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1076–1080. [Google Scholar] [CrossRef]
- Chen, S.; Lin, Y.; Yuan, Y.; Li, X.; Hou, L.; Zhang, S. Suppressive Interference Suppression for Airborne SAR Using BSS for Singular Value and Eigenvalue Decomposition Based on Information Entropy. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5205611. [Google Scholar] [CrossRef]
- Blasone, G.; Colone, F.; Lombardo, P.; Wojaczek, P.; Cristallini, D. Passive Radar DPCA Schemes with Adaptive Channel Calibration. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 4014–4034. [Google Scholar] [CrossRef]
- Ma, C.; Hu, X.; Yeo, T.S.; Ng, B.P.; Zhang, Q. Matrix Ill-Condition Analysis in Spectrum Recovery of DPCA HRWS SAR Imaging. IEEE Geosci. Remote Sens. Lett. 2018, 16, 55–59. [Google Scholar] [CrossRef]
- Huang, P.; Zou, Z.; Xia, X.-G.; Liu, X.; Liao, G. A Novel Dimension-Reduced Space—Time Adaptive Processing Algorithm for Spaceborne Multichannel Surveillance Radar Systems Based on Spatial—Temporal 2-D Sliding Window. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5109721. [Google Scholar] [CrossRef]
- Klintberg, J.; McKelvey, T.; Dammert, P. A Parametric Approach to Space-Time Adaptive Processing in Bistatic Radar Systems. IEEE Trans. Aerosp. Electron. Syst. 2021, 58, 1149–1160. [Google Scholar] [CrossRef]
- Zhan, M.; Zhao, C.; Qin, K.; Huang, P.; Fang, M.; Zhao, C. Subaperture Keystone Transform Matched Filtering Algorithm and Its Application for Air Moving Target Detection in an SBEWR System. IEEE J. Sel. Top. Appl. Earth. Obs. Remote Sens. 2023, 16, 2262–2274. [Google Scholar] [CrossRef]
- Lin, Y.; Qiu, X.; Li, H.; Wang, W.; Jiao, Z.; Ding, C. Channel Migration Correction for Low-Altitude Airborne SAR Tomography Based on Keystone Transform. IEEE Geosci. Remote Sens. Lett. 2023, 20, 4011805. [Google Scholar] [CrossRef]
- Sun, Z.; Li, X.; Yi, W.; Cui, G.; Kong, L. A Coherent Detection and Velocity Estimation Algorithm for the High-Speed Target Based on the Modified Location Rotation Transform. IEEE J. Sel. Top. Appl. Earth. Obs. Remote Sens. 2018, 11, 2346–2361. [Google Scholar] [CrossRef]
- ÇUlha, O.; Tanik, Y. Low Complexity Keystone Transform and Radon Fourier Transform Utilizing Chirp-Z Transform. IEEE Access 2020, 8, 105535–105541. [Google Scholar] [CrossRef]
- Li, H.; Liao, G.; Xu, J.; Zeng, C. Sub-CPI STAP based Clutter Suppression and Target Refocusing with Airborne Radar System. Digit. Signal Process. 2022, 123, 103418. [Google Scholar] [CrossRef]
- Huang, P.; Zou, Z.; Xia, X.; Liu, X.; Liao, G.; Xin, Z. Multichannel Sea Clutter Modeling for Spaceborne Early Warning Radar and Clutter Suppression Performance Analysis. IEEE Trans. Geosci. Remote Sens. 2020, 59, 8349–8366. [Google Scholar] [CrossRef]
- Yuan, H.; Xu, H.; Duan, K.; Xie, W.; Wang, Y. Cross-Spectral Metric Smoothing-Based GIP for Space-Time Adaptive Processing. IEEE Geosci. Remote Sens. Lett. 2018, 16, 1388–1392. [Google Scholar] [CrossRef]
- Grossi, E.; Lops, M.; Venturino, L. Detection Rate Optimization for Swerling Targets in Gaussian Noise. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 2054–2065. [Google Scholar] [CrossRef]
- Wang, J.; Ye, J.; Hua, G. The Optimal Detector of Distributed MIMO Radar under Swerling-Chi Scattering Models. IEEE Geosci. Remote Sens. Lett. 2020, 17, 1129–1133. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Carrier frequency | 0.2 GHz |
| Range bandwidth | 5 MHz |
| Sampling frequency | 10 MHz |
| PRF | 500 Hz |
| CPI | 3 s |
| Pulse width | 10 µs |
| Velocity of transmitter | (−80, 95, 0) m/s |
| Velocity of receiver | (−80, 95, 0) m/s |
| The initial position coordinates of the transmitter | (0.4, 16.5, 5) km |
| The initial position coordinates of the receiver | (0.2, 10, 5) km |
| Parameters | Value |
|---|---|
| The initial position coordinates | (−0.1, 4, 3) km |
| The initial velocity | (400, −60, 200) m/s |
| The acceleration | (−3, −10, 10) |
| Parameters | Target 1 | Target 2 |
|---|---|---|
| The initial position coordinates | (0.1, 4, 3) km | (−0.1, −1, 0) km |
| The initial velocity | (400, −60, 200) m/s | (400, 135, 0) m/s |
| The acceleration | (−30, −12.5, 10) | (−30, −12.5, 0) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Z.; Jiang, X.; Zhang, H.; Deng, J.; Xiao, Z.; Cheng, C.; Li, X.; Cui, G. Joint Implementation Method for Clutter Suppression and Coherent Maneuvering Target Detection Based on Sub-Aperture Processing with Airborne Bistatic Radar. Remote Sens. 2024, 16, 1379. https://doi.org/10.3390/rs16081379
Sun Z, Jiang X, Zhang H, Deng J, Xiao Z, Cheng C, Li X, Cui G. Joint Implementation Method for Clutter Suppression and Coherent Maneuvering Target Detection Based on Sub-Aperture Processing with Airborne Bistatic Radar. Remote Sensing. 2024; 16(8):1379. https://doi.org/10.3390/rs16081379
Chicago/Turabian StyleSun, Zhi, Xingtao Jiang, Haonan Zhang, Jiangyun Deng, Zihao Xiao, Chen Cheng, Xiaolong Li, and Guolong Cui. 2024. "Joint Implementation Method for Clutter Suppression and Coherent Maneuvering Target Detection Based on Sub-Aperture Processing with Airborne Bistatic Radar" Remote Sensing 16, no. 8: 1379. https://doi.org/10.3390/rs16081379