


MoonLIGHT and MPAc: The European Space Agency’s Next-Generation Lunar Laser Retroreflector for NASA’s CLPS/PRISM1A (CP-11) Mission

 , , , , ,
, , , , ,
Abstract
1. Introduction
- To compensate for the detrimental effect of lunar librations through single, short reflected pulses with shorter temporal spreading;
- To provide returning signal intensities comparable to those from the Apollo arrays;
2. The MoonLIGHT CCR
2.1. Characteristics
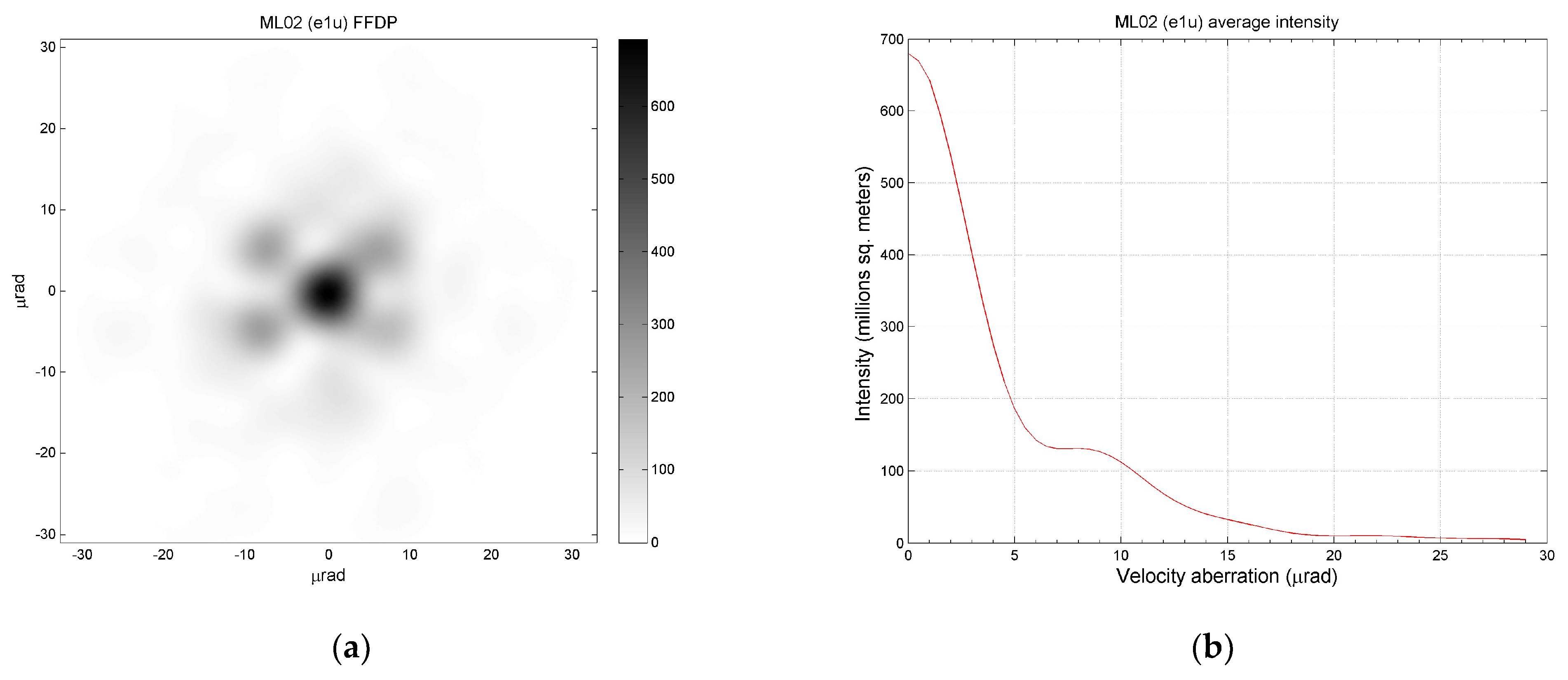
2.2. Optical Analysis
3. MPAc, the MoonLIGHT Pointing Actuator
3.1. Features
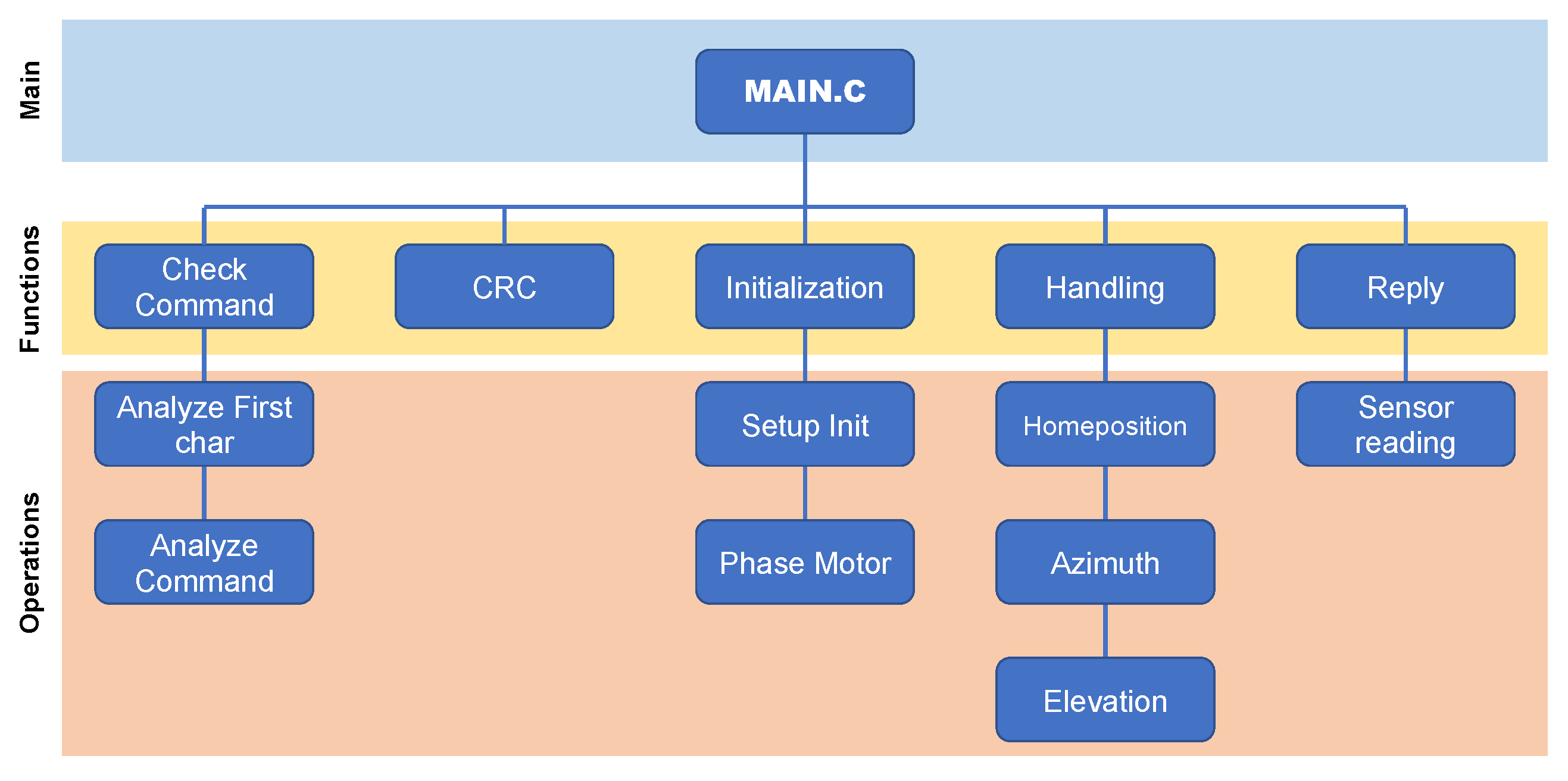
3.2. MPAc PFM1 Functionality
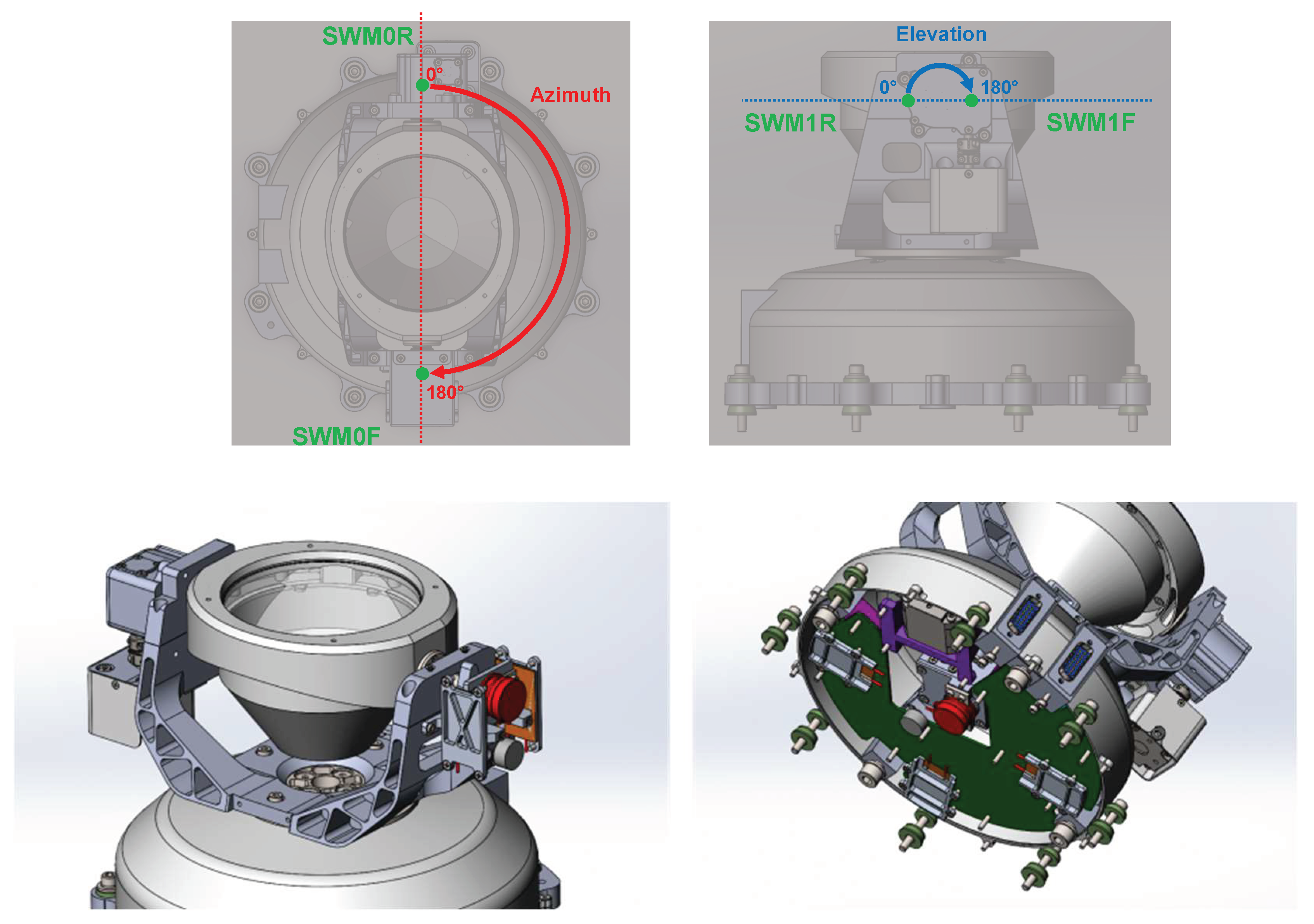
- The azimuth frame is the interface with the lander and contains most of the electronics and the motor responsible for azimuth rotations from 0° to 180° around an axis perpendicular to the lander deck. These rotations are transmitted to the elevation frame (Figure 4).
- The elevation frame contains the motor responsible for elevation rotations from 0° to 180° around an axis parallel to the lander deck (Figure 4). This frame also holds the CCR housing.
- The CCR housing is a completely passive block that holds and protects the CCR through its integration structure.
- Forward, at the end of clockwise rotations, SWM0F and SWM1F, for M0 and M1, respectively;
- Rewind, at the end of counterclockwise rotations, SWM0R and SWM1R.
4. Impact of the LLR Measurements and Expected Science Products
- A constraint is imposed such that the area under the fit function shall match to the area under a windowed region of the lunar histogram;
- A constant is added to match the measured background.
- Astrophysical Sciences:
- Deployment of MoonLIGHT will support, on the LLR space segment, an improvement up to a factor 100 of several tests of GR and relativistic gravity (Table 1). In fact, LLR currently provides the best, or among the best, constraints on the following:
- Weak equivalence principle (WEP) at a level of 10−13.
- Strong equivalence principle (SEP) at a level of 4 × 10−4.
- Time-rate-of-change of Newton’s gravitational constant, G, to better than a part in 10−12 per year.
- Geodetic precession at a level of 0.1%.
- Yukawa deviations from 1/r2 gravity at 10−10 times the strength of gravity.
- In addition, LLR currently allows us to set stringent constraints on the following new theories of fundamental gravity:
- Lunar Science [23]:
- Moments of inertia, elastic tides, tidal dissipation, dissipation at the CMB (Core Mantle Boundary), fluid core oblateness, inner core, free librations.
- Establishing a global lunar geophysical network (LGN) [24].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fundamental Physics Measurement | Current LLR Accuracy of ~1 cm, Supported by Apollo/Lunokhod LRAs | LLR Accuracy of ~1mm (Contribution of Next-Generation CCRs) | Ultimate LLR Accuracy ~0.1mm (Contribution of Next-Generation CCRs) |
|---|---|---|---|
| WEP | |Δa/a| < 2.4 × 10−14 | <10−14 | 10−15 |
| SEP | |η| < 3.4 × 10−4 | 3 × 10−5 | 3 × 10−6 |
| PPN β | |β − 1| < 7.2 × 10−5 | <10−5 | 10−6 |
| Time variation of G | | < 9.5 × 10−15 yr−1 | 5 × 10−15 | <1 × 10−15 |
| Inverse Square Law | |α| < 3 × 10−12 | 10−12 | 10−13 |
| Geodetic precession | |KGP − 1| < 6.4 × 10−3 | <6 × 10−4 | <6 × 10−5 |
5. Summary
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Martini, M.; Dell’Agnello, S.; Currie, D.; Delle Monache, G.; Vittori, R.; Chandler, J.; Cantone, C.; Boni, A.; Berardi, S.; Patrizi, G.; et al. MoonLIGHT: A USA-Italy lunar laser ranging retroreflector array for the 21st century. Planet. Space Sci. 2012, 74, 276–282. [Google Scholar] [CrossRef]
- Ciocci, E.; Martini, M.; Contessa, S.; Porcelli, L.; Mastrofini, M.; Currie, D.; Delle Monache, G.; Dell’Agnello, S. Performance analysis of next-generation lunar laser retroreflectors. Adv. Space Res. 2017, 60, 1300–1306. [Google Scholar] [CrossRef]
- Murphy, T.W.; Adelberger, E.G.; Battat, J.B.R.; Hoyle, C.D.; Johnson, N.H.; McMillan, R.J.; Stubbs, C.W.; Swanson, H.E. APOLLO: Millimeter lunar laser ranging. Class. Quantum Gravity 2012, 29, 184005. [Google Scholar] [CrossRef]
- Williams, J.G.; Turyshev, S.G.; Boggs, D.H.; Ratcliff, J.T. Lunar laser ranging science: Gravitational physics and lunar interior and geodesy. Adv. Space Res. 2006, 37, 67–71. [Google Scholar] [CrossRef]
- Battat, J.B.R.; Murphy, T.W.; Adelberger, E.G.; Gillespie, B.; Hoyle, C.D.; McMillan, R.J.; Michelsen, E.L.; Nordtvedt, K.; Orin, A.E.; Stubbs, C.W.; et al. The Apache Point Observatory Lunar Laser-ranging Operation (APOLLO): Two Years of Millimeter-Precision Measurements of the Earth-Moon Range. Publ. Astron. Soc. Pac. 2009, 121, 29. [Google Scholar] [CrossRef]
- Fournet, M. Le Réflecteur Laser de Lunokhod; Bowhill, S.A., Jaffe, L.D., Rycroft, M.J., Eds.; 1972; Volume 1; pp. 261–277. Available online: https://ui.adsabs.harvard.edu/abs/1972spre.conf..261F/abstract (accessed on 12 February 2025).
- Bender, P.L.; Currie, D.G.; Poultney, S.K.; Alley, C.O.; Dicke, R.H.; Wilkinson, D.T.; Eckhardt, D.H.; Faller, J.E.; Kaula, W.M.; Mulholland, J.D.; et al. The Lunar Laser Ranging Experiment. Science 1973, 182, 229–238. [Google Scholar] [CrossRef] [PubMed]
- Murphy, T.; Adelberger, E.; Battat, J.; Hoyle, C.; McMillan, R.; Michelsen, E.; Samad, R.; Stubbs, C.; Swanson, H. Long-term degradation of optical devices on the Moon. Icarus 2010, 208, 31–35. [Google Scholar] [CrossRef]
- Degnan, J.J. Millimeter Accuracy Satellite Laser Ranging: A Review; American Geophysical Union (AGU): Washington, DC, USA, 2013; pp. 133–162. [Google Scholar]
- Williams, J.G.; Porcelli, L.; Dell’Agnello, S.; Mauro, L.; Muccino, M.; Currie, D.G.; Wellnitz, D.; Wu, C.; Boggs, D.H.; Johnson, N.H. Lunar Laser Ranging Retroreflectors: Velocity Aberration and Diffraction Pattern. Planet. Sci. J. 2023, 4, 89. [Google Scholar] [CrossRef]
- Dell’Agnello, S.; Delle Monache, G.; Currie, D.; Vittori, R.; Cantone, C.; Garattini, M.; Boni, A.; Martini, M.; Lops, C.; Intaglietta, N.; et al. Creation of the new industry-standard space test of laser retroreflectors for the GNSS and LAGEOS. Adv. Space Res. 2011, 47, 822–842. [Google Scholar] [CrossRef]
- NASA Selects Intuitive Machines for New Lunar Science Delivery. Available online: https://www.nasa.gov/news-release/nasa-selects-intuitive-machines-for-new-lunar-science-delivery/ (accessed on 1 August 2024).
- Dell’Agnello, S.; Maiello, M.; Currie, D.; Boni, A.; Berardi, S.; Cantone, C.; Delle Monache, G.; Intaglietta, N.; Lops, C.; Garattini, M.; et al. Probing General Relativity and New Physics with Lunar Laser Ranging. NIMA 2012, 692, 275–279. [Google Scholar] [CrossRef]
- Porcelli, L.; Currie, D.G.; Muccino, M.; Dell’Agnello, S.; Wellnitz, D.; Villoresi, P.; Vallone, G.; Capozziello, S.; Carpenter, J.; Boersma, N.; et al. Next Generation Lunar Laser Retroreflectors for Fundamental Physics and Lunar Science, Topical White Paper Submitted to the Committee on the Biological and Physical Sciences Research in Space 2023–2032 of The National Academies of Sciences of the USA, October 2021. Available online: https://science.nasa.gov/biological-physical/resources/whitepapers/ (accessed on 1 August 2024).
- Battat, J.B.R.; Adelberger, E.; Colmenares, N.R.; Farrah, M.; Gonzales, D.P.; Hoyle, C.D.; McMillan, R.J.; Murphy, T.W.; Sabhlok, S.; Stubbs, C.W. Fifteen Years of Millimeter Accuracy Lunar Laser Ranging with APOLLO: Data Set Characterization. Publ. Astron. Soc. Pac. 2023, 135, 104504. [Google Scholar] [CrossRef]
- March, R.; Bellettini, G.; Tauraso, R.; Dell’Agnello, S. Constraining spacetime torsion with the Moon and Mercury. PRD 2011, 83, 104008. [Google Scholar] [CrossRef]
- Capozziello, S.; D’Agostino, R.; Luongo, O. Extended gravity cosmography. IJMPD 2019, 28, 1930016. [Google Scholar] [CrossRef]
- March, R.; Bertolami, O.; Muccino, M.; Gomes, C.; Dell’Agnello, S. Cassini and extra force constraints to nonminimally coupled gravity with a screening mechanism. PRD 2022, 105, 44048. [Google Scholar] [CrossRef]
- March, R.; Páramos, J.; Bertolami, O.; Dell’Agnello, S. The 1/c expansion of nonminimally coupled curvature-matter gravity model and constraints from planetary precession. Phys. Rev. D 2017, 95, 24017. [Google Scholar] [CrossRef]
- March, R.; Bertolami, O.; Muccino, M.; Dell’Agnello, S. Equivalence principle violation in nonminimally coupled gravity and constraints from lunar laser ranging. Phys. Rev. D 2024, 109, 124013. [Google Scholar] [CrossRef]
- Bourgoin, A.; Hees, A.; Bouquillon, S.; Le Poncin-Lafitte, C.; Francou, G.; Angonin, M.C. Testing Lorentz symmetry with lunar laser ranging. Phys. Rev. Lett. 2016, 117, 241301. [Google Scholar] [CrossRef] [PubMed]
- Branchesi, M.; Falanga, M.; Harms, J.; Jani, K.; Katsanevas, S.; Lognonné, P.; Badaracco, F.; Cacciapuoti, L.; Cappellaro, E.; Dell’Agnello, S.; et al. Lunar Gravitational-Wave Detection. Space Sci. Rev. 2023, 219, 67. [Google Scholar] [CrossRef]
- Williams, J.G.; Boggs, D.H. Tides on the Moon: Theory and determination of dissipation. J. Geophys. Res. Planets 2015, 120, 689–724. [Google Scholar] [CrossRef]
- Haviland, H.F.; Weber, R.C.; Neal, C.R.; Lognonné, P.; Garcia, R.F.; Schmerr, N.; Nagihara, S.; Grimm, R.; Currie, D.G.; Dell’Agnello, S.; et al. The Lunar Geophysical Network Landing Sites Science Rationale. Planet. Sci. J. 2022, 3, 40. [Google Scholar] [CrossRef]
- Shapiro, I.I.; Reasenberg, R.D.; Chandler, J.F.; Babcock, R.W. Measurement of the de Sitter Precession of the Moon: A Relativistic Three-Body Effect. Phys. Rev. Lett. 1988, 61, 2643. [Google Scholar] [CrossRef]
- Biskupek, L.; Müller, J.; Torre, J.-M. Benefit of New High-Precision LLR Data for the Determination of Relativistic Parameters. Universe 2021, 7, 34. [Google Scholar] [CrossRef]
- Huang, K.; Yang, Y.; Tang, R.; Cao, J.; Muccino, M.; Porcelli, L.; Dell’Agnello, S.; Li, Y. Review of the Development of Lunar Laser Ranging, Review of the Development of Lunar Laser Ranging. Astron. Tech. Instrum. 2024, 1, 295–306. [Google Scholar] [CrossRef]
- Bassi, A.; Cacciapuoti, L.; Capozziello, S.; Dell’Agnello, S.; Diamanti, E.; Giulini, D.; Iess, L.; Jetzer, P.; Joshi, S.K.; Landragin, A.; et al. A way forward for fundamental physics in space. NPJ Microgravity 2022, 8, 49. [Google Scholar] [CrossRef] [PubMed]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Muccino, M.; Montanari, M.; Lauretani, R.; Remujo Castro, A.; Rubino, L.; Denni, U.; Rodriquez, R.; Salvatori, L.; Tibuzzi, M.; Filomena, L.; et al. MoonLIGHT and MPAc: The European Space Agency’s Next-Generation Lunar Laser Retroreflector for NASA’s CLPS/PRISM1A (CP-11) Mission. Remote Sens. 2025, 17, 813. https://doi.org/10.3390/rs17050813
Muccino M, Montanari M, Lauretani R, Remujo Castro A, Rubino L, Denni U, Rodriquez R, Salvatori L, Tibuzzi M, Filomena L, et al. MoonLIGHT and MPAc: The European Space Agency’s Next-Generation Lunar Laser Retroreflector for NASA’s CLPS/PRISM1A (CP-11) Mission. Remote Sensing. 2025; 17(5):813. https://doi.org/10.3390/rs17050813
Chicago/Turabian StyleMuccino, Marco, Michele Montanari, Rudi Lauretani, Alejandro Remujo Castro, Laura Rubino, Ubaldo Denni, Raffaele Rodriquez, Lorenzo Salvatori, Mattia Tibuzzi, Luciana Filomena, and et al. 2025. "MoonLIGHT and MPAc: The European Space Agency’s Next-Generation Lunar Laser Retroreflector for NASA’s CLPS/PRISM1A (CP-11) Mission" Remote Sensing 17, no. 5: 813. https://doi.org/10.3390/rs17050813
APA StyleMuccino, M., Montanari, M., Lauretani, R., Remujo Castro, A., Rubino, L., Denni, U., Rodriquez, R., Salvatori, L., Tibuzzi, M., Filomena, L., Mauro, L., Currie, D., Bargiacchi, G., Battista, E., Capozziello, S., Maiello, M., Porcelli, L., Delle Monache, G., & Dell’Agnello, S. (2025). MoonLIGHT and MPAc: The European Space Agency’s Next-Generation Lunar Laser Retroreflector for NASA’s CLPS/PRISM1A (CP-11) Mission. Remote Sensing, 17(5), 813. https://doi.org/10.3390/rs17050813