
Adopting an Open-Source Processing Strategy for LiDAR Drone Data Analysis in Under-Canopy Archaeological Sites: A Case Study of Torre Castiglione (Apulia)

 ,
,  ,
, 
 ,
,  ,
, 

Abstract
1. Introduction
2. Materials and Methods
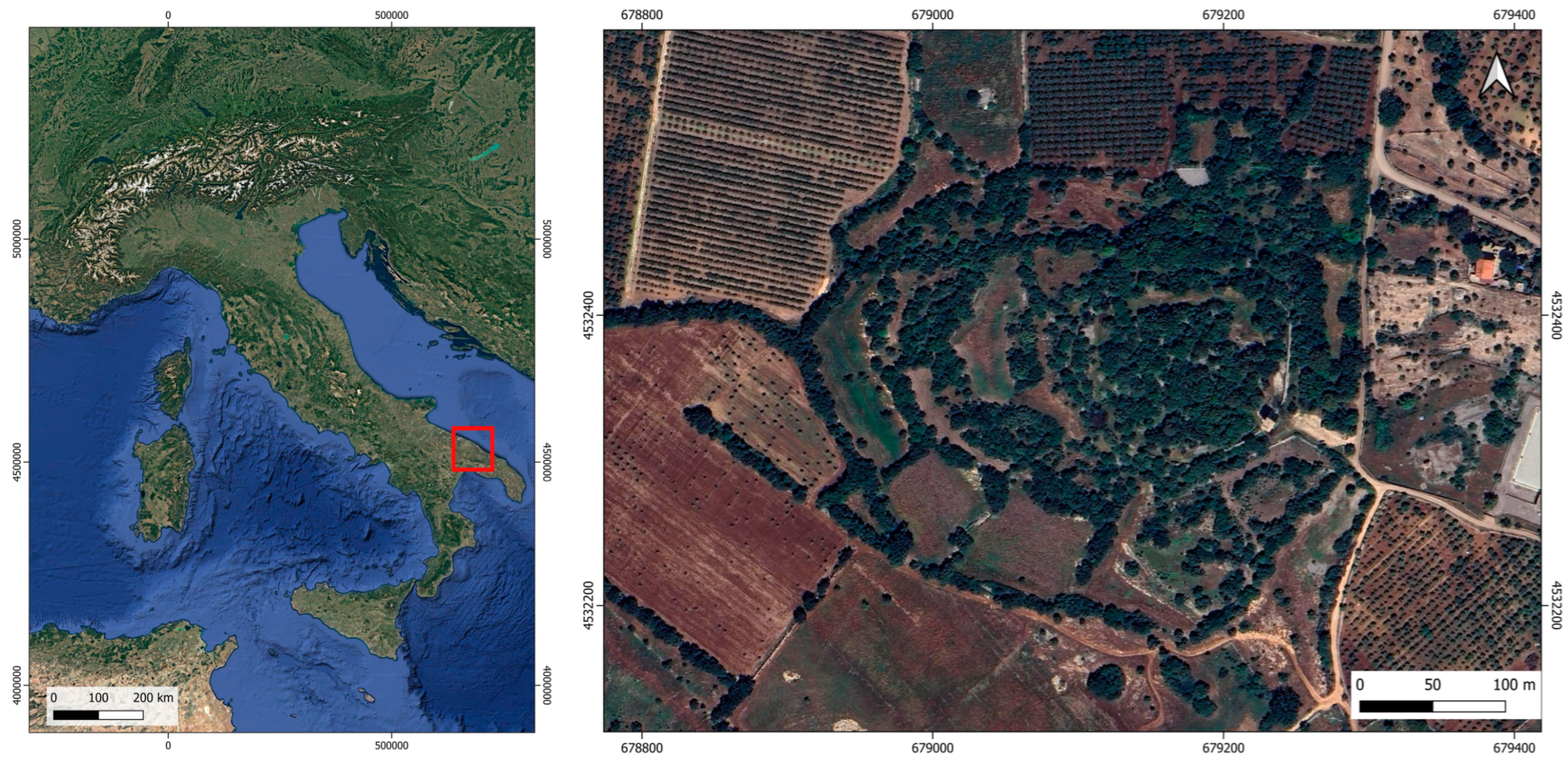
2.1. Study Area
2.2. Rationale and Approach
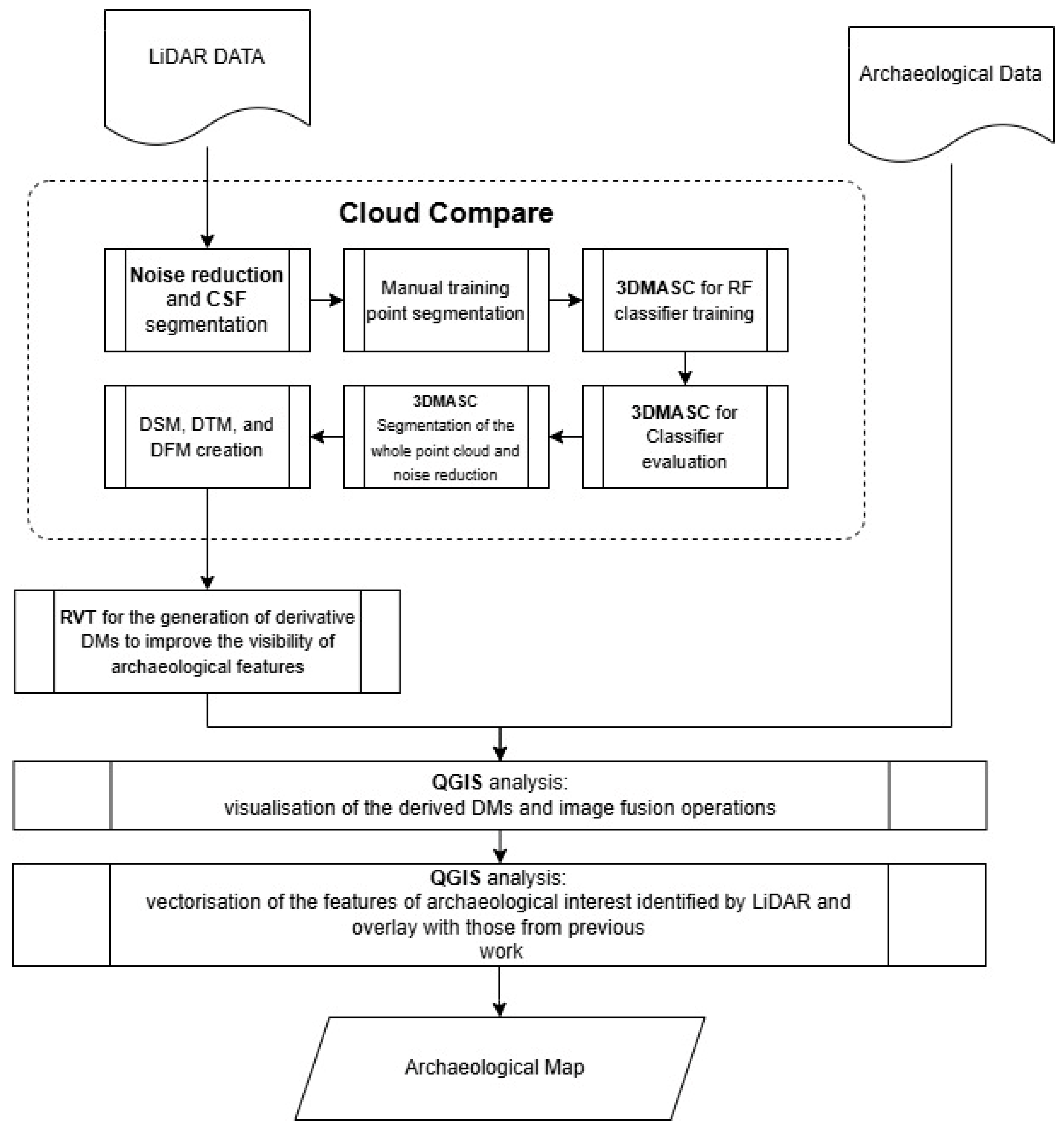
2.2.1. Processing and Segmentation of LiDAR Data from UAVs Using a Probabilistic Supervised Machine Learning Algorithm
- (1)
- Remove outliers and resample the point cloud with minimum point spacing of 0.1 m;
- (2)
- Segment the ‘ground’ from the ‘off-ground’ using a CSF filter (Cloth Simulation Filter);
- (3)
- Manually segment a small portion of the ‘off-ground’ point cloud;
- (4)
- Train a classification algorithm based on probabilistic machine learning (Random Forest) using the 3DMASC plug-in;
- (5)
- Evaluate the classification algorithm;
- (6)
- Apply classification to the entire off-ground point cloud;
- (7)
- Application of CloudCompare’s ‘split’ function to divide ‘vegetation’ points from ‘non-vegetation’ points;
- (8)
- Clean up the ‘non-vegetation’ cloud through the use of a SOR (Statistical Outlier Removal) and noise filter to remove misclassified points;
- (9)
- Merge the ‘ground’ point cloud with the classified point cloud (without vegetation and noise) and obtain the data from which to extract the DFM;
- (10)
- Generate DTM, DSM, and DFM at 0.2 m/pixel resolution.
2.2.2. DFM Enhancement Methods for Understanding Archaeological Features
- (1)
- The following elements were overlapped in this layer order: (i) SLRM (fusion mode: multiply, brightness: +50, contrast: +40, transparency: 40%); (ii) archaeological (VAT) (fusion mode: multiply, brightness: +80, contrast: 0, transparency: 100%); (iii) MSTP (fusion mode: add, brightness: +40, contrast: +15, transparency: 100%); and (iv) MSRM (fusion mode: normal, brightness: 0, contrast: +50, transparency: 100%);
- (2)
- The following data were superimposed in this layer order: (i) DFM (Fusion Mode: multiply, brightness: 0, contrast: 0, saturation: 30, transparency: 100%); (ii) slope (fusion mode: multiply, brightness: +80, contrast: 0, saturation: 0, transparency: 100%); (iii) LD (fusion mode: multiply, brightness: +80, contrast: 0, saturation: 0, transparency: 100%); and (iv) Multi-HS (fusion mode: multiply, brightness: +50, contrast: 0, saturation: 0, transparency: 100%);
- (3)
- The following elements were overlapped in this layer order: (i) slope (fusion mode: multiply, brightness: 0, contrast: 0, transparency: 100%); (ii) HS (fusion mode: multiply, brightness: +100, contrast: 0, transparency: 100%); and (iii) LD (fusion mode: normal, brightness: +100, contrast: 0, transparency: 100%).
3. Results
- (i)
- 80.1% of the low vegetation samples,
- (ii)
- 99.4% of the high vegetation samples;
- (iii)
- 89.6% of the building samples.
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Küçükdemirci, M.; Landeschi, G.; Ohlsson, M.; Dell’Unto, N. Investigating Ancient Agricultural Field Systems in Sweden from Airborne LIDAR Data by Using Convolutional Neural Network. Archaeol. Prospect. 2022, 30, arp.1886. [Google Scholar] [CrossRef]
- Lozić, E.; Štular, B. Documentation of Archaeology-Specific Workflow for Airborne LiDAR Data Processing. Geosciences 2021, 11, 26. [Google Scholar] [CrossRef]
- Štular, B.; Eichert, S.; Lozić, E. Airborne LiDAR Point Cloud Processing for Archaeology. Pipeline and QGIS Toolbox. Remote Sens. 2021, 13, 3225. [Google Scholar] [CrossRef]
- Štular, B.; Lozić, E.; Eichert, S. Airborne LiDAR-Derived Digital Elevation Model for Archaeology. Remote Sens. 2021, 13, 1855. [Google Scholar] [CrossRef]
- Lohani, B.; Ghosh, S. Airborne LiDAR Technology: A Review of Data Collection and Processing Systems. Proc. Natl. Acad. Sci. India Sect. A Phys. Sci. 2017, 87, 567–579. [Google Scholar] [CrossRef]
- Habib, A.F. Airborne Lidar Mapping: Current Status and Future Challenges. Geomatica 2009, 63, 224–226. [Google Scholar] [CrossRef]
- Krabill, W.; Collins, J.G.; Link, L.; Swift, R.; Butler, M. Airborne Laser Topographic Mapping Results. Photogramm. Eng. Remote Sens. 1984, 50, 685–694. [Google Scholar]
- Guan, S.; Zhu, Z.; Wang, G. A Review on UAV-Based Remote Sensing Technologies for Construction and Civil Applications. Drones 2022, 6, 117. [Google Scholar] [CrossRef]
- Wang, R.; Peethambaran, J.; Chen, D. LiDAR Point Clouds to 3-D Urban Models: A Review. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 606–627. [Google Scholar] [CrossRef]
- RITCHIE, J.C. Remote Sensing Applications to Hydrology: Airborne Laser Altimeters. Hydrol. Sci. J. 1996, 41, 625–636. [Google Scholar] [CrossRef]
- Hickman, G.D.; Hogg, J.E. Application of an Airborne Pulsed Laser for near Shore Bathymetric Measurements. Remote Sens. Environ. 1969, 1, 47–58. [Google Scholar] [CrossRef]
- Mazlan, S.M.; Wan Mohd Jaafar, W.S.; Muhmad Kamarulzaman, A.M.; Saad, S.N.M.; Mohd Ghazali, N.; Adrah, E.; Abdul Maulud, K.N.; Omar, H.; Teh, Y.A.; Dzulkifli, D.; et al. A Review on the Use of LiDAR Remote Sensing for Forest Landscape Restoration. In Concepts and Applications of Remote Sensing in Forestry; Suratman, M.N., Ed.; Springer Nature: Singapore, 2022; pp. 49–74. ISBN 978-981-19419-9-3. [Google Scholar]
- Stott, D.; Boyd, D.; Beck, A.; Cohn, A. Airborne LiDAR for the Detection of Archaeological Vegetation Marks Using Biomass as a Proxy. Remote Sens. 2015, 7, 1594–1618. [Google Scholar] [CrossRef]
- Guo, Q.; Su, Y.; Hu, T. LiDAR Principles, Processing and Applications in Forest Ecology; Academic Press: London, UK; San Diego, CA, USA, 2023; ISBN 978-0-12-823894-3. [Google Scholar]
- Vinci, G.; Vanzani, F.; Fontana, A.; Campana, S. LiDAR Applications in Archaeology: A Systematic Review. Archaeol. Prospect. 2024, 32, arp.1931. [Google Scholar] [CrossRef]
- Chase, A.F.; Chase, D.Z.; Weishampel, J.F.; Drake, J.B.; Shrestha, R.L.; Slatton, K.C.; Awe, J.J.; Carter, W.E. Airborne LiDAR, Archaeology, and the Ancient Maya Landscape at Caracol, Belize. J. Archaeol. Sci. 2011, 38, 387–398. [Google Scholar] [CrossRef]
- Doneus, M.; Briese, C.; Fera, M.; Janner, M. Archaeological Prospection of Forested Areas Using Full-Waveform Airborne Laser Scanning. J. Archaeol. Sci. 2008, 35, 882–893. [Google Scholar] [CrossRef]
- Evans, D.; Traviglia, A. Uncovering Angkor: Integrated Remote Sensing Applications in the Archaeology of Early Cambodia. In Satellite Remote Sensing; Lasaponara, R., Masini, N., Eds.; Remote Sensing and Digital Image Processing; Springer: Dordrecht, The Netherlands, 2012; Volume 16, pp. 197–230. ISBN 978-90-481-8800-0. [Google Scholar]
- Casana, J.; Laugier, E.J.; Hill, A.C.; Reese, K.M.; Ferwerda, C.; McCoy, M.D.; Ladefoged, T. Exploring Archaeological Landscapes Using Drone-Acquired Lidar: Case Studies from Hawai’i, Colorado, and New Hampshire, USA. J. Archaeol. Sci. Rep. 2021, 39, 103133. [Google Scholar] [CrossRef]
- Balsi, M.; Esposito, S.; Fallavollita, P.; Melis, M.G.; Milanese, M. Preliminary Archeological Site Survey by UAV-Borne Lidar: A Case Study. Remote Sens. 2021, 13, 332. [Google Scholar] [CrossRef]
- Chase, A.; Chase, D.; Chase, A. LiDAR for Archaeological Research and the Study of Historical Landscapes. In Geotechnologies and the Environment; Springer: Berlin/Heidelberg, Germany, 2017; pp. 89–100. ISBN 978-3-319-50516-9. [Google Scholar]
- Chase, A.; Chase, D.; Chase, A. Ethics, New Colonialism, and Lidar Data: A Decade of Lidar in Maya Archaeology. J. Comput. Appl. Archaeol. 2020, 3, 51–62. [Google Scholar] [CrossRef]
- Devereux, B.J.; Amable, G.S.; Crow, P.; Cliff, A.D. The Potential of Airborne Lidar for Detection of Archaeological Features under Woodland Canopies. Antiquity 2005, 79, 648–660. [Google Scholar] [CrossRef]
- Canuto, M.A.; Estrada-Belli, F.; Garrison, T.G.; Houston, S.D.; Acuña, M.J.; Kováč, M.; Marken, D.; Nondédéo, P.; Auld-Thomas, L.; Castanet, C.; et al. Ancient Lowland Maya Complexity as Revealed by Airborne Laser Scanning of Northern Guatemala. Science 2018, 361, eaau0137. [Google Scholar] [CrossRef]
- Rosenswig, R.M.; López-Torrijos, R. Lidar Reveals the Entire Kingdom of Izapa during the First Millennium BC. Antiquity 2018, 92, 1292–1309. [Google Scholar] [CrossRef]
- Johnson, K.M.; Ouimet, W.B. Rediscovering the Lost Archaeological Landscape of Southern New England Using Airborne Light Detection and Ranging (LiDAR). J. Archaeol. Sci. 2014, 43, 9–20. [Google Scholar] [CrossRef]
- Masini, N.; Gizzi, F.; Biscione, M.; Fundone, V.; Sedile, M.; Sileo, M.; Pecci, A.; Lacovara, B.; Lasaponara, R. Medieval Archaeology Under the Canopy with LiDAR. The (Re)Discovery of a Medieval Fortified Settlement in Southern Italy. Remote Sens. 2018, 10, 1598. [Google Scholar] [CrossRef]
- Masini, N.; Lasaponara, R. On the Reuse of Multiscale LiDAR Data to Investigate the Resilience in the Late Medieval Time: The Case Study of Basilicata in South of Italy. J. Archaeol. Method Theory 2021, 28, 1172–1199. [Google Scholar] [CrossRef]
- Danese, M.; Gioia, D.; Vitale, V.; Abate, N.; Amodio, A.M.; Lasaponara, R.; Masini, N. Pattern Recognition Approach and LiDAR for the Analysis and Mapping of Archaeological Looting: Application to an Etruscan Site. Remote Sens. 2022, 14, 1587. [Google Scholar] [CrossRef]
- Masini, N.; Abate, N.; Gizzi, F.T.; Vitale, V.; Minervino Amodio, A.; Sileo, M.; Biscione, M.; Lasaponara, R.; Bentivenga, M.; Cavalcante, F. UAV LiDAR Based Approach for the Detection and Interpretation of Archaeological Micro Topography under Canopy—The Rediscovery of Perticara (Basilicata, Italy). Remote Sens. 2022, 14, 6074. [Google Scholar] [CrossRef]
- Vinci, G.; Bernardini, F. Reconstructing the Protohistoric Landscape of Trieste Karst (North-Eastern Italy) through Airborne LiDAR Remote Sensing. J. Archaeol. Sci. Rep. 2017, 12, 591–600. [Google Scholar] [CrossRef]
- Ladefoged, T.N.; McCoy, M.D.; Asner, G.P.; Kirch, P.V.; Puleston, C.O.; Chadwick, O.A.; Vitousek, P.M. Agricultural Potential and Actualized Development in Hawai’i: An Airborne LiDAR Survey of the Leeward Kohala Field System (Hawai’i Island). J. Archaeol. Sci. 2011, 38, 3605–3619. [Google Scholar] [CrossRef]
- Snitker, G.; Moser, J.D.; Southerlin, B.; Stewart, C. Detecting Historic Tar Kilns and Tar Production Sites Using High-Resolution, Aerial LiDAR-Derived Digital Elevation Models: Introducing the Tar Kiln Feature Detection Workflow (TKFD) Using Open-Access R and FIJI Software. J. Archaeol. Sci. Rep. 2022, 41, 103340. [Google Scholar] [CrossRef]
- Raab, A.; Schneider, A.; Bonhage, A.; Raab, T. Charcoal Burning—A Neglected Soil-Forming Factor in Cultural Landscapes. 2024. Available online: https://www.researchgate.net/publication/380912290_CHARCOAL_BURNING_-_A_NEGLECTED_SOIL-FORMING_FACTOR_IN_CULTURAL_LANDSCAPES (accessed on 10 December 2024).
- Renfrew, C.; Bahn, P.G. Archaeology: Theories, Methods, and Practice; Seventh Edition Revised & Updated; Thames & Hudson: London, UK, 2016; ISBN 978-0-500-29210-5. [Google Scholar]
- Forte, M.; Campana, S.R.L. (Eds.) Digital Methods and Remote Sensing in Archaeology: Archaeology in the Age of Sensing; Quantitative Methods in the Humanities and Social Sciences; Springer International Publishing: Berlin/Heidelberg, Germany, 2016; ISBN 978-3-319-40656-5. [Google Scholar]
- Khan, S.; Aragão, L.; Iriarte, J. A UAV–Lidar System to Map Amazonian Rainforest and Its Ancient Landscape Transformations. Int. J. Remote Sens. 2017, 38, 2313–2330. [Google Scholar] [CrossRef]
- Evans, D. Airborne Laser Scanning as a Method for Exploring Long-Term Socio-Ecological Dynamics in Cambodia. J. Archaeol. Sci. 2016, 74, 164–175. [Google Scholar] [CrossRef]
- Parcero-Oubiña, C.; Nión, S. At Last! Remote-Sensing Discovery of Archaeological Features Through Aerial Imagery and Lidar in Galician Hillforts. 2021. Available online: https://digital.csic.es/handle/10261/268425 (accessed on 10 December 2024).
- Parcero-Oubiña, C. At Last! Discovery of Archaeological Features Through Aerial Imagery and Lidar at Galician Hillforts. 2022. Available online: https://digital.csic.es/handle/10261/305526 (accessed on 10 December 2024).
- Bollandsås, O.; Risbøl, O.; Ene, L.; Nesbakken, A.; Gobakken, T.; Næsset, E. Using Airborne Small-Footprint Laser Scanner Data for Detection of Cultural Remains in Forests: An Experimental Study of the Effects of Pulse Density and DTM Smoothing. J. Archaeol. Sci. 2012, 39, 2733–2743. [Google Scholar] [CrossRef]
- Mazzacca, G.; Grilli, E.; Cirigliano, G.P.; Remondino, F.; Campana, S. Seeing among foliage with lidar and machine learning: Towards a transferable archaeological pipeline. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, XLVI-2/W1-2022, 365–372. [Google Scholar] [CrossRef]
- Campana, S. Drones in Archaeology. State-of-the-Art and Future Perspectives: Drones in Archaeology. Archaeol. Prospect. 2017, 24, 275–296. [Google Scholar] [CrossRef]
- Sánchez, J.G. Archaeological LiDAR in Italy: Enhancing Research with Publicly Accessible Data. Antiquity 2018, 92, e4. [Google Scholar] [CrossRef]
- Fiorucci, M.; Khoroshiltseva, M.; Pontil, M.; Traviglia, A.; Del Bue, A.; James, S. Machine Learning for Cultural Heritage: A Survey. Pattern Recognit. Lett. 2020, 133, 102–108. [Google Scholar] [CrossRef]
- Guyot, A.; Lennon, M.; Lorho, T.; Hubert-Moy, L. Combined Detection and Segmentation of Archeological Structures from LiDAR Data Using a Deep Learning Approach. J. Comput. Appl. Archaeol. 2021, 4, 1. [Google Scholar] [CrossRef]
- Richards-Rissetto, H.; Newton, D.; Al Zadjali, A. A 3D point cloud deep learning approach using lidar to identify ancient maya archaeological sites. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, VIII-M-1–2021, 133–139. [Google Scholar] [CrossRef]
- Trotter, E.; Fernandes, A.; Fibæk, C.; Keßler, C. Machine Learning for Automatic Detection of Historic Stone Walls Using LiDAR Data. Int. J. Remote Sens. 2022, 43, 2185–2211. [Google Scholar] [CrossRef]
- Briese, C.; Pfeifer, N. Airborne Laser Scanning and Derivation of Digital Terrain Models. In Proceedings of the 5th Conference on Optical 3D Measurement Techniques, Vienna, Austria, 1–4 October 2001; pp. 80–87. [Google Scholar]
- Inomata, T. Lidar, Space, and Time in Archaeology: Promises and Challenges. Annu. Rev. Anthropol. 2024, 53, 75–92. [Google Scholar] [CrossRef]
- Doneus, M.; Briese, C. Full-Waveform Airborne Laser Scanning as a Tool for Archaeological Reconnaissance. In From Space to Place; Archeopress: Oxford, UK, 2015; pp. 99–106. [Google Scholar]
- Buján, S.; Cordero, M.; Miranda, D. Hybrid Overlap Filter for LiDAR Point Clouds Using Free Software. Remote Sens. 2020, 12, 1051. [Google Scholar] [CrossRef]
- Pfeifer, N.; Mandlburger, G. Lidar Data Filtering and Digital Terrain Model Generation; CRC Press: Boca Raton, FL, USA, 2018; pp. 349–378. [Google Scholar]
- Štular, B.; Lozić, E. Comparison of Filters for Archaeology-Specific Ground Extraction from Airborne LiDAR Point Clouds. Remote Sens. 2020, 12, 3025. [Google Scholar] [CrossRef]
- Suleymanoglu, B.; Soycan, M. Comparison of Filtering Algorithms Used for DTM Production from Airborne Lidar Data: A Case Study in Bergama, Turkey. Geod. Vestn. 2019, 63, 395–414. [Google Scholar] [CrossRef]
- Kokalj, Ž.; Zakšek, K.; Oštir, K.; Pehani, P.; Čotar, K.; Somrak, M. Relief Visualization Toolbox, Ver. 2.2.1 Manual. Remote Sens. 2016, 3, 398–415. [Google Scholar]
- Zakšek, K.; Oštir, K.; Kokalj, Ž. Sky-View Factor as a Relief Visualization Technique. Remote Sens. 2011, 3, 398–415. [Google Scholar] [CrossRef]
- Kokalj, Ž.; Somrak, M. Why Not a Single Image? Combining Visualizations to Facilitate Fieldwork and On-Screen Mapping. Remote Sens. 2019, 11, 747. [Google Scholar] [CrossRef]
- Miroslav Marin, M. Torre Di Castiglione 1. La Campagna Topografica Del 1981; Grafica Bigiemme: Bari, Italy, 1985; Volume 1. [Google Scholar]
- Caprio, A. Il Megalitismo in Area Italica: Le Mura Antiche Di Conversano e Di Castiglione. Stor. E Cult. Terra Bari 2010, V, 9–14. [Google Scholar]
- Caprio, A. Castiglione. Gli Scavi Degli Anni 1986-87 e 1997. In Norba-Conversano. Archeologia e Storia Della Città e Del Territorio; Adda: Bari, Italy, 2013; pp. 457–478. [Google Scholar]
- Ciancio, A. Il Sito Di Castiglione Tra Conoscenza e Valorizzazione. In Una Finestra Sulla Storia. Un Cavaliere a Castiglione Tra Angioini e Aragonesi; Edizioni Storia Patria: Conversano, Italy, 2017; pp. 22–27. [Google Scholar]
- Caprio, A. Origine e Fine Del Villaggio Rurale Di Castiglione (Conversano). Stor. E Cult. Terra Bari Studi E Ric. 2015, VI, 21–31. [Google Scholar]
- Caprio, A. La Storia Del Casale Attraverso i Dati Della Ricerca Archeologica. In Una Finestra Sulla Storia. Un Cavaliere a Castiglione Tra Angioini e Aragonesi; Edizioni Storia Patria: Conversano, Italy, 2017; pp. 28–36. [Google Scholar]
- Fanizzi, A. Castiglione Nei Documenti. In Una Finestra Sulla Storia. Un Cavaliere a Castiglione Tra Angioini e Aragonesi; Edizioni Storia Patria: Conversano, Italy, 2017; pp. 62–72. [Google Scholar]
- Perfido, P. Castiglione: Un Villaggio Fortificato Di Fondazione Angioina. In Una Finestra Sulla Storia. Un Cavaliere a Castiglione Tra Angioini e Aragonesi; Edizioni Storia Patria: Conversano, Italy, 2017; pp. 37–55. [Google Scholar]
- L’Abbate, V. Dalla ‘Scoperta’ Ottocentesca Alle Indagini Del XX Secolo. In Norba-Conversano. Archeologia e Storia Della Città e Del Territorio; Adda: Bari, Italy, 2013; pp. 437–448. [Google Scholar]
- Degano, E.; Zaccaria, C. Rappresentazioni Cartografiche e Grafiche. In Torre di Castiglione 1. La Campagna Topografica Del 1981; Società di Storia Patria per la Puglia: Bari, Italy, 1985; Volume 5, pp. 39–40. [Google Scholar]
- Adams, R.; Wood, E. Ancient Maya Canals: Grids and Lattices in the Maya Jungle. Archaeology 1982, 35, 28–35. [Google Scholar]
- Banaszek, Ł. LiDARchaeology. Airborne Laser Scanning of the Forested Landscapes around Polanów (Pomerania, Poland). In Aerial Archaeology and Remote Sensing from the Baltic to the Adriatic; Eotvos Lorand University: Budapest, Hungary, 2013; pp. 31–36. [Google Scholar]
- Fernandez-Diaz, J.; Carter, W.; Shrestha, R.; Glennie, C. Now You See It… Now You Don’t: Understanding Airborne Mapping LiDAR Collection and Data Product Generation for Archaeological Research in Mesoamerica. Remote Sens. 2014, 6, 9951–10001. [Google Scholar] [CrossRef]
- Opreanu, C.; Lăzărescu, V.; Roman, A.; Ursu, T.; Farcas, S. New Light on a Roman Fort Based on a LiDAR Survey in the Forested Landscape from Porolissvm. Ephemer. Napoc. 2014, 24, 71–86. [Google Scholar]
- Roussel, J.-R.; Auty, D.; Coops, N.C.; Tompalski, P.; Goodbody, T.R.H.; Meador, A.S.; Bourdon, J.-F.; de Boissieu, F.; Achim, A. lidR: An R Package for Analysis of Airborne Laser Scanning (ALS) Data. Remote Sens. Environ. 2020, 251, 112061. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Corcoran, J.; Knight, J.; Pelletier, K.; Rampi, L.; Wang, Y. The Effects of Point or Polygon Based Training Data on RandomForest Classification Accuracy of Wetlands. Remote Sens. 2015, 7, 4002–4025. [Google Scholar] [CrossRef]
- Letard, M.; Lague, D.; Le Guennec, A.; Lefèvre, S.; Feldmann, B.; Leroy, P.; Girardeau-Montaut, D.; Corpetti, T. 3DMASC: Accessible, Explainable 3D Point Clouds Classification. Application to BI-Spectral TOPO-Bathymetric Lidar Data. ISPRS J. Photogramm. Remote Sens. 2024, 207, 175–197. [Google Scholar] [CrossRef]
- Brodu, N.; Lague, D. 3D Terrestrial Lidar Data Classification of Complex Natural Scenes Using a Multi-Scale Dimensionality Criterion: Applications in Geomorphology. ISPRS J. Photogramm. Remote Sens. 2012, 68, 121–134. [Google Scholar] [CrossRef]
- Hackel, T.; Wegner, J.D.; Schindler, K. Fast semantic segmentation of 3D point clouds with strongly varying density. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, III–3, 177–184. [Google Scholar] [CrossRef]
- Blomley, R.; Jutzi, B.; Weinmann, M. 3D Semantic Labeling of ALS Point Clouds by Exploiting Multi-Scale, Multi-Type Neighborhoods for Feature Extraction. 2016. Available online: https://www.researchgate.net/publication/312948032_3D_semantic_labeling_of_ALS_point_clouds_by_exploiting_multi-scale_multi-type_neighborhoods_for_feature_extraction (accessed on 10 December 2024).
- Tarsha Kurdi, F.; Amakhchan, W.; Gharineiat, Z.; Boulaassal, H.; El Kharki, O. Contribution of Geometric Feature Analysis for Deep Learning Classification Algorithms of Urban LiDAR Data. Sensors 2023, 23, 7360. [Google Scholar] [CrossRef]
- Kokalj, Ž.; Hesse, R. Airborne Laser Scanning Raster Data Visualization; Prostor, kraj, čas; ZRC SAZU, Založba ZRC: Ljubljana, Slovenia, 2017; Volume 14, ISBN 978-961-254-984-8. [Google Scholar]
- Vianello, A.; Cavalli, M.; Tarolli, P. LiDAR-Derived Slopes for Headwater Channel Network Analysis. CATENA 2009, 76, 97–106. [Google Scholar] [CrossRef]
- Hesse, R. LiDAR-derived Local Relief Models—A New Tool for Archaeological Prospection. Archaeol. Prospect. 2010, 17, 67–72. [Google Scholar] [CrossRef]
- Toumazet, J.P.; Simon, F.-X.; Mayoral, A. Self-AdaptIve LOcal Relief Enhancer (SAILORE): A New Filter to Improve Local Relief Model Performances According to Local Topography. Geomatics 2021, 1, 450–463. [Google Scholar] [CrossRef]
- Doneus, M. Openness as Visualization Technique for Interpretative Mapping of Airborne Lidar Derived Digital Terrain Models. Remote Sens. 2013, 5, 6427–6442. [Google Scholar] [CrossRef]
- Lasaponara, R.; Masini, N. Full-Waveform Airborne Laser Scanning for the Detection of Medieval Archaeological Microtopographic Relief. J. Cult. Herit. 2009, 10, e78–e82. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature Name | Abbreviation | Reference |
|---|---|---|
| Number of returns | NBRET | [76] |
| Return number | RETNB | [76] |
| Dip Angle | NORMDIP | [76] |
| Dip Direction | NORMDIPDIR | [76] |
| 1st Principal component analysis | PCA1 | [77] |
| 2nd Principal component analysis | PCA2 | [77] |
| 3rd Principal component analysis | PCA3 | [77] |
| Roughness | ROUGH | [76] |
| Anisotropy measure | ANISO | [76] |
| Sphericity | SPHER | [76] |
| Linearity | LINEA | [76,80] |
| Planarity | PLANA | [76,80] |
| Curvature | CURV | [76,80] |
| First Order Moment | FOM | [76,80] |
| DIP Computed from PCA | DIP | [76,80] |
| DIPDIR Computed from PCA | DIPDIR | [76,80] |
| Visualisation Method | Parameters | References |
|---|---|---|
| Analytical Hill Shading | Sun azimuth (deg): 315, 45 and 0; Sun elevation angle (deg): 35 | [81] |
| Hill Shading from Multiple Directions | Number of directions: 16; Sun elevation angle (deg): 35 | [81] |
| PCA of Hill Shading | Number of components to save: 3 | [81] |
| Slope Gradient | No parameters required | [82] |
| Simple Local Relief Model | Radius for trend assessment (pixel): 20 and 50 | [29,83,84] |
| Sky-View Factor | Number of search directions: 16; search radius (pixel): 10 and 50 | [57] |
| Openness Positive | Number of search directions: 16; search radius (pixel): 10 and 50 | [85] |
| Openness Negative | Number of search directions: 16; search radius (pixel): 10 and 50 | [85] |
| Local Dominance | Minimum radius: 10; Maximum radius: 20 and 50 | [86] |
| Multi Scale Relief Model | Feature minimum: 0.0 m; Feature maximum: 20 m; Scaling factor: 2.0 | [58] |
| Multi Scale topographic Position | Local scale min (px): 1; Local scale max (px): 5; Local scale step (px):1; Lightness: 1.2 Meso scale min (px): 5; Meso scale max (px): 50; Meso scale step (px):5; Broad scale min (px): 50; Broad scale max (px): 500; Broad scale step (px):50 | [58] |
| Visualisation for Archaeological Topography | Sky-view factor: min 0.7–max 1.0, Blending mode: multiply, Opacity: 25%; Openness—positive: min 68.0–max 93.0, Blending mode: overlay, Opacity: 50%; Slope gradient: min 0.0–max 50.0, Blending mode: luminosity, Opacity: 50%; Hillshade: min 0.0–max 1.0; Blending mode: normal; Opacity: 100% | [58] |
| Predicted | |||||||
|---|---|---|---|---|---|---|---|
| Low Veg. | High Veg. | Building | Precision | Recall | F1-Score | ||
| Low Veg. | 11,580 | 2655 | 230 | 0.93 | 0.8 | 0.86 | |
| Real | High Veg. | 478 | 86,665 | 83 | 0.96 | 0.99 | 0.98 |
| Building | 456 | 688 | 9891 | 0.97 | 0.9 | 0.93 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abate, N.; Goffredo, R.; Dato, G.; Minervino Amodio, A.; Loperte, A.; Frisetti, A.; Ciccone, G.; Zaia, S.E.; Sileo, M.; Lasaponara, R.; et al. Adopting an Open-Source Processing Strategy for LiDAR Drone Data Analysis in Under-Canopy Archaeological Sites: A Case Study of Torre Castiglione (Apulia). Remote Sens. 2025, 17, 1134. https://doi.org/10.3390/rs17071134
Abate N, Goffredo R, Dato G, Minervino Amodio A, Loperte A, Frisetti A, Ciccone G, Zaia SE, Sileo M, Lasaponara R, et al. Adopting an Open-Source Processing Strategy for LiDAR Drone Data Analysis in Under-Canopy Archaeological Sites: A Case Study of Torre Castiglione (Apulia). Remote Sensing. 2025; 17(7):1134. https://doi.org/10.3390/rs17071134
Chicago/Turabian StyleAbate, Nicodemo, Roberto Goffredo, Giorgia Dato, Antonio Minervino Amodio, Antonio Loperte, Alessia Frisetti, Gabriele Ciccone, Sara Elettra Zaia, Maria Sileo, Rosa Lasaponara, and et al. 2025. "Adopting an Open-Source Processing Strategy for LiDAR Drone Data Analysis in Under-Canopy Archaeological Sites: A Case Study of Torre Castiglione (Apulia)" Remote Sensing 17, no. 7: 1134. https://doi.org/10.3390/rs17071134
APA StyleAbate, N., Goffredo, R., Dato, G., Minervino Amodio, A., Loperte, A., Frisetti, A., Ciccone, G., Zaia, S. E., Sileo, M., Lasaponara, R., & Masini, N. (2025). Adopting an Open-Source Processing Strategy for LiDAR Drone Data Analysis in Under-Canopy Archaeological Sites: A Case Study of Torre Castiglione (Apulia). Remote Sensing, 17(7), 1134. https://doi.org/10.3390/rs17071134