
Contribution of PPP with Ambiguity Resolution to the Maintenance of Terrestrial Reference Frame




Abstract
1. Introduction
2. Data and Methodology
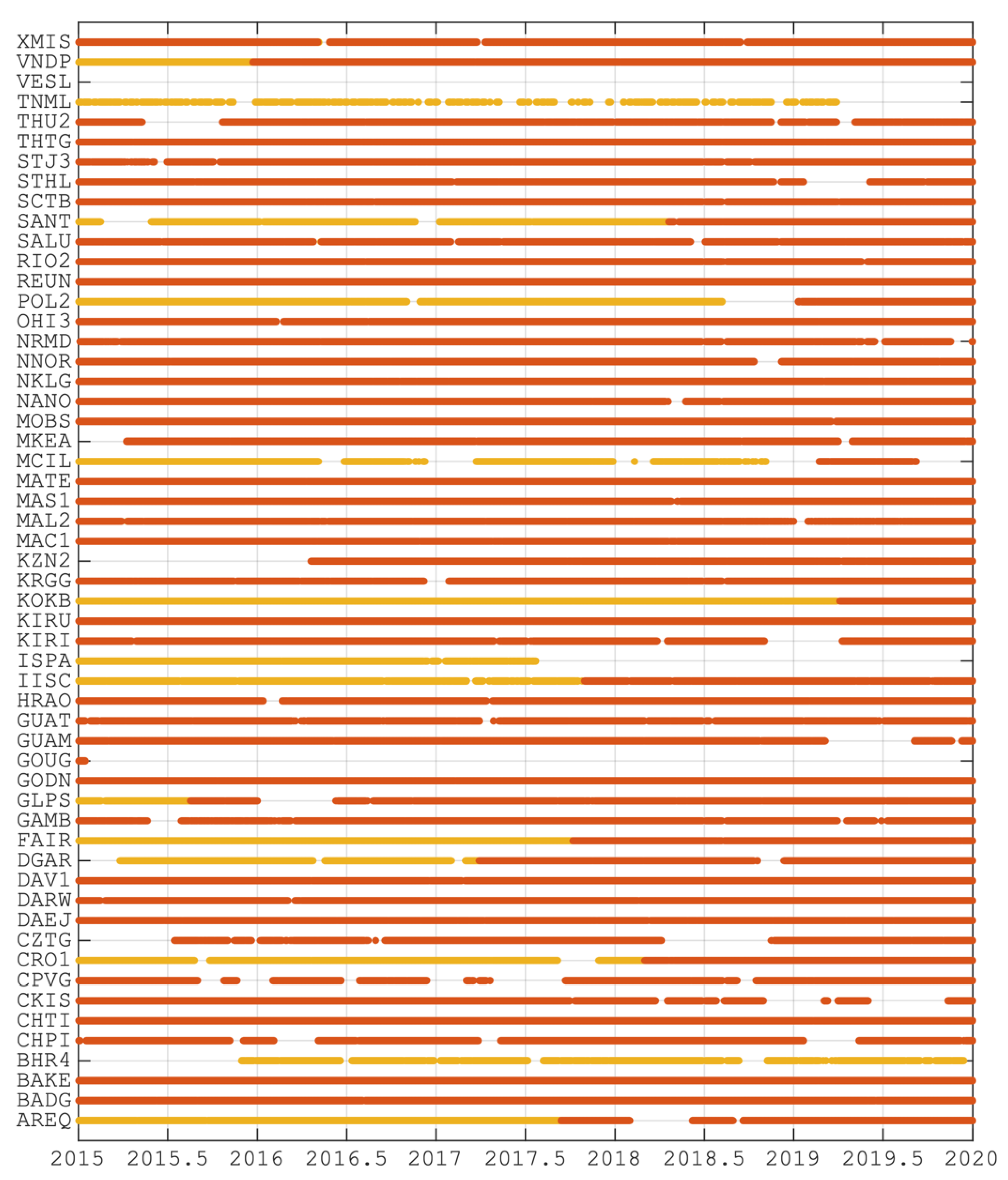
2.1. Data Source
2.2. PPP-AR Strategy
2.3. Position Time Series Processing Strategy
3. Results and Analysis
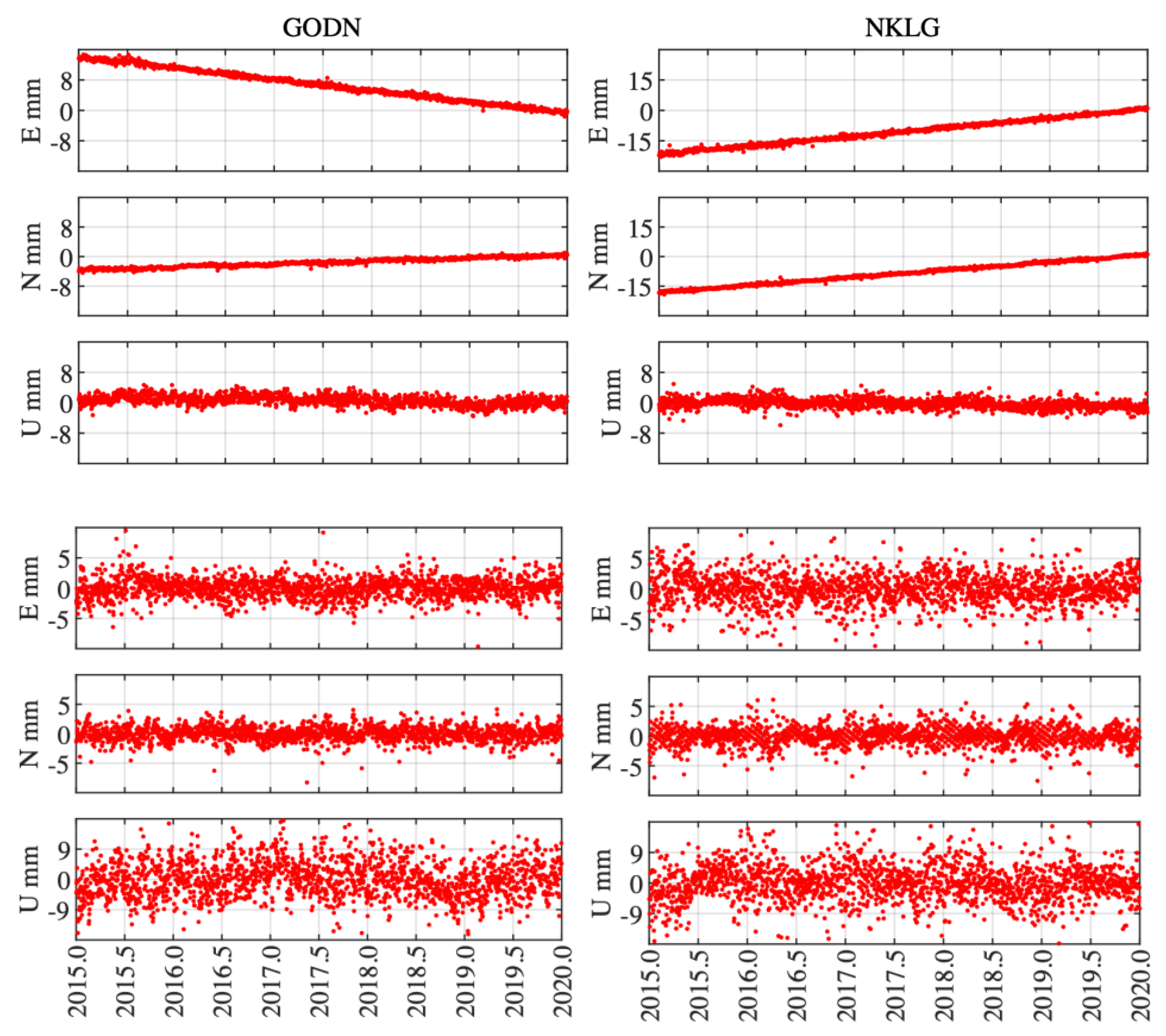
3.1. Station Coordinate
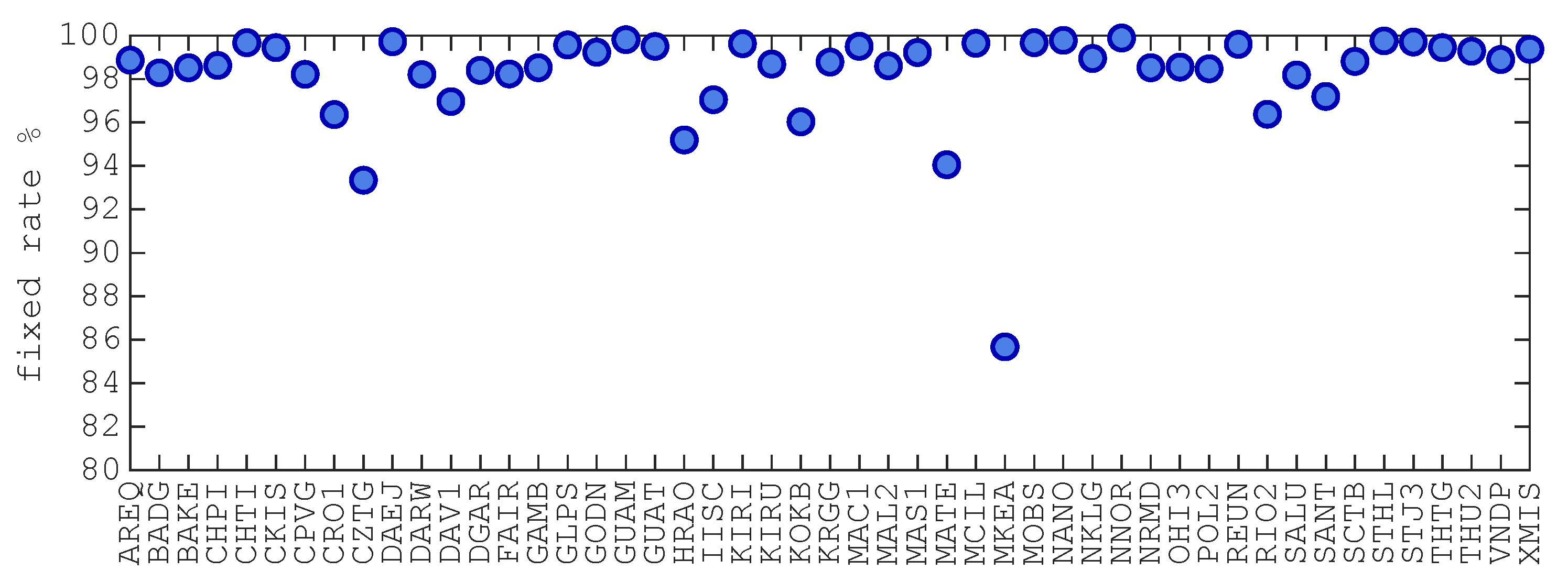
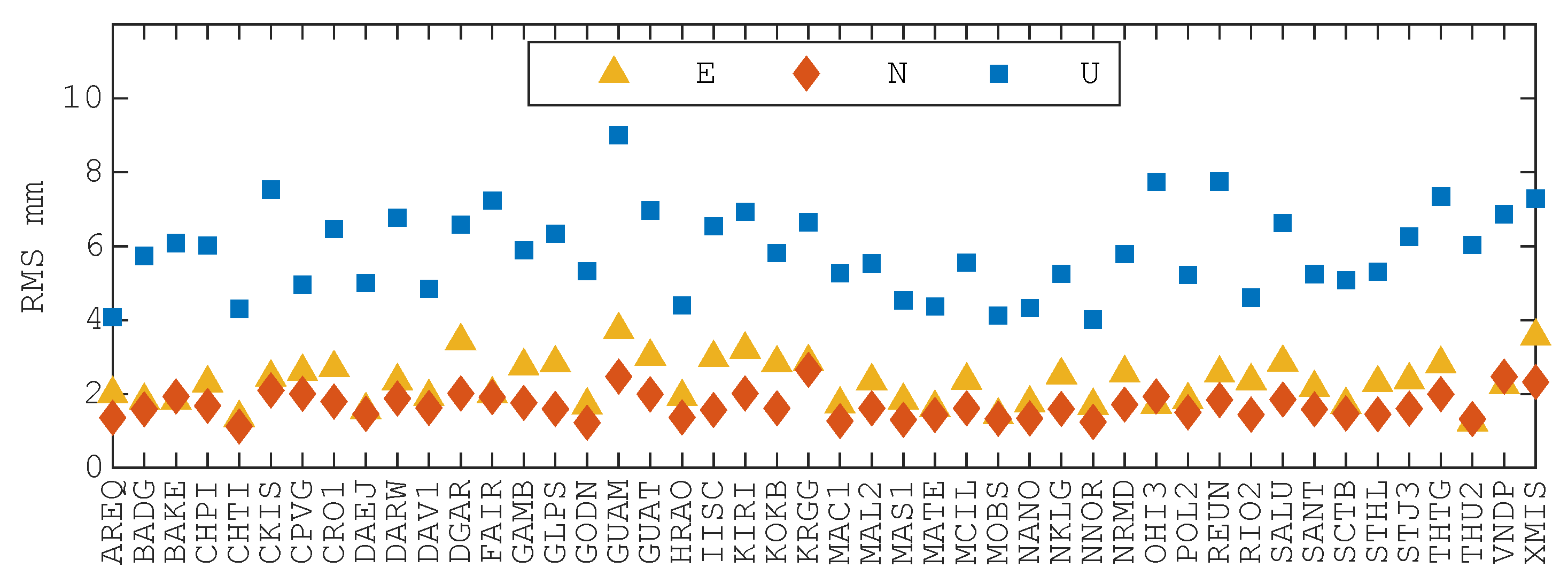
3.1.1. Coordinates Accuracy
3.1.2. Coordinates Comparison with IGS Repro3
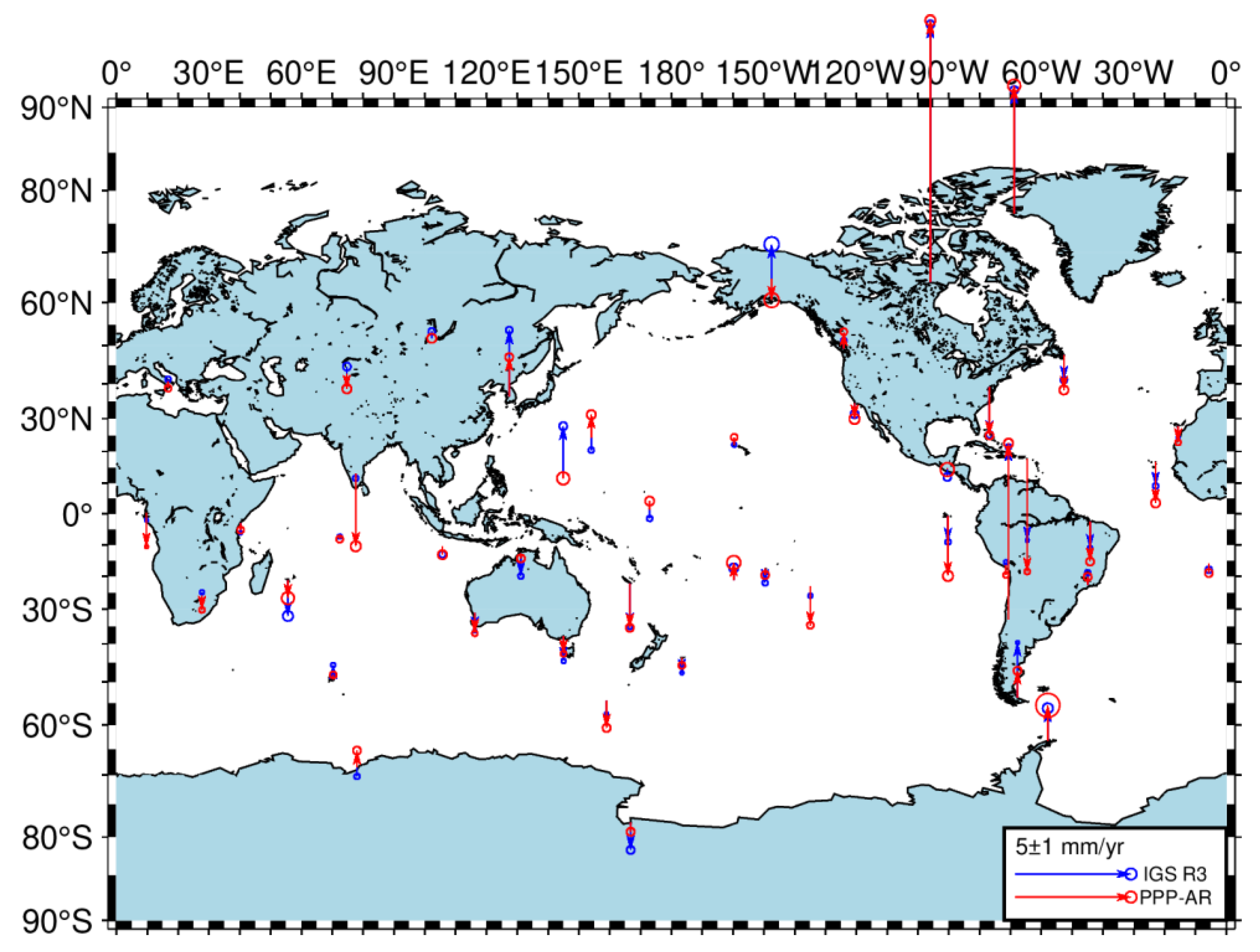
3.2. Velocity Field
3.3. Seasonal Term
3.4. Coordinate Prediction from Velocity and Seasonal Terms
4. Discussion
5. Conclusions
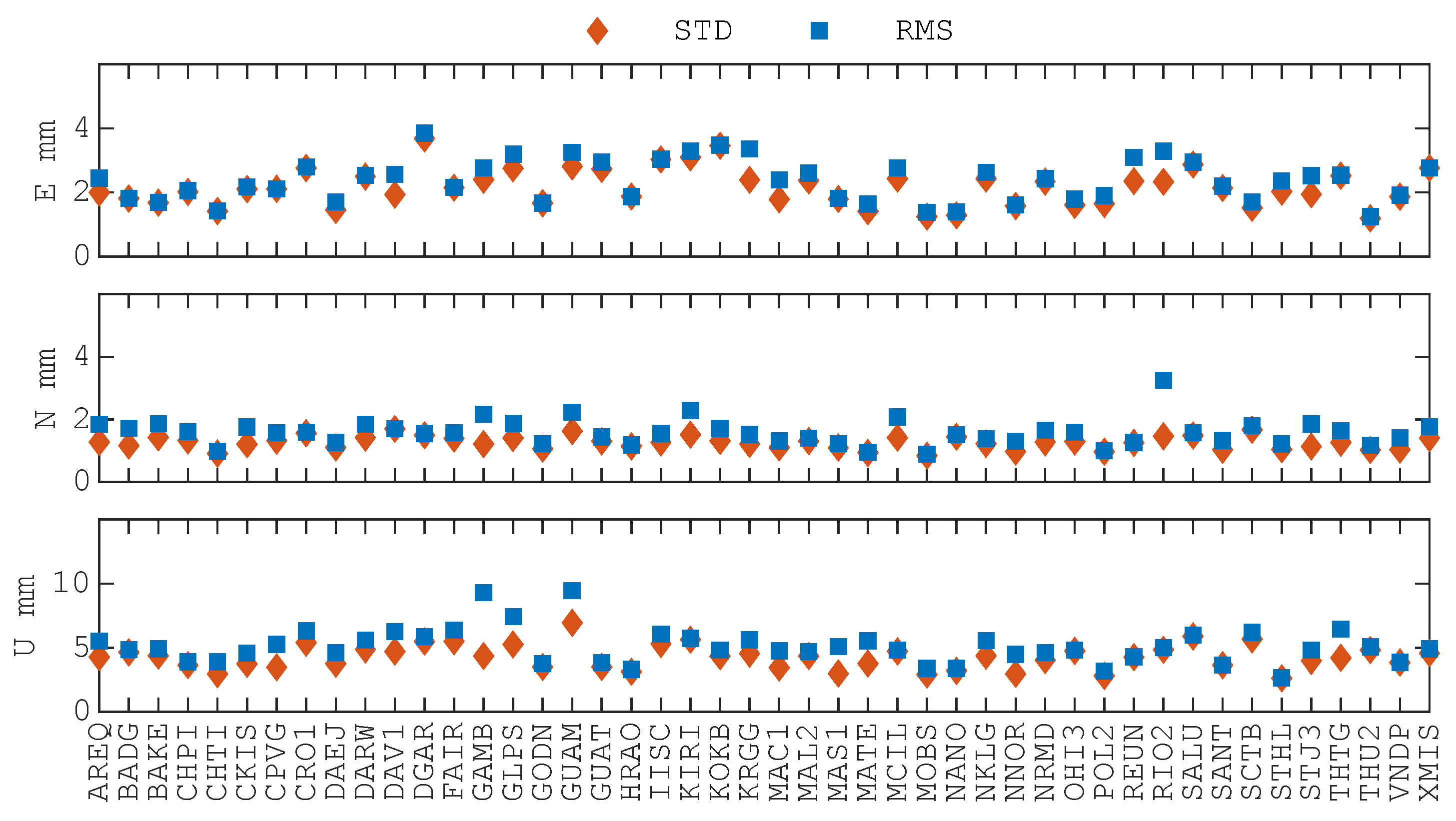
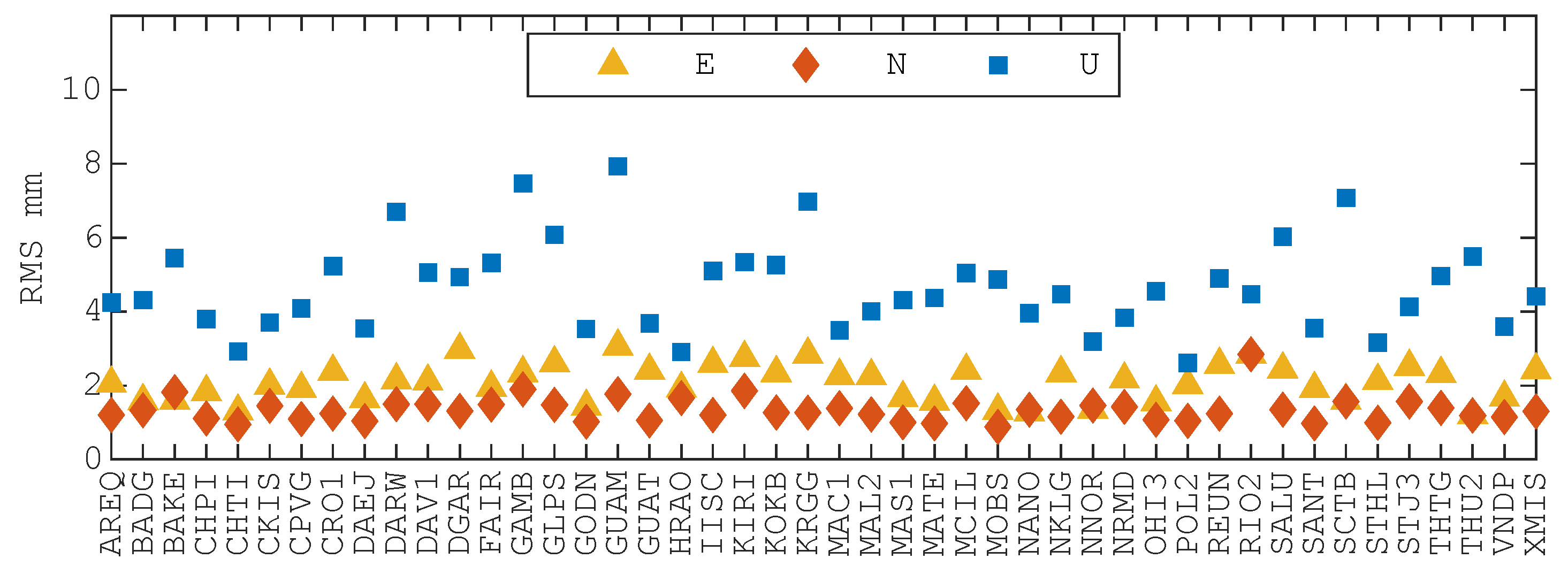
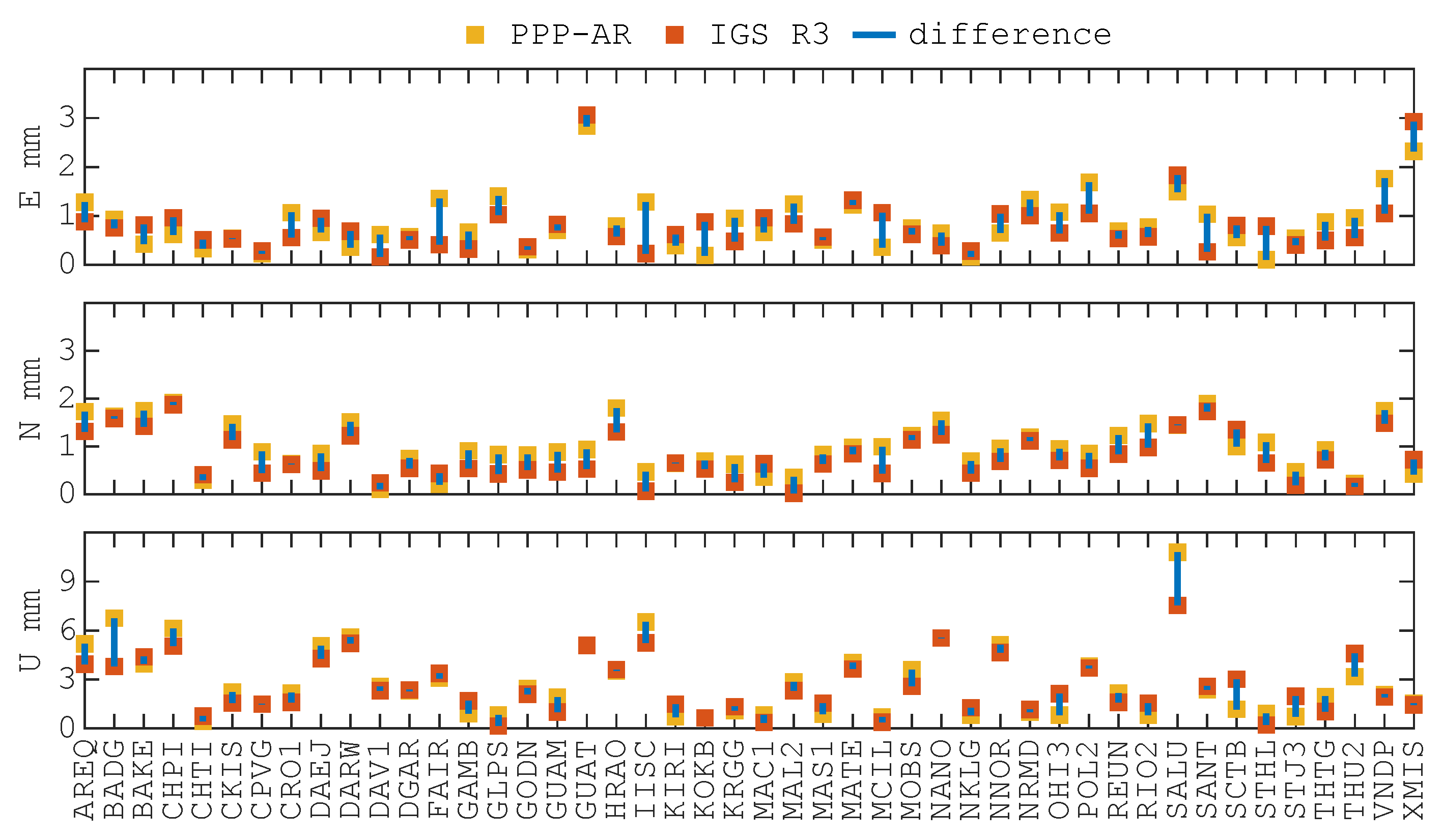
- The average RMS values of residual time series for all stations are within 3 mm in the horizontal direction and within 6 mm in the vertical direction. The average RMSs of the difference between IGS R3 and PPP-AR solutions, after applying Helmert transformation to all stations, are almost within 2 mm in the horizontal direction and within 5 mm in the vertical direction.
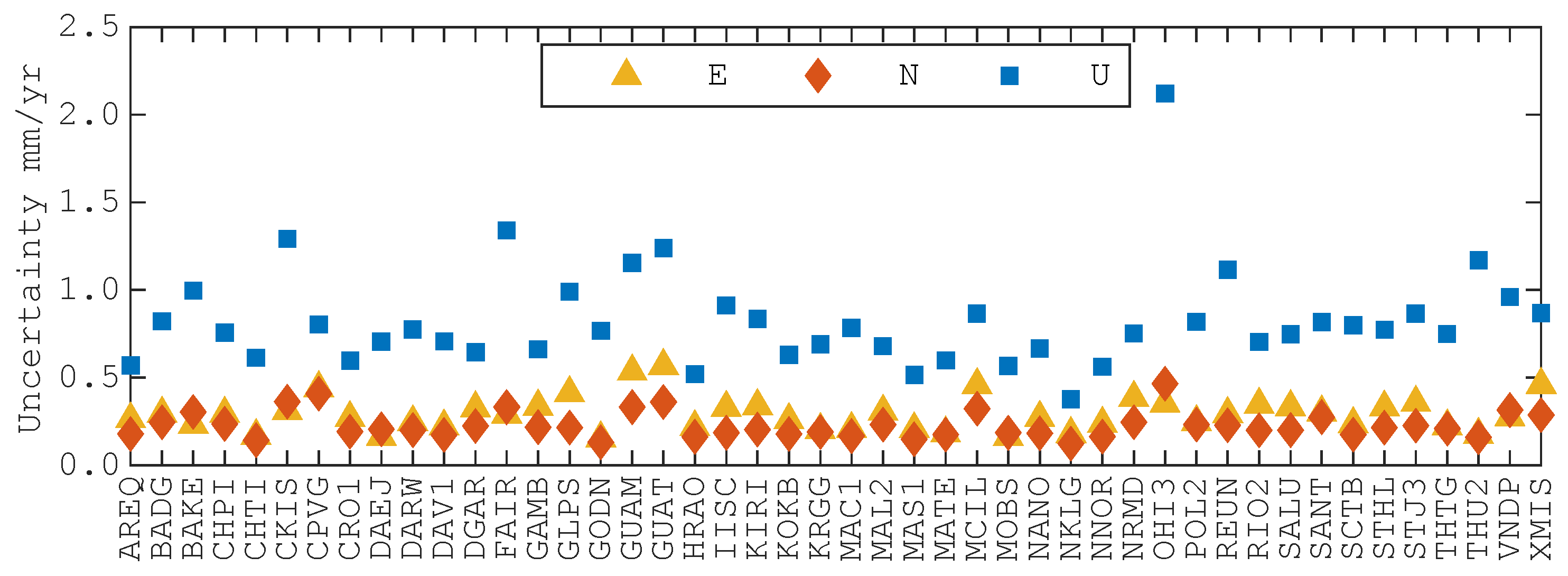
- The uncertainty of velocity derived from PPP-AR solutions is within 0.3 mm/yr for the horizontal direction and 0.9 for the vertical direction. The mean velocity difference between IGS R3 and PPP-AR solutions is within 0.40 mm/yr for horizontal components and within 0.70 mm/yr for vertical components.
- The average annual amplitude differences are within 0.90 mm for all three directions, while the average semi-annual amplitude differences are within 0.50 mm.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Station | Velocity | Station | Velocity | Station | Velocity | Station | Velocity |
|---|---|---|---|---|---|---|---|
| AREQ | 10.07 ±0.26 | FAIR | −7.94 ±0.29 | MAL2 | 26.41 ±0.31 | RIO2 | 5.02 ±0.35 |
| BADG | 26.77 ±0.29 | GAMB | −67.40 ±0.34 | MAS1 | 16.57 ±0.21 | SALU | −3.57 ±0.33 |
| BAKE | −19.15 ±0.23 | GLPS | 50.51 ±0.41 | MATE | 23.56 ±0.18 | SANT | 15.07 ±0.30 |
| CHPI | −3.92 ±0.29 | GODN | −14.76 ±0.15 | MCIL | −71.57 ±0.46 | SCTB | 9.21 ±0.24 |
| CHTI | −40.72 ±0.17 | GUAM | −6.96 ±0.54 | MOBS | 19.22 ±0.16 | STHL | 23.44 ±0.33 |
| CKIS | −62.48 ±0.31 | GUAT | 2.37 ±0.57 | NANO | −8.07 ±0.27 | STJ3 | −13.87 ±0.36 |
| CPVG | 18.53 ±0.44 | HRAO | 17.23 ±0.22 | NKLG | 22.36 ±0.18 | THTG | −65.86 ±0.22 |
| CRO1 | 7.65 ±0.27 | IISC | 42.89 ±0.33 | NNOR | 38.34 ±0.24 | THU2 | −22.77 ±0.18 |
| DAEJ | 27.83 ±0.16 | KIRI | −68.38 ±0.34 | NRMD | 20.95 ±0.39 | VNDP | −41.46 ±0.28 |
| DARW | 35.40 ±0.25 | KOKB | −62.02 ±0.26 | OHI3 | 15.57 ±0.35 | XMIS | 40.87 ±0.46 |
| DAV1 | −3.02 ±0.22 | KRGG | 5.11 ±0.20 | POL2 | 27.51 ±0.25 | ||
| DGAR | 47.46 ±0.33 | MAC1 | −11.88 ±0.21 | REUN | 17.78 ±0.30 |
| Station | Velocity | Station | Velocity | Station | Velocity | Station | Velocity |
|---|---|---|---|---|---|---|---|
| AREQ | 14.42 ±0.18 | FAIR | −21.94 ±0.33 | MAL2 | 15.88 ±0.23 | RIO2 | 12.33 ±0.20 |
| BADG | −6.57 ±0.25 | GAMB | 31.85 ±0.22 | MAS1 | 17.25 ±0.15 | SALU | 13.23 ±0.20 |
| BAKE | −4.29 ±0.31 | GLPS | 11.06 ±0.22 | MATE | 19.53 ±0.18 | SANT | 15.92 ±0.28 |
| CHPI | −12.69 ±0.24 | GODN | 4.19 ±0.13 | MCIL | 24.40 ±0.32 | SCTB | −11.36 ±0.18 |
| CHTI | 33.00 ±0.14 | GUAM | 4.36 ±0.33 | MOBS | 57.35 ±0.19 | STHL | 18.61 ±0.22 |
| CKIS | −35.40 ±0.36 | GUAT | 0.65 ±0.36 | NANO | −8.10 ±0.18 | STJ3 | 13.46 ±0.23 |
| CPVG | 15.27 ±0.41 | HRAO | 18.16 ±0.16 | NKLG | 19.19 ±0.12 | THTG | 33.94 ±0.21 |
| CRO1 | 13.57 ±0.19 | IISC | 35.90 ±0.19 | NNOR | 57.84 ±0.16 | THU2 | 4.81 ±0.16 |
| DAEJ | −10.72 ±0.21 | KIRI | 31.06 ±0.20 | NRMD | 45.30 ±0.25 | VNDP | 24.29 ±0.32 |
| DARW | 59.24 ±0.20 | KOKB | 34.40 ±0.18 | OHI3 | 9.44 ±0.47 | XMIS | 55.25 ±0.29 |
| DAV1 | −5.43 ±0.17 | KRGG | −3.80 ±0.19 | POL2 | 4.71 ±0.23 | ||
| DGAR | 32.70 ±0.23 | MAC1 | 33.18 ±0.17 | REUN | 11.31 ±0.23 |
| Station | Velocity | Station | Velocity | Station | Velocity | Station | Velocity |
|---|---|---|---|---|---|---|---|
| AREQ | −0.44 ±0.57 | FAIR | −0.93 ±1.34 | MAL2 | −0.30 ±0.68 | RIO2 | 1.17 ±0.70 |
| BADG | 0.00 ±0.82 | GAMB | −1.69 ±0.66 | MAS1 | −0.71 ±0.52 | SALU | −1.73 ±0.75 |
| BAKE | 11.33 ±1.00 | GLPS | −2.59 ±0.99 | MATE | −0.30 ±0.60 | SANT | 7.64 ±0.82 |
| CHPI | 0.35 ±0.76 | GODN | −2.09 ±0.77 | MCIL | 0.99 ±0.87 | SCTB | −0.41 ±0.80 |
| CHTI | −0.33 ±0.62 | GUAM | −0.29 ±1.15 | MOBS | −0.76 ±0.57 | STHL | −0.42 ±0.77 |
| CKIS | 0.76 ±1.29 | GUAT | −0.05 ±1.24 | NANO | 0.72 ±0.67 | STJ3 | −1.51 ±0.87 |
| CPVG | −1.78 ±0.81 | HRAO | −0.63 ±0.52 | NKLG | −1.47 ±0.38 | THTG | −0.29 ±0.75 |
| CRO1 | −4.90 ±0.60 | IISC | −3.15 ±0.91 | NNOR | −0.90 ±0.56 | THU2 | 5.55 ±1.17 |
| DAEJ | 1.71 ±0.71 | KIRI | 0.37 ±0.83 | NRMD | −1.93 ±0.75 | VNDP | −0.69 ±0.96 |
| DARW | −0.21 ±0.78 | KOKB | 0.31 ±0.63 | OHI3 | 1.53 ±2.12 | XMIS | −0.38 ±0.87 |
| DAV1 | 0.73 ±0.71 | KRGG | 0.20 ±0.69 | POL2 | −0.65 ±0.82 | ||
| DGAR | −0.13 ±0.64 | MAC1 | −1.18 ±0.78 | REUN | −0.78 ±1.12 |
References
- Zeng, Y. GPS Velocity Field of the Western United States for the 2023 National Seismic Hazard Model Update. Seismol. Res. Lett. 2022, 93, 3121–3134. [Google Scholar] [CrossRef]
- García-Armenteros, J.A. Topo-Iberia CGPS network: A new 3D crustal velocity field in the Iberian Peninsula and Morocco based on 11 years (2008–2019). GPS Solut. 2023, 27, 155. [Google Scholar] [CrossRef]
- Altamimi, Z.; Rebischung, P.; Collilieux, X.; Métivier, L.; Chanard, K. ITRF2020: An augmented reference frame refining the modeling of nonlinear station motions. J. Geod. 2023, 97, 47. [Google Scholar] [CrossRef]
- Rebischung, P.; Altamimi, Z.; Métivier, L.; Collilieux, X.; Gobron, K.; Chanard, K. Analysis of the IGS contribution to ITRF2020. J. Geod. 2024, 98, 49. [Google Scholar] [CrossRef]
- Wang, H.; Dang, Y.M.; Hou, Y.F.; Mi, J.Z.; Wang, J.X.; Bai, G.X.; Cheng, Y.Y.; Zhang, S.J. Rapid and precise solution of the whole network of thousands of stations in China based on PPP network solution by UPD fixed technology. Acta Geod. Cartogr. Sin. 2020, 49, 278–291. [Google Scholar]
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise Point Positioning for the Efficient and Robust Analysis of GPS Data from Large Networks. J. Geophys. Res. 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Tu, R. Fast determination of displacement by PPP velocity estimation. Geophys. J. Int. 2013, 196, 1397–1401. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, Y.; Yu, C.; Wang, A.; Song, Z.; Zhou, J. Models and Performance of SBAS and PPP of BDS. Satell. Navig. 2022, 3, 4. [Google Scholar] [CrossRef]
- Wang, A.; Zhang, Y.; Chen, J.; Liu, X.; Wang, H. Regional Real-Time between-Satellite Single-Differenced Ionospheric Model Establishing by Multi-GNSS Single-Frequency Observations: Performance Evaluation and PPP Augmentation. Remote Sens. 2024, 16, 1511. [Google Scholar] [CrossRef]
- Su, K.; Jiao, G. Estimation of BDS Pseudorange Biases with High Temporal Resolution: Feasibility, Affecting Factors, and Necessity. Satell. Navig. 2023, 4, 17. [Google Scholar] [CrossRef]
- Ge, M.; Gendt, G.; Rothacher, M.A.; Shi, C.; Liu, J. Resolution of GPS carrier-phase ambiguities in Precise Point Positioning (PPP) with daily observations. J. Geod. 2008, 82, 389–399. [Google Scholar] [CrossRef]
- Guo, J.; Geng, J.; Wang, C. Impact of the Third Frequency GNSS Pseudorange and Carrier Phase Observations on Rapid PPP Convergences. GPS Solut. 2021, 25, 30. [Google Scholar] [CrossRef]
- Rabah, M.; Zedan, Z.; Ghanem, E.; Awad, A.; Sherif, A. Study the feasibility of using PPP for establishing CORS network. Arab. J. Geosci. 2016, 9, 613. [Google Scholar] [CrossRef]
- Arias-Gallegos, A.; Borque-Arancón, M.J.; Gil-Cruz, A.J. Present-Day Crustal Velocity Field in Ecuador from cGPS Position Time Series. Sensors 2023, 23, 3301. [Google Scholar] [CrossRef]
- Ogutcu, S.; Alcay, S.; Duman, H.; Ozdemir, B.N.; Konukseven, C. Static and kinematic PPP-AR performance of low-cost GNSS receiver in monitoring displacements. Adv. Space Res. 2023, 71, 4795–4808. [Google Scholar] [CrossRef]
- Nguyen, N.L.; Dang, V.C.B.; Pham, C. Determine Tectonic Motion Velocities of Some Vietnam CORSs Computed from PPP Coordinates When Using IGS and CNES Products. In Proceedings of the Third International Conference on Sustainable Civil Engineering and Architecture. ICSCEA 2023; Reddy, J.N., Wang, C.M., Luong, V.H., Le, A.T., Eds.; Lecture Notes in Civil Engineering; Springer: Singapore, 2024; Volume 442. [Google Scholar] [CrossRef]
- Chen, G.; Wei, N.; Tao, J.; Zhao, Q. Comparison between GPS network analysis with undifferenced and double differenced integer ambiguity resolution: A practical perspective. Adv. Space Res. 2024, 74, 582–595. [Google Scholar] [CrossRef]
- Bock, Y.; Fang, P.; Knox, A.; Sullivan, A.; Jiang, S.; Guns, K.; Golriz, D. Extended Solid Earth Science ESDR System (ES3): Algorithm Theoretical Basis Document (ATBD). Available online: http://garner.ucsd.edu/pub/measuresESESES_products/ATBD/ESESES-ATBD.pdf (accessed on 10 February 2025).
- Geng, J.; Yan, Z.; Wen, Q.; Männel, B.; Masoumi, S.; Loyer, S.; Mayer-Gürr, T.; Schaer, S. Integrated satellite clock and code/phase bias combination in the third IGS reprocessing campaign. GPS Solut. 2024, 28, 150. [Google Scholar] [CrossRef]
- GNSS Analysis Center at Shanghai Astronomical Observatory. Net_Diff ver.1.16 Manual. Available online: http://202.127.29.4/shao_gnss_ac/ (accessed on 10 February 2025).
- Zhang, Y.Z.; Chen, J.P.; Gong, X.Q.; Chen, Q. The update of BDS-2 TGD and its impact on positioning. Adv. Space Res. 2020, 65, 2645–2661. [Google Scholar] [CrossRef]
- Dong, D.N.; Fang, P.; Bock, Y.; Webb, F.; Prawirodirdjo, L.; Kedar, S.; Jamason, P. Spatiotemporal Filtering Using Principal Component Analysis and Karhunen-Loeve expansion approaches for regional GPS network analysis. J. Geophys. Res. 2006, 111, B03405. [Google Scholar] [CrossRef]
- International GNSS Service. Available online: ftp://igs-rf.ign.fr/pub/IGS20/IGS20_core.txt (accessed on 10 February 2025).
- Blewitt, G.; Lavallée, D. Effect of annual signals on geodetic velocity. J. Geophys. Res. Solid Earth 2002, 107, 2068. [Google Scholar] [CrossRef]
- Geng, J.H.; Yan, Z.; Wen, Q. Multi-GNSS Satellite Clock and Bias Product Combination: The Third IGS Reprocessing Campaign. Geomat. Inf. Sci. Wuhan Univ. 2023, 48, 1070–1081. [Google Scholar] [CrossRef]
- Geng, J.H.; Chen, X.Y.; Pan, Y.X.; Zhao, Q.L. A modified phase clock/bias model to improve PPP ambiguity resolution at Wuhan University. J. Geod. 2019, 93, 2053–2067. [Google Scholar] [CrossRef]
- Wang, J.X.; Chen, J.P. Development and application of GPS precise positioning software. J. Tongji Univ. (Nat. Sci.) 2011, 39, 764–767. [Google Scholar]
- Zhang, X.H.; Ren, X.D.; Guo, F. Influence of higher-order ionospheric delay correction on static precise point positioning. Geomat. Inf. Sci. Wuhan Univ. 2013, 38, 883–887. [Google Scholar] [CrossRef]
- Geng, J.; Meng, X.; Dodson, A.H.; Teferle, F.N. Integer Ambiguity Resolution in Precise Point Positioning: Method Comparison. J. Geod. 2010, 84, 569–581. [Google Scholar] [CrossRef]
- Petit, G.; Luzum, B. IERS Conventions Centre. IERS Technical Note No. 36. Available online: https://www.iers.org/SharedDocs/Publikationen/EN/IERS/Publications/tn/TechnNote36/tn36.pdf?__blob=publicationFile&v=1 (accessed on 10 February 2025).
- Duman, H. GNSS-specific characteristic signals in power spectra of multi-GNSS coordinate time series. Adv. Space Res. 2024, 63, 1234–1245. [Google Scholar] [CrossRef]
- Bitharis, S. GPS data analysis and geodetic velocity field investigation in Greece, 2001–2016. GPS Solut. 2023, 27, 16. [Google Scholar] [CrossRef]
- Wang, R.Y.; Chen, J.P.; Dong, D.N.; Tan, W.J.; Liao, X.H. Regional GNSS Common Mode Error Correction to Refine the Global Reference Frame. Remote Sens. 2024, 16, 4469. [Google Scholar] [CrossRef]
- Chen, B.Z.; Bian, J.W.; Ding, K.H.; Wu, H.C.; Li, H.W. Extracting Seasonal Signals in GNSS Coordinate Time Series via Weighted Nuclear Norm Minimization. Remote Sens. 2020, 12, 2027. [Google Scholar] [CrossRef]
- International GNSS Service. Available online: https://files.igs.org/pub/station/log/ (accessed on 10 February 2025).
- International GNSS Service. Available online: https://igs.org/products/#about (accessed on 10 February 2025).
- Williams, S.D.P. The Effect of Coloured Noise on the Uncertainties of Rates Estimated from Geodetic Time Series. J. Geod. 2003, 76, 483–494. [Google Scholar] [CrossRef]
- Altamimi, Z.; Métivier, L.; Rebischung, P.; Collilieux, X.; Chanard, K.; Barnéoud, J. ITRF2020 plate motion model. Geophys. Res. Lett. 2023, 50, e2023GL106373. [Google Scholar] [CrossRef]
- Davis, J.L.; Wernicke, B.P.; Tamisiea, M.E. On seasonal signals in geodetic time series. J. Geophys. Res. Solid Earth 2012, 117, B01403. [Google Scholar] [CrossRef]
- Klos, A.; Olivares, G.; Teferle, F.N.; Hunegnaw, A.; Bogusz, J. On the combined effect of periodic signals and colored noise on velocity uncertainties. GPS Solut. 2018, 22, 1. [Google Scholar] [CrossRef]
- Dong, D.; Fang, P.; Bock, Y.; Cheng, M.K.; Miyazaki, S. Anatomy of apparent seasonal variations from GPS-derived site position time series. J. Geophys. Res. 2001, 107, 2075. [Google Scholar] [CrossRef]
- Wang, S.Y.; Li, J.; Chen, J.; Hu, X.G. Uncertainty Assessments of Load Deformation from Different GPS Time Series Products, GRACE Estimates and Model Predictions: A Case Study over Europe. Remote Sens. 2021, 13, 2765. [Google Scholar] [CrossRef]
- Geng, J.; Chen, X.Y.; Pan, Y.X.; Mao, S.; Li, C.; Zhou, J.; Zhang, K. PRIDE PPP-AR: An open-source software for GPS PPP ambiguity resolution. GPS Solut. 2019, 23, 91. [Google Scholar] [CrossRef]



| Item | Strategies |
|---|---|
| Satellite system | GPS, Galileo |
| Data sampling rate | 30s |
| Elevation cutoff angle | 7 |
| Observations noise | code: 30 cm, phase: 3 mm |
| Satellite orbit and clock | IGS Repro3 precise products provided by WUM |
| Observable-specific bias | IGS Repro3 precise products provided by WUM |
| Phase center offset | igsR3_2135.atx |
| Tropospheric delay | Initial value: GPT2w + SAAS + VMF1 remaining wet delay: random walk parameter [27] |
| Ionospheric delay | Ionosphere-free combination [28] |
| Ambiguity fixed method | Wide-lane: rounding; narrow-lane: LAMBDA [29] |
| Earth deformation correction | IERS Conventions 2010 [30,31] |
| Tx mm | Ty mm | Tz mm | Rx mas | Ry mas | Rz mas | D ppb | |
|---|---|---|---|---|---|---|---|
| x mm/yr | y mm/yr | z mm/yr | x mas/yr | y mas/yr | z mas/yr | ppb/yr | |
| Value | −1.10 ±0.53 | −0.01 ±0.53 | −0.25 ±0.53 | 0.001 ±0.021 | −0.002 ±0.021 | −0.022 ±0.021 | 0.38 ±0.08 |
| Trend | 0.22 ±0.64 | −0.03 ±0.73 | 0.23 ±0.71 | 0.001 ±0.012 | −0.000 ±0.011 | 0.002 ±0.024 | 0.06 ±0.12 |
| Year | Coordinates Derived from PPP-AR | Coordinates Derived from IGS R3 | ||||
|---|---|---|---|---|---|---|
| E | N | U | E | N | U | |
| 2020 | 2.23 | 2.24 | 6.40 | 2.11 | 2.12 | 5.86 |
| 2021 | 2.53 | 2.31 | 6.57 | 2.53 | 2.27 | 6.07 |
| 2022 | 3.28 | 2.76 | 7.25 | 3.24 | 2.83 | 7.01 |
| 2023 | 4.04 | 5.60 | 7.79 | 4.15 | 5.64 | 7.71 |
| 2024 | 4.84 | 5.68 | 8.74 | 4.81 | 5.74 | 8.31 |
| Strategy | Residual Time Series | Post-Transformation Residuals | ||||
|---|---|---|---|---|---|---|
| E | N | U | E | N | U | |
| PPP | 2.64 | 1.72 | 5.93 | 2.47 | 1.37 | 4.72 |
| PPP-AR | 2.30 | 1.70 | 5.86 | 2.08 | 1.34 | 4.65 |
| Tx mm | Ty mm | Tz mm | Rx mas | Ry mas | Rz mas | D ppb | |
|---|---|---|---|---|---|---|---|
| x mm/yr | y mm/yr | z mm/yr | x mas/yr | y mas/yr | z mas/yr | ppb/y | |
| Value | −1.18 ±0.49 | 0.30 ±0.49 | −0.10 ±0.49 | 0.003 ±0.019 | −0.002 ±0.020 | −0.023 ±0.019 | 0.42 ±0.08 |
| Trend | 0.23 ±0.68 | −0.06 ±0.75 | 0.23 ±0.72 | 0.001 ±0.012 | 0.000 ±0.012 | 0.002 ±0.026 | 0.06 ±0.12 |
| Strategy | Uncertainty of Velocity | Velocity Difference | ||||
|---|---|---|---|---|---|---|
| E | N | U | E | N | U | |
| PPP | 0.31 | 0.23 | 0.86 | 0.37 | 0.19 | 0.69 |
| PPP-AR | 0.29 | 0.23 | 0.82 | 0.32 | 0.19 | 0.67 |
| IGS R3 | 0.18 | 0.18 | 0.58 | / | / | / |
| Strategy | Annual | Semi-Annual | ||||
|---|---|---|---|---|---|---|
| E | N | U | E | N | U | |
| PPP | 0.31 | 0.27 | 0.68 | 0.40 | 0.12 | 0.43 |
| PPP-AR | 0.36 | 0.27 | 0.68 | 0.31 | 0.12 | 0.43 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, R.; Chen, J.; Zhang, Y.; Tan, W.; Liao, X. Contribution of PPP with Ambiguity Resolution to the Maintenance of Terrestrial Reference Frame. Remote Sens. 2025, 17, 1183. https://doi.org/10.3390/rs17071183
Wang R, Chen J, Zhang Y, Tan W, Liao X. Contribution of PPP with Ambiguity Resolution to the Maintenance of Terrestrial Reference Frame. Remote Sensing. 2025; 17(7):1183. https://doi.org/10.3390/rs17071183
Chicago/Turabian StyleWang, Ruyuan, Junping Chen, Yize Zhang, Weijie Tan, and Xinhao Liao. 2025. "Contribution of PPP with Ambiguity Resolution to the Maintenance of Terrestrial Reference Frame" Remote Sensing 17, no. 7: 1183. https://doi.org/10.3390/rs17071183
APA StyleWang, R., Chen, J., Zhang, Y., Tan, W., & Liao, X. (2025). Contribution of PPP with Ambiguity Resolution to the Maintenance of Terrestrial Reference Frame. Remote Sensing, 17(7), 1183. https://doi.org/10.3390/rs17071183