
Clutter Modeling and Characteristics Analysis for GEO Spaceborne-Airborne Bistatic Radar


Abstract
:1. Introduction
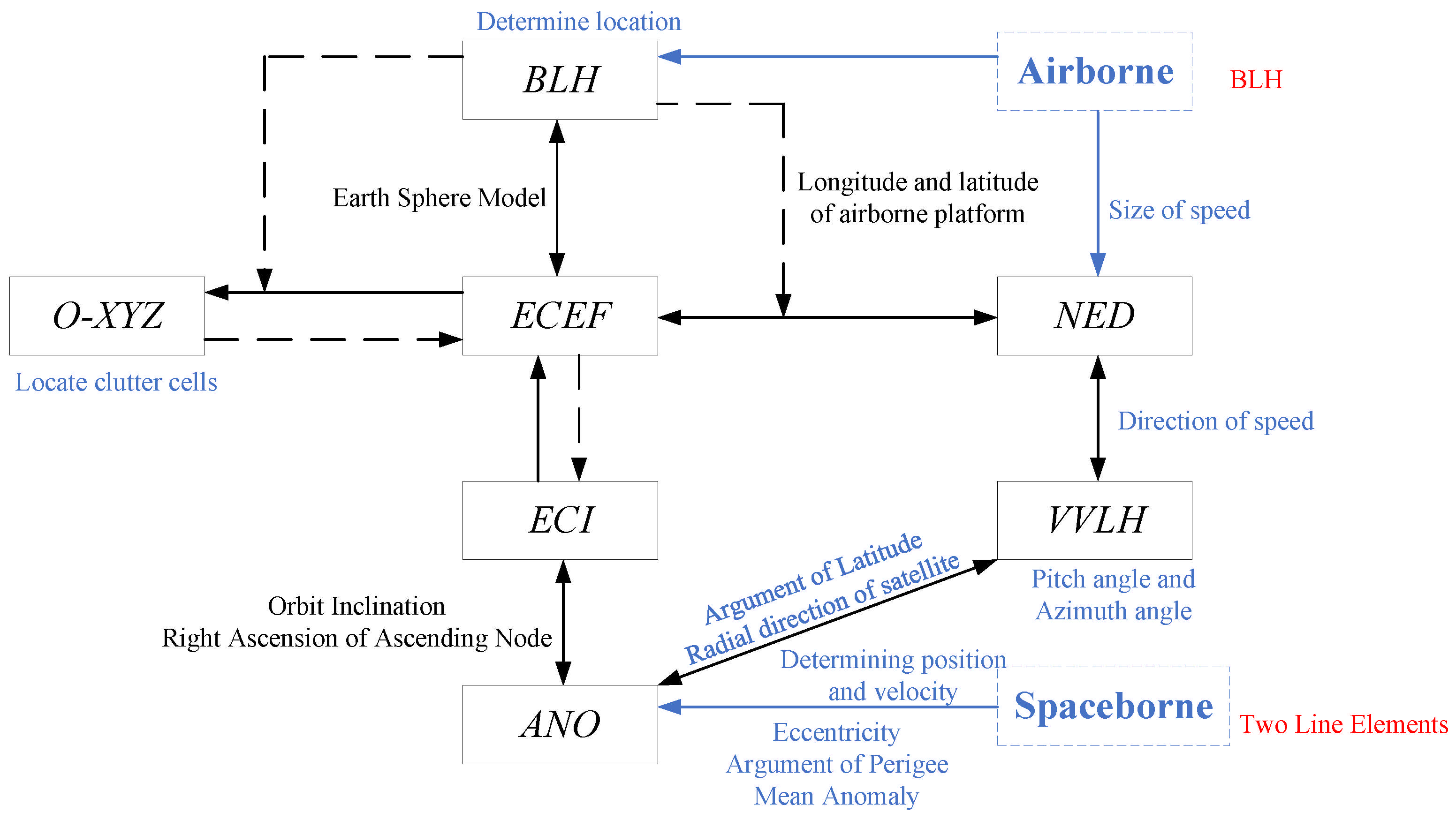
- An SABR clutter signal model for arbitrary geometric configurations is developed based on rigorous coordinate system transformations and satellite-to-Earth geometrical relationships, taking into account the actual radar detection range at the receiver end, as well as the elliptical orbit of the satellite, the curvature of the Earth, and the rotation.
- Based on the proposed model, the non-side-looking receiver clutter characteristics under the geostationary satellite-to-airborne receiver configuration are first analyzed. In conjunction with an evaluation model, the effects of observation areas and geometric configurations on detection performance are investigated using the output signal-to-clutter-noise ratio loss (SCNRloss) as the performance metric. Finally, recommendations for selecting transceiver geometric configurations and detection areas are presented.
2. Geometrical Configuration and Space-Time Clutter Model for SABR
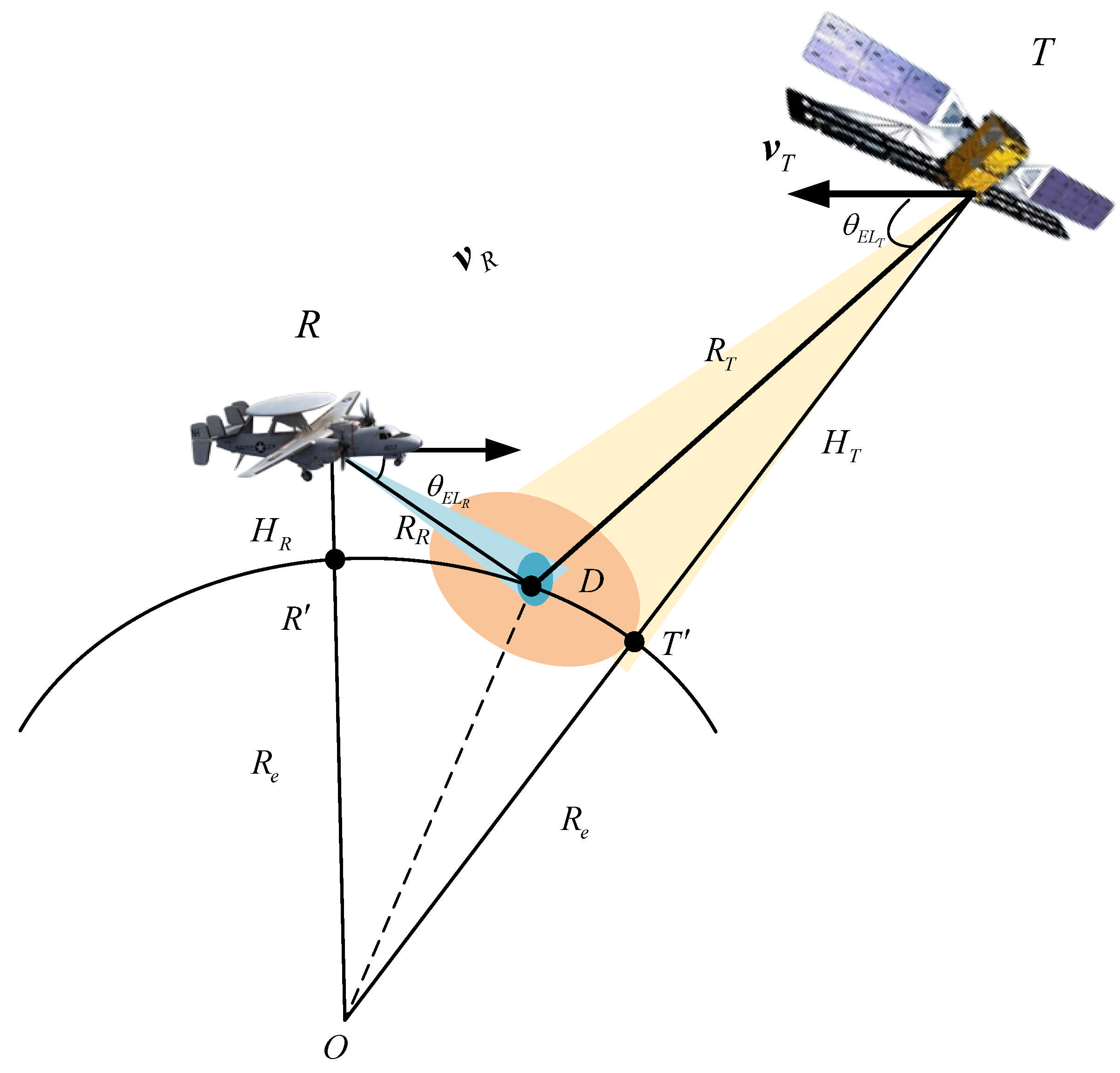
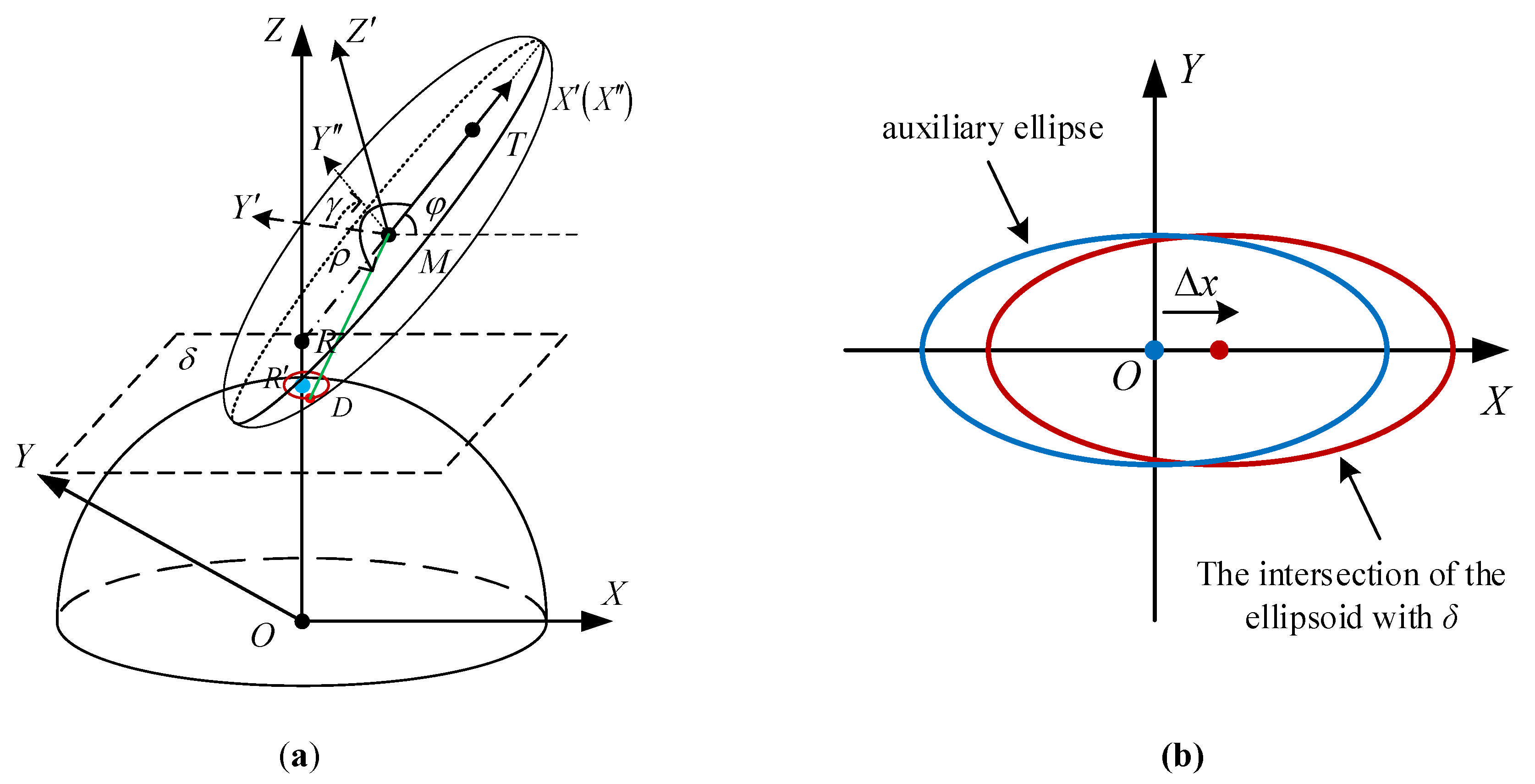
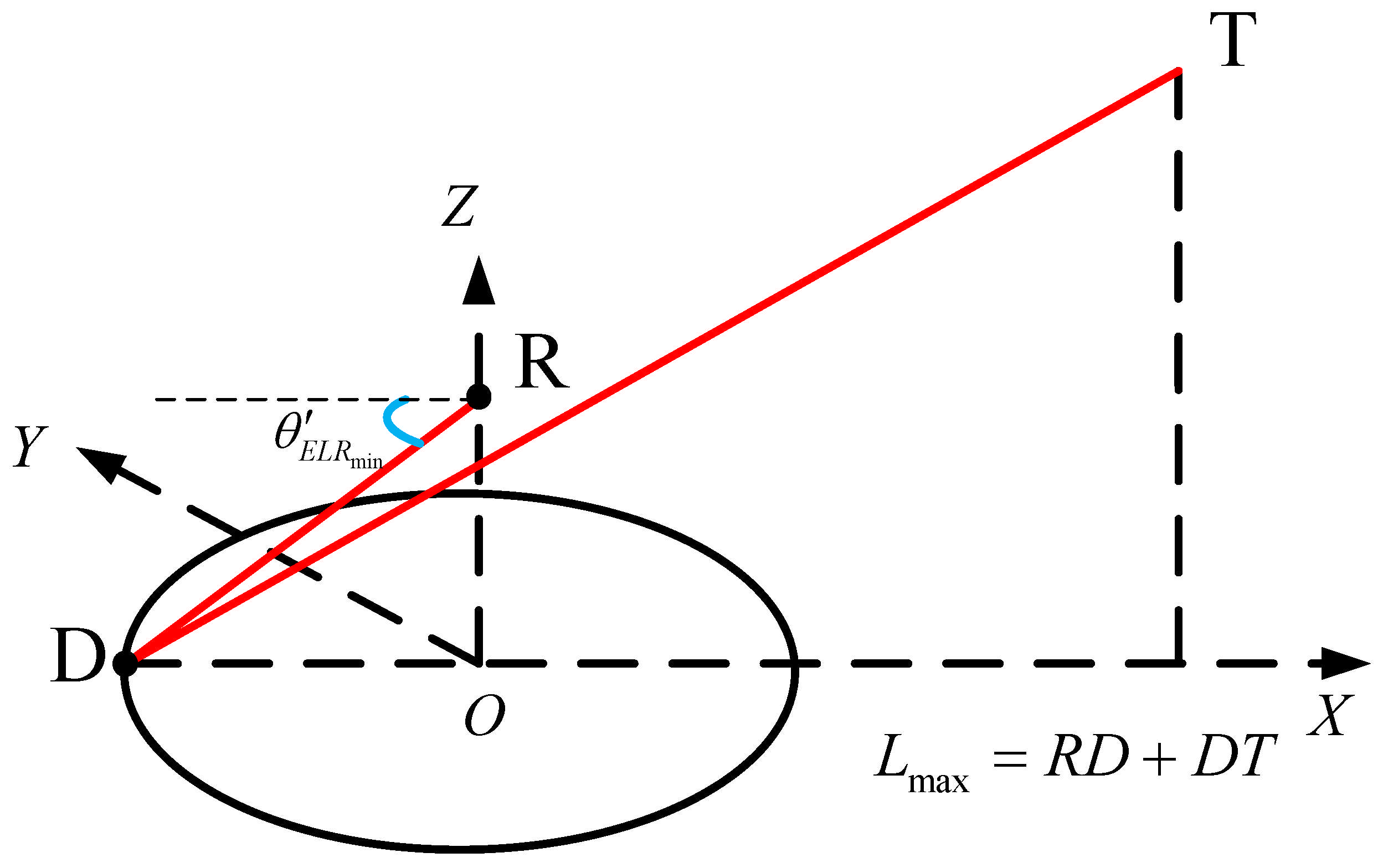
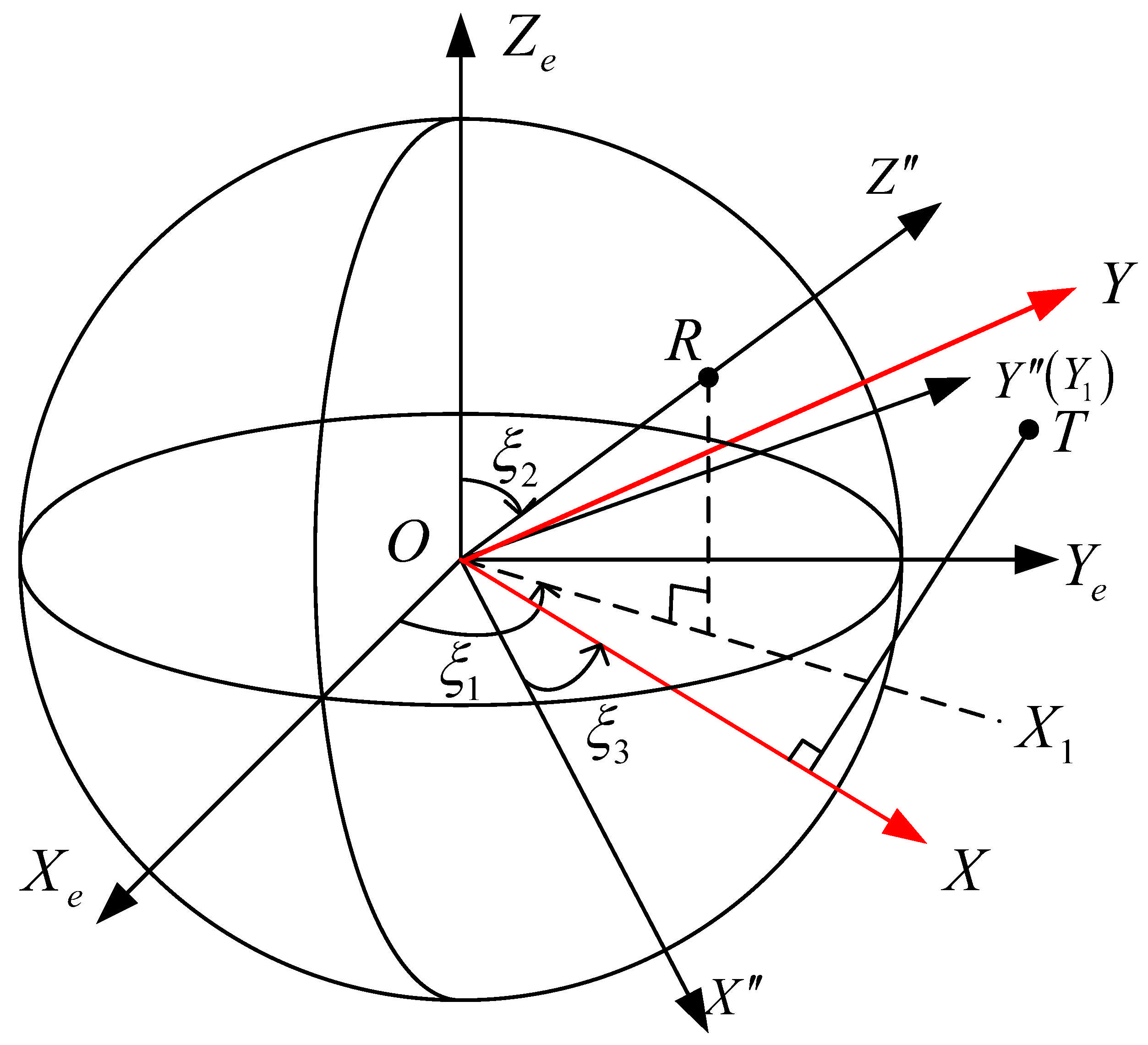
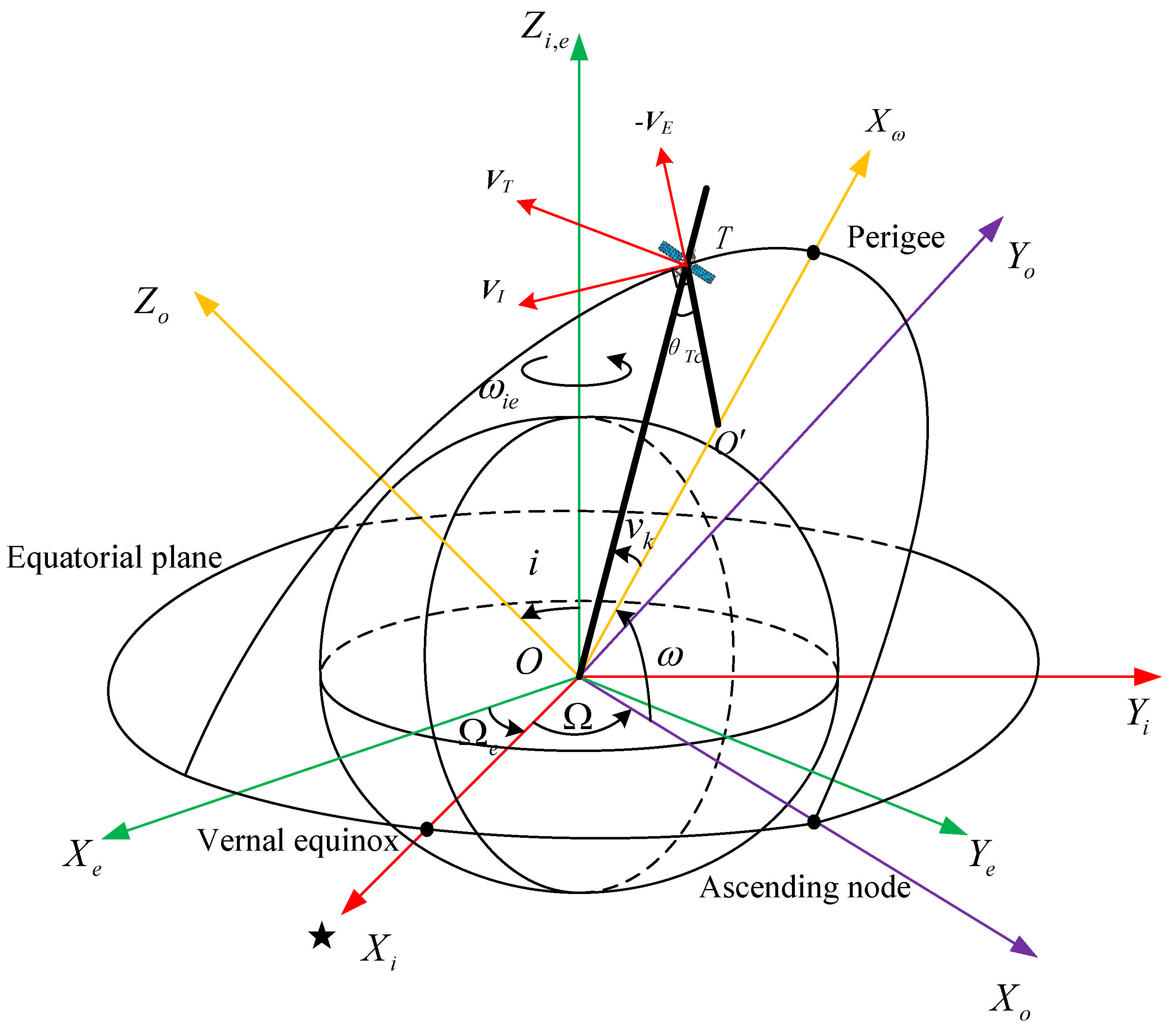
2.1. Geometrical Configuration of SABR
2.2. Transmit Doppler Frequency of SABR
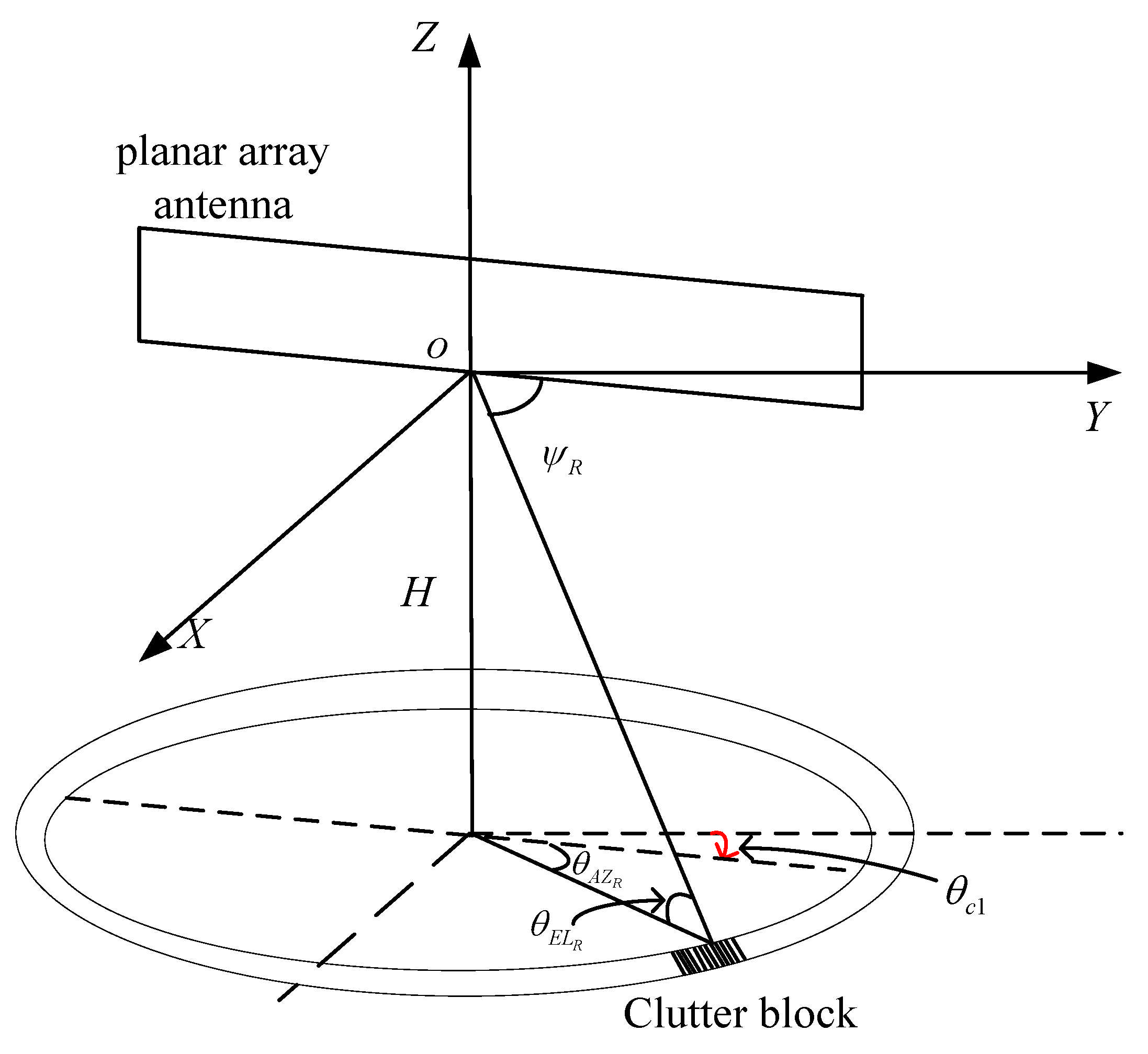
2.3. Receive Doppler Frequency and Spatial Frequency of SABR
2.4. Clutter Signal Model
2.5. Clutter Suppression Capability Evaluation Model
3. Analysis of Clutter Characteristics in Various Observational Regions
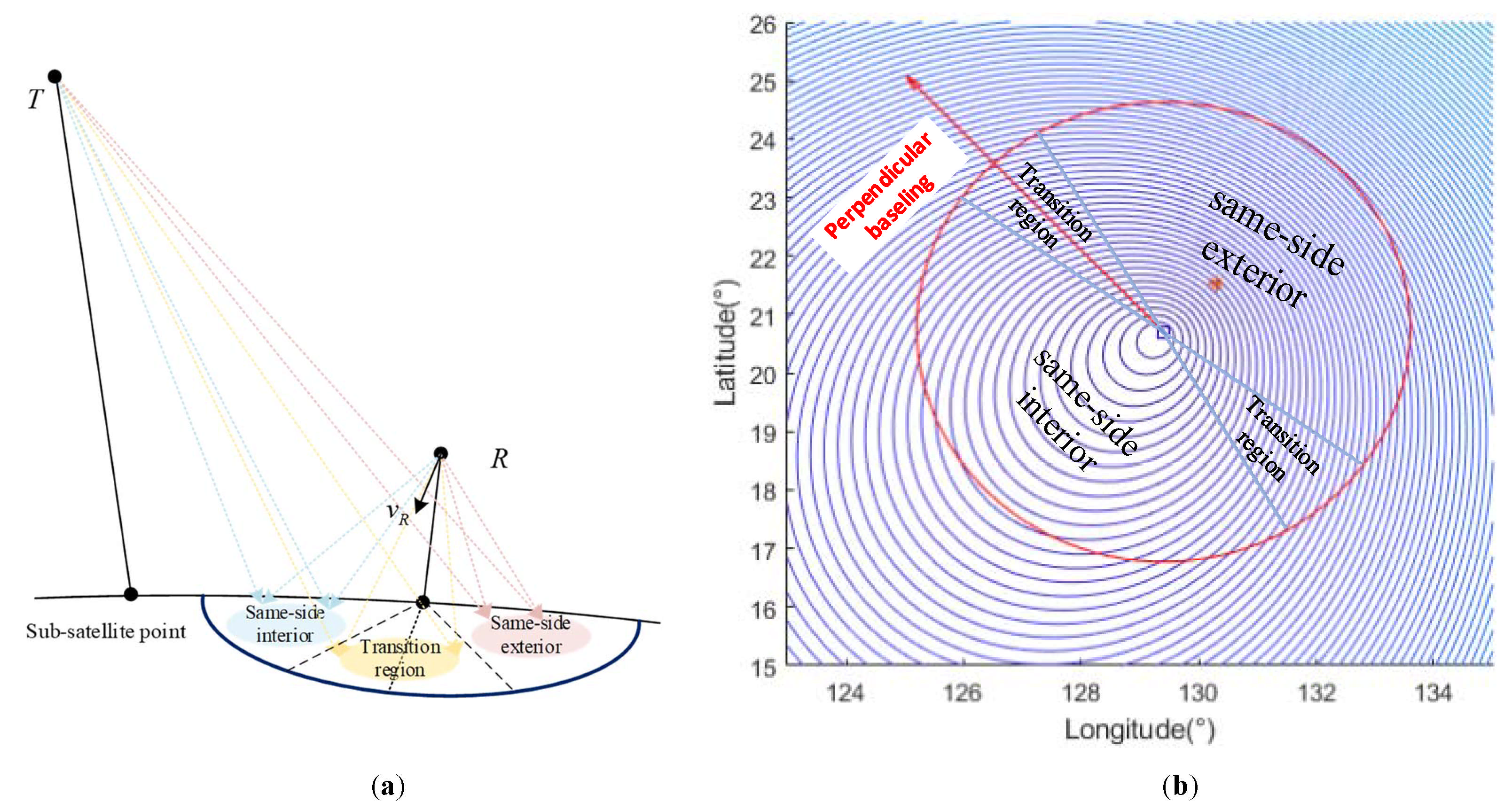
3.1. Clutter Characterization
3.2. Analysis of Clutter Suppression Capability
4. Conclusions
- (1)
- The number of distance blurs is maximal when the receiver is flying perpendicular to the baseline and away from the transmitter, and it reaches a minimum as the flight direction moves closer to the transmitter and vertically toward the baseline.
- (2)
- In the case of airborne side-looking array reception, although the number of distance blurs is higher in the same-side exterior region at the iso-range ring, the effect of distance blurring is minimal, as both the yaw angle and the cosine of the cone angle are zero. The remains constant at 11.4% across all four cases. The distance blurring is less in the same-side interior region compared to the same-side exterior, with the highest number of distance blurs observed along the baseline direction in the same-side exterior and the lowest in the same-side interior along the baseline direction. Additionally, the gap in the number of distance blurs increases as the angle increases.
- (3)
- In the case of airborne non-side-looking array reception, the effect of distance blurring leads to significantly greater clutter spread in the front-view and rear-view arrays compared to the antenna slant-view array. As a result, the minimum detectable speed in the outer region (45.57 m/s) is substantially higher than that in the inner region (34.54 m/s).
- (4)
- To reduce distance ambiguity and improve the minimum detectable speed, these objectives can be achieved through an optimal transceiver geometry configuration. The transmitter and receiver are positioned on opposite sides of the detection area, with a sizeable angle selected. Additionally, the detection area should be placed as close as possible to the inner region along the baseline direction.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hartnett, M.; Davis, M. Operations of an Airborne Bistatic Adjunct to Space Based Radar. In Proceedings of the 2003 IEEE Radar Conference (Cat. No. 03CH37474), Huntsville, AL, USA, 8 May 2003; pp. 133–138. [Google Scholar]
- Davis, M.; Himed, B.; Zasada, D. Design of Large Space Based Radar for Multimode Surveillance. In Proceedings of the 2003 IEEE Radar Conference (Cat. No. 03CH37474), Huntsville, AL, USA, 8 May 2003; pp. 1–6. [Google Scholar]
- Hartnett, M.; Davis, M. Bistatic Surveillance Concept of Operations. In Proceedings of the 2001 IEEE Radar Conference (Cat. No. 01CH37200), Atlanta, GA, USA, 3 May 2001; pp. 75–80. [Google Scholar]
- Hsu, Y.; Lorti, D. Spaceborne Bistatic Radar—An Overview. IEEE Proc. F Commun. Radar Signal Process. 1986, 133, 642–648. [Google Scholar] [CrossRef]
- Griffiths, H. From a Different Perspective: Principles, Practice and Potential of Bistatic Radar. In Proceedings of the 2003 International Conference on Radar (IEEE Cat. No. 03EX695); Adelaide, SA, Australia, 3–5 September 2003, pp. 1–7.
- Zhang, Q.; Dong, Z.; Zhang, Y.; He, Z. GEO-UAV Bistatic Circular Synthetic Aperture Radar: Concepts and Technologies. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 4195–4198. [Google Scholar]
- Guttrich, G.; Sievers, W.; Tomljanovich, N. Wide Area Surveillance Concepts Based on Geosynchronous Illumination and Bistatic Unmanned Airborne Vehicles or Satellite Reception. In Proceedings of the 1997 IEEE National Radar Conference, Syracuse, NY, USA, 13–15 May 1997; pp. 126–131. [Google Scholar]
- Han, L.; Chen, Z.; Duan, R.; Jiang, C. Modeling of Varying Geometrical Scenarios of Bistatic Radar. In Proceedings of the 2007 International Symposium on Intelligent Signal Processing and Communication Systems, Xiamen, China, 28 November–1 December 2007; pp. 196–199. [Google Scholar]
- Pillai, U.; Li, K.; Himed, B. Space Based Radar: Theory and Applications; McGraw-Hill: New York, NY, USA, 2008. [Google Scholar]
- Li, W.; Wang, L.; Liu, D.; Chen, T.; Li, Z.; Wu, J.; Yang, H.; Yang, J. Raw Data Simulation under Undulating Terrain for Bistatic SAR with Arbitrary Configuration. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 12878–12892. [Google Scholar] [CrossRef]
- Liu, K.; Wang, T.; Huang, W. An Efficient Sparse Recovery STAP Algorithm for Airborne Bistatic Radars Based on Atomic Selection under the Bayesian Framework. Remote Sens. 2024, 16, 2534. [Google Scholar] [CrossRef]
- Tan, X.; Yang, Z.; Li, X.; Liu, L.; Li, X. Clutter Rank Estimation Method for Bistatic Radar Systems Based on Prolate Spheroidal Wave Functions. Remote Sens. 2024, 16, 2928. [Google Scholar] [CrossRef]
- Liu, J.; Liao, G. Spaceborne-Airborne Bistatic Radar Clutter Modeling and Analysis. In Proceedings of the 2011 IEEE CIE International Conference on Radar, Chengdu, China, 24–27 October 2011; Volume 1, pp. 915–918. [Google Scholar]
- Liu, N.; Zhang, L.; Yi, Y.; Liu, X. Clutter modeling and analysis for spaceborne bistatic radar. In Proceedings of the 2007 IET International Conference on Radar Systems, Edinburgh, UK, 15–18 October 2007; IET: London, UK, 2007; pp. 1–5. [Google Scholar]
- Li, H.; Tang, J.; Peng, Y. Clutter Modeling and Characteristics Analysis for Bistatic SBR. In Proceedings of the 2007 IEEE Radar Conference, Waltham, MA, USA, 17–20 April 2007; pp. 513–517. [Google Scholar]
- Zhang, C.; Liu, H.; Long, T. Signal-to-Noise Ratio Analysis in Satellite-Airship Bistatic Space Based Radar. In Proceedings of the 2008 International Conference on Radar, Adelaide, SA, Australia, 2–5 September 2008; pp. 434–439. [Google Scholar]
- Sun, Z.; Wu, J.; Pei, J.; Li, Z.; Huang, Y.; Yang, J. Inclined Geosynchronous Spaceborne–Airborne Bistatic SAR: Performance Analysis and Mission Design. IEEE Trans. Geosci. Remote Sens. 2016, 54, 343–357. [Google Scholar] [CrossRef]
- Rodriguez-Cassola, M.; Baumgartner, S.; Krieger, G.; Moreira, A. Bistatic TerraSAR-X/F-SAR Spaceborne–Airborne SAR Experiment: Description, Data Processing, and Results. IEEE Trans. Geosci. Remote Sens. 2010, 48, 781–794. [Google Scholar] [CrossRef]
- Espeter, T.; Walterscheid, I.; Klare, J.; Ender, J. Synchronization Techniques for the Bistatic Spaceborne/Airborne SAR Experiment with TerraSAR-X and PAMIR. In Proceedings of the 2007 IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–28 July 2007; pp. 2160–2163. [Google Scholar]
- Wang, W.Q.; Shao, H. Azimuth-Variant Signal Processing in High-Altitude Platform Passive SAR with Spaceborne/Airborne Transmitter. Remote Sens. 2013, 5, 1292–1310. [Google Scholar] [CrossRef]
- Huang, P.; Zou, Z.; Xia, X.G.; Liu, X.; Liao, G.; Xin, Z. Multichannel Sea Clutter Modeling for Spaceborne Early Warning Radar and Clutter Suppression Performance Analysis. IEEE Trans. Geosci. Remote Sens. 2021, 59, 8349–8366. [Google Scholar] [CrossRef]
- Li, Z.; Ye, H.; Liu, Z.; Sun, Z.; An, H.; Wu, J.; Yang, J. Bistatic SAR Clutter-Ridge Matched STAP Method for Nonstationary Clutter Suppression. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–14. [Google Scholar] [CrossRef]
- Liu, Z.; Ye, H.; Li, Z.; Yang, Q.; Sun, Z.; Wu, J.; Yang, J. Optimally Matched Space-Time Filtering Technique for BFSAR Nonstationary Clutter Suppression. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–17. [Google Scholar] [CrossRef]
- Zhang, S.; Gao, Y.; Xing, M.; Guo, R.; Chen, J.; Liu, Y. Ground Moving Target Indication for the Geosynchronous-Low Earth Orbit Bistatic Multichannel SAR System. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 5072–5090. [Google Scholar] [CrossRef]
- Zhang, T.; Wang, Z.; Xing, M.; Zhang, S.; Wang, Y. Research on Multi-Domain Dimensionality Reduction Joint Adaptive Processing Method for Range Ambiguous Clutter of FDA-Phase-MIMO Space-Based Early Warning Radar. Remote Sens. 2022, 14, 5536. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, W.; Zhang, T.; Xing, M.; Wang, Y. Improved Dimension-Reduced Structures of 3D-STAP on Nonstationary Clutter Suppression for Space-Based Early Warning Radar. Remote Sens. 2022, 14, 4011. [Google Scholar] [CrossRef]
- Li, H.; Tang, J.; Peng, Y. Effects of Geometry on Clutter Characteristics of Hybrid Bistatic Space Based Radar. In Proceedings of the 2006 CIE International Conference on Radar, Shanghai, China, 16–19 October 2006; pp. 1–4. [Google Scholar]
- Kan, Q.; Xu, J.; Liao, G.; Zhang, Y.; Xu, Y.; Wang, W. Clutter Characteristics Analysis and Range-Dependence Compensation for Space–Air Bistatic Radar. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–15. [Google Scholar] [CrossRef]
- Blinn, J.F.; Newell, M.E. Clipping using homogeneous coordinates. In Proceedings of the 5th Annual Conference on Computer Graphics and Interactive Techniques, Atlanta, GA, USA, 23–25 August 1978; pp. 245–251. [Google Scholar]
- Xie, G. Principles of GPS and Receiver Design; Publishing House of Electronics Industry: Beijing, China, 2009; Volume 7, pp. 61–63. [Google Scholar]
- Zulch, P.; Davis, M.; Adzima, L.; Hancock, R.; Theis, S. The Earth Rotation Effect on a LEO L-Band GMTI SBR and Mitigation Strategies. In Proceedings of the 2004 IEEE Radar Conference (IEEE Cat. No. 04CH37509), Philadelphia, PA, USA, 29 April 2004; pp. 27–32. [Google Scholar]
- Tan, X.; Yang, Z.W.; He, P.Y.; Wu, X.Y. Analysis of clutter characteristics and parameters selection for following configuration of spaceborne bistatic radar. Syst. Eng. Electron. 2023, 45, 2735–2743. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value (Transmitter/Receiver) |
|---|---|
| Platform height (HT/HR) | 35,786 km/15 km |
| Orbit inclination (i) | 0/– |
| Right ascension of ascending node () | 192.71°/– |
| Argument of periapsis () | 251.83°/– |
| Eccentricity (e) | 0/– |
| True anomaly () | 10.76°/– |
| Parameters | Value and Units |
|---|---|
| Carrier frequency | 1.25 GHz |
| Bandwidth | 1 MHz |
| Number of pulses in a CPI | 256 |
| Channel spacing | 0.12 |
| Pulse repetition frequency | 2 kHz |
| Noise figure | 2.5 dB |
| Number of emission channels | 668 |
| Number of receive channels | 100 |
| Yaw 30° | Yaw 60° | Yaw 90° | Yaw −90° | |
|---|---|---|---|---|
| Vertical Baseline/zone | 22.6% (same-side exterior) | 32.2% (same-side exterior) | 42.6% (Transition) | 39.6% (Transition) |
| Along Baseline/zone | 21.8% (same-side interior) | 22.8% (same-side interior) | 38.4% (same-side interior) | 41.6% (same-side exterior) |
| Along East/zone | 20.6% (same-side interior) | 20.6% (same-side interior) | 35.6% (same-side interior) | 44.4% (same-side exterior) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, S.; Zhang, S.; Guo, T.; Xu, R.; Liu, Z.; Du, Q. Clutter Modeling and Characteristics Analysis for GEO Spaceborne-Airborne Bistatic Radar. Remote Sens. 2025, 17, 1222. https://doi.org/10.3390/rs17071222
Zhang S, Zhang S, Guo T, Xu R, Liu Z, Du Q. Clutter Modeling and Characteristics Analysis for GEO Spaceborne-Airborne Bistatic Radar. Remote Sensing. 2025; 17(7):1222. https://doi.org/10.3390/rs17071222
Chicago/Turabian StyleZhang, Shuo, Shuangxi Zhang, Tianhua Guo, Ruiqi Xu, Zicheng Liu, and Qinglei Du. 2025. "Clutter Modeling and Characteristics Analysis for GEO Spaceborne-Airborne Bistatic Radar" Remote Sensing 17, no. 7: 1222. https://doi.org/10.3390/rs17071222
APA StyleZhang, S., Zhang, S., Guo, T., Xu, R., Liu, Z., & Du, Q. (2025). Clutter Modeling and Characteristics Analysis for GEO Spaceborne-Airborne Bistatic Radar. Remote Sensing, 17(7), 1222. https://doi.org/10.3390/rs17071222